基于浮動車軌跡的城市出行分析與流量預測
2021-12-11 03:44:56程添亮
黑龍江交通科技 2021年11期
關鍵詞:模型
周 昀,丁 峰,程添亮
(1.江蘇自動化研究所,江蘇 連云港 222006;2.日照市公安局交通警察支隊,山東 日照 276826)
1 引 言
智能交通系統是解決現代城市交通問題的主要方法。浮動車技術是基于GPS、GIS的獲取道路交通信息的一種新型技術,相較于其他信息采集方法,浮動車技術采集路況信息更經濟、覆蓋范圍廣、受天氣影響較小。出租車作為城市出行中最為活躍的交通工具,其行駛軌跡密度與城市人口居住密度存在較強的關聯關系。通過對交通信息的定性和定量分析,能夠為各種各樣的交通應用提供服務。根據出租車途徑路口起訖點的分布特征,我們可以刻畫市民出行畫像;通過預測城市特征路口過車量,能夠為交通決策提供重要的參考意見。以數據為驅動的智能交通分析需要準確的行車軌跡數據和精準的地圖匹配數據作為支撐,本文中軌跡數據依賴于車載GPS,地圖數據依賴于高德地圖。由于數據的可獲取性,在已取得的成果上,本次研究提出點到點匹配與車輛行駛軌跡相結合的地圖匹配方法,使用更少的地圖信息,達到更精確的地圖匹配。
1 文獻綜述
根據數據來源、數據形式、分析需求的不同,目前基于軌跡的地圖匹配算法主要有幾何匹配算法、拓撲關系算法、概率統計算法和先進匹配算法。在本文中則根據實際情況,我們選擇了幾何算法和拓撲關系算法相結合的算法。城市交通起訖點分析是監測與管理城市交通運行情況的重要一環,掌握城市交通需求方便我們采取合理的交通管控、規劃方案。早先起訖點研究中的檢測數據主要來自地磁、線圈等定點檢測數據,Bell等、Perrakis等提出了一種基于貝葉斯估計的OD矩陣估計,結果表明模型估計和實際數據吻合度較高。曹喻旻等在車輛軌跡和定點檢測器數據的基礎上,提出了一種可以保證OD矩陣可靠性、計算路段流量與路段行程估計的OD估計模型。
路網交通流預測則從短時交通流的角度,對城市路況進行分析。張良力(2015)等使用ARMA模型對交叉口車輛的碰撞風險進行了評估,根據車輛進入交叉口前的速度,預測車輛進入交叉口后的速度,作為判斷交叉口內車輛發生碰撞的風險依據,基于ARMA模型的預測結果能夠實現車速較高精度的預測。胡浩(2019)等基于ARMA和BP神經網絡的組合模型,對城市路網中的特征路口交通流進行了預測,并驗證了預測效果的可行性和有效性。趙曉靜(2017)等針對短時交通流的突發性、時變性和非線性等特點,基于序列分解的思想,對信號期望數據建立ARMA模型,對噪聲數據進行維納濾波處理再建立預測模型,通過組合模型實現預測結果的優化。
