超級電容巴士自動充電系統的設計
2021-12-03 08:32:44顏亮亮王祥賀
上海節能 2021年11期
關鍵詞:系統
章 錦 顏亮亮 王祥賀
1.上海奧威科技開發有限公司
2.同濟大學
0 引言
電動汽車充電方式主要有三種商業模式:換電模式、大型集中充電站模式和站臺充電樁模式。其中,換電模式和大型集中充電站模式主要適合于鉛酸電池、鋰離子電池等慢充類儲能方式,而快充電池、超級電容器儲能方式的新能源汽車,則需要充電系統能夠對車輛快速地識別定位,完成充電的連接,快速地充電。超級電容器因其高功率密度、相對較低的能量密度的特性,更需要解決如何快速充電的問題。近年來,新能源全自動充電成了研究新方向,特斯拉自主研發了一款蛇型機器人自動充電裝置[1],整個過程無需人員的參與,通過蛇形充電樁機器人自動尋找充電口,但結構復雜,控制運動速度緩慢,充電時間較長。德國大眾公司研發名為E-SMARTConnect的快速自動充電系統[2],采用的是小型機器人+電纜來實現,系統需要人工開啟,結構龐大。國內,對新能源汽車全自動充電的研究還處于起步階段,尚未見到商業化示范的報道。黎陽生[3]通過視覺CCD攝像機提取和跟蹤色塊信標,為機器人對接作引導、定準,但存在圖像處理算法復雜,難以快速識別,同時對接容忍度上還有缺陷,需要進一步提高精度。此外,石建軍[4]研究了基于光伏轉化的移動機器人自主充電系統,施瑩[5]等采用機器人和視覺傳感器,可實現電動汽車自動充電系統的插接自動化和精確控制,但系統的平衡和效率還有待提高。隨著2003年德國倍福公司提出的EtherCAT現場總線協議,其數據傳輸速度可以最快高達100M bit/s的工業以太網技術,具有極小的循環時間、高同步性、易用性和低成本特性,迅速在工業中得到應用,謝香林[6]通過EtherCAT網絡和DSP芯片,開發了EtherCAT從站設備,可實現運動系統高精度的位置控制。
本文通過在插槍充電系統的基礎上,構建了基于PC控制的大功率自動充電系統,控制單元采用高速運算的Beckhoff嵌入式PC控制器,通過EtherCAT協議總線,結合激光定位和多軸運動控制,實現充電系統對以超級電容作為儲能單元的新能源汽車快速、精準、全自動的對接,最終達到無需人員參與,一鍵啟動充電的目的。同時充電系統和車輛的信息實時交互,提高了超級電容巴士的充電效率和安全性。
1 自動充電系統的實現
基于嵌入式PC作為主控單元的自動充電系統的充電示意圖如圖1所示。

圖1 自動充電系統充電示意圖
超級電容巴士到站前,充電系統掃描車輛上的射頻電子標簽信號,識別目標車輛。完成識別后,充電系統自動連接車輛上的WIFI熱點,準備接受車輛的充電指令。當車輛駐車后,司機按下充電按鈕,PC控制器執行定位程序,通過激光以及超聲波的引導,四軸電機的運動,將充電插頭插入到車側的充電插座內,完成充電連接。充電過程中,PC控制器與車載超級電容系統無線通信,可按照超級電容系統的電壓電流需求,實時調整充電樁的輸出功率,對車輛柔性充電。充電結束后,超級電容系統發送停止充電指令,PC控制器驅動四軸電機回歸到零點位置,將充電連接器收回,司機亦可在任何條件下通過操作按鈕中止充電,PC控制器根據信號停止充電,充電結束。
2 自動充電系統的總體設計
2.1 自動充電系統的組成
自動充電系統的組成框圖,分為車載和站臺部分,如圖2所示。

