基于運(yùn)動(dòng)仿真的堆取料機(jī)副尾車(chē)受力分析
2021-12-06 19:10:52李建瑩
裝備維修技術(shù) 2022年3期
李建瑩

摘 要:堆取料機(jī)可俯仰式副尾車(chē)受力狀態(tài)復(fù)雜,無(wú)法快速確定結(jié)構(gòu)上各個(gè)位置受力最大時(shí)的俯仰角度,且每個(gè)俯仰角度下各個(gè)位置受力情況的理論計(jì)算都很繁瑣。應(yīng)用運(yùn)動(dòng)仿真可方便準(zhǔn)確的獲得各個(gè)部件的受力過(guò)程,為強(qiáng)度校核提供依據(jù)。本文將演示如何基于NXSimcenter運(yùn)動(dòng)仿真模塊對(duì)副尾車(chē)進(jìn)行動(dòng)力學(xué)運(yùn)動(dòng)仿真。
關(guān)鍵詞:堆取料機(jī);副尾車(chē);運(yùn)動(dòng)仿真
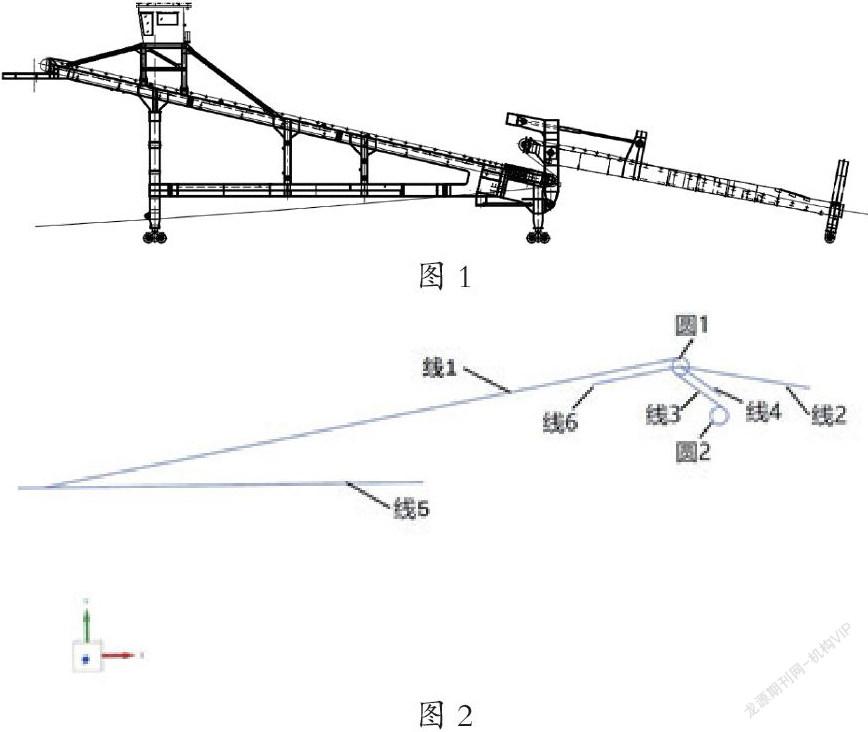
散料堆取設(shè)備中經(jīng)常使用帶有可俯仰副尾車(chē)的雙尾車(chē)(如圖1所示),以實(shí)現(xiàn)物料在同一條地面膠帶機(jī)上堆取和直通的功能。主尾車(chē)上安裝一條中繼膠帶機(jī),副尾車(chē)通過(guò)液壓缸驅(qū)動(dòng)進(jìn)行俯仰運(yùn)動(dòng)。副尾車(chē)的俯仰使地面膠帶機(jī)可繞過(guò)或不繞過(guò)主尾車(chē)尾部改向滾筒,從而實(shí)現(xiàn)物料落在或不落在中繼膠帶機(jī)上。副尾車(chē)在俯仰過(guò)程中,隨著鋼結(jié)構(gòu)和膠帶角度的變化,各個(gè)鉸軸、液壓缸及鋼結(jié)構(gòu)的受力都在不斷變化,無(wú)法快速確定各個(gè)位置受力最大的俯仰角度,且每個(gè)俯仰角度下各個(gè)位置受力情況的理論計(jì)算都很繁瑣,這對(duì)設(shè)計(jì)者校核副尾車(chē)強(qiáng)度造成了很大不便。借助運(yùn)動(dòng)仿真軟件對(duì)副尾車(chē)進(jìn)行動(dòng)力學(xué)仿真可方便準(zhǔn)確的獲得整個(gè)俯仰過(guò)程中,各個(gè)鉸軸、液壓缸及鋼結(jié)構(gòu)的受力情況,作為強(qiáng)度校核的依據(jù)。本文將演示如何基于NXSimcenter運(yùn)動(dòng)仿真模塊通過(guò)動(dòng)力學(xué)仿真的方式得出副尾車(chē)俯仰鉸軸、液壓缸等處的受力情況。
1.建立模型并定義運(yùn)動(dòng)體:
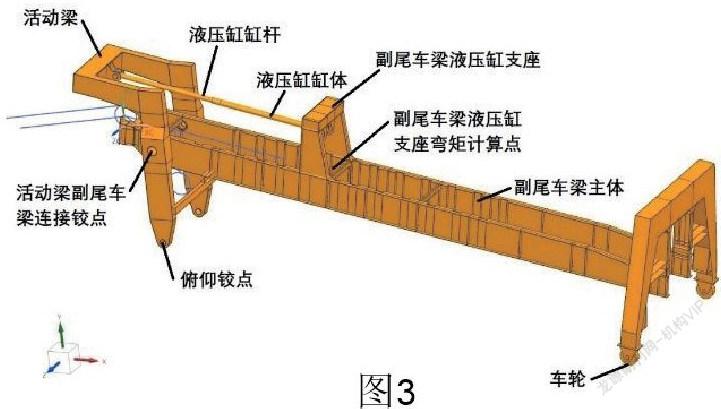
按照某一極限工況(本文中為堆料工況,既副尾車(chē)梁與水平面角度最大時(shí))下各部件的坐標(biāo)方位建立副尾車(chē)梁、活動(dòng)梁、液壓缸、車(chē)輪的三維模型并賦予材料屬性。其中,在副尾車(chē)梁模型中繪制出副尾車(chē)滾筒膠帶外廓的圓1、主尾車(chē)下部滾筒膠帶外廓的圓2及兩圓的外公切線(xiàn)線(xiàn)3;過(guò)圓1的圓心繪制一條與副尾車(chē)上膠帶平行的線(xiàn)線(xiàn)2和一條與線(xiàn)3平行的線(xiàn)線(xiàn)4,這兩條線(xiàn)將在仿真過(guò)程中用來(lái)為膠帶張力確定方向。