兩類遙感圖像深度神經(jīng)網(wǎng)絡(luò)預(yù)測方法及比較
2021-12-12 12:08:30趙理君
無線電工程 2021年12期
關(guān)鍵詞:實驗
金 興,唐 娉,趙理君
(1.中國科學(xué)院空天信息創(chuàng)新研究院,北京 100094;2.中國科學(xué)院大學(xué) 電子電氣與通信工程學(xué)院,北京 100049)
0 引言
隨著遙感數(shù)據(jù)的快速增長,遙感圖像時間序列分析漸成趨勢,但因衛(wèi)星成像特點,高空間分辨率遙感圖像難以獲得不同區(qū)域時相間隔一致的遙感圖像序列,因此,如何用圖像處理的方法補全所需時相圖像,以便用統(tǒng)一的方法分析遙感圖像時間序列成為亟待解決的問題。
當(dāng)所需時相缺失時,2種思路最為直接,一種是將別的時相的數(shù)據(jù)直接轉(zhuǎn)換為所需時相,對應(yīng)的方法也被稱為色彩遷移的方法;另一種是用一組時相序列預(yù)測的方法。這2種思路各有優(yōu)缺點,色彩遷移方法需要的條件比較簡單,只需要2個時相的數(shù)據(jù)去學(xué)習(xí)映射的關(guān)系,但該方法假設(shè)了2個時相之間沒有地物發(fā)生變化,只有光譜的變化,這與實際情況不完全符合。而時序預(yù)測的方法則需要多個時相的數(shù)據(jù)才可執(zhí)行,但它可以對地物的變化進(jìn)行建模與預(yù)測,缺點是數(shù)據(jù)條件要求較高。
基于影像色彩遷移的典型方法是生成對抗網(wǎng)絡(luò)(GAN)中用于進(jìn)行影像雙向變換的CycleGAN,它是一種無監(jiān)督學(xué)習(xí)的生成對抗網(wǎng)絡(luò)方法,該網(wǎng)絡(luò)中通過計算變換后影像(源域A到目標(biāo)域B的變換)與重建影像(目標(biāo)域B到源域A的變換)的循環(huán)一致性損失來約束影像的變換[1]。該方法主要用于2個不同時相影像的變換,如文物圖像的修復(fù)與保護[2]、不同時段、季節(jié)、光照條件下拍攝照片的藝術(shù)風(fēng)格轉(zhuǎn)換[3]、地物信息提取[4]以及室內(nèi)火焰圖像場景的遷移[5]。
基于時相序列進(jìn)行遙感影像預(yù)測的典型方法是循環(huán)神經(jīng)網(wǎng)絡(luò)(RNN)中用于處理時序影像數(shù)據(jù)的ConvLSTM,該方法通過其過去狀態(tài)和當(dāng)前的輸入狀態(tài)來確定網(wǎng)格中某個單元的未來狀態(tài)。在輸入到狀態(tài)和狀態(tài)到狀態(tài)轉(zhuǎn)換中使用卷積運算符來輕松實現(xiàn)。該方法主要用于時間序列預(yù)測,如歸一化植被指數(shù)(NDVI)預(yù)測[6]和雷達(dá)回波圖像的短期降雨預(yù)測[7]。