2 算法與模型
本文數據主體為浮動車軌跡數據和地圖數據。浮動車軌跡數據來自2020年日照市五月980輛出租車GPS軌跡數據,包括軌跡點的經緯度、時間戳、瞬時速度、行車方向等信息;地圖數據取自高德地圖,包括路口、道路等地理位置。基于以上數據我們運用地圖匹配算法刻畫出租車的行駛軌跡,為分析城市通行分布與關鍵路口車流量預測提供數據支持。
2.1 數據準備
由于受到設備硬件和信號傳播途徑的限制,我們需要對收集到的數據先進行數據清洗和坐標系轉換,具體步驟如下。
(1)刪除重復、時間錯亂、缺失、漂移等軌跡數據,其中20 s內的缺失數據用均值法進行插補。
(2)坐標轉換;將浮動車GPS裝置的WGS-84(World Geodetic System-84)坐標轉換成GCJ-02坐標系(火星坐標系)。
(3)軌跡劃分;出租車在行駛過程中,會出現換班、休息等情況,導致行車軌跡出現間隔。在起訖點問題的分析中,完整的行車軌跡是關注重點,故需要將時間間隔大、沒有關聯關系的軌跡進行劃分,如果軌跡數據間隔超過8 h,我們認為兩段軌跡不相關。
2.2 起訖點算法
算法主要功能:統計出租車每天在不同路段的通行情況。
在起訖點算法中,首先要將軌跡點與地圖信息關聯,對高架、快速路、復雜路口等情況,除了使用點到點地圖匹配法,還要考慮歷史軌跡,多條件約束下,保證路口地圖匹配地準確性。其次,統計出租車起訖點通行量信息,根據統計數據分析日照市居民出行在時間和空間上的分布。考慮到出租車在城市交通中的特殊地位,其行車軌跡可用于刻畫城市客流分布信息和波動規律,為進一步提高城市公共交通服務水平、增強城市公共交通智能化管理提供了一種發展方向。
算法設計過程:
(1)用點到點地圖匹配算法初步獲取出租測經過路口的信息;
(2)用點到線地圖匹配算法和軌跡點的行駛方向、與路口相對方向對第一步得到的路口信息進行檢查,進一步保證時間上相鄰的軌跡點在空間上也相鄰,得到最終的路口信息;
(3)針對第二步得到的結果,篩選出與路口最近軌跡點對應的地圖信息,按照時間順序確定車輛途徑路口的軌跡;
