引入新數據源的D-S 融合檢測方法
2021-12-02 06:41:48林水生衛伯言楊海芬朱磊基
電子科技大學學報 2021年6期
林水生,衛伯言,楊海芬*,熊 勇,朱磊基,于 良
(1. 電子科技大學信息與通信工程學院 成都 611731;2. 中國科學院上海微系統與信息技術研究所 上海 長寧區 201899)
隨著社會發展,城市人口愈發密集,火災發生數量逐年增加。火災造成財產損失和人員傷亡,給社會帶來不可估量的傷害,因此如何及時準確地探測火災至關重要。
傳統檢測火災的傳感器,使用了煙霧探測器。煙霧探測器根據探測原理可分為兩類:基于電離的探測器和基于光電的探測器。基于光電的煙霧探測器利用煙霧粒子影響光的散射來探測煙霧;基于電離的煙霧探測器則利用煙霧顆粒的存在會導致電極之間的電流下降來檢測煙霧。但是單一信號判別火災易受到環境影響,產生虛警,準確率不高。為了提升火災探測準確率,需要使用多傳感器探測火災,因此選取合適的探測數據源、合理融合多傳感器信息成為了探測火災的關鍵。
目前用于判別火災的數據源多來自CO 濃度、CO2濃度、煙霧濃度、溫濕度和光照強度。而融合多傳感器信息方法則多種多樣。如文獻[1-2]使用模糊邏輯融合溫度、火焰強度、煙霧濃度信息;文獻[3]使用模糊邏輯融合煙霧、溫度、濕度、CO濃度信息;文獻[4]先使用卡爾曼濾波對溫度、濕度和煙霧信息進行預處理,再通過模糊邏輯判別室外火災。模糊邏輯雖然可以模擬人的思考判斷方式,但是模糊規則多由人為經驗確定,不具有客觀性。文獻[5-6]使用反向傳播(back propagation, BP)神經網絡訓練CO、溫度和煙霧來提升火災探測準確率;文獻[7]使用卷積神經網絡(convolutional neural networks, CNN)訓練數據檢測火災,但是神經網絡需要大量的訓練數據,而火災數據不易采集。文獻[8-14]提出了基于圖像、視頻處理等方法檢測火災的方法,但是計算資源消耗過大,所用時間較長。文獻[15]使用D-S 證據理論融合溫度、煙霧和光照強度信息,并且規定沖突因子K小于閾值來判別火災;文獻[16]則單純使用D-S 證據理論融合溫度和煙霧濃度,但是D-S 證據理論沒有充分考慮證據之間的相互關系,容易造成信任悖論,產生不可能發生的情況或者與事實相反的情況。目前對于D-S 證據理論的改進,可分為3 類:1) 為數據源分配權重,對其改進[17-19];2) 對合成規則的改進[20-21];3) 既修改證據源,也改進合成規則[22]。
