抗差在GPS/BDS 組合定位中的作用分析
2021-12-13 07:31:36韓澎濤丁新展施佳慧
科學技術創新 2021年33期
韓澎濤 丁新展 施佳慧
(1、泰山科技學院,山東泰安 271000 2、沈陽市勘察測繪研究院有限公司,遼寧沈陽 110000)
精密單點定位(Precise Point Positioning, PPP)作為新興起的定位方式被廣泛的應用于各種實際問題當中,例如工程測量、變形監測和衛星定軌等[1-2]。在日常應用中所測得的數據難免伴隨著各種誤差,為了控制誤差對定位結果的影響,學者們提出了多種有效的抗差方法,從最初的數據探測法到后續的Huber 法、丹麥法和IGG 法,所有抗差方法存在共性,便都是計算等價權矩陣。
本文針對城市環境下,定位結果受噪聲影響嚴重情況進行研究。主要利用實測數據在雙頻無電離層組合模型下進行PPP,并對數據探測法和IGG III 模型的抗差能力進行研究。
1 數據處理原理
1.1 雙頻無電離層組合定位模型
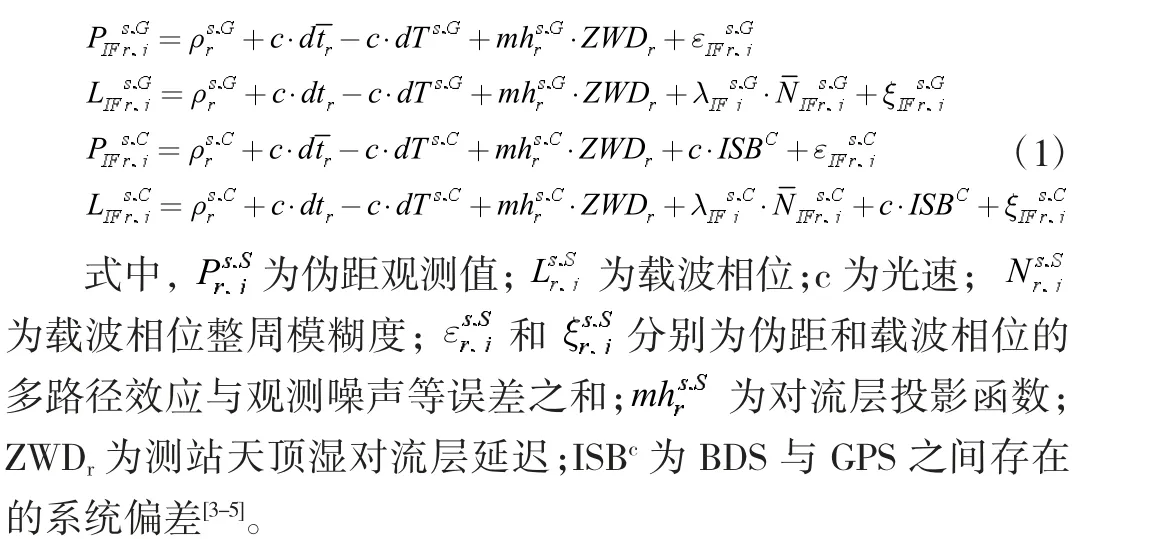
1.2 抗差模型
數據探測法于1968 年被荷蘭學者巴爾達(Baarda)教授提出。假定一個平差系統僅存在一個粗差是數據探測法的核心思想,通過統計檢驗的方法剔除該粗差,在剔除第一個粗差后進行循環迭代剔除下一個粗差,直至認定該系統不存在粗差后再進行平差。
