基于目標層速度掃描的縫洞成像技術研究
2021-12-01 12:23:30鄧光校段心標馬永強馬靈偉
石油物探 2021年6期
關鍵詞:模型
鄧光校,段心標,王 震,馬永強,馬靈偉
(1.中國地質大學(武漢)地球物理與空間信息學院、湖北省地下多尺度成像重點實驗室,湖北武漢430074;2.中國石油化工股份有限公司西北油田分公司,新疆烏魯木齊830011;3.中國石油化工股份有限公司石油物探技術研究院,江蘇南京211103)
碳酸鹽巖縫洞型油氣藏具有埋藏深、非均質性強等特點[1-3],溶洞體在地震成像剖面上表現為“串珠狀”特征。王小衛等[4]和胡鵬飛[5]從資料處理的角度總結了碳酸鹽巖縫洞儲集體成像的處理技術和手段,指出速度建模精度是制約縫洞儲集體“串珠”成像的重要因素。李鵬飛等[6]利用小尺度的網格層析速度建模策略,提高了碳酸鹽巖儲層速度建模精度,改善了縫洞體成像效果。崔永福等[7]將全波形反演技術應用于縫洞型儲層探區的速度建模,提高了火成巖建模精度,間接改善了深部縫洞儲層的成像質量。由于縫洞儲層埋藏深,常規采集資料無法滿足全波形反演對排列長度的要求,因此目前未見全波形反演應用于縫洞儲層精細速度建模的公開文獻。目前主要采用網格層析反演建模技術進行縫洞成像速度建模[8-10]。
利用基于成像道集拉平準則的網格層析建模技術,只能反演得到低波數的背景速度場,無法精細刻畫實際地下介質的非均質特征。對縫洞儲層速度建模而言,質控時主要考慮大、中尺度“串珠”收斂程度,往往忽略了對速度更敏感的小尺度縫洞體的成像質量,最終反演得到的速度模型難以使所有縫洞儲集體成像收斂效果最佳。