基于細胞型膜計算的煤礦巡檢無人直升機姿態(tài)控制
2021-11-30 03:22:06許家昌黃友銳李虹金劉瑜韓濤
工礦自動化 2021年11期
關(guān)鍵詞:實驗
許家昌, 黃友銳, 李虹金, 劉瑜, 韓濤
(1.安徽理工大學(xué) 計算機科學(xué)與工程學(xué)院,安徽 淮南 232001;2.安徽理工大學(xué) 電氣與信息工程學(xué)院,安徽 淮南 232001;3.大連理工大學(xué) 生物醫(yī)學(xué)工程學(xué)院,遼寧 大連 116000;4.安徽理工大學(xué) 深部煤礦采動響應(yīng)與災(zāi)害防控國家重點實驗室,安徽 淮南 232001)
0 引言
煤礦智能開采過程中[1],智能巡檢(瓦斯?jié)舛取⒐芫€及災(zāi)后搜救等)在煤礦災(zāi)害防控體系中占據(jù)重要地位,機器人在井下巡檢具備一定的優(yōu)勢,面臨大的障礙物時,在可通過性方面,無人直升機更具優(yōu)勢,如何讓無人直升機快速高效完成巡檢任務(wù),姿態(tài)控制是關(guān)鍵。
近年來,關(guān)于無人直升機姿態(tài)控制[2-3]的研究取得了許多成果。文獻[4]建立了無人直升機線性模型,設(shè)計實現(xiàn)了姿態(tài)跟蹤控制器,通過仿真及實驗證明了控制器設(shè)計的有效性。文獻[5]采用反步法設(shè)計了無人直升機飛行控制律,利用自適應(yīng)方法實現(xiàn)了系統(tǒng)參數(shù)在線估計,達到了對直升機姿態(tài)控制的目的。文獻[6]利用反步法與神經(jīng)網(wǎng)絡(luò)相結(jié)合,實現(xiàn)了無人直升機的定位,一定程度上提高了無人直升機的飛行性能。