相較于數據探測法IGG 抗差模型應用更廣,將觀測數據分劃為三類,通過三段式函數進行定權[6]。將觀測值分置三個區域,分別是拒絕區、降權區和保權區。目前由國內學者提出的IGG III 方案應用最為廣泛,相比于傳統IGG 法具備有界、分段、高效和連續的特性。可以充分的利用到準確觀測值和可疑觀測值,并達到抑制異常值對結果造成影響的作用,可以起到顯著的抗差效果。改進后的IGG III 權函數為:

式中,vi為標準化殘差;pi和pi分別為等價權矩陣和原始權矩陣;c0和c1為調和系數,一般c0取1.0~1.5,c1取2.0~3.0。
2 數據源與處理策略
本文抗差實驗涉及到靜態和動態兩個部分,分別在小區廣場一側(gcyc)、“T”型路口(txlk)和橋邊(ylqb)處采集了靜態觀測數據。將接收機安置在手推車上,并在運動場上進行動態數據采集,數據處理中所需的精密數據均從IGS 數據中心下載。數據具體處理策略如表1 所示。
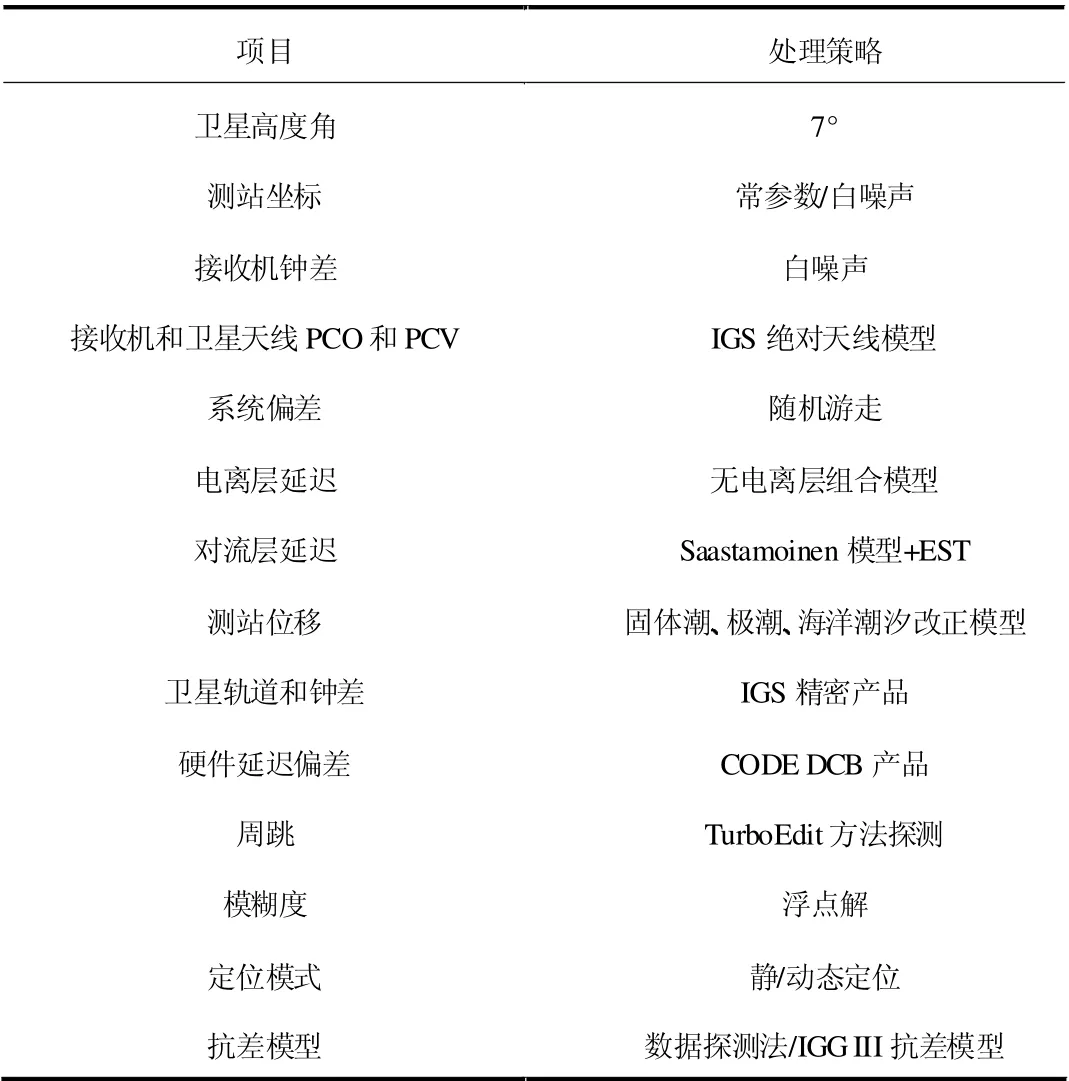
表1 算法策略
3 實驗結果分析
首先,利用gcyc、txlk 和ylqb 測站觀測數據分別在不抗差、數據探測法抗差和利用IGG III 模型抗差三種策略下進行GPS/BDS 組合靜態PPP 解算。以gcyc 測站定位結果為例,三種情況下的定位誤差如圖1 所示。