本文以影像色彩遷移及時序預(yù)測的角度為出發(fā)點,使用CycleGAN及ConvLSTM網(wǎng)絡(luò)對遙感影像進(jìn)行預(yù)測,通過比較CycleGAN及ConvLSTM網(wǎng)絡(luò)預(yù)測結(jié)果并分析網(wǎng)絡(luò)適用性,為補全衛(wèi)星遙感觀測所需時相的數(shù)據(jù)尋找一種合適的技術(shù)途徑。本文實驗表明,2種網(wǎng)絡(luò)產(chǎn)生的預(yù)測結(jié)果與參考影像能夠保持一致的空間及光譜特征。2種網(wǎng)絡(luò)預(yù)測結(jié)果的結(jié)構(gòu)相似度(SSIM)均達(dá)到0.99,均方根誤差(RMSE)分別小于4個像素和2個像素。
本文的主要創(chuàng)新點如下:① 以2種不同的角度(色彩遷移、時序預(yù)測)為出發(fā)點,將CycleGAN及ConvLSTM網(wǎng)絡(luò)首次應(yīng)用到遙感影像預(yù)測領(lǐng)域;② 在不同區(qū)域無人機(UAV)數(shù)據(jù)集上對比了CycleGAN與ConvLSTM網(wǎng)絡(luò)預(yù)測的結(jié)果,2種網(wǎng)絡(luò)的預(yù)測結(jié)果都能與相應(yīng)的參考影像保持較好的空間及光譜特征;③ 提供了一種新的彌補遙感衛(wèi)星觀測數(shù)據(jù)缺失的技術(shù)途徑。CycleGAN網(wǎng)絡(luò)受單時序影像缺失的程度較小,適用于時序影像缺失程度較大時的遙感影像預(yù)測。ConvLSTM網(wǎng)絡(luò)能夠利用多個時序影像的狀態(tài)信息,但受單時序影像缺失程度較大,適用于時序影像缺失程度較小時的遙感影像預(yù)測。
1 CycleGAN及ConvLSTM網(wǎng)絡(luò)簡介
1.1 CycleGAN網(wǎng)絡(luò)
CycleGAN的目的是實現(xiàn)源域A(影像X)和目標(biāo)域B(影像Y)之間的相互轉(zhuǎn)換[8]。CycleGAN包含2個生成器G和F、2個對應(yīng)的對抗判別器DY和DX及2個循環(huán)一致?lián)p失(前向循環(huán)一致?lián)p失及反向循環(huán)一致?lián)p失)。


(a) CycleGAN的映射
根據(jù)CycleGAN結(jié)構(gòu)示意圖,CycleGAN網(wǎng)絡(luò)包含前向?qū)鼓繕?biāo)、反向?qū)鼓繕?biāo)和循環(huán)一致性損失3部分。前向?qū)鼓繕?biāo)及反向?qū)鼓繕?biāo)如式(1)和式(2)所示,循環(huán)一致性損失如式(3)所示,CycleGAN目標(biāo)函數(shù)如式(4)所示:
LGAN(G,DY,X,Y)=EY~Pdata(Y)[lbDY(Y)]+
EX~Pdata(X)[lb(1-DY(G(X)))],
(1)
LGAN(F,DX,Y,X)=EX~Pdata(X)[lbDX(X)]+
EY~Pdata(Y)[lb(1-DX(F(Y)))],
(2)
(3)
LGAN(F,DX,Y,X))},
(4)
式中,X為源域A真實影像數(shù)據(jù);Y為目標(biāo)域B真實影像數(shù)據(jù);~表示服從關(guān)系;Pdata(Y)和Pdata(X)分別為目標(biāo)域影像及源域影像數(shù)據(jù)的分布;G(X)和F(Y)為預(yù)測后影像;E表示數(shù)學(xué)期望函數(shù);μ1及μ2分別表示循環(huán)一致?lián)p失及對抗目標(biāo)比例超參數(shù)。