繪制一條與圓1相切并且過(guò)地面膠帶機(jī)與托輥相接觸點(diǎn)的線(xiàn)1,此線(xiàn)模擬地面膠帶機(jī)揚(yáng)起部分。繪制線(xiàn)5以表示地面膠帶在托輥上的位置。為表示地面膠帶張力的方向,同樣要繪制一條過(guò)圓1的圓心且平行于線(xiàn)1的線(xiàn)6。各圓、線(xiàn)如圖2所示。將各部分三維模型裝配好后進(jìn)入仿真模塊。如圖3所示。
將副尾車(chē)梁模型中所繪制的線(xiàn)3、線(xiàn)4定義為運(yùn)動(dòng)體“主副尾車(chē)間皮帶”,以模擬處于主、副尾車(chē)滾筒間地面膠帶的運(yùn)動(dòng)和確定這部分膠帶的張力方向。將線(xiàn)1和線(xiàn)6定義為“副尾車(chē)與地面間皮帶”,以模擬與主尾車(chē)滾筒脫離接觸后的地面膠帶的運(yùn)動(dòng)和確定此時(shí)膠帶張力的方向。因?yàn)樾枰贸龈蔽曹?chē)梁上液壓缸支座根部受彎矩情況(由于液壓缸與支座間角度不斷變化,無(wú)法通過(guò)液壓缸受力情況推斷出此處所受彎矩何時(shí)為最大值),將活動(dòng)梁定義為兩個(gè)運(yùn)動(dòng)體。一個(gè)定義為運(yùn)動(dòng)體“副尾車(chē)梁液壓缸支座”包含活動(dòng)梁上液壓缸支座;一個(gè)定義為運(yùn)動(dòng)體“副尾車(chē)梁主體”包含活動(dòng)梁主體及圓1和線(xiàn)2。然后通過(guò)在這兩個(gè)運(yùn)動(dòng)體間建立固定運(yùn)動(dòng)副的方式進(jìn)行連接,這個(gè)固定運(yùn)動(dòng)副的受力狀態(tài)既反應(yīng)了副尾車(chē)梁上液壓缸支座與副尾車(chē)梁主體間力的傳遞。將活動(dòng)梁部分定義為運(yùn)動(dòng)體“活動(dòng)梁”;將液壓缸缸體部分定義為運(yùn)動(dòng)體“液壓缸缸體”;將液壓缸缸桿部分定義為運(yùn)動(dòng)體“液壓缸缸桿”;將車(chē)輪定義為運(yùn)動(dòng)體“車(chē)輪”。各個(gè)由實(shí)體模型建立的運(yùn)動(dòng)體的質(zhì)量屬性均設(shè)置為由軟件自動(dòng)生成,表示膠帶的公切線(xiàn)的質(zhì)量屬性根據(jù)各段膠帶重量手動(dòng)輸入。二、建立運(yùn)動(dòng)關(guān)系:
在運(yùn)動(dòng)體“活動(dòng)梁”上建立固定旋轉(zhuǎn)副,原點(diǎn)選為兩側(cè)俯仰鉸點(diǎn)中點(diǎn)處,方向?yàn)榛剞D(zhuǎn)鉸軸軸向;在運(yùn)動(dòng)體“活動(dòng)梁”與“副尾車(chē)梁主體”間建立相對(duì)旋轉(zhuǎn)副,原點(diǎn)為兩活動(dòng)梁副尾車(chē)梁連接鉸點(diǎn)中點(diǎn)處,方向?yàn)殂q軸
