燒結機臺車欄板間隙密封的機械手系統設計
2021-12-08 13:46:19王睿訓邢建國
青島大學學報(工程技術版) 2021年4期
王睿訓 邢建國
摘要: 針對燒結造塊煉鐵工藝中存在的燒結臺車欄板間漏風問題,本文主要對懸掛式雙機械手操作的燒結機臺車欄板間隙密封系統進行設計。以某鋼廠燒結生產線為研究背景,運用三維建模軟件,對機械手結構、機械手驅動方案及機械手的傳動方案進行設計。選用三菱FX3U及FX2N20GM兩軸插補模塊,通過程序擴展,實現三菱FX3U與FX2N20GM同時對4個步進電機的順序控制,并給出了該系統硬件電路設計。同時,利用實驗室步進電機及滾珠絲杠滑臺,建立機械手模擬裝置,用于開關模擬輸入信號,進行實際生產狀況的模擬實驗。實驗結果表明,控制程序正確可行,控制系統達到應用要求。該研究有效降低了燒結臺車欄板間漏風問題,節約電力能源,產生可觀的經濟效益。
關鍵詞:燒結機漏風; 懸掛式機械手; FX3U; FX2N20GM; 運動平臺
中圖分類號: TP241.2; TF802.67 文獻標識碼: A
隨著現代化進程的飛速發展,各行業對鋼鐵的需求逐年增加,據統計,2020年我國的鋼鐵產量達到了世界鋼鐵產量的56%,位居鋼鐵產量第一大國[1-2]。同時,國家提高了對鋼鐵行業節能減排的要求,為提高燒結機產能,國內眾多學者和鋼鐵企業對燒結機的漏風治理問題進行了相關研究[3]。目前,現有的燒結漏風防治技術大多集中在解決臺車與風箱結合處兩側部(即滑道)、臺車與風箱結合處兩端部(即頭尾)的動密封處及大煙道灰箱排灰、風管道系統的破損等靜密封處的漏風問題,在一定程度上解決了臺車的部分漏風問題[4-7]。但由于臺車欄板間設計時預留間隙(1 mm),加之欄板之間變形,形成2~10 mm不等的間隙,同一處的上、下間隙量也不等,對漏風影響較大(占15%)。同時臺車間的密封還沒有有效的解決辦法,這是由于在生產中燒結臺車是持續運動,在頭尾部,臺車要相互分開,同時要經過點火區,對其進行防漏風處理十分困難,一些常規的密封方式無法滿足要求。孫國強[8]提出了一種全密封裝置,側面用擋板,料面上用皮帶,通過負壓吸附在表面,形成一個整體密封空間,使用效果較好;高彥[9]研究一種類似的全封閉裝置,側面及底部由密封帶包圍,料面上方由多行絲狀物、薄鋼板或耐高溫不透氣的布接觸料面;胡子國等人[10]設計了一種燒結機臺車欄板密封裝置及密封系統,通過磁性密封簾,將臺車欄板之間的縫隙密封,從而防止臺車欄板漏風,所采用的密封簾由隔熱層、不銹鋼網層、磁性膠體層組成,其中磁性層將密封簾吸合到臺車間。基于此,本文針對燒結生產線的相關工況及后期便利維護保養,設計一種懸掛式機械手來抓取密封帶,放置到燒結臺車欄板間縫隙處,以解決漏風問題。首先設計機械手總體方案,運用三維建模軟件,對機械手整體結構進行設計,并確定了機械手的驅動方式及傳動方式。同時,選用FX3U作為機械手控制系統主控單元,對控制系統的I/O點進行了分配,并運用三菱FX2N20GM定位模塊進行兩軸插補運動。該控制系統達到實際應用要求,具有實際應用價值。