此網(wǎng)絡(luò)目的如下:① 學(xué)習(xí)生成器G從源域A(影像X)到目標(biāo)域B(影像Y)的映射關(guān)系(G:A→B);② 學(xué)習(xí)生成器F從目標(biāo)域B(影像Y)到源域A(影像X)的映射關(guān)系(F:B→A)。
1.2 LSTM及ConvLSTM網(wǎng)絡(luò)
長短時記憶網(wǎng)絡(luò)(LSTM)屬于循環(huán)神經(jīng)網(wǎng)絡(luò)(RNN),主要作用是能夠利用影像的時序信息進(jìn)行預(yù)測的一種方法[9-10]。其主要創(chuàng)新是細(xì)胞狀態(tài)ct(網(wǎng)絡(luò)信息傳送帶)充當(dāng)狀態(tài)信息的累加器,并通過幾個自參數(shù)化控制門訪問、寫入和清除單元。每當(dāng)有新輸入xt時,如果輸入門it(決定ct需要添加哪些信息)it被激活,它的信息將被累積到單元格。此外,如果忘記門ft(決定ct需要丟棄哪些信息)打開,則在此過程中可能“遺忘”過去的細(xì)胞狀態(tài)ct-1ct-1。輸出門ot(判斷ct輸出哪些狀態(tài)特征)控制最新的細(xì)胞狀態(tài)ct是否傳播到最終隱狀態(tài)ht(最終輸出的狀態(tài)特征),其結(jié)構(gòu)如圖2所示,忘記門ft、輸入門itit、輸出門ot、細(xì)胞狀態(tài)ct及最終隱狀態(tài)ht為:
ft=σ(Wf·[xt,ht-1]+bf),
(5)
it=σ(Wi·[xt,ht-1]+bi),
(6)
ot=σ(Wo·[xt,ht-1]+bo),
(7)
ct=ft*ct-1+it*tanh(Wc·[xt,ht-1]+bc),
(8)
ht=ot*tanh(ct),
(9)
式中,ct-1和ht-1表示過去的細(xì)胞狀態(tài)及最終隱狀態(tài);Wf和bf表示忘記門的權(quán)重及偏向;Wi和bi表示輸入門的權(quán)重及偏向;Wo及bo表示輸出門的權(quán)重及偏向;Wc和bc表示細(xì)胞狀態(tài)的權(quán)重及偏向;σ表示sigmoid激活函數(shù)。

圖2 長短時記憶網(wǎng)絡(luò)結(jié)構(gòu)圖Fig.2 Structure diagram of LSTM
ConvLSTM的一個顯著特點是所有輸入狀態(tài)x1-xt,細(xì)胞狀態(tài)c1-ct,隱狀態(tài)h1-ht為3D張量,其最后2個維度是空間維度(行和列)[11-12]。為了更好地了解輸入和狀態(tài),可以將它們想象為站在空間網(wǎng)格上的向量。ConvLSTM通過其過去狀態(tài)和當(dāng)前輸入狀態(tài)來確定網(wǎng)格中某個單元的未來狀態(tài)。這可以通過在狀態(tài)到狀態(tài)和輸入到狀態(tài)轉(zhuǎn)換中使用卷積運算符來輕松實現(xiàn)[13]。該網(wǎng)絡(luò)目的是學(xué)習(xí)不同狀態(tài)信息層下時序影像之間的映射關(guān)系。其結(jié)構(gòu)示意圖如圖3所示。
