數控車床自動上下料機械手結構設計 Structural Design of CNC Lathe
2021-11-30 00:42:46潘寧PANNing
內燃機與配件 2021年22期
潘寧 PAN Ning




摘要:本課題針對于數控車床而設計了結構圓柱坐標型的自動上下料機械手,通過對機械手的傳動機構,驅動系統、液壓系統以及控制系統進行了理論分析和計算。同時對機械手整體結構進行了詳細的設計,主要包括機械手的機身機座,機械手手臂,機械手手爪等部分。并分析了數控車床自動上下料機械手的操作流程,主要采用液壓缸、步進電機等元件實現機械手的運動部分。
Abstract: The automatic cylindrical manipulator is designed for CNC lathe, including the drive system, hydraulic system and control system.At the same time, the overall structure of the manipulator is detailed designed, mainly including the robot fuselage seat, manipulator arm, robot hand claws and other parts.The operation process of automatic CNC lathe is analyzed, mainly using hydraulic cylinder, stepping motor and other components to realize the manipulator movement part.
關鍵詞:數控車床;機械手;傳動機構;液壓系統;驅動系統
Key words: CNC lathe;manipulator;drive mechanism;hydraulic system;drive system
中圖分類號:TG506.9? ? ? ? ? ? ? ? ? ? ?文獻標識碼:A? ? ? ? ? ? ? ? ? ? 文章編號:1674-957X(2021)22-0083-02
1? 數控車床自動上下料機械手的設計方案
1.1 機械手結構的設計
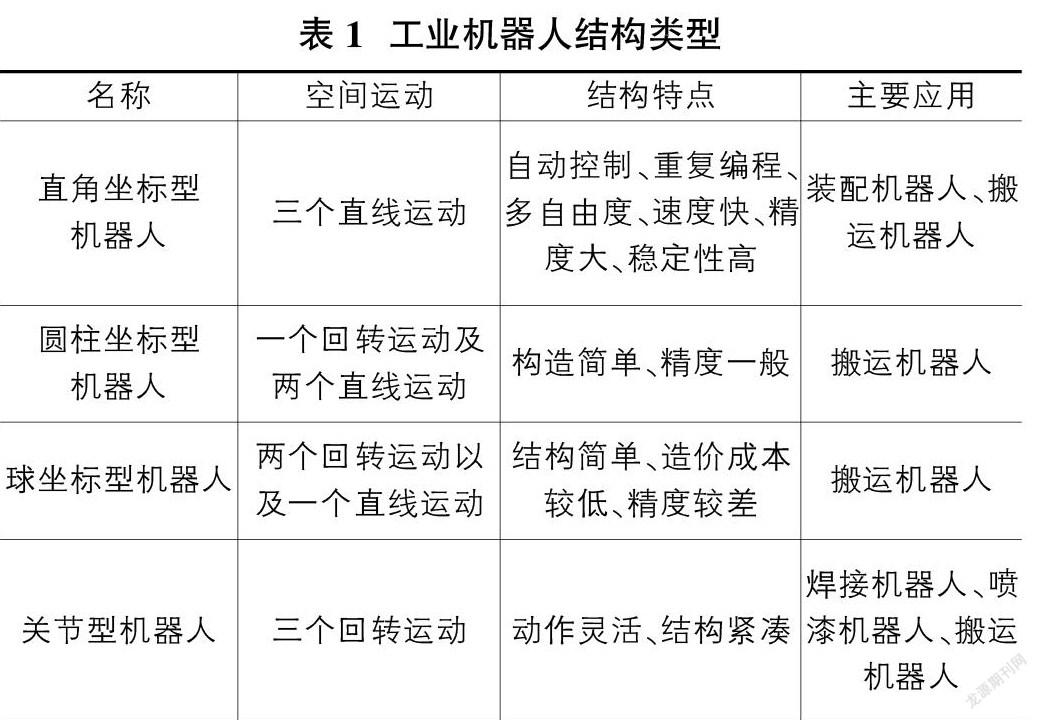
工業機器人的結構形式主要包括直角坐標型機器人、圓柱坐標型機器人、球坐標型機器人、關節型坐標機器人四種[8]。其對應的特點如表1。
1.2 數控車床自動上下料機械手手部設計
1.2.1 機械手手部的設計要求? 本課題機械手手爪開閉范圍需夠大。在機械手工作時,其中一個手爪張開夾緊角度的最大變化量為開閉范圍。手爪開閉范圍的要求與工件的形狀以及尺寸等因素都有關聯。通常情況下,機械手手爪的開閉范圍越大越好。
1.2.2 手爪結構的采用方案? 結合具體的工作要求,綜上所述,本課題采用的是齒輪齒條式。通過活塞往返帶動齒條完成手爪張開或夾緊的動作。
1.3 數控車床自動上下料機械手腕部設計
機械手手腕主要功能是可以使被夾持工件的方位產生變化,此時機械手手腕需做回轉運動,即只存在一個回轉自由度。結合本課題,本設計手腕不加自由度以便于機械手結構簡單,操作簡單。
1.4 數控車床自動上下料機械手手臂設計
考慮到操縱器在工作中的穩定性和安全性,將兩個平行的導向桿添加到該對象的水平框架中,使其與運動活塞桿截面形成等腰三角形結構,以保證其結構更加穩定牢靠。垂直手臂添加四個導桿其截面為正四邊形,每個導桿都選用空心結構以保證機械手整體重量。添加此導桿結構主要原因是可以保證機械手整體穩定。
2? 數控車床自動上下料機械手驅動系統設計
2.1 驅動系統采用方案
具體到本設計,綜合考慮以上因素,本課題機械手機座為回轉運動,采用步進電機驅動最優,機械手水平手臂和垂直手臂選用液壓驅動最優。