文獻[7]通過設(shè)計無人直升機非線性控制器,實現(xiàn)了無人直升機的姿態(tài)控制及位置跟蹤。文獻[8]利用非線性控制算法實現(xiàn)了無人直升機的自適應(yīng)控制性能。文獻[9]利用模糊控制理論,實現(xiàn)了無人直升機的控制器設(shè)計,提高了無人直升機的姿態(tài)控制性能。文獻[10]利用神經(jīng)網(wǎng)絡(luò)和強化學(xué)習(xí)設(shè)計無人直升機的姿態(tài)控制器,通過實驗驗證了算法的有效性。文獻[11]實現(xiàn)了復(fù)雜環(huán)境下的多機姿態(tài)控制。現(xiàn)有無人直升機姿態(tài)控制大多以線性和非線性算法為主,在控制效果上均表現(xiàn)出了較好的性能,但是伴隨應(yīng)用場景的變化,擾動也隨之變化,導(dǎo)致無人直升機姿態(tài)波動幅度和誤差變大。膜計算[12]作為受細胞組織機理啟發(fā)而產(chǎn)生的計算模型,具有分布式、并行計算的優(yōu)勢,正朝著優(yōu)化控制領(lǐng)域進行突破性延伸,成為當前的研究熱點。因此,本文引入細胞型膜計算實現(xiàn)對煤礦巡檢無人直升機姿態(tài)的優(yōu)化控制。通過建立無人直升機動力學(xué)模型,推導(dǎo)出無人直升機姿態(tài)動力學(xué)模型,構(gòu)建了無人直升機細胞型膜系統(tǒng),以此作為無人直升機運動姿態(tài)控制的依據(jù),通過構(gòu)建無人直升機姿態(tài)膜控制器(Membrane Controller,MC)完成對無人直升機姿態(tài)的控制。
1 無人直升機姿態(tài)動力學(xué)模型
建立正確的機體坐標系與地面坐標系之間的換算關(guān)系是表征無人直升機運動狀態(tài)的前提。為實現(xiàn)無人直升機姿態(tài)控制,需要控制姿態(tài)角(偏航角Φ、俯仰角θ、滾轉(zhuǎn)角ψ)。