對于縫洞精細開發而言,大尺度縫洞不再是關注點,收斂效果不佳或未收斂的小尺度縫洞體更為重要,因此通過速度模型更新提高局部小尺度串珠的成像質量具有較強的實際意義。王世星等[11]提出了一種基于連續速度替換的時間域地震聚焦成像技術,該技術采用偏移速度連續替換掃描和縫洞體反射能量聚焦分析兩種方法,調整縫洞體位置處的時間域偏移速度并完成疊前時間偏移成像處理,提高了時間域縫洞體成像質量。
本文首先基于風化殼模型數據對比不同速度誤差對深度域成像質量的影響,分析成像剖面、成像道集與速度精度的敏感性關系,進而提出了基于目標區速度掃描的深度域縫洞成像方法,再對比Kirchhoff積分偏移、單程波偏移和逆時偏移的特征,優選了一種單程波偏移成像方案,并給出了目標區速度掃描單程波偏移成像技術流程,最后將其應用于塔河某實際資料處理,證明了本文方法的可行性和有效性。
1 不同速度風化殼縫洞成像分析
為了分析速度模型對縫洞成像精度的影響,設計了如圖1所示的風化殼縫洞體速度模型。該模型包括隨機分布的2~10m小尺度溶洞、20~50m中尺度孤立溶洞和100~200m大尺度孤立溶洞。溶洞體填充速度為4500~5000m/s,圍巖速度為6100m/s。正演模擬參數與塔河實際采集參數基本一致,炮間距30m,道間距30m,采樣記錄長度7s,采樣間隔1ms,地震子波主頻30Hz。
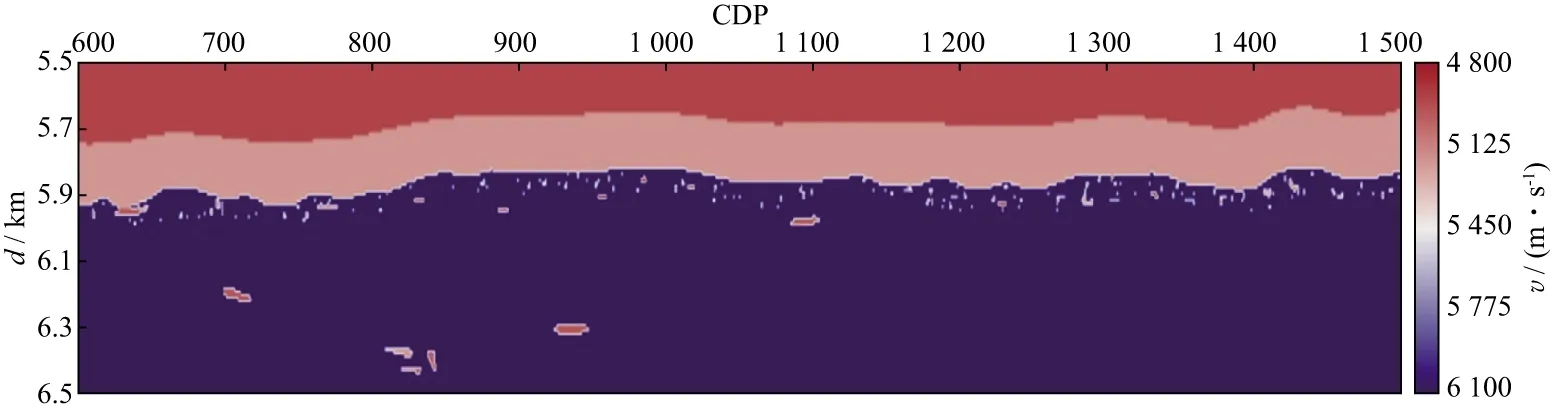
圖1 風化殼縫洞體速度模型
圖2是利用準確速度模型進行逆時偏移(reverse time migration,RTM)獲得的成像結果。由圖2可見,大、中尺度溶洞均表現為明顯的“串珠”狀特征,小尺度溶洞則表現為弱反射特征,影響了風化殼頂面同相軸的下部分旁瓣,但整體而言,大、中尺度溶洞“串珠”收斂效果好,小尺度溶洞成像質量高。