2.2 數控車床自動上下料機械手傳動設計
本課題中機械手手臂運動均采用液壓驅動。故該部分不采用傳動結構,即簡化了機械手結構,也有利于提高機械手整體的精度。本課題機械手機座部分選擇了電機驅動,則需要通過傳動機構進行減速。經分析比較,本課題選擇圓柱齒輪傳動。
2.3 數控車床自動上下料機械手定位與穩定性設計
2.3.1 影響定位精度及平衡的因素? 定位方式、速度、剛度、運動件重量以及驅動源等因素對機械手整體的平衡以及穩定都會產生一定影響。如定位方式選擇機械擋塊定位,其擋塊的強度以及與擋塊碰撞時速度的大小等都有關聯。速度對定位精度也有較大影響如,速度過快或過慢都會影響最終精度,所以控制其速度可以適當減小最后的精度誤差。
剛度對機械手整體結構的影響在于如接觸剛度較低,易振動,此時定位精度一般較低。
運動件重量對定位精度的影響在于如運動件重量變大時,定位精度會相應減小,機械手整體以及被夾持工件均屬于運動件。合理控制運動件本重量以及機械手工作時被夾持工件重量是必要的。
驅動源包括液壓、氣壓、電壓、油溫等。驅動源產生變化時,重復定位精度會隨之產生變化。所以穩壓及控制油溫是重要的。
結合上述因素,本設計最終采用的定位方式為機械擋塊定位。
2.3.2 平衡機構分類? 彈簧平衡機構,活塞推桿平衡機構,配重平衡機構三類為目前工業機器人常用的三種平衡機構的形式[12]。
彈簧平衡機構有結構簡單、成本低、穩定性好等特點,應用較為廣泛。
活塞推桿平衡機構分為液壓和氣動兩種,兩種均具有較好的阻尼作用,但液壓平衡系統體積較小,氣動平衡系統體積較大。活塞式平衡系統復雜,價格較高,裝卸及維修難度也較高,但是平衡效果較好。一般用于配重平衡、彈簧平衡滿足不了工作要求的場合[13]。
配重平衡機構平衡效果一般,但其機構簡單,較為穩定。
2.3.3 平衡機構采用方案? 本課題選擇通過合理設計結構以保證手臂本身達到平衡。因在設計機械手手臂結構以及整個機械手設計和布局的過程中已著重考慮了機械手手臂的平衡問題,為使機械手整體結構簡單,故不采用平衡機構。
3? 理性分析計算以及主要參數確定
3.1 液壓源系統的設計? 本課題的液壓系統選擇定量泵供油,為了保證液壓油無雜質摻進,選擇在油泵入口添加粗過濾器,在其的出口安裝精過濾器凈化。本課題的液壓傳動系統,其中包括垂直手臂的升降,水平手臂的伸縮,以及機械手手爪的張開閉合三個執行機構。
3.2 液壓傳動系統參數確定? 液壓傳動系統的參數包括壓力和流量。壓力取決于外載荷,流量決定于液壓執行元件的運動速度和結構尺寸。機械手手爪、水平手臂、垂直手臂液壓缸參數見表2、表3 以及表4。
3.3 電機選型? 根據計算結果,綜合考慮各種因素,通過查閱《機械手冊》,最終本課題選用型號為110BYG550B-SAKRMA-0301的步進電機,此電機轉矩較高,振動較低,綜合性能較好。該電機技術參數見表5。
4? 數控車床自動上下料機械手控制系統設計
4.1 機械手的工作流程
本文機械手工作方式包含四種,經歸納整理依次是:復位、自動、手動、半自動,前文已有詳細介紹,四者均有其獨特特征。
復位操作重點面向任務執行前或故障解決后,不但把現下所有工作準確移到原點,而且屬于各部件運動基準。
自動即機械手先獲得生產線指令,再由總控制臺操作下執行具體任務。控制系統保持聯線情況下,工作開關必須到達“自動”處,這種情況下,所得指令信號由自動生產線提供。
機械操作階段不可避免因某方面情況造成故障發生,或調試階段均依賴手動方式來實現,屬于不可或缺重要方式。“手動”位系統保持離線模式,僅僅接收控制面板下達指令,無法獲得其余信號。機械實際運轉前,所有部位均處于原位待命,一旦選擇手動相關按鍵,就會執行對應操作,若想停止操作,只需重新選擇一次。此時只能接收急停信號,換言之,其余信號全部無效。
4.2 數控車床自動上下料機械手操作面板
本課題理想操作面板如圖1所示。工作方式分為手動與自動。