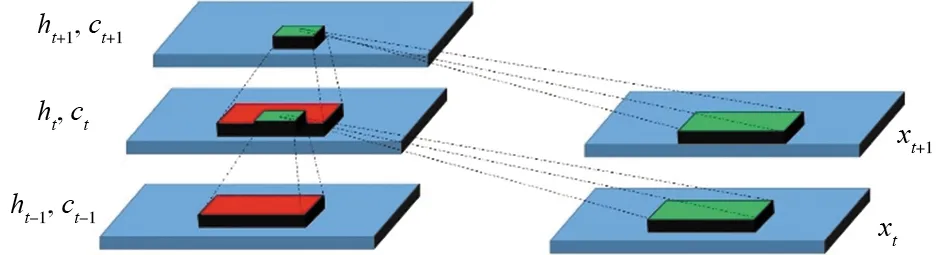
圖3 卷積長短時記憶網(wǎng)絡(luò)結(jié)構(gòu)示意Fig.3 Structure diagram of ConvLSTM
1.3 影像質(zhì)量評價方法
1.3.1 均方根誤差
RMSE是一種基于像素點的統(tǒng)計方法[14],表示預(yù)測后影像與參考影像之間的像元誤差,單位是pixel。在影像質(zhì)量評價中,反映了預(yù)測后影像與參考影像之間像元的接近程度,值越小表明像元的接近程度越好,即:
(10)
式中,X(I,J)為預(yù)測后影像;Y(I,J)為參考影像,I,J表示影像像素行列的位置;M,N分別表示影像的寬度和高度。
1.3.2 結(jié)構(gòu)相似度
Wang等人提出了SSIM評價方法。認(rèn)為客觀評價方法不能依賴于像素點間的簡單統(tǒng)計,而應(yīng)基于人類視覺特點來進(jìn)行研究[15]。在影像質(zhì)量評價中,用于衡量處理影像前后的相似度,值越大表明影像相似度越高。
SSIM由亮度信息L(X,Y)、對比度信息C(X,Y)和結(jié)構(gòu)退化信息S(X,Y)組成。其中,X(I,J),Y(I,J)分別表示預(yù)測后影像和參考影像。為了增加結(jié)構(gòu)相似度計算結(jié)果的穩(wěn)定性,同時避免分式中分子或分母為零的情況,對亮度信息L(X,Y)、對比度信息C(X,Y)和結(jié)構(gòu)退化信息S(X,Y)的公式增添參數(shù)C1,C2和C3,即:
(11)
(12)
(13)
SSIM(X,Y)=[L(X,Y)]α[C(X,Y)]β[S(X,Y)]γ,
(14)
式中,μX,σX分別為預(yù)測后影像X(I,J)的均值及標(biāo)準(zhǔn)差;μY,σY分別為參考影像Y(I,J)的均值及標(biāo)準(zhǔn)差;σXY為預(yù)測后影像X(I,J)與參考影像Y(I,J)之間的相關(guān)系數(shù);α,β和γ控制L(X,Y),C(X,Y)和S(X,Y)的重要程度,取值為α=β=γ=1。C1,C2及C3取值為C1=(0.01L)2,C2=(0.03L)2,C3=(0.03L)2/2,L為影像像素的最大值,L=255。
2 實驗數(shù)據(jù)與結(jié)果分析
2.1 實驗數(shù)據(jù)說明
實驗數(shù)據(jù)采用無人機(UAV)影像,無人機影像位置如圖4所示。

圖4 無人機影像的位置(1,2,4波段合成)Fig.4 Location of UAV image (1,2 and 4 band composition)
無人機影像位于圣米歇爾山上游的庫斯農(nóng)河平原(法國西部,北緯48.52°,西經(jīng)1.53°)。庫斯農(nóng)河平原是一片面積達(dá)1.74 km2的水淹大草原[16]。影像投影類型為蘭伯特投影,影像空間分辨率為0.02 m,影像波段數(shù)4個(綠色、紅色、紅邊和近紅外),影像尺寸為3 072 pixel×5 632 pixel。