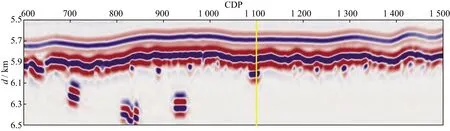
圖2 準確模型的逆時偏移(RTM)成像結果
圖3給出了不同偏移速度模型對溶洞進行逆時偏移的成像結果,圖3a至圖3d的偏移速度依次為準確速度的99.0%,101.0%,99.5%和100.5%。圖中“串珠”形態圓潤、無上翹或下拉的“尾巴”時表示縫洞收斂最佳;“串珠”邊緣有下拉“尾巴”表示偏移不足(圖3a和圖3c);“串珠”邊緣有上翹“尾巴”表示偏移過度(圖3b 和圖3d)。由圖3可知,當速度誤差為1%時,“串珠”收斂質量很差,當速度誤差為0.5%時,“串珠”收斂質量與準確模型“串珠”成像結果相差較大。由圖3a和圖3c可見,當偏移速度模型小于準確速度模型時,小尺度溶洞表現為雜亂反射特征;由圖3b 和圖3d可見,當偏移速度模型大于準確速度模型時,溶洞成像表現為過偏移,風化殼頂面同相軸的上部分旁瓣出現一系列能量異常。由此可見,“串珠”成像質量對速度模型精度非常敏感,速度誤差即便為0.5%,依然會影響“串珠”成像的收斂效果。
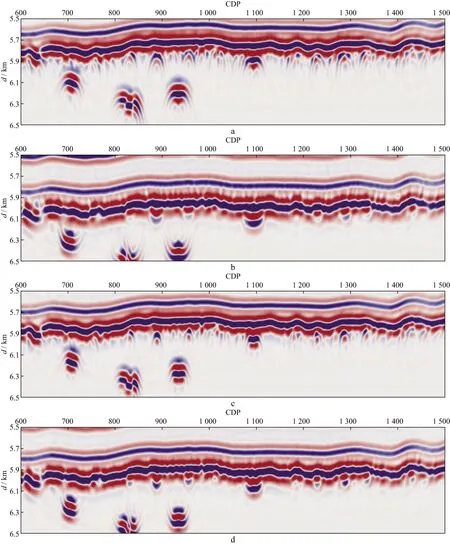
圖3 不同偏移速度模型的逆時偏移(RTM)成像結果a 99.0%; b 101.0%; c 99.5%; d 100.5%
