基于照相測量與三維激光掃描組合測量系統精度探究
2021-12-06 17:09:46洪建強李浩田文昊黨佳豪
裝備維修技術 2022年3期
洪建強 李浩 田文昊 黨佳豪
摘 要:本文在探討攝影測量和3D激光掃描技術的基礎上,構建了基于照相測量和激光掃描的測量系統,用高密度點云測量的方式來測試大尺寸工裝。該項目應用中的測量精度與三坐標測量機作比較,為中國航空工程公司和技術人員提供參考和意見。
關鍵詞:照片測量;3D激光掃描;測量系統;測量機
1照片測量原理及3D激光掃描技術原理
1.1照片測量原理
3D數據相機測量技術是一種基于數據可視化圖像處理和高精度測量技術的新型高精度測量技術。照相測量系統軟件采用結構光傳感技術、測量技術和人工智能算法分析技術對整體目標進行多次多方位拍照,獲取數據圖像信息內容,再對點云空間坐標進行校正根據三角測量原理。照相測量分為單機測量和雙相機測量系統。文中選用的進口相機和測量設備公差精度為5μm+5μm/m,其中鄭州辰維CIM3相機公差精度為3μm+3μm/m,sigma值為1。
1.23D激光掃描原理
線激光手持式3D掃描儀基于三角測量的基本原理。它具有內置校正功能。工作時,它利用回光標記點貼在被測物體上并引導激光線。2個攝像頭捕捉瞬時3D掃描數據信息。光源直接照射在被測物體上產生反射和折射,根據軟件重構為3D點云數據。可以根據照片測量得到標志點的平面坐標,并將其引入3D激光掃描,可以顯著提高掃描精度。文章中使用的掃描機設備的公差精度為:0.02mm+0.1mm/m。
2組成測量測試執行的全過程
為加強對拍照和掃描測量精度的驗證以及尺寸對精度的影響,選用大型模型進行測量測試。模型長8m,寬1.3m,設計有型面、刻線、法向孔和垂直孔具有要測量的象征性因素。使用公差精度為4.5μm+6.5μm/m的10米測量機對工裝的外觀設計進行測量,實測的數值假設為模型的真實值。為了對比結果更精確,每50毫米設置一個測量點。模型測試面共有1946個測量點。
2.1測量前的準備
在相機測量之前,必須根據反光標記對測量因素進行整體定位。照機測量系統軟件只能識別反光標記或激光投影儀投射的點,不能立即測量被測元件的測量點。根據布局人工標點,強烈推薦標志直徑,同時,3D激光掃描儀掃描時需要粘貼標記點。由于機器設備識別的反光點不同,反光點的厚度不同,拍照測量的反光標記3D激光掃描儀是無法識別的,但常用的是3D激光掃描儀的標志點,照相測量能夠識別其標志點。
2.1.1編碼點和測點布置
單臺相機無法表示被測物體是三維物體。照片必須用編碼標記點拼湊在一起。規定每張照片必須至少有6個編碼標記點,每兩張照片重疊編碼不少于4個點。本次調查中,每0.5米設置一個編碼標記點。編碼點以“田”字排列,布局合理,對被測因素具有有效的包容。
為了更好地保證測量的準確性,反光標志與被測的物體的尺寸比例必須在一定范圍內。每張照片中反光標志的尺寸應不小于3*3分辨率,反光標志至少應保證整體目標區域的尺寸為1/1000(強烈建議1/500以上)。標記點和編碼點的直徑均為6毫米。被測反射標記點按測量機測量點位排列。
2.1.2創建標準尺