(4)統計每輛車每條軌跡中途徑路口的路段信息,將所有路口按照時間順序兩兩匹配,得到起訖點路徑對,其中算法只記錄起點和終點不同的路徑對。
起訖點算法流程如圖1所示。
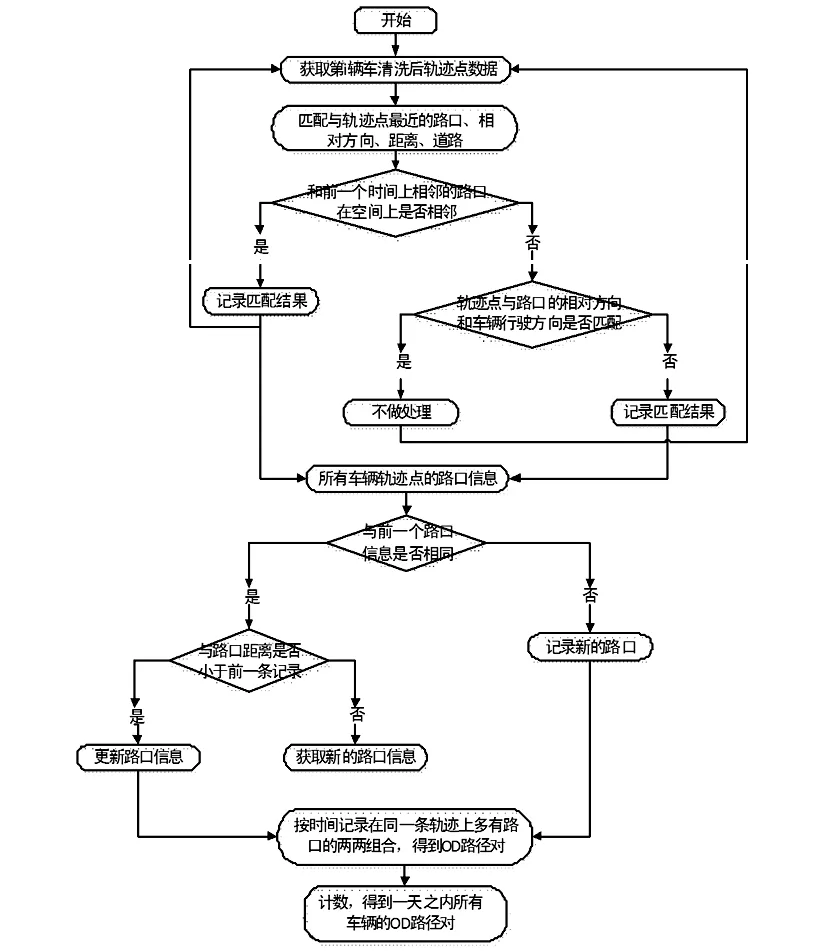
圖1 起訖點算法流程圖
2.3 統計學模型
本文使用統計學中的K-Means聚類和ARIMA模型對日照市出租車行駛軌跡分布以及關鍵路口車流量預測進行分析,K-Means是經典的快速聚類法,ARIMA模型是傳統的時間序列分析方法。
交通流預測一直受到廣泛的關注,基于預測可以有效地了解未來時段的交通流狀態。本文通過分析特征路口車流量時間序列的內部結構特征,可推演出該路口出租車的行駛規律,最終實現路口過車輛的預測。常用的時間序列模型有ARMA(Auto-Regressive Moving Average Model,自回歸移動平均模型), ARIMA(Autoregressive Integrated Moving Average model,求和自回歸移動平均模型)是ARMA的擴展,適用于分析非平穩時間序列,其表達式為
Φ(B)xt=Θ(B)εt
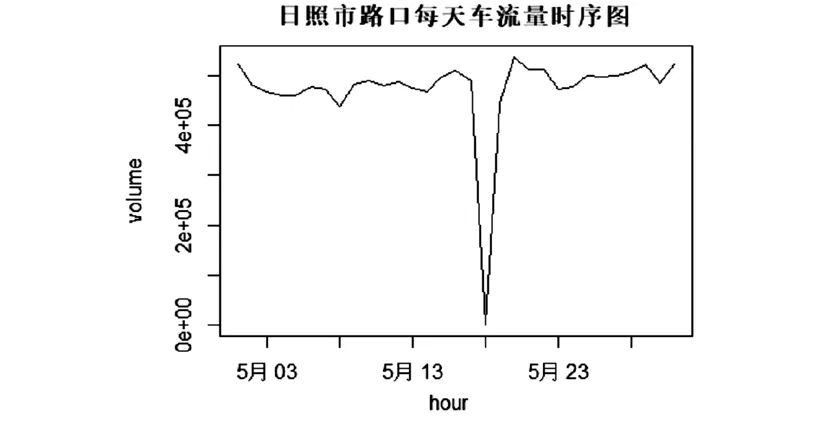
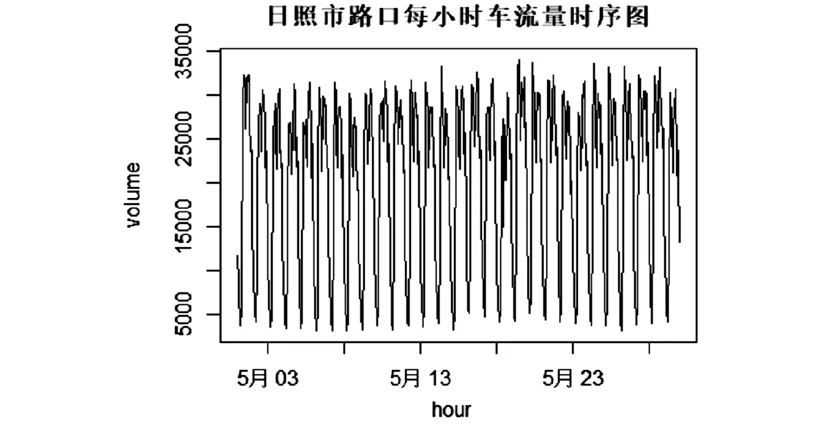
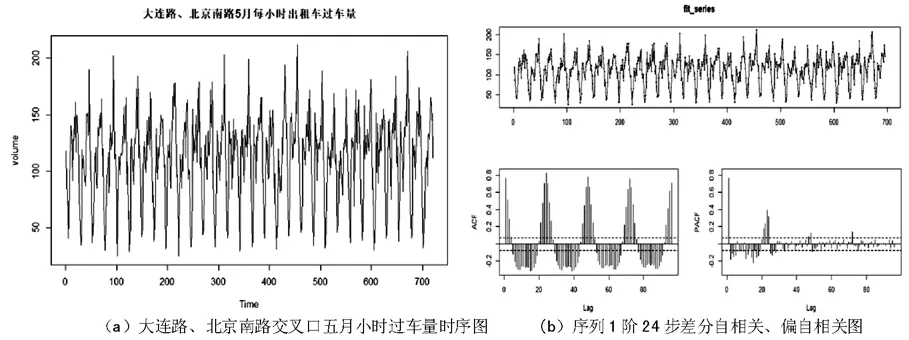
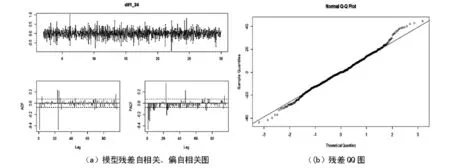
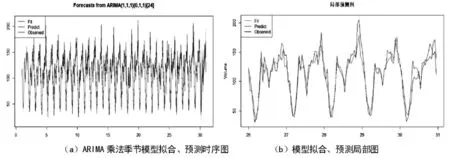
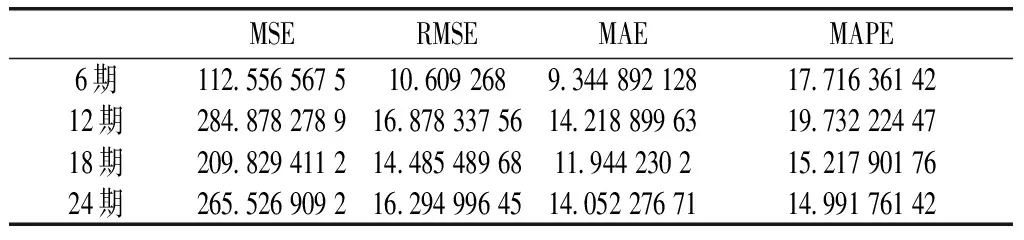
E(xsεt)=0,?s (1) 式中:B為延遲算子;Φ(B)=1-φ1B-…-φpBp,是自回歸系數多項式;Θ(B)=1-θ1B-…-θqBq是移動平均系數多項式,模型系數求解一般使用最小二乘估計或極大似然估計。若q=0,那么AEMA(p,q)就退化成AR(p)模型;若p=0,ARMA(p,q)就退化成MA(q)模型。 使用ARMA模型時,需要先檢驗序列的平穩性,如果序列平穩,一般可以根據序列的自相關和偏自相關系數確定ARMA模型階數;如果序列不平穩,需要對序列進行差分處理,提取趨勢、周期等信息得到平穩序列后再建立ARMA模型,就可得到ARIMA模型。 