本文使用溫度、煙霧濃度、CO 濃度、O2濃度、熱釋放速率作為數據源,使用火災判別概率函數計算每個數據源對應的火災判別概率向量P,結合Jousselme 距離為各個數據源分配權重,最后通過D-S 證據理論對多傳感器判別信息融合,得到最終的火災判別概率。本方法充分考慮了各個信號之間的關系,仿真結果表明,在保證準確率的基礎上,可提前檢測出火災,有效提升火災探測及時性。
1 數據源選擇及其對火災判別
火災檢測信號的選擇對火災檢測至關重要。本文通過數據分析與多次仿真驗證對比確定火災探測信號,并且使用模糊邏輯隸屬度函數構建各個信號的火災判別概率函數。
1.1 數據源選擇
由于火災數據不易采集,本文采用軟件PyroSim仿真火災,模擬開放房間中沙發燃燒并且引燃整個房間的情景,選擇燃燒反應為WOOD_OAK,環境、燃燒速率等因素均設置為默認。其中,氣體濃度(PPM)單位為mol/mol,熱釋放速率(HRR)單位為kW/h,燃燒時間設定為600 s,包含從沒有火災到火災開始并最終結束的整個過程。各數據源的量化信號隨時間變化曲線如圖1 所示。
目前已有文獻中,用于判別火災的數據源多來自CO 濃度、CO2濃度、煙霧濃度、溫濕度、光照強度。而由圖1 可以看出,在火災發生過程中,因為燃燒反應產物等原因,會產生一定水分,所以水分并未大量減少。而CO2在實際環境中受到的影響因素較多,會對火災判別產生干擾;此外,火災發生過程中,光照強度的變化來自于煙霧濃度的變化。因而本文不選用常用的濕度、CO2濃度和光照強度作為數據源。
從圖1 可以看出,CO 濃度、煙霧濃度、溫度、O2濃度和熱釋放速率會隨著火災的發展趨勢而變化。圖2 給出了加入O2濃度和熱釋放速率相對于常規CO 濃度、煙霧濃度、溫度等判別火災的概率增益,可以看出加入O2濃度和熱釋放速率后對判斷火災發生和熄滅階段提升效果更為明顯。因此本文采取CO 濃度、煙霧濃度、溫度、O2濃度差值和熱釋放速率作為火災檢測數據源。

