基于大數(shù)據(jù)的城市短時交通流預測方法研究
2021-11-30 19:26:29黃政
科技風 2021年32期
關鍵詞:深度學習

摘要:短時交通流預測是城市智能交通系統(tǒng)的重要組成部分,隨著交通大數(shù)據(jù)和智能科學的快速發(fā)展,深度學習在交通領域得到了廣泛的應用。本文以門控循環(huán)單元神經(jīng)網(wǎng)絡GRU短時交通流預測模型為研究對象,采用加州交通局績效評估系統(tǒng)的交通流數(shù)據(jù)為例,將道路觀測點的交通流序列作為輸入,利用GRU實現(xiàn)城市短時交通流量的預測,并與SVR、ARIMA等模型進行對比,結果表明,該預測模型具有良好的預測性能,可為城市區(qū)域短時交通流量變化監(jiān)測提供依據(jù)。
關鍵詞:交通流預測;交通大數(shù)據(jù);深度學習;門控循環(huán)單元神經(jīng)網(wǎng)絡
1緒論
城市道路短時交通流預測是智能交通系統(tǒng)實現(xiàn)交通誘導和交通控制的關鍵部分,精準的短時交通流預測可為其提供及時和有價值的參考信息。交通流預測是通過大量歷史數(shù)據(jù)或實時采集的交通數(shù)據(jù)科學預測未來時刻的道路交通狀況,短時交通流預測通常是對未來5~15分鐘內的交通流量進行循環(huán)預測,為道路使用者和運輸從業(yè)者提供更優(yōu)的出行路徑,減少交通擁堵,提高道路的安全性和通行效率。
目前,短時交通流的預測方法主要有數(shù)理建模法和數(shù)據(jù)驅動法。數(shù)理建模法主要有時間序列模型、混沌理論模型以及卡爾曼方程等。文獻[3]提出以季節(jié)為周期的自回歸滑動平均模型交通流短期預測,利用大量歷史相關數(shù)據(jù)開展參數(shù)估計實現(xiàn)預測的目的。文獻[4]首先應用方差優(yōu)化速度預測,采用卡爾曼濾波交通預測模型,在所測速度隨時間起伏較小的條件下,提高了網(wǎng)絡模型的預測精度。數(shù)據(jù)驅動法主要包括深度學習和神經(jīng)網(wǎng)絡。Huang等將深度學習應用于短時交通流預測中,其運用無監(jiān)督學習法獲取相關交通流數(shù)據(jù)特征,提高了預測的準確率。Ma等將LSTM網(wǎng)絡引入交通速度預測,LSTM模型可提高交通流數(shù)據(jù)的長時間依賴。
綜上所述,交通數(shù)據(jù)采集手段的發(fā)展和深度學習的應用為解決交通相關問題提供了新的思路,本文分析深度學習的神經(jīng)網(wǎng)絡結構,利用門控循環(huán)單元神經(jīng)網(wǎng)絡算法對城市短時交通流預測進行探索。
2短時交通流預測模型
2.1 LSTM神經(jīng)網(wǎng)模型