圖2 自動充電系統的組成框圖
車載部分包括充電防護門、充電插座、超級電容管理系統(BMS)、整車控制器(EVCU)、駕駛室充電啟動按鈕、Y軸定位標志(激光反射貼膜)、Z軸定位標志(激光反射貼膜)、射頻電子標簽、WIFI熱點模塊。
站臺部分由充電防護門、充電插頭、嵌入式PC控制器、激光傳感器、備用激光傳感器、超聲波傳感器、射頻讀卡器、WIFI終端模塊、R軸伺服電機、X軸伺服電機、Y軸伺服電機、Z軸伺服電機組成。
2.2 自動充電系統的控制單元組成
硬件控制單元由Beckhoff嵌入式PC控制器CX5120-0115以及EtherCAT端子組成。Ether-CAT端子包括:8通道PNP型數字量輸入端子模塊EL1008、8通道PNP型數字量輸出端子模塊EL2008、4通道模擬量輸入端子模塊EL3054(4~20 mA)、2通道RS422/RS485串口端子模塊EL6022。PC控制器通過485轉WIFI模塊以實現和車輛的無線通信。自動充電系統的控制單元框圖如圖3所示。

圖3 控制單元框圖
2.3 自動充電系統的運動單元組成
自動充電系統的運動單元主要由伺服驅動器和伺服電機組成,共有四個軸(X軸、Y軸、Z軸、R軸)可以自由運動,每個軸上均安裝一個伺服電機,PC控制器CX5120-0115通過遠程控制接觸器的閉合,給伺服系統供電,通過EtherCAT總線與松下MINASA6B系列伺服驅動器組網連接,同時電機的位置信號通過編碼器反饋給伺服驅動器,運用Beckhoff公司的運動控制軟件TwinCAT NC PTP最終實現對電機的閉環控制。自動充電系統的伺服系統電路圖,如圖4所示。
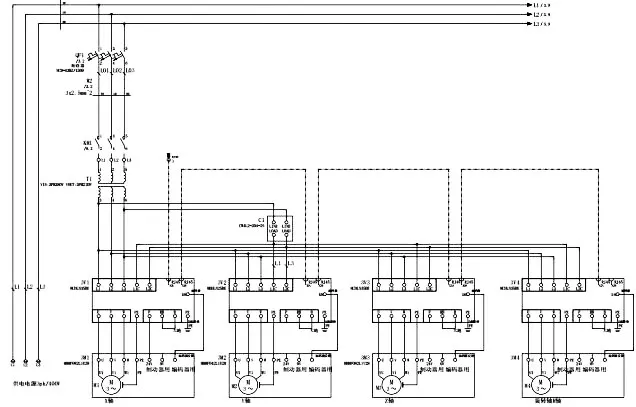
圖4 伺服系統電路圖
2.4 自動充電系統的路徑規劃
1)充電連接
充電開始,通過超聲波及激光信號的引導,PC控制器依次控制R軸、Y軸、Z軸、X軸伺服電機驅動充電插頭運行到定位位置,完成插槍過程,建立充電樁和車輛的充電連接。四軸運動的路徑,如表1所示。

表1 四軸的運動路徑
R軸,旋轉軸,驅動充電插頭水平角度轉動。
Y軸,與車輛行駛方向平行,驅動充電插頭左右移動。
Z軸,與車輛高度方向平行,驅動充電插頭上下移動。
X軸,與車輛充電接口垂直,驅動充電插頭前后移動。
2)定位運動
PC控制器控制Y軸、Z軸伺服電機驅動滑臺從位置0 mm運動到350 mm,激光傳感器掃過車輛上的反射貼膜,PC控制器收到反饋信號后記錄此時的電機位置Y1、Y2、……Yn以及Z1、Z2……Zn。PC控制器建立二維數組模型,計算出的插座中心點位置Yx、Zx。Y軸電機的定位運動圖例,如圖5所示。Z軸電機的定位運動圖例,如圖6所示。