通過圖1 可明顯看出,當利用gcyc 測站觀測數據進行靜態PPP 時,若不考慮異常觀測值帶來的影響,定位精度受到嚴重影響;當利用數據探測法或IGG III 進行抗差時,定位精度均得到巨大提升。以0.15 m 為定位誤差收斂標準的閾值,將各測站的收斂時間與定位精度進行統計如表2 所示。
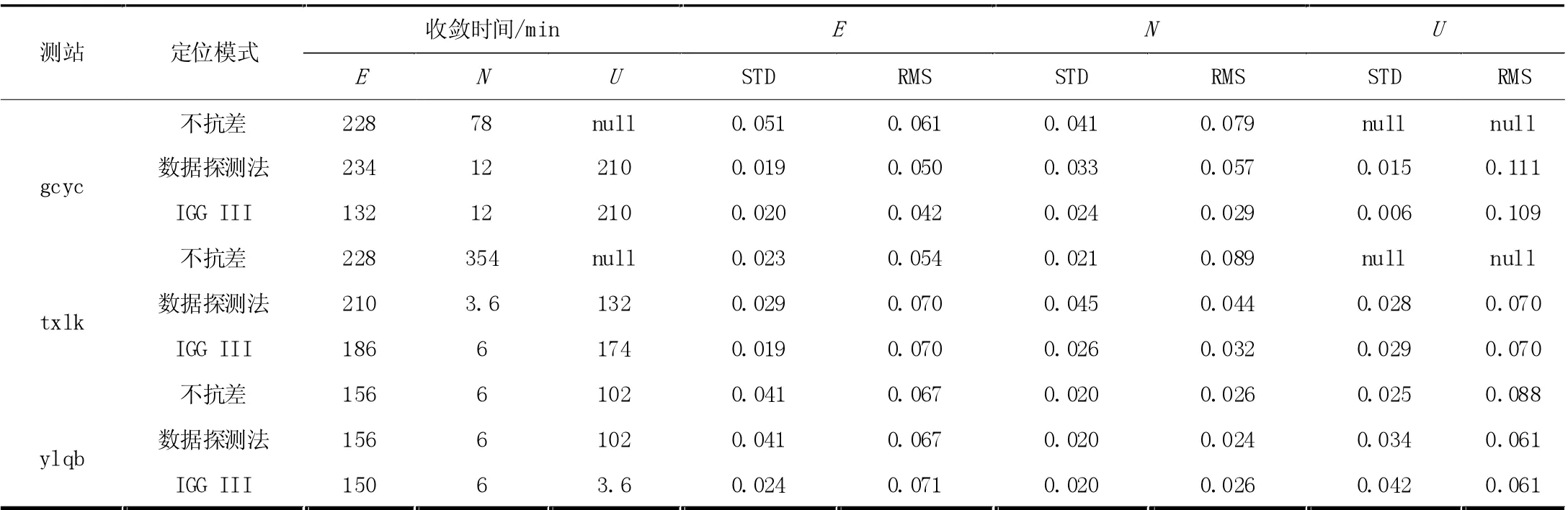
表2 不同抗差模式下定位誤差統計
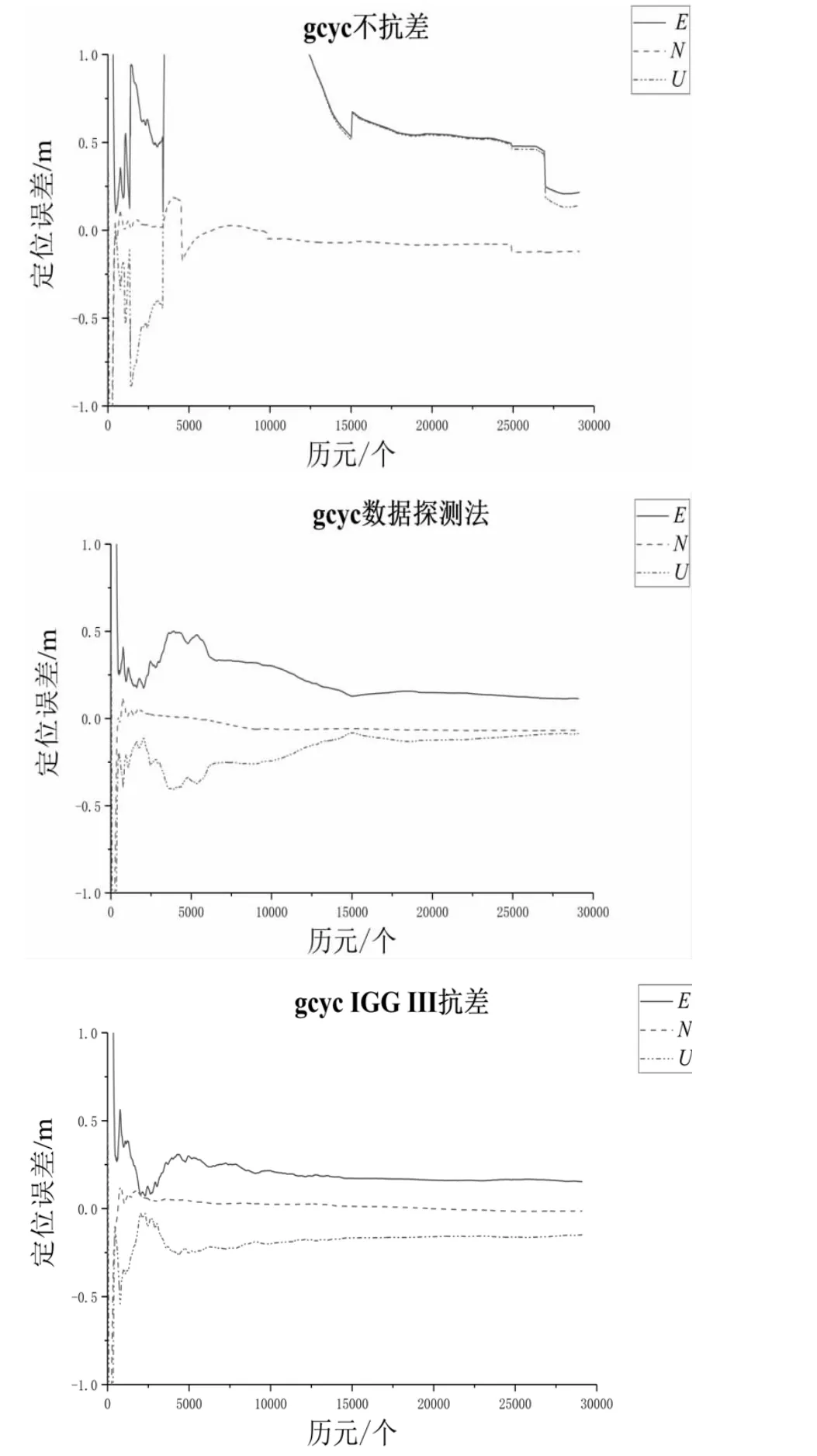
圖1 gcyc 測站不同抗差模式下定位誤差對比
就測站環境而言,三個測站當中gcyc 測站環境差,DOP 值為2.5,多路徑RMS 為0.31 m,從定位結果上更易展現出抗差策略差異。通過表1 對該測站在不同抗差模式下定位結果進行統計分析,發現gcyc 測站在IGG III 策略下E 方向收斂時間較數據探測法策略下縮短43.5%,N 與U 方向收斂時間基本一致;收斂后IGG III 策略下N 和U 方向定位誤差的STD 較數據探測法分別減小了27%和60%,E 方向定位精度基本一致;E 和N方向定位誤差的RMS 分別減小了16%和49.1%,U 方向基本保持一致。txlk 與ylqb 測站均在IGG III 抗差模式下收斂時間最短定位精度最高。綜上所述,在定位解算時必須考慮粗差對定位結果的影響,尤其是城市環境下實測數據。