速度建模基于成像道集拉平準則,速度更新依賴于成像道集的剩余時差。我們提取圖2黃色線位置處(CDP點號為1100)不同偏移速度的成像道集,結果如圖4所示,圖4中與黃色水平直線重合的同相軸對應風化殼頂面,其下方的同相軸對應“串珠”,圖4中兩個道集的同相軸都很平,當速度誤差為0.5%時,成像道集剩余時差非常小,此時無法利用剩余時差更新速度模型。分析可知,塔河縫洞體成像時若要獲得精確的背景速度模型使“串珠”成像完全收斂非常困難。此外,由于縫洞儲層非均質性強,速度橫向差異大,故很難使所有“串珠”均能準確成像并收斂。
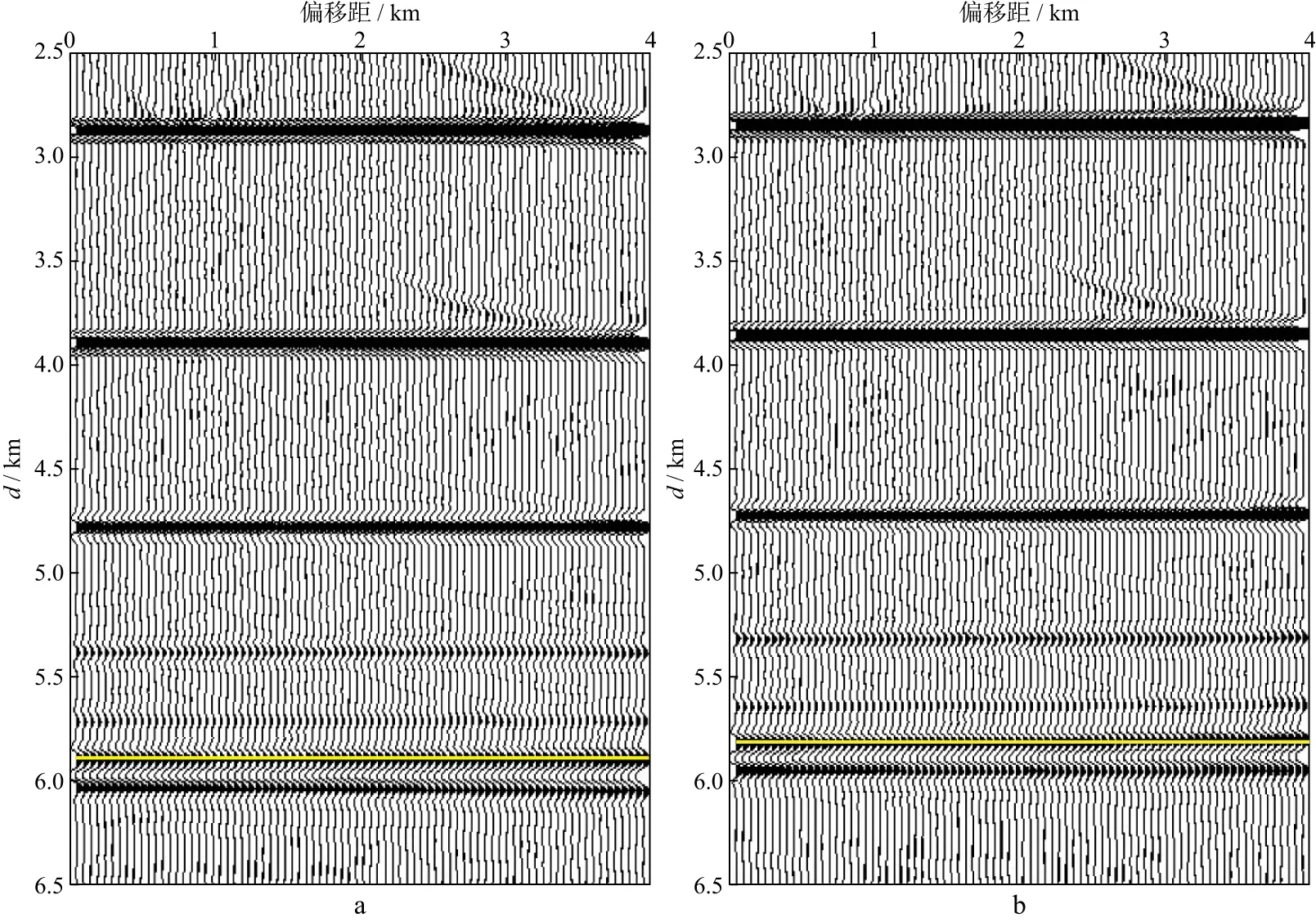
圖4 不同偏移速度的成像道集a 整體偏移速度為準確速度; b 整體偏移速度為準確速度的99.5%
2 目標區速度掃描成像方法
對于縫洞地震資料而言,奧陶系碳酸鹽巖地層非均質強、速度模型復雜,而其上覆地層層狀沉積特征明顯、速度相對簡單。實際勘探中,假設影響“串珠”收斂的主要因素是儲層速度建模精度,通常認為利用層析反演速度建模能夠獲得較高精度的上覆地層速度模型。基于上述假設,考慮到速度誤差嚴重制約“串珠”成像質量,我們難以獲得精確的速度模型,為此可以在深度上選定一個包含縫洞儲層的目標區,在目標區范圍內為層析反演速度模型選定一系列誤差百分比,利用不同的偏移速度進行偏移成像,最終從多個偏移成像結果中尋找不同位置的“串珠”收斂最佳的結果。
由于掃描速度體數量通常比較多,因此偏移方法必須計算效率高,本文基于以下3個因素考慮選擇單程波波動方程疊前深度偏移方法[12-16]:①單程波偏移成像精度高,能夠適應橫向變速介質成像,對于構造形態復雜程度不高的縫洞探區而言,其成像效果與逆時偏移基本相當,且效果明顯優于Kirchhoff積分偏移方法;②單程波偏移計算效率高,