基于本次樣本數據可統計出日照市路口浮動車每天車流總量和每小時的過車量,如圖2所示,日照市路口出租車每日總流量在50萬輛上下浮動(5月18日數據缺失,視為異常值,刪除),如圖3所示序列總體呈現出較強的周期性、時變性和非線性,時間上的分布特征明顯。接下來,使用K-Means聚類法和ARIMA模型分別分析日照市每日居民出行分布和關鍵路口車流量預測。 圖2 日照市路口日流量時序圖 圖3 路口小時流量時序圖 為了充分考慮到節假日對城市出行產生的影響,本次研究選擇2020年5月1日和5月8日為樣本。綜合描述性統計分析和K-Means聚類法,可得到居民出行在時間和空間上的分布為。 (1)時間上,每日出租車出行量有3個高峰,分別為上午高峰(7時~11時)、下午高峰(14時~19時)和夜間高峰(21時~22時),說明城市交通流量分布和居民工作和娛樂出行密不可分。 (2)空間上,工作日車流量較大的區域集中在市政中心、商業區、日照市各大醫院附近,節假日車流量主要集中在旅游景點、商業區和高鐵站附近,存在一定的節假日效應。工作日居民的出行主要以工作、就醫為主,節假日則主要以娛樂、休閑為主。 基于日照市居民節假日和工作日出行在時間和空間分布的特征,我們發現居民的出行存在一定的周期規律。由于區域或路口客流量的大幅增加會給道路通行帶來巨大的壓力,如果能夠合理、準確地預測重要路口的過車量,為居民出行提供路況信息,可以為減緩道路通行壓力提供一定的幫助。 在對城市關鍵路口車流量的分析中以大連路和北京南路交叉口為樣本,北京南路作為日照市的重要交通樞紐,其過車量具有一定的代表性。在后面的研究中以該路口5月前30天中每小時過車量序列,預測其5月31日的每小時過車量。 圖4 大連路、北京南路交叉口過車量序列分析 圖4(a)表明該路口出租車的過車量呈現出明顯的趨勢性和一定的周期性,ADF平穩性檢驗后p值遠小于顯著水平0.05,故該序列平穩。在建模中從時間序列的隨機性分析和確定性分析兩個角度出發,分別使用ARIMA季節模型和Holt-Winters三參數指數平滑模型。圖4(b)可知序列自相關拖尾并且包含明顯的周期因素,故對序列進行一階2步差分。 圖5 大連路、北京南路交叉口過車量序列殘差分析 對序列進行一階24步差分后,序列平穩,由于原序列的長期趨勢并不明顯,但是存在一定的短期趨勢。此處我們選擇加法和乘法ARIMA季節模型、Holt-Winters三參數指數平滑模型。