由于井下環(huán)境復(fù)雜,本文只考慮無人直升機在主旋翼和尾旋翼作用下的運動和動力學(xué)特性。無人直升機動力學(xué)模型由無人直升機本體動力學(xué)方程、旋翼動力學(xué)方程和角速度控制器3個部分構(gòu)成,如圖1所示,其中uped,ucol,ulat,ulon分別為方向舵機、主旋翼舵機、副翼舵機和俯仰舵機的輸入,F(xiàn)B為外作用力,τB為扭矩向量。
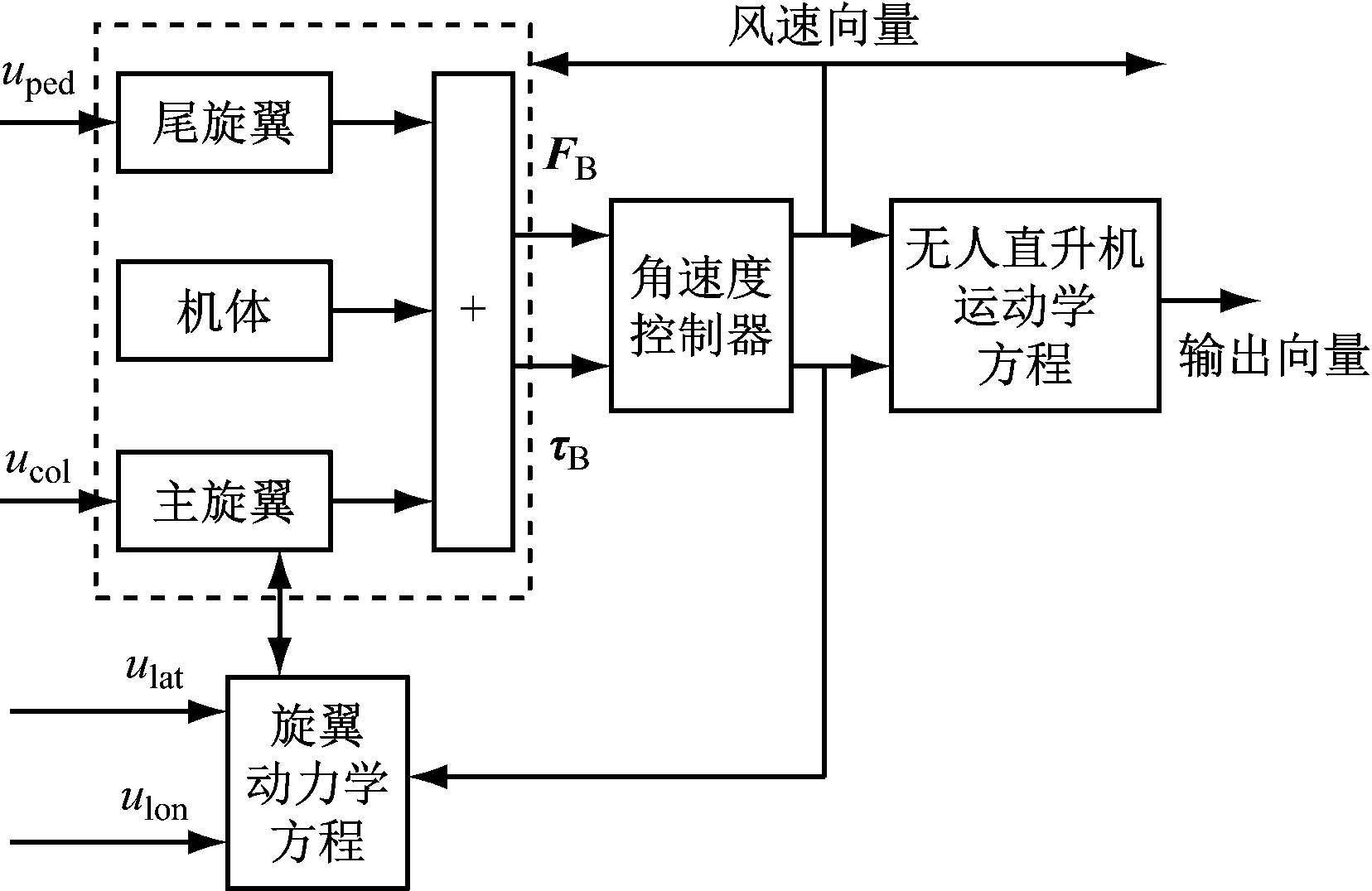
圖1 無人直升機動力學(xué)模型
作用于無人直升機上的力和力矩決定著無人直升機飛行性能的優(yōu)劣,通過坐標系的變換確定無人直升機的位置和方向,從而提供準確的姿態(tài)和平移運動信息。假設(shè)地面坐標系下的線速度和角速度坐標向量分別為υ和ω, 則υ和ω在機體坐標系中表示為[13]
υ=oBvX+jBvY+lBvZ
(1)
ω=oBwX+jBwY+lBwZ
(2)
式中:oB,jB,lB分別為X,Y,Z軸的單位向量;vX,vY,vZ分別為X,Y,Z軸線速度;wX,wY,wZ分別為X,Y,Z軸角速度。
利用旋轉(zhuǎn)矩陣R對地面坐標系下無人直升機位姿和平移運動推理,結(jié)合R的導(dǎo)數(shù),可得無人直升機動力學(xué)方程:
(3)
式中I為單位矩陣。
考慮無人直升機負載,本文忽略尾翼推力對無人直升機的影響,即無人直升機僅受主旋翼和重力作用。
(4)
式中:G為無人直升機所受重力;TM為主旋翼作用力。
無人直升機姿態(tài)動力學(xué)模型為
(5)
式中:ωB為機體角速度向量;QM為反作用扭矩向量;(xc,yc,zc)為主旋翼位置向量;D為旋翼彀的剛度;a為正增益;(xh,0,zh)為尾旋翼位置向量;σ為控制姿態(tài)穩(wěn)定性的輸入向量。