比逆時偏移速度高5倍左右,其計算效率也優于Kirchhoff積分偏移方法;③單程波偏移沿著深度方向進行波場延拓和成像,在目標區深度以上速度精確的情況下,可以將波場延拓到目標區上方,再對目標區進行不同速度的速度掃描和偏移成像,整體計算量較小,而逆時偏移需要利用整體速度場進行波場傳播,Kirchhoff積分偏移射線追蹤時需要利用目標區以上的速度場,二者均無法快速進行目標區速度掃描成像。
單程波波場傳播方程為:
(1)
式中:U(x,y,z;t)表示地下一點t時刻的地震波場;v(x,y,z)表示地下一點的介質速度。本文波場延拓時采用分步傅里葉算子(split-step Fourier,SSF),每步波場延拓包含頻率波數域的相移和頻率空間域的時移,表示如下:

(2)

(3)
基于單程波方程的目標區速度掃描成像流程如下:①給定目標區深度范圍D1~D2,在D1以上逐層進行震源波場、記錄波場延拓和相關成像,保存延拓到D1的兩個波場;②在目標區范圍內,將速度乘以掃描百分比,從D1到D2逐層進行震源波場、記錄波場延拓和相關成像;③在D2深度成像后,再取之前延拓到D1深度的兩個波場,按其它速度掃描比例再次從D1到D2逐層進行震源波場、記錄波場延拓和相關成像。具體流程見圖5。
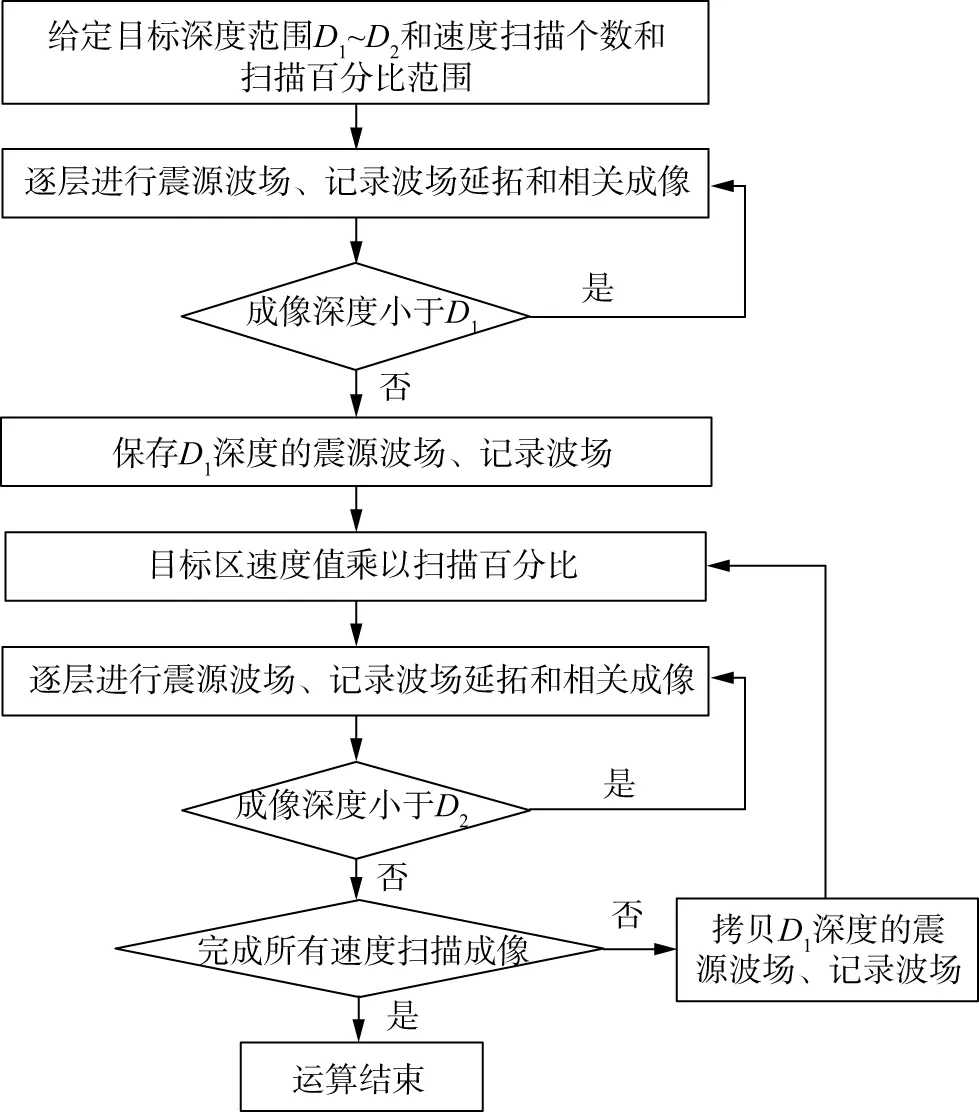
圖5 目標區速度掃描成像流程
3 應用實例