圖2 不同數據源仿真結果對比
1.2 數據源的火災判別概率函數
本文CO 濃度、煙霧濃度、溫度、O2濃度差值和熱釋放速率的火災判別概率函數的構建,采用模糊邏輯隸屬度函數方法[23],具體使用三角形與梯形結合的形式,將火災狀態分為:“無火”“陰燃火”“明火”3 種。經過試驗獲取,函數構造如圖3所示。將各數據源通過其對應的火災判別概率函數得到各自的火災判別概率向量P。

圖3 火災判別概率函數
2 D-S 證據理論融合多傳感器判別方法
2.1 D-S 證據理論算法基本構建
2.2 D-S 證據理論算法改進
針對經典D-S 證據理論沒有考慮證據之間的差異,引起信任悖論的現象,本文使用Jousselme 距離[24]評估證據源之間差異,進而為各個證據源分配權重。
首先,構建距離矩陣DM 如下:
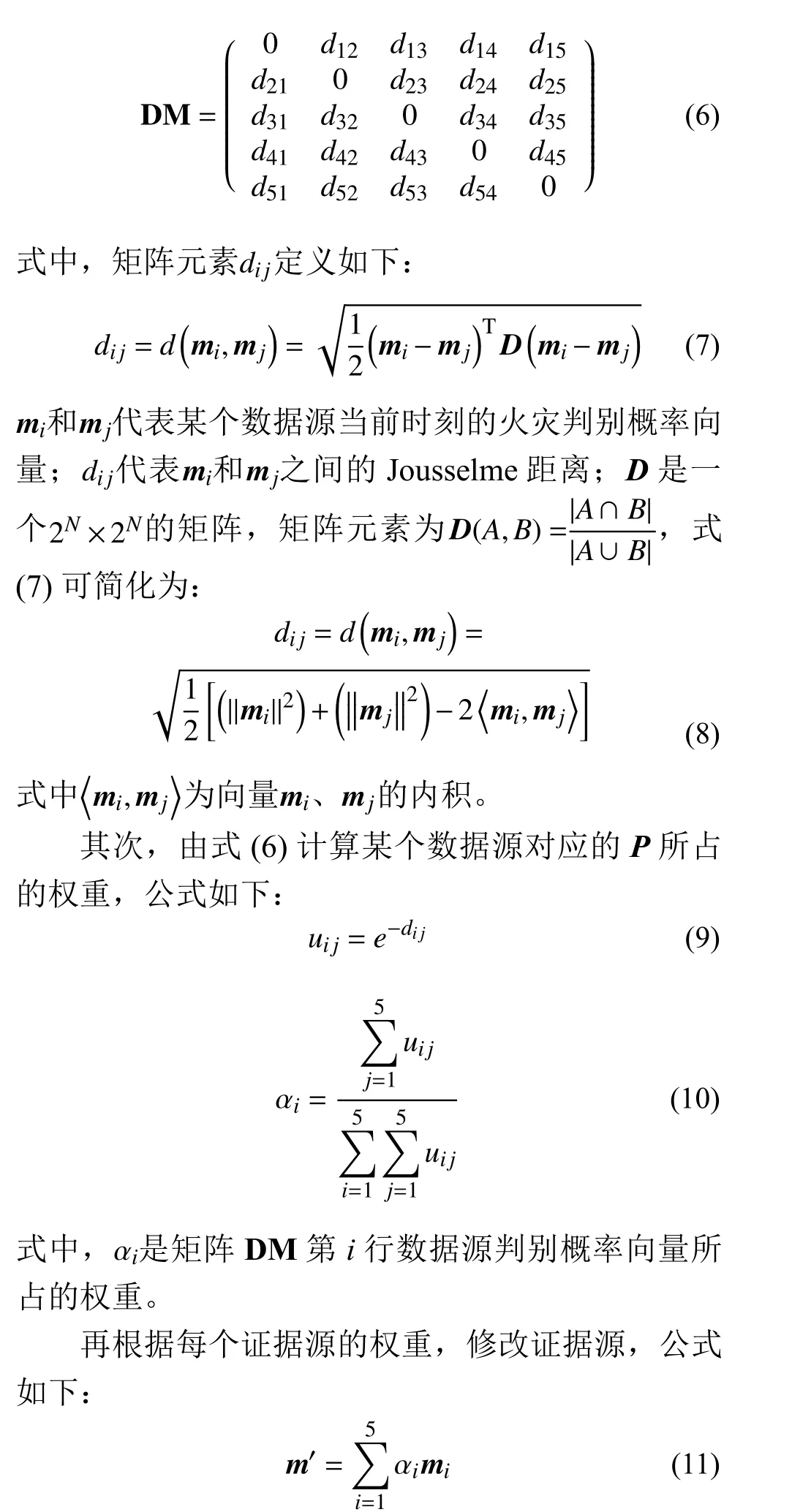
式中,mi是 每個數據源對應的判別概率向量;m′是各個證據源融合后的判別概率向量。
最后,對m′進行n-1 次D-S 證據理論融合,得到最終的判別概率P(Ii)。式(4)可簡化為:

具體算法如圖4 所示,過程如下:1)獲取5 種火災信號:CO 濃度、煙霧濃度、溫度、O2濃度差值和熱釋放速率,作為數據源;2) 將數據源通過圖3 火災判決概率函數,分別得到各個數據源的火災判別概率;3) 構建距離矩陣,通過式(6)~式(11)計算各個數據源權重并且修改證據源;4) 融合后的證據源進行4 次證據理論融合,得到最終火災發生概率;5) 將陰燃火和明火概率相加作為火災發生概率,若大于0.8,則判定為火災發生。
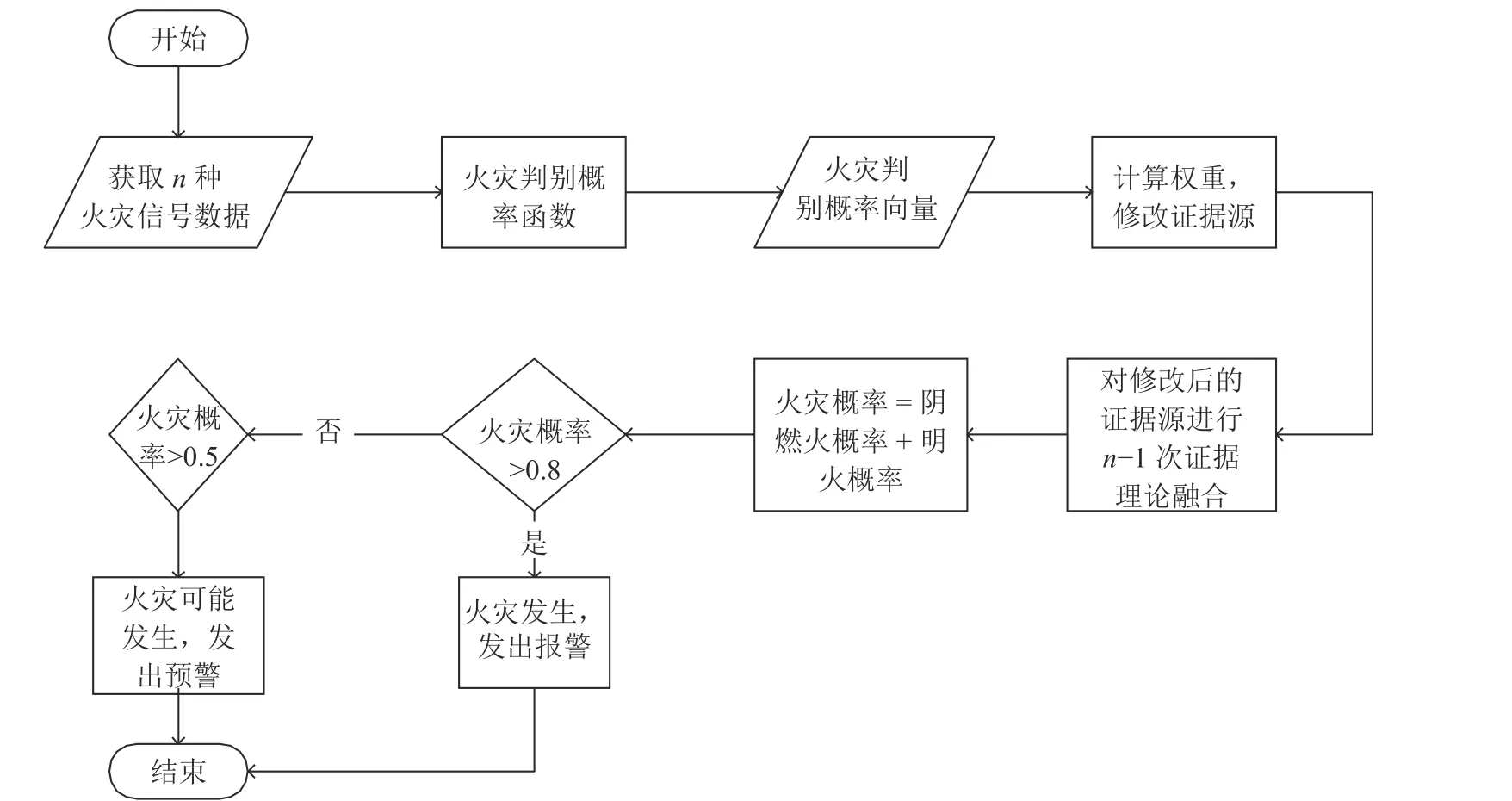
圖4 算法框圖
3 仿真及結果分析
3.1 仿真條件及結果
本文使用軟件PyroSim 仿真火災發生情況得到火災數據,后經Matlab 處理數據得到火災判別概率。仿真兩個燃燒場景來進行判別結果對比,采樣頻率為2 Hz。第一個場景模擬明火過程。開放房間內,上方沙發起火,然后燃燒整個房間至火災結束,其中火災發生時,火焰從沙發升起時間較短,并且發出明顯亮光,反應了火災發生時的明火現象。第二個場景模擬陰燃火過程。燃燒點先發出大量黑煙,之后產生火光。其余燃燒設置均為軟件默認。仿真中,假定將首次發出明顯亮光時刻作為火災起始時間,而將火焰熄滅時刻作為火災結束時間;算法中則將最終判別概率>0.8 時,判斷為火災發生。