2.2 實驗訓(xùn)練與測試策略
2.2.1 CycleGAN網(wǎng)絡(luò)訓(xùn)練與測試
實驗主要分為3組,每組實驗包含二景訓(xùn)練影像和一景測試影像,實驗?zāi)康氖球炞C不同月份下CycleGAN網(wǎng)絡(luò)的有效性及在相鄰月份影像上的泛化能力。通過一對訓(xùn)練樣本訓(xùn)練色彩轉(zhuǎn)換模型,然后用到一景測試樣本上。第1組進(jìn)行2019年4—6月的色彩遷移模型實驗,第2組進(jìn)行2019年4—7月的色彩遷移模型實驗,第3組進(jìn)行2019年4—8月的色彩遷移模型實驗。3組實驗影像的名稱及日期如表1所示。3組實驗影像的視覺效果如圖5所示。

(a) 第一組實驗訓(xùn)練及測試對象
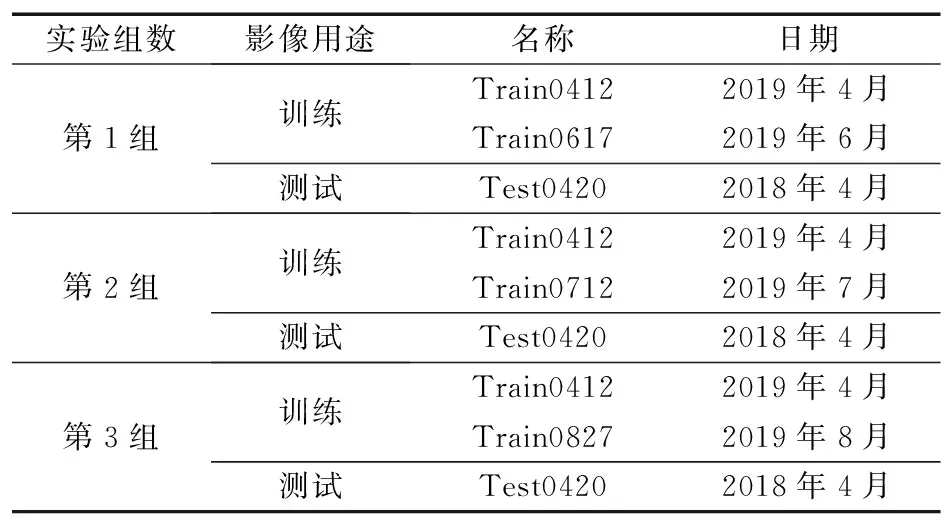
表1 CycleGAN實驗影像的名稱和日期
2.2.2 ConvLSTM網(wǎng)絡(luò)訓(xùn)練與測試
ConvLSTM網(wǎng)絡(luò)主要分為單元組預(yù)測和多元組預(yù)測2種方式。
單元組預(yù)測實驗同CycleGAN網(wǎng)絡(luò)訓(xùn)練與測試。多元組預(yù)測實驗主要分為3組,每組實驗包含一組訓(xùn)練影像和一組測試影像。第1組進(jìn)行2019年6月影像預(yù)測實驗,第2組進(jìn)行2019年7月影像預(yù)測實驗,第3組進(jìn)行2019年8月影像預(yù)測實驗。3組實驗的目的是驗證不同月份下ConvLSTM網(wǎng)絡(luò)的有效性及在相鄰月份影像上的泛化能力。3組實驗影像的名稱及日期如表2所示。3組實驗影像的視覺效果如圖6所示。

表2 ConvLSTM在多元組預(yù)測方式下實驗影像的 名稱和日期
2.3 實驗細(xì)節(jié)描述
2.3.1 影像分塊
由于影像尺寸的限制,輸入整景影像(影像尺寸為3 072 pixel×5 632 pixel)將導(dǎo)致計算內(nèi)存不足。為了解決這個問題,在實驗訓(xùn)練及測試過程中需要對影像進(jìn)行分塊處理,本文中訓(xùn)練影像及測試影像被劃分為264個塊(影像塊的尺寸為256 pixel×256 pixel),這樣可以覆蓋整景影像信息并減輕內(nèi)存壓力。
2.3.2 超參數(shù)選擇
利用深度學(xué)習(xí)框架(Tensorflow)運行CycleGAN及ConvLSTM網(wǎng)絡(luò)。為了提高網(wǎng)絡(luò)計算效率,網(wǎng)絡(luò)中的每層均在通用計算架構(gòu)(CUDA)下運行[17]。在CycleGAN網(wǎng)絡(luò)中,循環(huán)一致?lián)p失比例超參數(shù)μ1=350,對抗目標(biāo)損失比例超參數(shù)μ2=1/32,網(wǎng)絡(luò)優(yōu)化器使用Adam,學(xué)習(xí)率設(shè)置為1e-4,網(wǎng)絡(luò)循環(huán)次數(shù)(epoch)設(shè)置為200。在ConvLSTM網(wǎng)絡(luò)中,網(wǎng)絡(luò)使用3層堆疊的ConvLSTM卷積層,損失函數(shù)使用均方誤差,網(wǎng)絡(luò)優(yōu)化器使用RMSProp,學(xué)習(xí)率設(shè)置為10-3,網(wǎng)絡(luò)循環(huán)次數(shù)(epoch)設(shè)置為100。