照相測量得到的點云模型只是一個等比例的縮放體。因此,必須增加一個標準限制來還原點云的真實規格,并且可以測量詳細點云模型的規格信息內容。在整個測量過程中要使用兩個以上的標準尺,軟件對參考長度進行調整計算,多個參考長度可以合理識別并防止參考規則本身的錯誤。參考尺應與被測物體的尺寸盡可能大。激光跟蹤器用于創建大容量測量的虛擬參考標尺,本次利用測量機下模具參考點的平均誤差創建3個虛擬參考標尺。10毫米TOS目標已轉換。
2.2照片拍攝
通過拍照測量對模具上的目標點和編號點進行拍照,校正模具上的標記點坐標,去除掃描標記重新測量,作為手持激光器的選定點坐標掃描器。
2.3三維激光掃描
將相機測量系統軟件創建的掃描測量控制網的點坐標導入掃描儀手??機軟件中,設置掃描點距離,即可從模具的任意部位逐步掃描測量云數據。使用手機軟件進行數據網格管理解決方案,去除噪聲、修復網格圖、刪除不需要的數據、簡化數據等實際操作。嚴禁對掃描數據進行過度平滑和超大規模去噪。
2.4數據分析
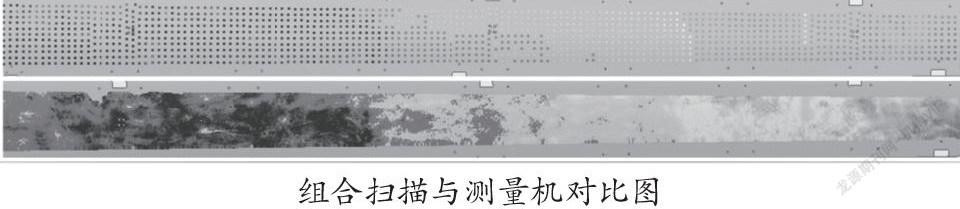
驗證每臺相機的精度,多臺相機拍攝數據的重復性,平面坐標與物理模型轉換誤差的統計分析,與理論模型即時對比的結果,最佳線性的結果與理論模型擬合等。在水平上進行綜合分析,利用三坐標測量值驗證照片測量、激光掃描測量的精度如下圖。為了防止最佳線性擬合優化算法出現多個標準值的線性擬合偏差,本次比較采用工作服標準孔坐標兩端對齊的方法對數據進行統計分析。
3試驗結論
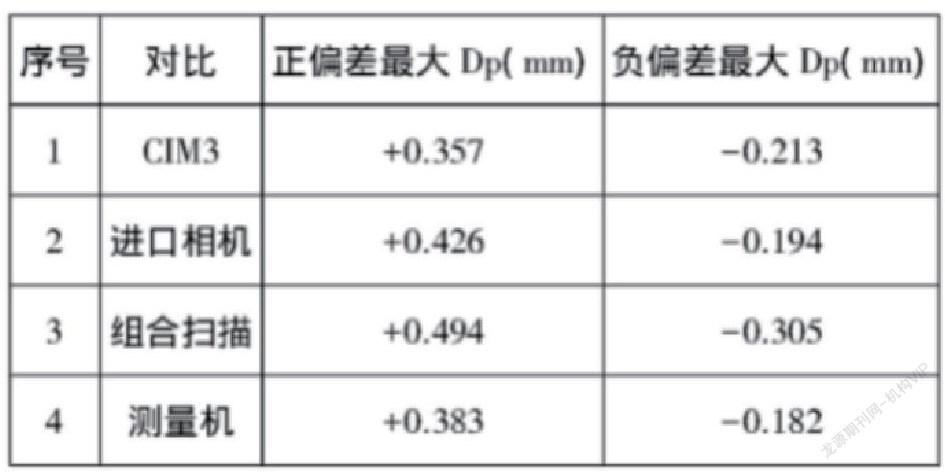
照片測量對于室內空間長度測量更準確。CIM3相機和測長機在414.542mm到2101.533mm五個長度范圍內使用,偏差大0.019;4組與數學模型的對比數據信息有較大偏差,具體數值見下表。
進口相機三維測量偏差在8米以內。與測量機的測量結果相比,正差為0.043毫米,落差為0.012毫米。相機的測量精度滿足機器設備允許誤差的指標值。同時,它在手機中。在軟件中,點云數據可以進行5次調整,其RMS沒有明顯降低。測量由照相測量和三維激光掃描組成。三維測量偏差為0.111mm,與測量機測量結果相比,在7.5米范圍內負偏差大于0.111mm,顯著提高了掃描精度。
結束語
拍照測量精度高、速度快、便攜,集成3D激光掃描。它可以測量間隔0.2毫米的云數據相對密度的大型零件的外觀設計。同時,它可以快速懷疑機場是常見故障。進行診斷對連接從設計方案、制造到安裝和測量的整個數據步驟具有主動作用,是電容網格測量的超強補充。
參考文獻:
[1]吳建幫,趙忠明.普通數碼照相測量在巖移模擬實驗中的應用[J].能源與環保,2018,40(08):108-112.
[2]李旭.基于基準特征照相測量反饋的制孔定位技術[D].南京航空航天大學,2018.
[3]曾媛,錢曉晨,顧頁妮,韓朝霞,陶春先.基于傅里葉變換的數字散斑照相測量[J].光學儀器,2018,40(01):1-7.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學與工程(2015年4期)2015-09-26 11:59:03