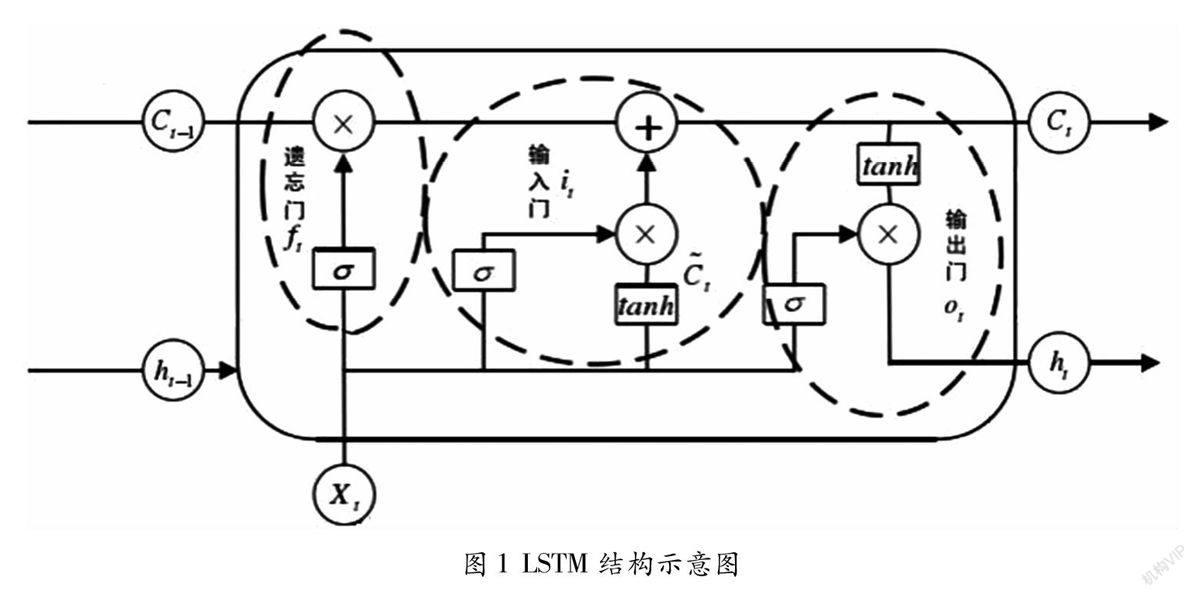
LSTM由循環(huán)神經(jīng)網(wǎng)絡優(yōu)化演變來的,LSTM神經(jīng)加入了門控機制來保存輸入系列相關信息,期中引入了輸入門、遺忘門、輸出門,從而解決了長序列訓練中梯度消失及梯度爆炸問等,使其擁有學習交通流長序列信息的功能,LSTM模型內部結構如圖1所示。
圖1中,箭頭是參數(shù)傳遞方向,x1表示模型的輸入?yún)?shù),ht為單元當前的輸出,ct是當前單元結構的狀態(tài)信息,ft、it、ot分別表示遺忘門、輸入門和輸出門的輸出信息。如下是該模型的傳遞公式。
2.2門控循環(huán)單元神經(jīng)網(wǎng)絡
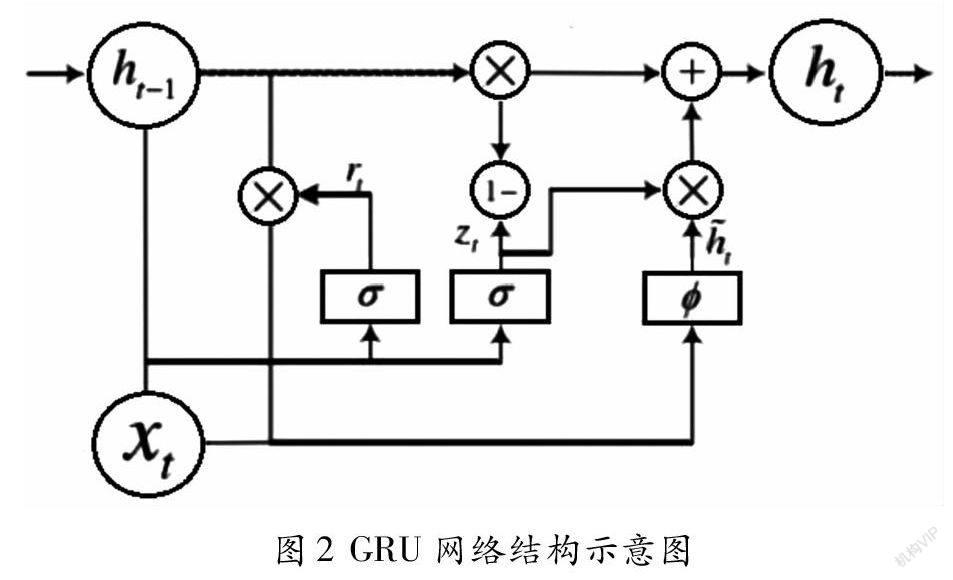
門控循環(huán)單元神經(jīng)網(wǎng)絡GRU可看做LSTM的一個重要變體網(wǎng)絡,它的特點是將循環(huán)體的輸入門和遺忘門合并
3實驗與結果分析
3.1數(shù)據(jù)及預處理
本文采用PeMS收集的交通流數(shù)據(jù)進行分析,選取2016年3月1日至2016年4月20日期間對某路段的交通流量數(shù)據(jù),時間間隔為5min。其中80%的數(shù)據(jù)用于GRU神經(jīng)網(wǎng)絡預測模型的訓練,20%的數(shù)據(jù)用于測試。受外界干擾,常出現(xiàn)數(shù)據(jù)異常或缺失等現(xiàn)象,通常需要進行實驗數(shù)據(jù)的預處理。本文運用Min-Max函數(shù)對數(shù)據(jù)做歸一化操作,提高模型的收斂速度和預測能力。
3.2預測模型評價指標
為了對預測的結果進行分析,本文將模型預測的結果誤差作為評價指標,期中,選擇了常用的均方誤差、平均絕對誤差和平均絕對百分比誤差來描述和評價各模型的預測精度,相關誤差公式如下:為更新門,GRU只有重置門和更新門兩個門控機制,其工作原理與LSTM模型相似,都是用門控機制來選擇保留和遺忘一些信息,在這樣的工作方式下,有選擇的存儲來自交通流序列的時間關聯(lián)信息,保留了長期時間序列信息減少梯度消失問題,同時,GRU結構相對簡單,模型收斂速度較快,GRU的計算效率比LSTM有所提高。GRU結構示意圖如圖2所示。
3.3實驗內容及結果
本文對構建的短時交通流量預測模型運用Python語言開發(fā)環(huán)境,在Keras中進行訓練測試。
為了對比分析,本文建立SVR模型、ARIMA模型、LSTM模型,以及GRU模型4種模型進行訓練和測試。其中,統(tǒng)計模型ARIMA的建立基于Statsmodels庫,模型的參數(shù)為默認值,模型SVR的建立基于Sklearn庫,模型的參數(shù)為默認值。將LSTM預測模型層數(shù)設為4層,包括輸入層、輸出層和2個LSTM層。期中,隱層神經(jīng)元為64,訓練迭代次數(shù)(epoch)為100,采用Adam算法作為模型訓練的優(yōu)化器。