1系統總體方案
本研究以某鋼廠燒結生產線為背景,擬在臺車欄板間隙上放置密封帶,對系統總體方案進行設計。采用懸掛式機械手進行自動操作,具體操作步驟如下:
1)在臺車首尾及點火區外的直線運行段進行密封,不必考慮轉彎段欄板間隙變化和臺車運行跑偏,以及點火區高溫和燒烤的影響,降低了對密封材料的要求。
2)利用負壓作用,使密封帶吸貼在欄板縫隙上,可在密封帶上增加磁性條,使密封帶吸附更牢靠。
3)采用機械手結構貼放和取下密封帶,通過三菱FX3U48MT控制,完成機械手操作和臺車運動的聯動控制,實現密封帶的自動取、放和位置要求。
4)一條燒結線共設4臺懸掛式機械手,并通過鏈條傳送帶輸送密封帶,不占用燒結線的地面空間,對生產監控和維修沒有影響。
5)密封起始位置在點火段之后,終止位置在機尾卸礦處之前,共有16處臺車欄板間隙需要密封。
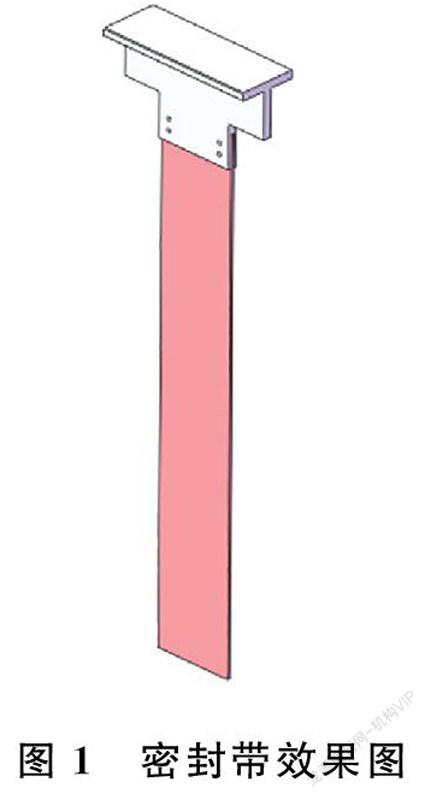
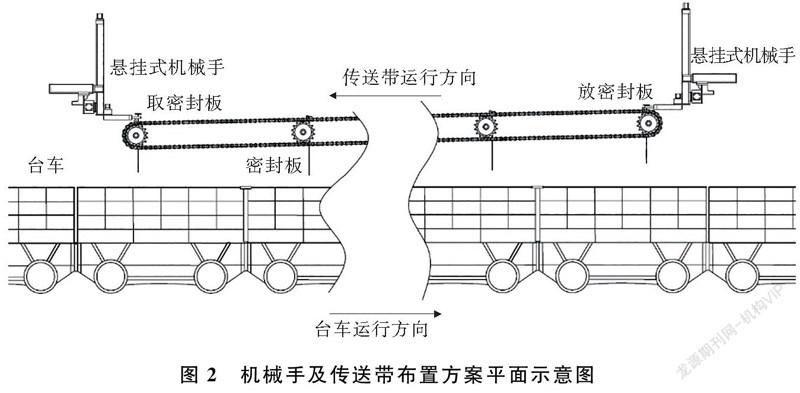
結合實際生產需要,根據臺車長度、高度以及臺車運行速度等因素,進行了機械手與傳送帶相對位置的布置。密封帶效果圖如圖1所示,機械手及傳送帶布置方案平面示意圖如圖2所示。
2機械手總體設計方案
2.1機械手結構設計方案
為了適應不同生產線工況的需求,機械手可采用多種運動形式和結構。機械手的具體形式需要根據實
際生產線作業要求和現場布局位置等條件進行選擇。
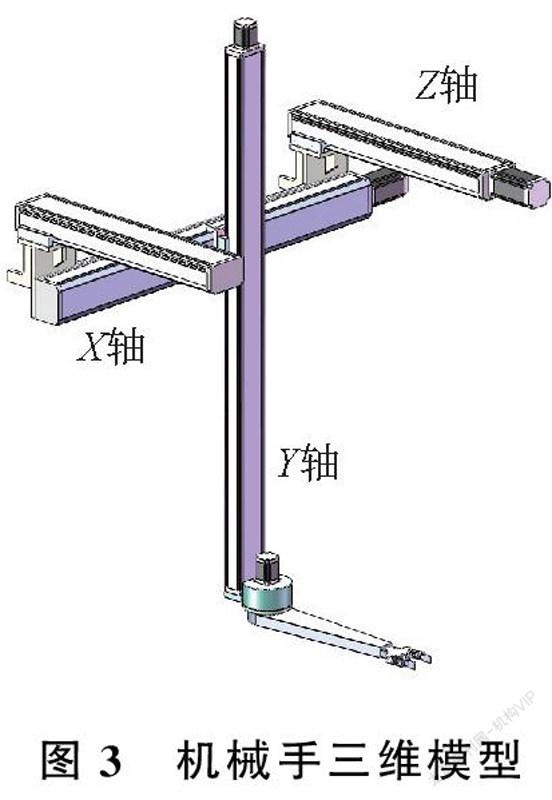
工業機械手主要有4種坐標形式,即直角坐標式、圓柱坐標式、球坐標式和關節坐標式[11]。通過分析對比工業機械手各種坐標式的優缺點,并結合生產實際,因此選用直角坐標式作為本機械手的坐標形式,其具有機械臂各個運動方向相對獨立解耦、控制方便、可實現大行程、高精度、長壽命、操作簡單、安裝使用和維護簡便、成本低等特點[12]。整個機械手包括X軸、Y軸、Z軸3個方向的直線運動及一個機械手臂的轉動,具有4個自由度。其中X軸長為1 000?mm,Y軸長為1 500 mm,Z軸長為500 mm,旋轉手臂長為350 mm。機械手三維模型如圖3所示。
2.2機械手驅動方案設計
機械手可采用電機驅動、氣壓驅動、液壓驅動3種驅動方式以及組合驅動[13]。根據實際生產應用情況,電機驅動可通過連接PLC和個人計算機,精確地控制機械手的工作位置和姿態,因此該機械手選用電機驅動。
機械手的電機驅動又分為伺服電機驅動和步進電機驅動,本文所設計的為懸掛式機械手,工作時負載較小,精度要求不高,因此選用步進電機驅動,其具有控制簡單、可靠性較高、成本較低等特點[12]。其中,X軸與Z軸選用86 mm三相步進電機,絲杠螺距為6 mm,脈沖當量為0.01 mm;Y軸選用57 mm三相步進電機,絲杠螺距為6 mm,脈沖當量為0.01 mm;旋轉手臂選用57 mm三相步進電機,步距角為0.1°。
2.3機械手傳動方案設計
本機械手的X軸、Y軸和Z軸移動關節均采用圓柱導軌支承、滾珠絲杠傳動,回轉關節由步進電機直接驅動。