2.4 實驗結(jié)果主觀評價
通過對影像進(jìn)行分塊及GPU上的加速[18-19],本文合理設(shè)置CycleGAN及ConvLSTM網(wǎng)絡(luò)訓(xùn)練超參數(shù),并在不同月份及循環(huán)次數(shù)下進(jìn)行了3組實驗。
為了驗證CycleGAN及ConvLSTM網(wǎng)絡(luò)在影像預(yù)測中的有效性及相鄰序列月份影像上的泛化能力。94%的訓(xùn)練樣本塊(250塊)用于網(wǎng)絡(luò)模型的訓(xùn)練,6%的訓(xùn)練樣本塊(14塊)用于網(wǎng)絡(luò)模型的驗證,相鄰序列中的同月影像用于網(wǎng)絡(luò)模型的測試。最終不同月份及循環(huán)次數(shù)下的CycleGAN及ConvLSTM網(wǎng)絡(luò)驗證結(jié)果及測試結(jié)果如圖7和圖8所示。

(a) 6月生成結(jié)果,epoch=100 (b) 7月生成結(jié)果,epoch=100 (c) 8月生成結(jié)果,epoch=100

(a) 6月生成結(jié)果,epoch=100 (b) 7月生成結(jié)果,epoch=100 (c) 8月生成結(jié)果,epoch=100
從圖7可以看出,CycleGAN網(wǎng)絡(luò)在不同月份及循環(huán)次數(shù)下的驗證結(jié)果與相應(yīng)的參考影像之間存在細(xì)微的邊緣分塊效應(yīng)(紅色線框),ConvLSTM網(wǎng)絡(luò)在不同月份及循環(huán)次數(shù)下的驗證結(jié)果與相應(yīng)的參考影像之間能夠保持較好的空間及光譜特征(綠色線框)。從圖8可以看出,CycleGAN及ConvLSTM網(wǎng)絡(luò)在不同月份及循環(huán)次數(shù)下的測試結(jié)果與相應(yīng)的參考影像之間能夠保持較好的空間及光譜特征。
2.5 實驗結(jié)果客觀評價
CycleGAN及ConvLSTM網(wǎng)絡(luò)預(yù)測結(jié)果的定量評價基于以下3個方面:① 像素誤差圖評價;② 定量指標(biāo)表評價;③ 不同點位光譜曲線評價。
2.5.1 像素誤差圖評價
像素誤差圖主要衡量預(yù)測結(jié)果與參考影像之間的像素點在整體上的視覺接近程度。通過計算預(yù)測結(jié)果與參考影像的差值影像,在差值影像上以不同顏色體現(xiàn)像素點不同水平的誤差。最終不同月份及循環(huán)次數(shù)下的CycleGAN及ConvLSTM網(wǎng)絡(luò)驗證結(jié)果及測試結(jié)果像素誤差圖如圖9和圖10所示。

(a) 6月像素誤差圖,epoch=100 (b) 7月生成結(jié)果,epoch=100 (c) 8月生成結(jié)果,epoch=100