2 細胞型膜系統(tǒng)
細胞型膜系統(tǒng)是一種具有分層膜結(jié)構(gòu)分布式并行計算模型,考慮無人直升機參數(shù)的特性,定義度為s(s≥1)的數(shù)值膜系統(tǒng)[14]。
Π={s,H,μ,(V1,P1,V1(0)),…,(Vs,Ps,Vs(0))}
(6)
式中:H為膜標記集合;μ為包含度為s的膜結(jié)構(gòu);Vi為膜結(jié)構(gòu)區(qū)域i內(nèi)的1組變量,1≤i≤s;Vi(0)為Vi的初始值;Pi為膜結(jié)構(gòu)區(qū)域i內(nèi)的1組規(guī)則,包括值的產(chǎn)生規(guī)則和分配規(guī)則。
系統(tǒng)中第t條規(guī)則可定義為
Pt,i={ft,i(d1,i,d2,i,…,dk,i),
λt,1|g1+λt,2|g2+…+λt,n|gn}
(7)
式中:ft,i(d1,i,d2,i,…,dk,i)為膜結(jié)構(gòu)區(qū)域i內(nèi)值的產(chǎn)生規(guī)則,dk,i為膜結(jié)構(gòu)區(qū)域i內(nèi)第k個隨機變量;λt,1|g1+λt,2|g2+…+λt,n|gn為第n個值的第t條分配規(guī)則,λt,1—λt,n為膜結(jié)構(gòu)區(qū)域i內(nèi)第n個值的分配比例系數(shù),g1—gn為膜結(jié)構(gòu)區(qū)域i內(nèi)第n個值的分配對象。
當值的產(chǎn)生規(guī)則計算出值f時,該值除以分配比例系數(shù)λt,1—λt,n之和,得到膜的值。如果在膜的值分配過程中存在相同變量,把計算得到膜的值分配給每個變量,且把計算累加值作為變量的最終值。