自動:機械手獲得生產線指令后,利用總控制臺開始作業。基于控制面板設置成開關在“自動”位情況下,系統保持聯動模式,僅接收自動生產線指令信號。
手動:具體用在總控制臺發生故障、進行調試或其余一些必須手動執行情況下。設置成“手動”位,系統保持離線模式,無法接收自動生產線信號,僅僅接收控制面板指令。開啟這種方式,而且所有部位保持原位,所有電機保持停機后,由控制面板選擇升/降、前/后移、夾/放按鍵,可開始對應動作,然后繼續選擇對應按鍵,就能結束動作。再者,只有急停信號有效,其余信號將全部無效。
5? 結論
本文針對機械手設計過程中的關鍵問題展開研究,給出一些優化方案,包括:系統抗干擾能力的提升,讀、寫、事件響應時間的精準控制問題等。伴隨科技的進一步發展,機械手技術的發展勢必朝更專業化、復雜化、可重構化的角度發展,表現出更強的靈活性和更多元的控制方式。因此,PLC控制還將有眾多問題亟等解決,整體來講,數控上下料手臂在機械手開發中還有著極大的提升空間。
參考文獻:
[1]李海雁.氣動在機械手中的應用[J].中國高新技術企業, 2014(19):39-40.
[2]王軍義.淺談利用PLC控制自動機械裝[J].卷宗,2014(6):302.
[3]武帥.數控機床上下料機械手設計的目的和發現趨勢[J]. 環球市場,2018(002):379.
[4]袁川來,胡燦,楊劍波.基于液壓驅動的數控機床上下料機械手的設計與研究[J].湖南工業大學學報,2014,028(003):20-23.
[5]王相如.淺析工業機械手的定位平穩性與運動緩沖[J].科技致富向導,2011(11):416,384.
猜你喜歡
制造技術與機床(2019年12期)2020-01-06 03:17:48
制造技術與機床(2017年4期)2017-06-22 11:18:05
東方教育(2016年3期)2016-12-14 20:51:31
中國教育技術裝備(2016年20期)2016-12-12 10:03:08
企業技術開發·中旬刊(2016年10期)2016-11-12 16:11:54
大學教育(2016年9期)2016-10-09 08:45:14
科技視界(2016年20期)2016-09-29 11:42:34
制造技術與機床(2015年10期)2015-04-09 07:05:42
裝備機械(2015年1期)2015-02-28 22:19:52
機械職業教育(2014年9期)2014-02-28 02:09:18
- 內燃機與配件的其它文章
- VR在“1+X”工業機器人操作與運維培訓中的應用 Application of VR in Operation and Maintenance Training of "1+X" Industrial Robot
- 《工業機器人操作與編程》項目化教學設計 Project Teaching Design of Industrial Robot Operation and Programming
- 船舶輪機系統虛擬仿真實驗平臺建設 Construction of Virtual Simulation Experiment Platform for Marine Engineering System
- 探析機械零件數控車削加工理實一體化課程開發 Development of the Integrated Course of NC Turning of Mechanical Parts
- 汽車檢修實訓臺架與教學任務匹配研究 Study on Matching of Automobile Maintenance Training Platform and Teaching Task
- 汽車運用與維修專業現代學徒制崗位職業能力探析 An Analysis of Vocational Ability of Modern Apprenticeship in Automobile Application and Maintenance