如圖5(a)所示自相關和偏自相關系數,我們選擇ARIMA(1,(1,24),)加法季節模型和ARIMA(1,11)×ARIMA(0,11)乘法季節模型進行擬合。在確定性分析中,也同樣選擇了加法和乘法模型,四個模型的AIC值如表1所示。 表1 擬合模型AIC值 基于AIC準則,選擇ARIMA(1,11)×ARIMA(0,11)乘法季節模型描述該路口期望出租車過車量的時變性,模型如下 (2) 模型殘差序列白噪聲檢驗顯示模型的殘差短期內不存在相關性,模型擬合效果理想,可以接受。殘差序列的方差齊性檢驗顯示,平方殘差序列不存在短期自相關性,根據圖6(b)可知殘差符合正態性假設且不相關,故認為ARIMA(1,11)×ARIMA(0,11)乘法季節模型可以用來刻畫該序列并進行預測。 由于ARMA族模型更適用于短期序列的預測,如果進行長期預測,預測誤差會逐漸變大,作為對比分別進行了6期、12期、18期和24期預測,預測效果如圖6(b)所示,預測精度地評價指標如表2所示。從RMSE(均方誤差)來看,6期預測的精度更高,因為隨著預測期數的增加,RMSE也有一定程度地增加。由于RMSE對異常值敏感,說明超過6期的預測中,有個別點的預測誤差較大,MAE(平均絕對誤差)也驗證了這一點,這與圖6(b)的預測結果是一致的。在對預測精度要求較高的情況下,我們推薦使用短期預測。 圖6 大連路、北京南路交叉口過車量序列預測結果 表2 ARIMA(1,1,1)×ARIMA(0,1,1)乘法季節模型預測精確度指標 本文基于出租車浮動車和地圖數據,提出了一種結合點到點匹配與車輛行駛軌跡的地圖匹配算法,分析了城市居民的出行分布,預測了城市關鍵路口過車量。目前的研究成果還有很多需要進一步深入探索的地方,例如車流量預測中只考慮了特征路口,沒有對整個城市路網的車流量實現預測;ARMA族模型在非線性序列預測和長期預測上有一定地劣勢,可以考慮多模型組合的方法改進,在保證預測精度的基礎上,延長預測時間。希望在未來的研究中,充分融合多學科知識,為城市交通優化提供科學的方法和支持。3 實證分析
3.1 路口起訖點分布
3.2 路口過車量預測

4 結 論
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
中學數學雜志(初中版)(2006年1期)2006-12-29 00:00:00