3 無人直升機姿態(tài)MC
以姿態(tài)角振幅的大小和姿態(tài)控制誤差表征無人直升機姿態(tài)MC穩(wěn)定性和有效性。
設(shè)定控制率規(guī)則按照順序執(zhí)行,設(shè)定完整的無人直升機姿態(tài)MC計算周期需循環(huán)3次完成。假設(shè)eΦ為偏航角誤差,則偏航角誤差動力學(xué)方程為
(8)
式中b為偏航角速度偽控制矩陣。
(9)
式中:r為偽控制調(diào)節(jié)系數(shù);αr為基于r的調(diào)節(jié)矩陣;ew為角速度誤差。
式(9)去除非線性項后,可得
(10)
結(jié)合式(5),推導(dǎo)出角速度誤差。
(11)
式中A為正增益對角矩陣。
同理,考慮正交向量約束的局限性,角速度偽控制下的方向誤差動力學(xué)方程為
(12)
式中:[β1β2]為正交調(diào)節(jié)矩陣;ep為p的誤差;Z0(θ)為正交向量。
式(9)、式(11)和式(12)構(gòu)成無人直升機姿態(tài)誤差方程。
4 實驗驗證
利用設(shè)計的細胞型膜系統(tǒng)及機載計算機與激光雷達、深度相機等傳感器搭建實驗平臺,實驗平臺軟硬件參數(shù)見文獻[15]。為驗證無人直升機姿態(tài)MC的性能,將MC分別與線性反饋控制器(Linear Feedback Controller,LFC)、傳統(tǒng)滑膜控制器(Traditional Synovial Controller,TSC)進行比較。
4.1 地面上空飛行實驗
實驗所需的各種傳感器均采用雙面輕泡沫粘膠固定,以減小無人直升機飛行過程中因本體振動而出現(xiàn)過大的數(shù)據(jù)誤差,起飛前調(diào)試并確保各姿態(tài)角與控制量之間呈同向關(guān)系。為保證實驗結(jié)果更加合理可靠,地面上空飛行路線距離墻體1.5 m,距離地面高度為3.5 m。