3機械手控制系統設計方案
根據所設計的懸掛式機械手的整個運動過程,控制流程比較簡單,因此選用PLC作為控制器,其抗干擾能力強、可靠性高,同時具有各種規模的系列化產品,功能完善,配套齊全[14-16]。本文選用三菱FX3U[17]及FX2N20GM兩軸插補模塊來實現機械手的動作。燒結線前端機械手控制流程圖如圖4所示,燒結線末端機械手控制流程圖如圖5所示。
3.1確定控制系統的I/O數
通過結合主程序流程圖,確定控制系統的I/O數量。I/O地址分配表如表1所示。
3.2控制系統接線原理圖
本系統選用三菱FX3U48MT作為主控單元,FX2N20GM作為核心定位單元,二者通過連接電纜FX2NGM5EC進行連接,實現數據交換,其中兩軸定位模塊FX2N20GM的CON3和CON4分別對應連接X軸和Y軸的步進驅動器端子[18],而Z軸與旋轉臂則由FX3U48MT直接進行高速脈沖輸出,選用威綸觸摸屏進行人機交互,與FX3U48MT通過通信電纜進行通訊,對現場進行實時監控與控制[19]。控制系統接線原理圖如圖6所示。
3.3FX2N20GM定位模塊程序
三菱FX2N20GM定位模塊采用FXVPSE專用編程軟件,可輸出高速脈沖序列,還可以同時控制兩根軸運動,進行直線插補和圓弧插補,可通過絕對驅動方法和增量驅動方法指定位移,并且具有兩軸絕對位置檢測功能,可以通過控制電機的轉速和轉角,實現所需的運動軌跡[18]。
FX2N20GM定位模塊通過PLC的FROM指令,可以把其緩沖區BFM#20和BFM#21中的內容讀取到PLC中,通過TO指令,可以把PLC寄存器中的內容寫入緩沖區BFM中[20]。FX2N20GM控制流程如圖7所示。圖7中,在寄存器DD100中,存儲直線X軸方向的終點坐標值;在寄存器DD102中,存儲直線Y軸方向的終點坐標值;在寄存器DD104中,存儲暫停時間值。FX2N20GM的參數寫入程序如圖8所示。
4實驗驗證
利用實驗室的步進電機及滾珠絲杠滑臺進行模擬實驗,根據所設計機械手的運動形式和結構,建立機械手的模擬裝置,將PLC與步進驅動器以及各控制開關正確接線,用手動開關模擬接近開關和限位開關,模擬輸入信號,將編寫的程序寫入PLC中,通過控制開關,模擬工業機械手的運動過程。通過實驗可知,該機械手可滿足燒結生產線的實際生產需求,控制程序正確可行。
5結束語
本文設計了一種4個自由度的懸掛式雙機械手。該設計給出了機械手及傳送帶布置方案、密封板的設計,機械手的坐標形式及驅動方案,并對機械手進行三維建模,并采用三菱PLC及FX2N20GM兩軸插補模塊進行程序設計,最后通過模擬實驗,驗證控制程序的正確性和可行性,實驗結果表明,本研究所設計的控制系統達到實際生產要求,在實際生產中,可有效降低燒結臺車欄板間漏風率,節約能源,產生可觀的直接經濟效益。該機械手可以滿足燒結生產線的實際生產需求,具有實際應用價值。
參考文獻:
[1]龔奐彰, 黃秀玉. 鋼鐵行業碳減排技術應用與展望[J]. 中國冶金, 2021, 31(9): 5358.