軸向;在運(yùn)動(dòng)體“活動(dòng)梁”與“液壓缸缸體”間建立相對(duì)旋轉(zhuǎn)副,原點(diǎn)為鉸軸中點(diǎn)處;在運(yùn)動(dòng)體“副尾車(chē)梁主體”與“液壓缸缸桿”間建立相對(duì)旋轉(zhuǎn)副,原點(diǎn)為鉸軸中點(diǎn)處,方向?yàn)殂q軸軸向;在運(yùn)動(dòng)體“液壓缸缸體”與“液壓缸缸桿”間建立相對(duì)滑動(dòng)副,原點(diǎn)為缸體鉸軸中點(diǎn)處,方向?yàn)橐簤焊纵S向;在運(yùn)動(dòng)體“車(chē)輪”與“副尾車(chē)梁主體”間建立相對(duì)旋轉(zhuǎn)副,原點(diǎn)為兩車(chē)輪回轉(zhuǎn)中心中點(diǎn)處,方向?yàn)檐?chē)輪軸向;在運(yùn)動(dòng)體“副尾車(chē)梁液壓缸支座”與“副尾車(chē)梁主體”間建立相對(duì)固定副,原點(diǎn)可根據(jù)強(qiáng)度校核需要確定,本文中原點(diǎn)選在副尾車(chē)梁主體蓋板上表面與液壓缸支座蓋板4條交線(xiàn)的對(duì)稱(chēng)中心處。在線(xiàn)3與線(xiàn)2間建立線(xiàn)在線(xiàn)上約束;在“主副尾車(chē)間皮帶”與“副尾車(chē)梁主體”間建相對(duì)旋轉(zhuǎn)運(yùn)動(dòng)副,原點(diǎn)為圓1的圓心處,方向?yàn)闈L筒軸向。在線(xiàn)1與線(xiàn)5間建立點(diǎn)在線(xiàn)上約束,使線(xiàn)1的左側(cè)端點(diǎn)始終在線(xiàn)5上。在運(yùn)動(dòng)體“副尾車(chē)與地面間皮帶”與“副尾車(chē)梁主體”間建立相對(duì)旋轉(zhuǎn)運(yùn)動(dòng)副,原點(diǎn)為圓1的圓心處,方向?yàn)闈L筒軸向。
2.施加驅(qū)動(dòng)及載荷并解算:
在液壓缸滑動(dòng)運(yùn)動(dòng)副上設(shè)置一恒速驅(qū)動(dòng)。
由于我們研究的是副尾車(chē)平穩(wěn)、勻速狀態(tài)下各點(diǎn)的受力狀態(tài),無(wú)需考慮加速度的影響,所以滾筒、膠帶、托輥等容易獲得重量、重心的載荷在仿真模塊中以矢量力模擬,這樣可大大簡(jiǎn)化模型,提高效率。
將膠帶張力以標(biāo)量力的方式加載到運(yùn)動(dòng)體“副尾車(chē)梁主體”上。將副尾車(chē)梁上所承載的地面膠帶的張力F1以常量表達(dá)式的方式加載在“副尾車(chē)梁主體”上,作用點(diǎn)選擇圓1的圓心(本文中地面膠帶張力按300000kN施加),方向沿線(xiàn)2。膠帶在副尾車(chē)俯仰過(guò)程中會(huì)與主尾車(chē)上的改向滾筒接觸或脫離,地面膠帶張力在副尾車(chē)滾筒上作用方向的改變規(guī)律將在膠帶與主尾車(chē)上的改向滾筒接觸、脫開(kāi)時(shí)發(fā)生改變。在地面膠帶與主尾車(chē)上的改向滾筒接觸期間,膠帶張力方向始終隨線(xiàn)4改變,當(dāng)?shù)孛婺z帶與主尾車(chē)上的改向滾筒不接觸期間,膠帶張力方向始終隨線(xiàn)6改變。地面膠帶何時(shí)與主尾車(chē)上的改向滾筒接觸可通過(guò)接觸與分開(kāi)臨界位置時(shí)液壓缸伸出量與在驅(qū)動(dòng)中所設(shè)置的速度得出(本文中實(shí)例臨界時(shí)間為380s)。