實驗開始時控制無人直升機達到平穩(wěn)狀態(tài),之后將飛行狀態(tài)轉(zhuǎn)換到自動飛行狀態(tài),得到地面上空無人直升機姿態(tài)角隨時間t變化曲線,如圖2和圖3所示。
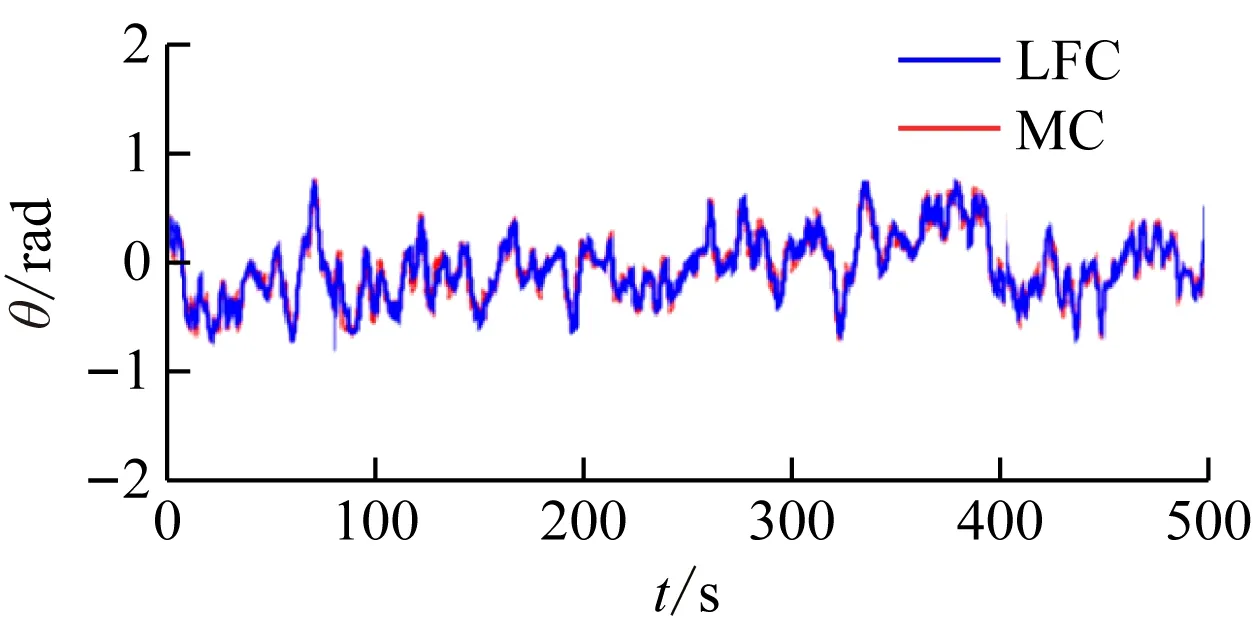
(a)俯仰角隨時間變化
從圖2和圖3可看出,無人直升機在地面上空飛行過程中,在MC、LFC和TSC下均完成了對無人直升機姿態(tài)的控制,即姿態(tài)角幅度均得到了有效控制,達到了相對穩(wěn)定狀態(tài);MC姿態(tài)角控制在-0.8~0.8 rad范圍內(nèi),姿態(tài)角振蕩幅度小于TSC和LFC下姿態(tài)角振蕩幅度。
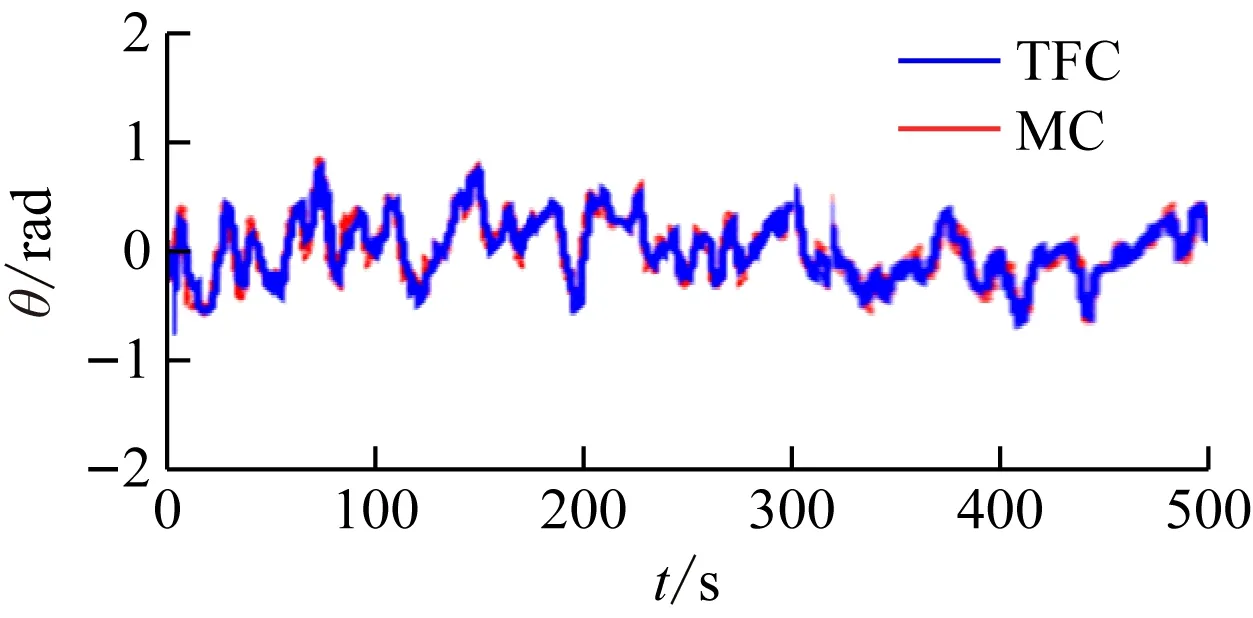
(a)俯仰角隨時間變化
4.2 煤礦巷道飛行實驗
受無人直升機電源防爆等限制,在模擬巷道(風(fēng)速控制在4 m/s)進行實驗。模擬巷道無人直升機姿態(tài)角隨時間變化曲線如圖4和圖5所示。
從圖4和圖5可看出,無人直升機在模擬巷道飛行過程中,MC、LFC和TSC下無人直升機姿態(tài)角均沒有出現(xiàn)大幅波動,姿態(tài)角振蕩幅度為-2~2 rad;MC下姿態(tài)角振蕩幅度最小,為-1.8~2.0 rad范圍之內(nèi),且波動頻率變小。
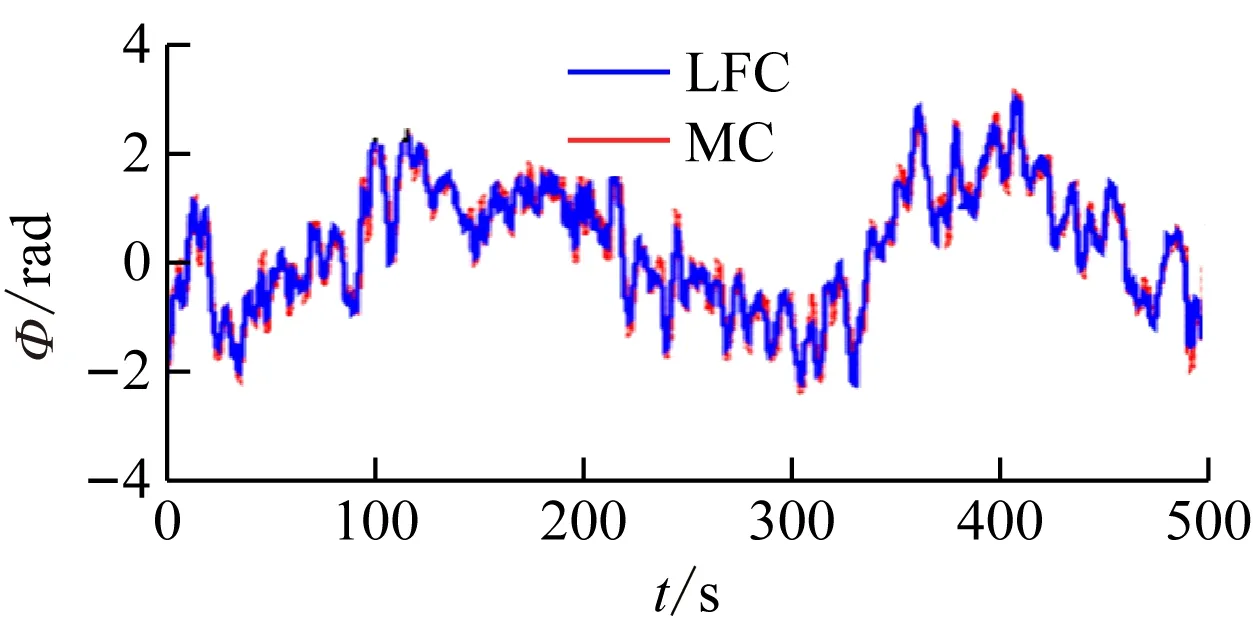
(a)偏航角隨時間變化
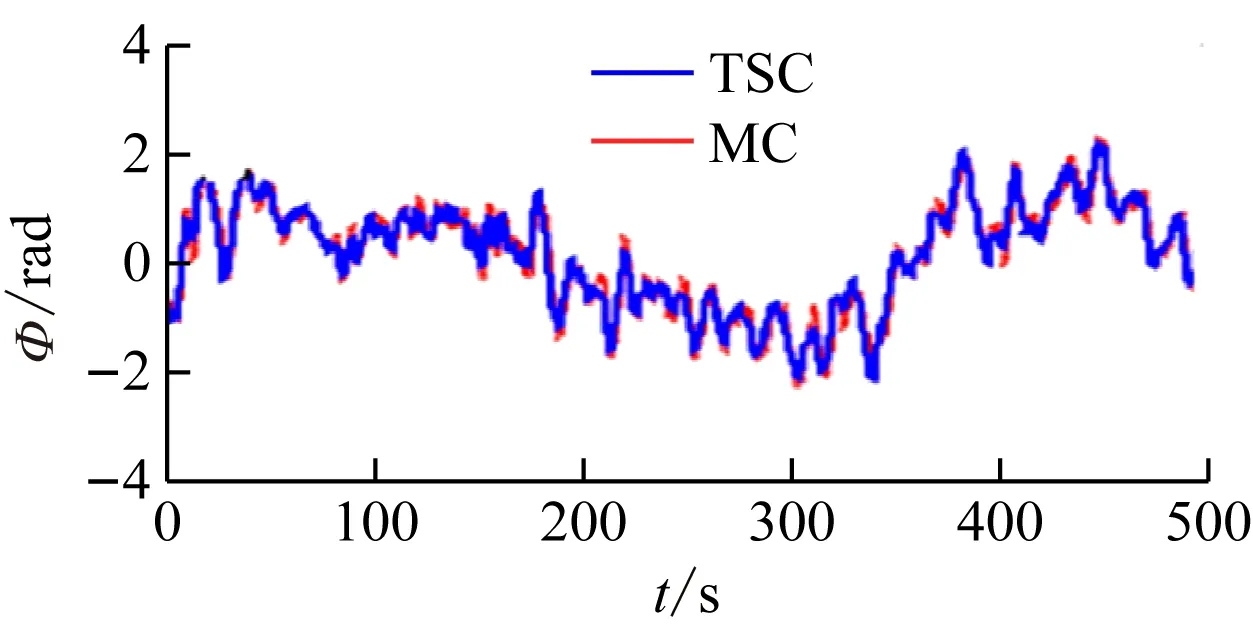
(a)偏航角隨時間變化
4.3 姿態(tài)角誤差
