基于子空間的Kalman盲自適應Rake接收機
2021-12-08 12:23:24王瑞華
數字通信世界 2021年11期
雍 慧,王瑞華
(寧夏回族自治區無線電管理委員會辦公室,寧夏 銀川 750000)
0 引言
盲多用戶檢測技術因不再需要采用訓練序列,同時能夠提高系統的動態跟蹤能力,近年來已經成為多用戶檢測技術的一個研究熱點。盲多用戶檢測的LMS、RLS、Kalman三種盲自適應算法當中,基于Kalman濾波的盲多用戶檢測算法收斂速度更快、跟蹤信道變化的能力更強,在迭代過程中可以獲得更低的穩態剩余輸出能量,但是算法運算復雜度比較高,對硬件提出更高的要求[1]。因此,為了獲得更低的計算復雜度以及更快的收斂速度,受信號子空 間處理的啟發,本文將傳統的Kalman濾波和子空間方法結合,對Kalman濾波算法進行改進;并將改進的盲自適應算法應用于有效抗多徑干擾的Rake接收機,以更好地抑制多徑及多址干擾。
1 系統模型
在加性高斯白噪聲的信道環境下,有K個用戶的同步CDMA系統中,其接收端的基帶信號可表示為:

式中,Ak表示第k個用戶的信號幅度;{bk(i)∈{-1,+1}}是第k個用戶發送的信息序列;Tb是信息符號的間隔;n(t)是具有單位功率譜密度的高斯白噪聲;σ是高斯白噪聲的均方誤差;Sk(t)是第k個用戶的歸一化特征波形。
設用戶1為期望用戶,則接收到的信號可表示成:

式中,r=[r(0),r(1),…,r(N-1)]T為接收信號向量;Sk=[Sk(0),Sk(1),…,Sk(N-1)]T為特征波形向量;v=[v(0),v(1),…,v(N-1)]T是噪聲向量。式(2)右邊的3項依次為期望的用戶信號、所有其他干擾用戶的信號之和、信道噪聲。
2 改進的盲自適應算法及其性能評價
2.1 Kalman盲自適應多用戶檢測[2]
設用戶k為待檢測用戶,利用線性檢測器典范表示2:

式中,向量Wk(n),Sk分別是Ck(n)的自適應部分和非自適應的部分。
對于一個時不變的CDMA系統,構造出多用戶檢測系統的矢量狀態方程以及觀測方程:

基于Kalman濾波算法的盲多用戶檢測描述如下:已知觀測方程矩陣dH(n),使用觀測的數據對狀態矢量Wklopt的各系數在每個n≥1時進行最小均方誤差估計。適用于時不變系統的盲自適應多用戶檢測的Kalman流程如圖1所示[3]。

圖1 時不變系統的盲自適應多用戶檢測的Kalman流程
2.2 改進的基于子空間的Kalman盲自適應算法[4]
根據CDMA系統接收端信號的數學模型的子空間處理方式,定義盲多用戶檢測算法的一種新的典范表示:
首先進行信號子空間估計,其次進行和傳統Kalman自適應盲多用戶檢測類似的濾波估計。信號子空間估計:

(3)構造矩陣:假設,Us=[u1u2…uk],令F=[s1u1… uk-1],對矩陣F應用斯密特方法得到和F正交的矩陣Z=[s1z1…zk-1]。
(4)對矩陣Z進行正交化以獲得一個正交矩陣,Sk,null=[z1…zk-1],以Sk,null為新觀測矩陣,即期望用戶波形向量Sk的零空間。
上式中的Sk,null是N×(k-1)維的矢量,這樣由公式(6)得到Wk(n)是一個k-1維的矢量。但是基于卡爾曼濾波算法的盲多用戶檢測器中Sk,null與Wk(n)分別是N×(N-1)維和N-1維矢量。在一般情況下,由于K小于N,因此,用基于子空間的卡爾曼濾波算法進行遞推估計Wk(n)時的運算復雜度降低了。基于Kalman濾波算法的盲自適應多用戶檢測器計算復雜度為O(N2),而基于子空間分解的Kalman的盲多用戶檢測器計算復雜度為O(NK)。由于多徑衰落對信號子空間的影響明顯要比對信號本身的影響小,使用信號子空間Us來計算得到的Sk,null,檢測器有非常強的抗多徑衰落能力。
2.3 改進算法性能評價
基于子空間的Kalman盲多用戶檢測算法在高斯白噪聲信道下的性能通過仿真實驗評估:
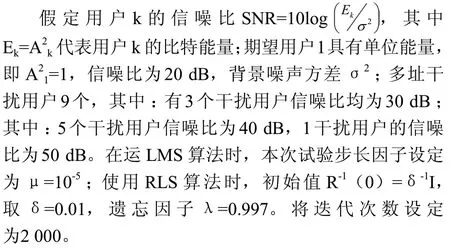