塔河油田某探區風化殼巖溶縫洞發育,隨著精細勘探開發的不斷深入,依靠大“串珠”開展井位部署的空間越來越受限,不足以滿足塔河的穩產上產需求。為了探索小尺度縫洞體成像,選擇該探區進行試驗。地震數據共33000炮,數據量為2.1TB,面元大小為15m×15m。利用網格層析速度反演技術,獲得如圖6 所示的速度模型。由圖6可見,速度場整體較為平滑,速度橫向變化不大。根據風化殼成像要求,將目標區深度設置為5.0~7.0km。進行速度掃描測試,將局部目標區速度掃描范圍設定為網格層析速度的97.0%~103.0%,即局部誤差為±3%(前述數學模型分析時采用的是整體誤差),掃描個數為11,頻率范圍2~70Hz,深度間隔10m,利用40個節點120個K10GPU卡完成全部偏移計算,耗時40.5h。

圖6 網格層析反演速度模型
圖7為目標區某條測線不同百分比速度掃描偏移成像剖面。由圖7a至圖7k發現“串珠”從欠偏移到過偏移的整個變化過程。圖7f是網格層析原始速度成像剖面,其中綠色圈范圍內“串珠”邊緣略有上翹,表示略微過收斂,說明速度值略大,而黃色圈范圍內“串珠”明顯欠收斂,表明速度值偏低。利用97.0%速度掃描偏移成像時(圖7a),綠色圈對應范圍內的“串珠”收斂效果變好。當速度掃描百分比超過101.2%后(圖7h),隨著速度值的增大,黃色圈對應范圍內的“串珠”成像效果逐漸變好,速度掃描百分比為103.0%時,成像質量明顯優于原始速度的成像效果。對比圖7f與圖7k可見,風化殼內的小串珠成像質量明顯提高,部分原收斂質量較差或未收斂的小“串珠”已較好地收斂歸位,風化殼內的異常特征明顯。由上述結果可知,目標區速度掃描偏移成像方法對于識別小尺度縫洞體具有重要的實際應用價值。
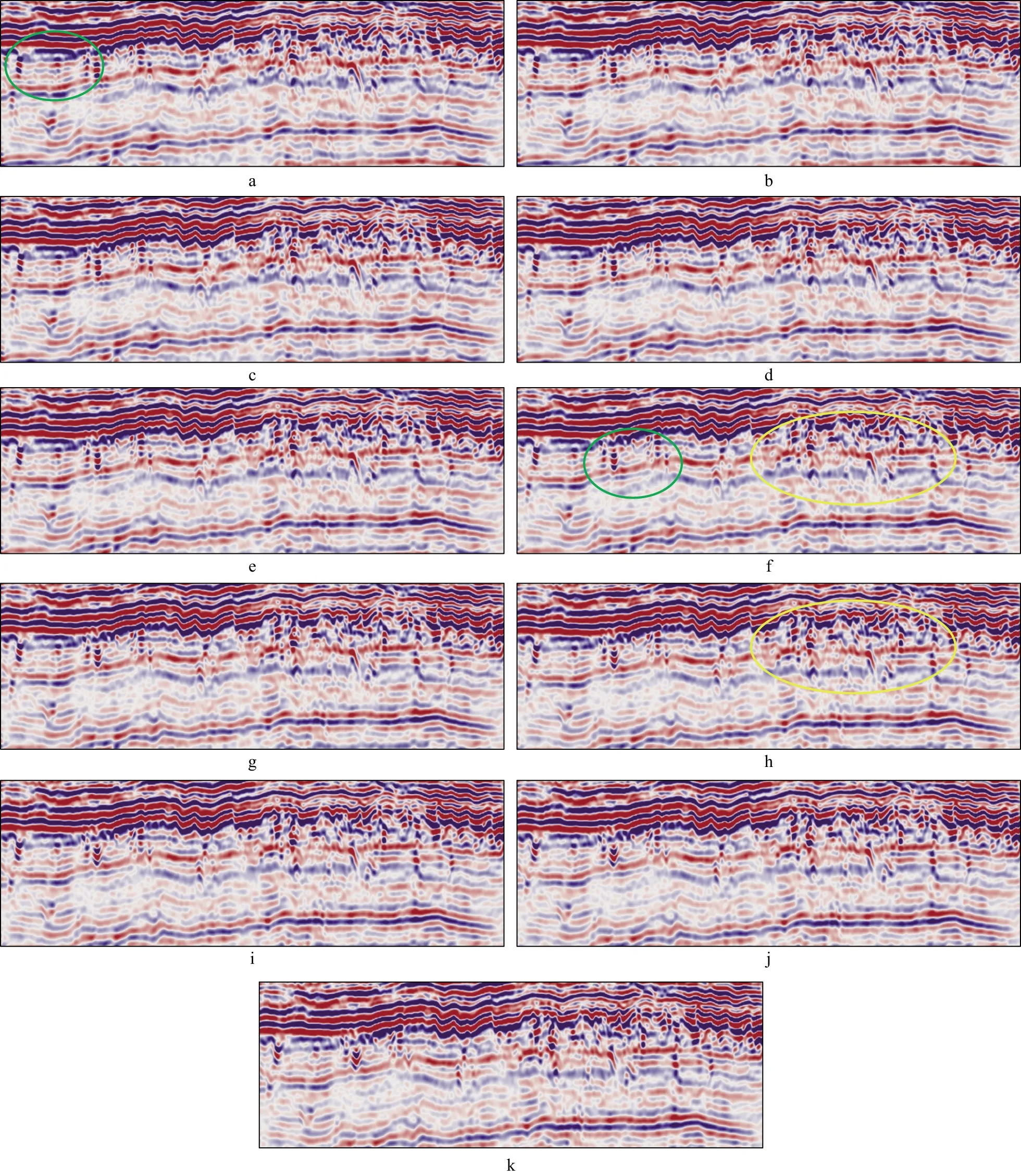