根據(jù)實驗過程中得到的數(shù)據(jù),TSC、LFC和MC下姿態(tài)角誤差見表1,可看出MC下姿態(tài)角誤差小于TSC和LFC下姿態(tài)角誤差。
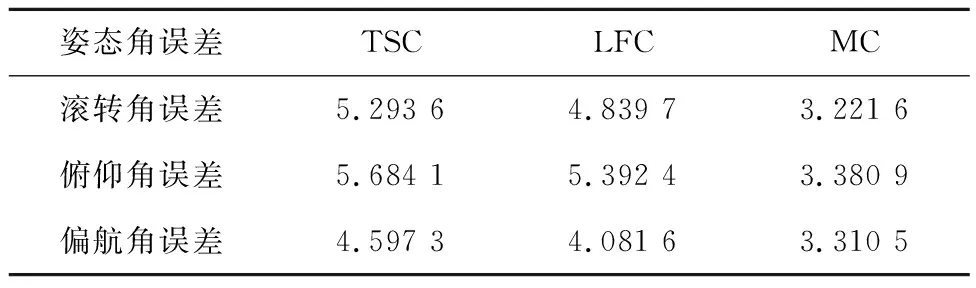
表1 姿態(tài)角誤差
5 結(jié)論
(1)根據(jù)無人直升機動力學(xué)模型構(gòu)建了無人直升機姿態(tài)動力學(xué)模型,設(shè)計了細胞型膜系統(tǒng)和無人直升機MC。
(2)在地面上空環(huán)境,MC下的姿態(tài)角控制在-0.8~0.8 rad,姿態(tài)角振蕩幅度小于TSC和LFC下的姿態(tài)角振蕩幅度;在模擬巷道環(huán)境,MC下的姿態(tài)角控制在-1.8~2.0 rad,波動頻率小;MC下的姿態(tài)角誤差小于TSC和LFC下的姿態(tài)角誤差。
(3)由于實際工礦巷道下灰塵、溫度、濕度與模擬巷道存在一定的差異性,可能導(dǎo)致實驗結(jié)果與實際工礦巷道下的實驗結(jié)果存在一定差異,通過地面上空和模擬巷道實驗證明了MC的優(yōu)越性能,后續(xù)在符合煤礦安全規(guī)程的前提下,繼續(xù)進行實際工礦下的現(xiàn)場實驗。
猜你喜歡
作文·小學(xué)低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學(xué)生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學(xué)低年級(2024年2期)2024-04-29 00:00:00
作文·小學(xué)低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55