圖2(a) 加性高斯白噪聲信道中時間平均信干比比較
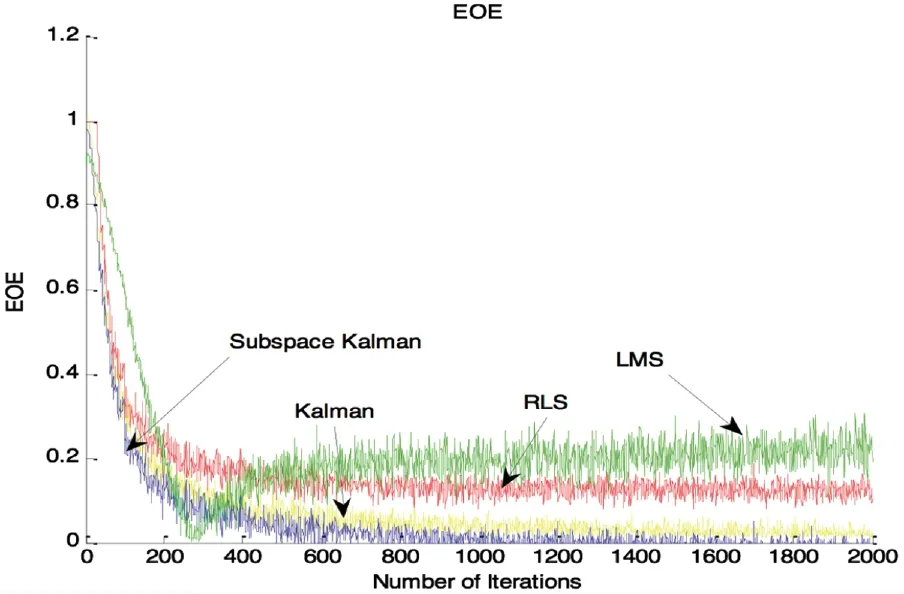
圖2(b) 加性高斯白噪聲信道中時間平均剩余輸出能量比較
由圖2可知:基于子空間方法的Kalman濾波盲多用戶檢測算法在抑制MAI的過程中比起經典Kalman濾波算法、RLS算法以及LMS算法均能夠獲得較高的信干比,具有最快的收斂速度。改進算法最終收斂于20 dB,算法的剩余輸出能量值接近零值,這表明SINR中的MAI已經幾乎被完全消除,即對MAI的抑制能力最強。
基于子空間分解卡爾曼濾波的盲多用戶檢測算法,通過改進的求解方式來提高算法復雜度。表1列出了二種檢測器的運行時間,從中可以看出改進算法的運算復雜度比較低。

表1 兩種基于Kalman濾波算法的盲多用戶檢測器運行時間的比較
綜上所述:四種盲自適應算法中,基于子空間的Kalman盲多用戶檢測均具有相對較高的SINR、較好的收斂性、較低的算法復雜度、能更有效的抑制多址干擾。特別的,改進的盲多用戶檢測還具有很強的抗多徑衰落的能力。主要是因為改進算法首先采用子空間分解的方法計算Ck,null,然后用Kalman算法遞推估計Wk,opt,而多徑衰落對信號子空間的影響要小于對信號本身的影響。所以子空間的Kalman盲多用戶檢測不僅可以降低算法的復雜度,且具有很強的抗多徑衰落的能力。
3 改進的盲自適應算法的應用
子空間的Kalman盲多用戶檢測不僅能抑制多址干擾,且具有很強的抗多徑衰落能力,算法復雜度低,選擇基于子空間的Kalman多用戶檢測算法及最大比率合并方式應用于頻率選擇性慢衰落信道,構成盲自適應多用戶Rake接收機。
盲自適應多用戶檢測Rake接收機的基本思想是對用戶k的各個路徑的信號分別盲自適應去相關,然后按照Rake接收機的思想將去相關后的各路徑的信號進行合并[5]。

圖3 傳統接收機和盲自適應多用戶檢測Rake接收機誤碼率比較曲線

圖4 多址干擾不同時盲自適應多用戶檢測Rake接收的BER比較
4 結束語
基于子空間的Kalman盲自適應算法相對LMS、RLS、Kalman三種盲自適應算法具有更低的計算復雜度和更快的收斂速度,較好的抗多徑干擾效果,即改進的多用戶檢測算法對多徑和多址干擾都有很好的抑制作用。鑒于基于子空間的Kalman多用戶檢測有以上優良性能,將改進的盲多用戶檢測算法與基于最大比合并的Rake接收機結合。仿真結果表明,相對于傳統的Rake,盲自適應多用戶檢測rake接收機對干擾具有更好的抑制能力。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年6期)2016-06-29 09:18:54
海峽科技與產業(2016年3期)2016-05-17 04:32:12
商用汽車(2016年4期)2016-05-09 01:23:12