經過仿真發現,僅使用D-S 證據理論算法[13]或加上歸一化因子K[12]融合CO 濃度、煙霧濃度、溫度判別,在某些時刻會產生0/0,即NaN 現象,無法檢測出火災,如圖5 所示。而通過計算Jousselme距離分配數據源權重可以解決此問題, 因此本文不再進行D-S 證據理論和本文算法的對比。僅比較使用本文算法與選取煙霧濃度、溫度、CO 濃度的方法,具體從陰燃火、明火兩種場景進行比較。仿真對比如下。
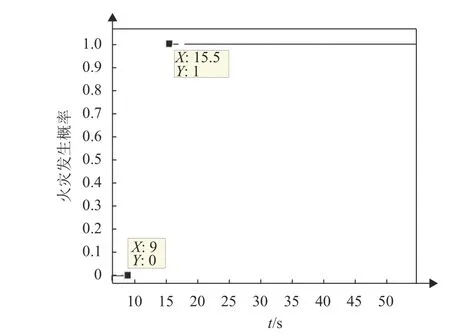
圖5 僅使用D-S 證據理論
場景①:明火場景場景
如圖6,該場景于3.7 s 出可以看到明顯亮光。算法仿真結果如圖7 所示,可以看出,本文方法在X=18,即t=9 s 處檢測出火災;早于對比方法在X=28,即t=14 s 處檢測出火災。
圖6 明火場景
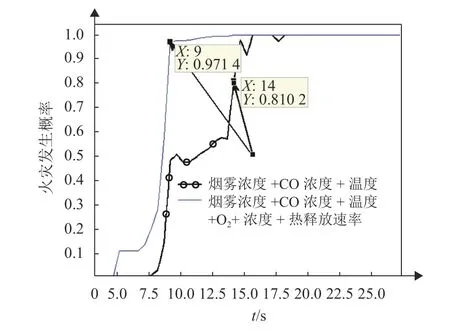
圖7 明火場景火災發生概率對比
場景②:陰燃火災場景
如圖8,該場景先大量散發煙霧,于17 s 處可看到火光。仿真結果如圖9 所示,可以看出,本文方法最早在X=34,即t=17 s 處檢測出火災;早于對比方法在X=41,即t=20.5 s 處檢測出火災。
圖8 陰燃火場景
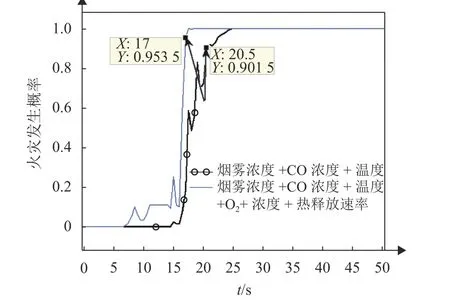
圖9 陰燃火場景火災發生概率對比
總之,在使用同樣Jousselme 距離改進D-S 證據理論方法情況下,本文方法相比于目前傳統方法,明火場景可提前5 s 檢測出來;陰燃火情況提前3.5 s 檢測出來。此外,本文方法還解決了文獻[12-13]在融合過程中產生的NaN 現象。
3.2 未能更早判別火災原因分析
本節分析了在火災發生初期,未能檢測出火災的原因。