若不考慮異常觀測值帶來的影響將導致收斂時間較長,定位精度較差。數據探測法與IGG III 均能滿足導航定位中抗差需求,但IGG III 策略使得正常觀測值與異常觀測值均得到有效利用,該策略下收斂速度更快定位精度更高,與數據探測法相比IGG III 更適用于靜態PPP 解算。
為體現IGG III 在動態定位中的能力,現利用實測動態測站tcl1 的觀測數據進行GPS/BDS 組合動態PPP 實驗,將兩種方案下E、N 和U 方向定位誤差進行對應統計繪圖,結果如圖2 所示。
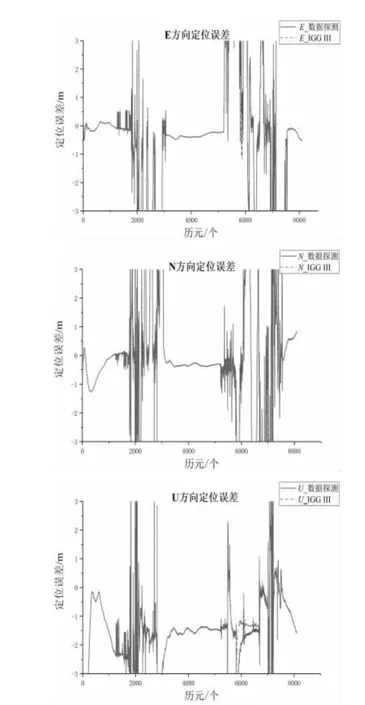
圖2 tcl1 測站不同抗差模式下動態定位結果
從圖2 中可以看出利用兩種抗差模型后,E 和N 方向上的定位誤差基本一致,經定位結果統計發現兩種策略下E 和N 方向定位誤差相差不足1%;U 方向定位精度在IGG III 策略下有所提升,U 方向定位誤差的STD 和RMS 分別減小了3.8%和2.2%。從圖2 中看出U 方向定位精度提升主要體現在6000 至7000 歷元之間,對該時段內可觀測到衛星數和殘差進行統計分析,發現該時段內可觀測到衛星數較少,平均每個歷元僅能觀測到7 顆衛星,且觀測數據質量不佳存在粗差,利用IGG III 策略抗差時對觀測質量不佳的衛星進行降權處理,而數據探測法對此類衛星直接剔除,致使可用衛星數更少,空間幾何構型更差。因此在IGG III 策略下定位精度得到提升。綜上所述,無論是靜態定位還是動態定位,數據探測法和IGG III 均能起到抗差提升定位精度的作用,且利用IGG III 后定位精度和收斂速度均高于數據探測法,主要在于IGG III 對異常觀測值的合理利用;同時證實了IGG III 在現代導航定位中應用較廣的原因。
4 結論
經過實驗發現,與數據探測法這種剔除含有粗差的衛星抗差策略相比,IGG III 抗差模型采用分段思想,其具有有界、分段、高效和連續的特性,無論是靜態定位還是動態定位,均表現出更高的應用價值。
猜你喜歡
中等數學(2022年2期)2022-06-05 07:10:50
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年1期)2021-01-21 03:22:38
小學生學習指導(低年級)(2020年6期)2020-07-25 02:31:36
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
小學生學習指導(低年級)(2018年9期)2018-09-26 05:59:44
瘋狂英語·新讀寫(2018年2期)2018-09-07 09:32:10
數學大世界(2018年1期)2018-04-12 05:39:14