圖5 Y軸電機的定位運動
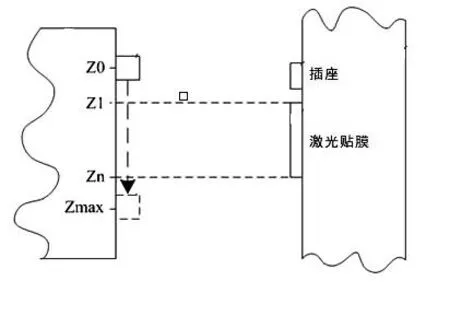
圖6 Z軸電機的定位運動
3)充電結束
充電連接完成后,充電樁對車輛進行充電,充電結束后或司機按下充電停止開關,PC控制器控制充電樁停止輸出,依次驅動X軸、Z軸、Y軸、R軸伺服電機回歸到零點位置,完成充電插頭的收回。
3 自動充電系統軟件設計
3.1 軟件總體設計
軟件系統采用Beckhoff的嵌入式PC(型號CX5130)作為主控制單元,并采用TwinCAT3軟件編程,除了實現運動控制,還通過模擬量通道實現對超聲波傳感器(對充電插頭和車輛充電接口的距離進行測量)、激光傳感器距離信號的采集,數字量輸入通道接收接觸器反饋信號、射頻信號,數字量輸出通道驅動接觸器、指示燈、蜂鳴器、防護門的動作。
充電樁與車輛充電接口的距離Xrms表示如下:
考慮到在電機運動時記錄的y、z軸位移值測量誤差問題,由于多數隨機誤差都服從正態分布,設被測量值的真值為L0,一系列測量值為li,則測量列的隨機誤差δi可表示為:

式中i=1,2,…,n。
正態分布的密度f(δ)與分布函數F(δ)為:

式中,σ——標準差(或均方根誤差)
其平均誤差為:

由式(3)可知,由于誤差的補償性,隨測量次數的增加,隨機誤差的算術平均值趨向于0。
由式(1)可知:
綜上,電機掃描判定插座中心水平位置YX、插座中心豎直位置ZX表示如下:
自動充電系統主程序流程圖,如圖7所示:

圖7 自動充電系統主程序流程圖
3.2 定位模塊軟件設計
通過調用TC2_MC2庫中的MC_MoveAbsolute功能塊,實現對電機的驅動,如圖8所示。

圖8 MC_MoveAbsolute功能塊
定位程序流程圖,如圖9所示。

圖9 定位程序流程圖
定位程序如下所示:
poweron();//軸上使能
absmove();//絕對運動
reset();//清除錯誤
y_velocityread:=axis2.Nc ToPlc.ActVelo;
y_positionread:=axis2.Nc ToPlc.ActPos;
IFyerrorid<>0 THEN//故障清除
resety:=1;
END_IF
IFglobal.zhome=0 THEN
IFglobal.rdone=1 AND y_positionread=0
THEN//R軸運動完成,執行Y軸掃描運動
global.yhome:=0;
resety:=0;//清reset
power:=1;
execute2:=1;
setposition:=350;
setvelocity:=175;
ELSIF y_positionread=350 THEN
execute2:=1;
setposition:=global.ylazer[50];
setvelocity:=175;
state:=1;
ELSIF state=1 AND y_positionread=global.ylazer[50]AND global.ylazer[50]>0 THEN
global.ydone:=1;
state:=0;
END_IF
ELSIF global.zhome=1 THEN//Z軸歸零,執行Y軸歸零運動
IF y_positionread=global.ylazer[50]THEN
execute2:=1;
setposition:=0;
setvelocity:=175;
ELSIF y_positionread=0 THEN//Y軸歸零運動完成,下使能
power:=0;
execute2:=0;
global.yhome:=1;
END_IF
END_IF
IF global.zhome=0 AND y_positionread>=200 AND j<=100 THEN//模擬掃描激光膜
global.ylazer[j]:=y_positionread;
j:=j+1;
ELSIF global.yhome=1 AND j<>1 THEN
j:=j-1;
global.ylazer[j]:=0;
END_IF
4 實驗結果與分析
通過Beckhoff公司的TwinCAT3軟件中的Visualization功能,在組態界面中插入輸入、輸出以及顯示控件,可以模擬實現充電的啟動和停止,并通過觀察四軸電機的運動速度、所在位置以及完成的狀態,判斷軟件的執行情況。運動仿真頁面圖如圖10所示。