[2]趙明珠. 鋼鐵冶煉系統中的節能技術應用[J]. 山西冶金, 2020, 43(2): 170171, 177.
[3]張安煜. 燒結機漏風控制技術探究[D]. 青島: 青島大學, 2019.
[4]王興連. 我國燒結裝備技術發展現狀及指標分析[J]. 冶金管理, 2011(11): 5760.
[5]趙軍凱, 侯建, 姜林. 邯鋼435m2燒結機漏風治理與節能[J]. 冶金能源, 2020, 39(3): 4347.
[6]李安平. 132m2燒結機全密封漏風治理[J]. 中國高新技術企業, 2012, 229(22): 5557.
[7]馬濤, 張遠東, 李春泉, 等. 燒結一部燒結機系統漏風治理[J]. 包鋼科技, 2018, 44(4): 2326.
[8]孫國強. 提高燒結機產能的措施[J]. 河北冶金, 2014(7): 4042.
[9]高彥. 用于燒結機或帶式焙燒機全密封的臺車料面密封裝置: 中國, 102767949 A[P]. 20120726.
[10]胡子國, 李咸偉, 劉道清, 等. 燒結機臺車欄板密封裝置: 中國, 107782143 A[P]. 20180309.
[11]田樂帥. 沖床上下料機械手的設計與研究[D]. 青島: 青島科技大學, 2016.
[12]李佳. 自動上下料機械手的設計研究[D]. 北京: 北京郵電大學, 2019.
[13]歐斯文. 一類自動上下料機械手的研究與開發[D]. 合肥: 合肥工業大學, 2018.
[14]徐帥. 基于PLC的氣動搬運機械手控制系統[J]. 儀表技術與傳感器, 2016(9): 7578.
[15]鮑澤富, 胡廣珊. 基于PLC的二層臺自動排管機械手控制系統設計[J]. 制造業自動化, 2019, 41(12): 8689.
[16]Zhang G L, Sun S L, Wang L, et al. Control system design of three axis manipulator based on PLC and kingview[J]. Manufacturing Automation, 2018, 40(11): 9396.
[17]三菱公司. FX3U·FX3UC系列微型可編程控制器編程手冊[Z]. 日本: 三菱公司, 2005.
[18]FX2N10GM. FX2N20GM Hardware/Programming Manual[Z]. Japan: Mitsubishi Corporation, 2000.
[19]韓桂榮, 陳緒兵. 基于PLC、機器人和視覺系統的汽車輪轂全自動搬運系統設計[J]. 現代制造工程, 2017(9): 5258.
[20]薛永風, 朱學軍, 方赟. 基于FX2N20GM的雙軸步進控制系統設計[J]. 組合機床與自動化加工技術, 2011(9): 7376.
作者簡介: 王睿訓(1996),男,碩士研究生,主要研究方向為機械電子工程。
通信作者: 邢建國(1964),男,博士,教授,主要研究方向為數控技術。Email: xingjg@qdu.edu.cn
Design of the Manipulator System for the Gap Sealing of the Sintering Machine Trolley
WANG Ruixun, XING Jianguo
(College of Mechanical and Electrical Engineering, Qingdao University, Qingdao 266071, China)
Abstract: ?Aiming at the problem of air leakage between the sintering trolley rails in the sintering lump ironmaking process, this paper mainly designs the gap sealing system of the sintering trolley rails operated by a suspended dualmanipulator. It takes a steel plant sintering production line as the research background, and uses threedimensional modeling software to design the manipulator structure, manipulator drive scheme and manipulator transmission scheme. It choose Mitsubishi FX3U and FX2N20GM twoaxis interpolation module, through program expansion, realizes the sequence control of Mitsubishi FX3U and FX2N20GM to 4 stepping motors at the same time, and gives the hardware circuit design of the system. At the same time, the laboratory stepper motor and ball screw slide are used to establish a manipulator simulation device for switching analog input signals and performing simulation experiments on actual production conditions. The experimental results show that the control program is correct and feasible, and the control system meets the application requirements. The research effectively reduces the air leakage between the sintering trolley bars, saves electricity and energy, and produces considerable direct economic benefits.
Key words: air leakage from sintering machine; suspended manipulator; FX3U; FX2N20GM; motion platform