圖7 目標區某條測線不同百分比速度掃描偏移成像剖面a 97.0%; b 97.6%; c 98.2%; d 98.8%; e 99.4%; f 100.0%; g 100.6%; h 101.2%; i 101.8%; j 102.4%; k 103.0%
本文方法提供了一系列成像結果,其中某個結果中部分“串珠”聚焦性更好,但部分“串珠”聚焦形態可能變差。如何從一系列成像結果中構建一個使得全部“串珠”都最佳收斂的速度模型,仍有待進一步研究。
4 結束語
碳酸鹽巖縫洞成像效果依賴于速度模型精度,“串珠”成像質量對速度變化非常敏感。目前,基于成像道集拉平準則的層析反演速度建模技術通常只能反演得到低波數的背景速度場,無法精細刻畫縫洞儲層速度特征,難以實現不同尺度“串珠”的完全收斂。本文提出了一種基于目標區速度掃描的單程波波動方程疊前深度偏移方法,該方法基于目標區上覆地層速度模型精度較高的假設,將震源波場和記錄波場延拓到目標區上方,利用不同百分比速度掃描逐次對目標區進行偏移成像,得到一系列目標區不同速度的成像結果,可用于提高部分“串珠”成像收斂精度。在塔河某探區的實際應用結果表明,本文方法可使原收斂質量較差或未收斂的小溶洞形成的“串珠”較好地收斂,在一定程度上提高了小溶洞“串珠”的識別能力。
從一系列地震成像剖面中選擇合適的局部成像結果比較困難。我們下一步將研究自動化的“串珠”最佳收斂判別方法,以及如何得到每一個串珠都能最佳收斂的速度模型,利用該速度模型再次進行疊前深度偏移,最終可獲得整體最佳收斂的成像結果,以進一步提升本文方法的實用性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19