將預測位置的歷史交通數(shù)據(jù)輸入預測網(wǎng)絡模型中,下一時刻交通流量作為輸出,基于GRU的短時交通流預測結果分別如圖3所示,可見交通流的預測值與實際交通量吻合度較高,表明本文所用的GRU預測模型能有效預測出道路下一時刻的交通流量,GRU網(wǎng)絡可較好地擬合交通流變化的非線性特性,并能自適應獲取序列數(shù)據(jù)問的關聯(lián)性,選取歷史數(shù)據(jù)進行預測,模型展現(xiàn)了很好的預測性能。
不同模型的各類誤差指標進行對比的結果如表1。從中可見,GUR模型的預測誤差及精度與LSTM預測網(wǎng)絡接近,都明顯優(yōu)于SVR模型和ARIMA模型,神經(jīng)網(wǎng)絡具有多隱含層的結構有助于獲取交通流數(shù)據(jù)的特征,使得GRU模型各類指標均較小,表現(xiàn)出了良好的預測指標,實驗結果證明,GRU模型可較準確地模擬城市交通流量的實時變化情況,可用于城市交通流量的預測。
4結論
本文建立了GRU的神經(jīng)網(wǎng)絡預測模型,利用深度學習對交通流預測作了相關探索。將歷史交通流數(shù)據(jù)輸入GRU神經(jīng)網(wǎng)絡中,挖掘短時交通流數(shù)據(jù)的時間特征,對城市短時交通流進行預測。實驗結果表明該網(wǎng)絡模型預測性能優(yōu)于SVR模型和ARIMA網(wǎng)絡模型,具有較高的準確率,可為智能交通管理與控制提供有效依據(jù)。
作者簡介:黃政(1981— ),男,漢族,貴州貴陽人,博士,教授,研究方向:智能交通系統(tǒng)、交通數(shù)據(jù)分析與應用。
猜你喜歡
中國教育技術裝備(2016年19期)2016-12-27 19:23:52
中國遠程教育(2016年11期)2016-12-27 18:07:31
現(xiàn)代商貿(mào)工業(yè)(2016年25期)2016-12-26 09:58:02
江蘇教育·中學教學版(2016年11期)2016-12-21 11:45:08
江蘇教育·中學教學版(2016年11期)2016-12-21 11:36:29
現(xiàn)代情報(2016年10期)2016-12-15 11:50:53
考試周刊(2016年94期)2016-12-12 12:15:04
新教育時代·教師版(2016年23期)2016-12-06 06:02:38
法制與社會(2016年32期)2016-12-01 15:25:53
軟件導刊(2016年9期)2016-11-07 22:20:49