(a) 6月像素誤差圖,epoch=100 (b) 7月生成結(jié)果,epoch=100 (c) 8月生成結(jié)果,epoch=100
從圖9和圖10可以看出,CycleGAN網(wǎng)絡(luò)在不同月份及循環(huán)次數(shù)下的網(wǎng)絡(luò)生成結(jié)果與相應(yīng)的參考影像的像素誤差圖的整體像素誤差范圍為1~5個像素;ConvLSTM網(wǎng)絡(luò)在不同月份及循環(huán)次數(shù)下的網(wǎng)絡(luò)生成結(jié)果與相應(yīng)的參考影像的像素誤差圖的整體像素誤差范圍為1~3個像素。
2.5.2 定量指標(biāo)表
下面比較不同月份及循環(huán)次數(shù)下CycleGAN及ConvLSTM網(wǎng)絡(luò)驗證結(jié)果及測試結(jié)果的定量指標(biāo)。最終CycleGAN及ConvLSTM網(wǎng)絡(luò)驗證結(jié)果及測試結(jié)果的定量指標(biāo)如表3和表4所示。
從表3和表4可以看出,CycleGAN網(wǎng)絡(luò)在不同月份及循環(huán)次數(shù)為200次時的網(wǎng)絡(luò)生成結(jié)果與相應(yīng)的參考影像之間的RMSE達(dá)到1~4個像素,SSIM達(dá)到99.5%;ConvLSTM網(wǎng)絡(luò)在不同月份及循環(huán)次數(shù)為100次時的網(wǎng)絡(luò)生成結(jié)果與相應(yīng)的參考影像之間的RMSE達(dá)到1~2個像素,SSIM達(dá)到99.9%。
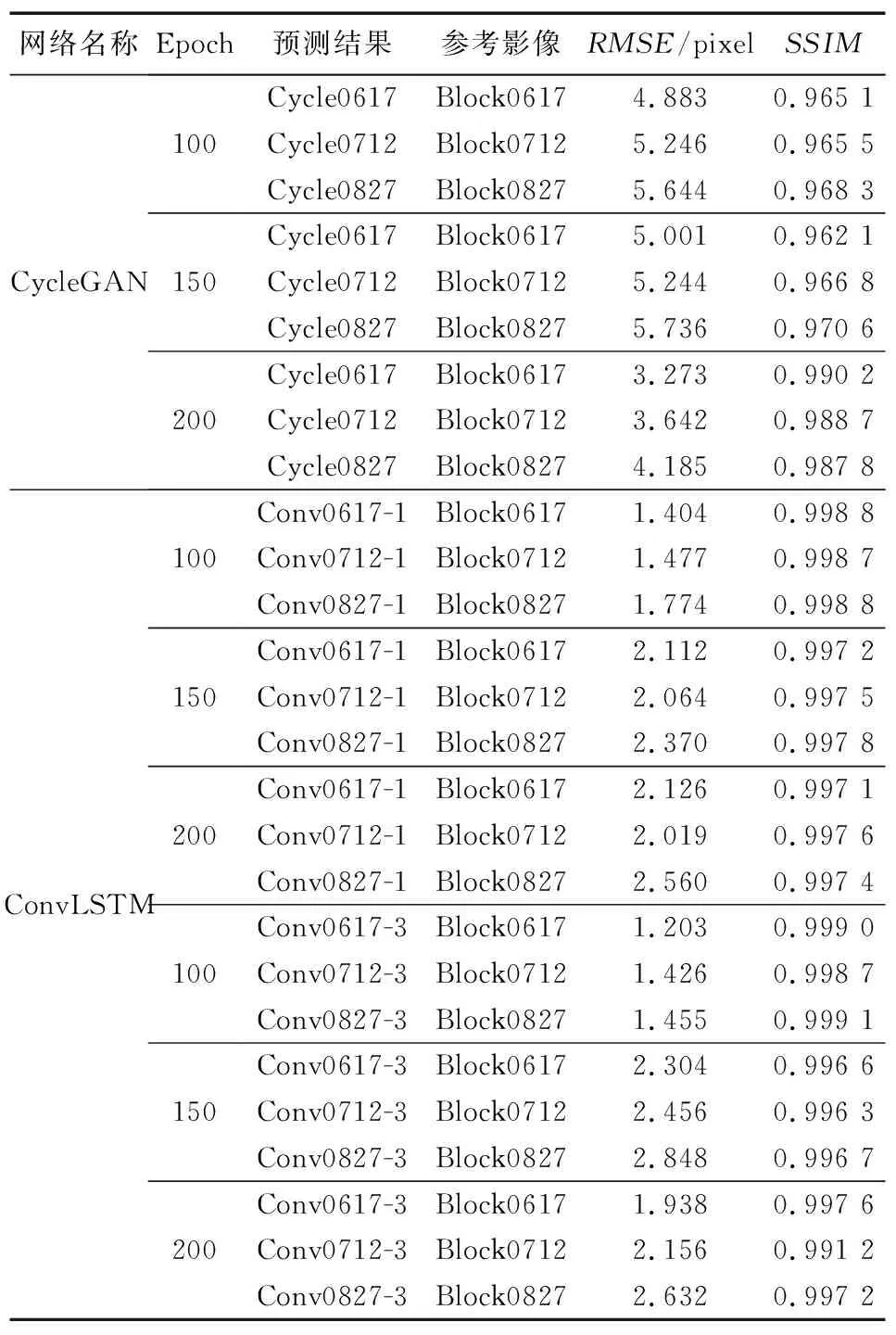
表3 CycleGAN及ConvLSTM網(wǎng)絡(luò)驗證結(jié)果的評價指標(biāo)

表4 CycleGAN及ConvLSTM網(wǎng)絡(luò)測試結(jié)果的評價指標(biāo)
2.5.3 不同點位光譜曲線評價
下面比較2類網(wǎng)絡(luò)在不同月份及最優(yōu)的網(wǎng)絡(luò)循環(huán)次數(shù)(CycleGAN:epoch=200,ConvLSTM:epoch=100)下的網(wǎng)絡(luò)預(yù)測結(jié)果(CycleGAN:綠線,ConvLSTM:藍(lán)線)與參考影像(紅線)在植被點(1 713,666)、溝渠點(821,4 212)及湖泊點(2 106,4 387)的光譜特征。最終CycleGAN及ConvLSTM網(wǎng)絡(luò)測試結(jié)果的點位光譜曲線如圖11~圖13所示。
不同點位的光譜曲線說明,CycleGAN及ConvLSTM網(wǎng)絡(luò)預(yù)測結(jié)果能夠與參考影像之間保持較好的空間及光譜特征。2種網(wǎng)絡(luò)預(yù)測結(jié)果的RMSE分別小于4個像素和2個像素,2種網(wǎng)絡(luò)預(yù)測結(jié)果的SSIM均達(dá)到0.99。ConvLSTM網(wǎng)絡(luò)的整體性能優(yōu)于CycleGAN網(wǎng)絡(luò),原因為ConvLSTM利用多個時序影像的狀態(tài)信息。