情景①:由圖6 可以看出,該場景于3.7 s時,有明顯亮光;而由圖7 可以看出,本文方法在X=18,t=9 s,即延時5.3 s 才可檢測出火災。選取火災檢測信號CO 濃度、溫度、煙霧濃度、O2濃度以及熱釋放速率在0~30 s 的變化曲線,如圖10 所示。由圖可以看出:本場景的CO 濃度、煙霧濃度、溫度、O2濃度在X=12,t=6 s 之前,與初始濃度相比無變化,在t=6 s 之后開始逐漸增長;熱釋放速率于X=8,t=4 s 之后開始增長。
分析其原因,火災信號的變化需要一定時間,在火災發生初期,信號變化緩慢,數值較小,經過對應火災判別概率函數,得到陰燃火概率與明火概率較小,因此不能檢測火災發生。經過一定時間積累,檢測信號發生明顯變化,才可檢測出火災。故而需要一定延時方可檢測出火災。
情景②:同樣的選取火災檢測信號0~30 s 的變化曲線,如圖11 所示。由圖8 可知,該場景在17 s時,有明顯亮光;而圖8 顯示本文方法在X=34,t=17 s,檢測出火災,即該場景在火光發生時可以準確檢測。分析其原因,由圖10 可以看出:本場景的CO 濃度、煙霧濃度、溫度、O2濃度、熱釋放速率在X=34,t=17 s 時,檢測信號已有明顯變化,數值較大,通過對應火災判別概率函數,得到陰燃火概率與明火概率較大,因此可以檢測火災發生。

圖10 場景①:信號隨時間變化
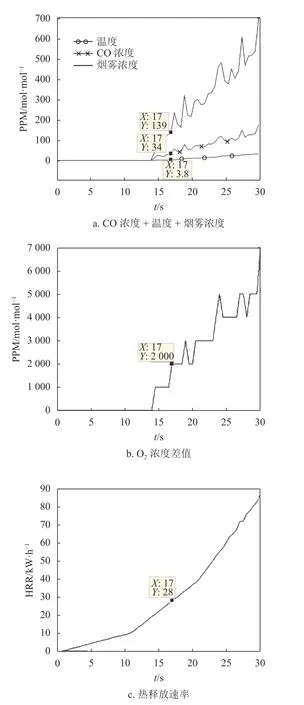
圖11 場景②:信號隨時間變化
4 結 束 語
本文針對目前火災檢測性能的不足,引入新的火災探測數據源,研究了將模糊邏輯和D-S 證據理論融合應用于火災探測的方法,避免了單純使用信號閾值判別火災易造成誤判的缺陷。同時綜合考慮溫度、煙霧濃度、CO 濃度、O2濃度與環境初始濃度差值、以及熱釋放速率等信息,彌補了單一傳感器判別易受外界影響、造成虛警的不足。仿真結果表明,本文方法提前了火災探測時間,提升了火災探測及時性。
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(2021年19期)2022-01-12 06:16:36
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
無線電工程(2020年11期)2020-10-29 01:25:46