為實(shí)現(xiàn)地面張力方向變化規(guī)律的轉(zhuǎn)換,我們將主尾車(chē)側(cè)地面膠帶張力分成兩個(gè)標(biāo)量力施加,力的幅值以“曲線(xiàn)2D”的方式定義),幅值曲線(xiàn)通過(guò)“手工輸入”的方式輸入。以標(biāo)量力F2模擬地面膠帶與主尾車(chē)上的改向滾筒接觸期間的地面膠帶張力,幅值曲線(xiàn)中380s以前的幅值為300000N,380s以后的幅值為0,作用方向沿線(xiàn)4。以標(biāo)量力F3模擬地面膠帶與主尾車(chē)上的改向滾筒接觸期間的地面膠帶張力,幅值曲線(xiàn)中380s以前的幅值為0,380s以后的幅值為300000N,作用方向沿線(xiàn)6。
建立動(dòng)力學(xué)解算方案并解算。解算方案中設(shè)置重力加速度的值和方向,開(kāi)啟反作用力輸出。解算開(kāi)始時(shí)間設(shè)置為0;解算結(jié)束時(shí)間不小于副尾車(chē)運(yùn)動(dòng)到另一極限工況所需的時(shí)間(運(yùn)動(dòng)到另一極限工況所需時(shí)間可通過(guò)副尾車(chē)兩極限工況間液壓缸行程和液壓缸滑動(dòng)副驅(qū)動(dòng)中所設(shè)置驅(qū)動(dòng)速度計(jì)算得出)。
3.從仿真結(jié)果中得出各關(guān)鍵點(diǎn)受力狀態(tài):
解算完成后,選擇任一運(yùn)動(dòng)體、運(yùn)動(dòng)副、約束均可在“XY結(jié)果視圖”中輸出相應(yīng)的位移、速度、力等仿真結(jié)果(如圖4所示)。圖5為活動(dòng)梁副尾車(chē)梁連接鉸軸的力幅值仿真結(jié)果,從圖中可以看出,活動(dòng)梁副尾車(chē)梁連接鉸軸在副尾車(chē)尾車(chē)俯仰至角度最大時(shí)受力最大,兩側(cè)鉸軸共受力1040KN。圖6為運(yùn)動(dòng)體“副尾車(chē)梁液壓缸支座”與“副尾車(chē)梁主體”間所建立的相對(duì)固定副的繞Z軸彎矩仿真結(jié)果(坐標(biāo)系參加圖3),此結(jié)果既是副尾車(chē)梁上液壓缸支座根部所傳遞的彎矩,液壓缸在副尾車(chē)俯仰至角度最大時(shí)彎矩最大,彎矩值1400KN*m。
總結(jié):
借助運(yùn)動(dòng)仿真軟件對(duì)副尾車(chē)進(jìn)行動(dòng)力學(xué)仿真可方便準(zhǔn)確的獲得整個(gè)俯仰過(guò)程中,各個(gè)鉸軸、液壓缸及鋼結(jié)構(gòu)的受力情況,作為強(qiáng)度校核的依據(jù),保證了設(shè)計(jì)的準(zhǔn)確性。而且,設(shè)計(jì)者從各個(gè)運(yùn)動(dòng)副的“XY結(jié)果視圖”中可看出各個(gè)部件受力的變化趨勢(shì),能夠更加準(zhǔn)確的掌握整個(gè)副尾車(chē)的工作狀態(tài)。
參考文獻(xiàn):
[1]北京兆迪科技有限公司.《UG NX 12.0運(yùn)動(dòng)仿真與分析教程》.北京:機(jī)械工業(yè)出版社,2018.12