圖11 CycleGAN及ConvLSTM網(wǎng)絡(luò)測試結(jié)果在 6月份的點位光譜曲線Fig.11 Point spectral curves of testing result in June of CycleGAN and ConvLSTM

圖12 CycleGAN及ConvLSTM網(wǎng)絡(luò)測試結(jié)果在 7月份的點位光譜曲線Fig.12 Point spectral curves of testing result in July of CycleGAN and ConvLSTM

圖13 CycleGAN及ConvLSTM網(wǎng)絡(luò)測試結(jié)果在 8月份的點位光譜曲線Fig.13 Point spectral curves of testing result in August of CycleGAN and ConvLSTM
3 結(jié)束語
采用CycleGAN色彩遷移方法及ConvLSTM網(wǎng)絡(luò)遙感影像預(yù)測方法對生成所需時相的遙感圖像能力進(jìn)行了實驗和驗證,得出結(jié)論如下:
① CycleGAN網(wǎng)絡(luò)的色彩遷移結(jié)果在視覺上與參考影像之間保持了較好的空間及光譜特征,局部存在細(xì)微邊緣分塊效應(yīng);ConvLSTM網(wǎng)絡(luò)的預(yù)測結(jié)果在視覺上與參考影像之間保持較好的空間及光譜特征。
② CycleGAN網(wǎng)絡(luò)可實現(xiàn)兩景影像之間的雙向自由轉(zhuǎn)換,該網(wǎng)絡(luò)受時序影像缺失的影響程度較小;ConvLSTM網(wǎng)絡(luò)在預(yù)測時考慮了時序影像的狀態(tài)信息,該網(wǎng)絡(luò)受時序影像缺失的影響程度較大。
基于本文實驗結(jié)果,在進(jìn)行所需時相遙感影像預(yù)測時,需要根據(jù)時序影像缺失的程度進(jìn)行不同網(wǎng)絡(luò)的選擇。當(dāng)時序影像缺失程度大時,可選擇CycleGAN網(wǎng)絡(luò)進(jìn)行色彩轉(zhuǎn)換獲得所需時相影像;當(dāng)時序影像缺失程度小時,可選擇ConvLSTM網(wǎng)絡(luò)進(jìn)行影像預(yù)測。當(dāng)然,根據(jù)時序影像缺失的程度進(jìn)行網(wǎng)絡(luò)的選擇并不是遙感影像預(yù)測唯一考慮的因素。因此,在未來的工作中對影響CycleGAN及ConvLSTM網(wǎng)絡(luò)預(yù)測的因素做進(jìn)一步的研究和分析。
猜你喜歡
作文·小學(xué)低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學(xué)生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學(xué)低年級(2024年2期)2024-04-29 00:00:00
作文·小學(xué)低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55