圖10 運動仿真頁面
通過調用TwinCAT3軟件中的Measurement中的Scope YTNC功能,可實時觀察并記錄四軸電機的運動過程中的絕對位置、相對位置、速度、加速度、跟隨誤差,得知自動充電系統的對接過程和運動軌跡。
R軸電機的運動波形,如圖11所示,通過仿真模擬試驗,顯示R軸電機從0度轉動到90度,經歷了一次加速減速過程,最高轉動速度45°/s。

圖11 R軸電機運動波形圖
Y軸電機的運動波形,如圖12所示,Y軸電機四次加速減速,從位置0 mm運動到最大量程350 mm,最高線速度200 mm/s,其間掃描過車輛行駛上方向的反射膜,記錄對應的電機的位置,PC控制器計算出插座水平的中心點,又從350 mm處運動到插座水平中心點位置。
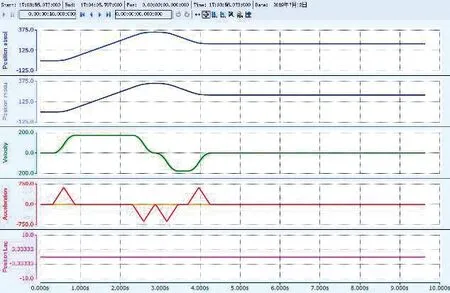
圖12 Y軸電機運動波形圖
Z軸電機的運動波形,如圖13所示,Z軸電機四次加速減速,從位置0 mm運動到最大量程350 mm,最高線速度200 mm/s,其間掃描過車輛垂直方向上的反射膜,記錄對應的電機位置,PC控制器計算出的插座垂直中心點,又從350 mm處運動到插座垂直中心點位置。

圖13 Z軸電機運動波形圖
X軸電機的運動波形,如圖14所示,X軸電機從0 mm轉動到600 mm位置處,經歷了一次加速減速過程,最高線速度300 mm/s,模擬將充電槍插入到充電插座中。至此整個過程完成了本文2.4節中的路徑規劃。
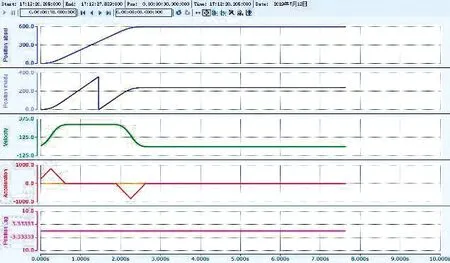
圖14 X軸電機運動波形圖
如圖15所示為自動充電裝置圖,此時R軸位于90°即充電狀態。如圖16、17所示,對接裝置除充電插頭接口外,在其左右兩側裝有兩個機械引導孔,與充電插頭上機械引導裝置對應,用于對充電樁插頭進行機械引導使充電插頭準確對接,最大可以容納±3.25 cm誤差。

圖15 自動充電樁成品圖

圖16 車載對接裝置接口圖

圖17 車載側對接裝置圖
5 結論
由仿真試驗可知,整個充電連接過程可以在5s內完成,實現對車輛上的充電插座的識別、定位、連接,系統響應速度較快。通過R軸電機的驅動實現了充電插頭的釋放及回收,提高了充電連接器的防護等級;Y軸電機的驅動解決了車輛行駛方向上駐車誤差影響,可接受最大350 mm偏差;Z軸電機的驅動解決了車輛負載以及車輛高度變化對充電連接的影響,可接受車輛0~350 mm的上下浮動變化;X軸電機的驅動解決了車輛距離充電裝置遠近的影響,可接受0~600 mm誤差范圍。通過以上四軸的運動,降低了對司機的泊車停靠要求,增強了自動充電系統的容忍性。在插槍充電系統的基礎上,基于PC控制技術開發的大功率自動直流充電裝置,可實現對超級電容巴士快速、精準的充電連接,最終達到無需人員參與,自動充電的目的。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
