基于數字煤層的綜采工作面精準開采系統
2021-11-30 03:22:02李旭吳雪菲田野董博黨恩輝
工礦自動化 2021年11期
李旭, 吳雪菲, 田野, 董博, 黨恩輝
(1.西安理工大學 水利水電學院,陜西 西安 710048;2.西安科技大學 能源學院,陜西 西安 710054;3.西安重工裝備制造集團有限公司,陜西 西安 710054;4.西安合智宇信息科技有限公司,陜西 西安 710016)
0 引言
我國智能化開采尚處于初級階段[1]。目前,煤巖識別難題仍未突破,將現階段“記憶截割+人工遠程干預”的自動化開采技術應用于煤層起伏變化較大的復雜地質條件中,難以實現采煤機自動調高控制[2-3]。基于透明地質建立綜采工作面三維數字煤層模型,并結合三維數字煤層模型動態規劃采煤機截割路徑,是實現采煤機自動調高控制的有效途徑[4]。因此,亟需研發基于數字煤層的綜采工作面精準開采系統,為綜采工作面智能開采奠定基礎。
數字煤層是指通過煤礦地質數據和測量手段構建的綜采工作面三維煤層模型,是間接解決煤巖識別難題的有效途徑。綜采工作面精準開采系統是一個復雜系統,需要三維數字煤層模型、綜采設備動態感知、綜采設備自動控制等技術的支持,是實現智能開采的關鍵。目前,一些學者對綜采工作面精準開采做了初步研究。董書寧等[5]論述了面向煤炭智能開采的地質保障技術體系,指出了三維數字煤層建模對智能開采的重要意義。王國法等[6]指出工作面智能開采必須建立在煤層地質情況全面詳細了解的基礎之上,需要在多源異構數據的統一表達及信息動態關聯上進一步攻關。Fan Qigao等[7]提出了利用組合慣導技術檢測采煤機精確位姿的方法,可控制液壓支架調直,綜采工作面直線度精度可以達到50 cm,為精準開采中液壓支架自動調直提供了良好的參考,但該方法無法精確檢測工作面頂板的起伏變化,采煤機無法根據煤層厚度變化進行自動調高控制。鄧濤等[8]以山東棗莊礦業集團濱湖煤礦12210工作面為研究背景,提出了薄煤層綜采遠程可視化無人工作面開采技術。王志剛[9]通過地質測量獲得的煤層數據建立了煤層三維模型,通過采煤機模型在煤層模型中的運動、界面碰撞檢查實時調整采煤機搖臂高度,進而實現自動化無人開采。馬宏偉等[10]提出了一種基于地質數據的智能化工作面煤巖界面識別方法,根據實測地質數據建立三維煤層模型間接對煤巖界面進行識別,從而指導采煤機自動調高控制。
綜上可知,目前以記憶截割為核心技術的自動化采煤技術存在無法自主感知工作面地質條件變化,采煤機難以實現根據煤層厚度變化自動進行調高控制的問題。而對于精準開采方面也只是進行了初步探索,僅提出了研究思路。在目前綜采自動化系統基礎上構建三維數字煤層模型是實現綜采工作面精準開采的有效途徑。鑒此,本文研發了一種基于數字煤層的綜采工作面精準開采系統。該系統構建了三維數字煤層模型,通過綜采設備動態感知數據對三維數字煤層模型進行動態修正來提高模型的建模精度,從而間接解決綜采工作面煤巖識別難題,實現采煤機截割軌跡動態規劃。通過將規劃的采煤機截割軌跡曲線下發給采煤機,實現采煤機自動調高控制。根據組合慣導檢測刮板輸送機的直線度,并通過綜采工作面直線度檢測曲線和液壓支架行程信息綜合分析計算下一刀每臺液壓支架推移的偏差量,從而實現液壓支架自動調直。通過綜采設備遠程監測監控技術實現綜采設備遠程監測監控。該精準開采系統的研發對煤礦安全、高效、智能開采具有一定的參考意義。
1 系統結構
基于數字煤層的綜采工作面精準開采系統結構如圖1所示,主要包括三維數字煤層建模、綜采設備動態感知、遠程監測監控和綜采設備控制4個部分。
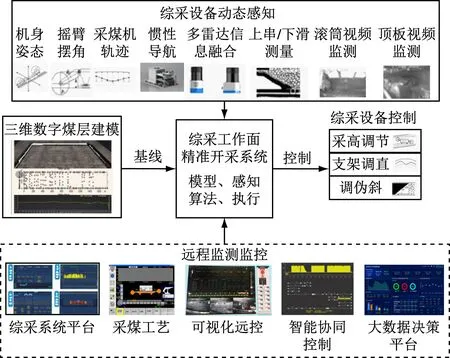
圖1 基于數字煤層的綜采工作面精準開采系統結構
基于數字煤層的綜采工作面精準開采系統工作原理:首先利用煤礦地質數據、工作面切眼數據和工作面運輸巷與回風巷地質寫實數據及三次樣條插值方法建立初始三維數字煤層模型。然后通過綜采設備慣性導航系統、里程計、雷達、角度傳感器等動態感知采煤機實際行走軌跡和截割軌跡,對建立的三維數字煤層模型進行動態修正,生成刮板輸送機直線度檢測曲線。最后綜采工作面遠程監測監控平臺根據修正后的三維數字煤層模型動態規劃采煤機截割軌跡曲線,并下發給采煤機控制系統,指導采煤機根據煤層厚度變化自動進行調高控制;將檢測到的刮板輸送機直線度曲線下發給綜采工作面液壓支架控制系統,實現液壓支架自動調直。
2 系統關鍵技術
2.1 基于三維數字煤層模型的截割軌跡規劃技術
綜采工作面三維數字煤層模型是間接解決煤巖識別難題的有效途徑。通過三維數字煤層模型規劃采煤機截割軌跡是實現采煤機根據煤層厚度變化自動進行調高控制的關鍵。綜采工作面三維數字煤層模型建立及采煤機截割軌跡規劃如圖2所示。利用鉆探或三維地震法等獲得的煤礦地質數據和通過三維激光雷達掃描等獲得的工作面切眼數據、工作面運輸巷與回風巷地質寫實數據和模型邊界等信息,在統一零點與坐標系的條件下利用三次樣條插值方法建立綜采工作面初始三維數字煤層模型。隨著工作面開采的進行,通過綜采設備感知或三維激光雷達掃描等采集采煤機實際截割軌跡,并將采煤機實際截割軌跡數據融入初始三維數字煤層模型中進行更新,從而獲得動態三維數字煤層模型,并對三維數字煤層模型進行網格化。對動態更新的網格化三維數字煤層模型按照采煤機截深進行CT切片,可以獲取采煤機規劃刀的截割軌跡,通過三維建模軟件對網格化三維數字煤層模型進行三維可視化顯示。

圖2 綜采工作面三維數字煤層建模及截割軌跡規劃
2.2 采煤機調高軌跡自動跟蹤控制技術
采煤機調高軌跡自動跟蹤控制技術是采煤機根據煤層厚度變化自適應調高的關鍵技術。基于三維數字煤層模型的采煤機調高軌跡跟蹤控制原理如圖3所示。
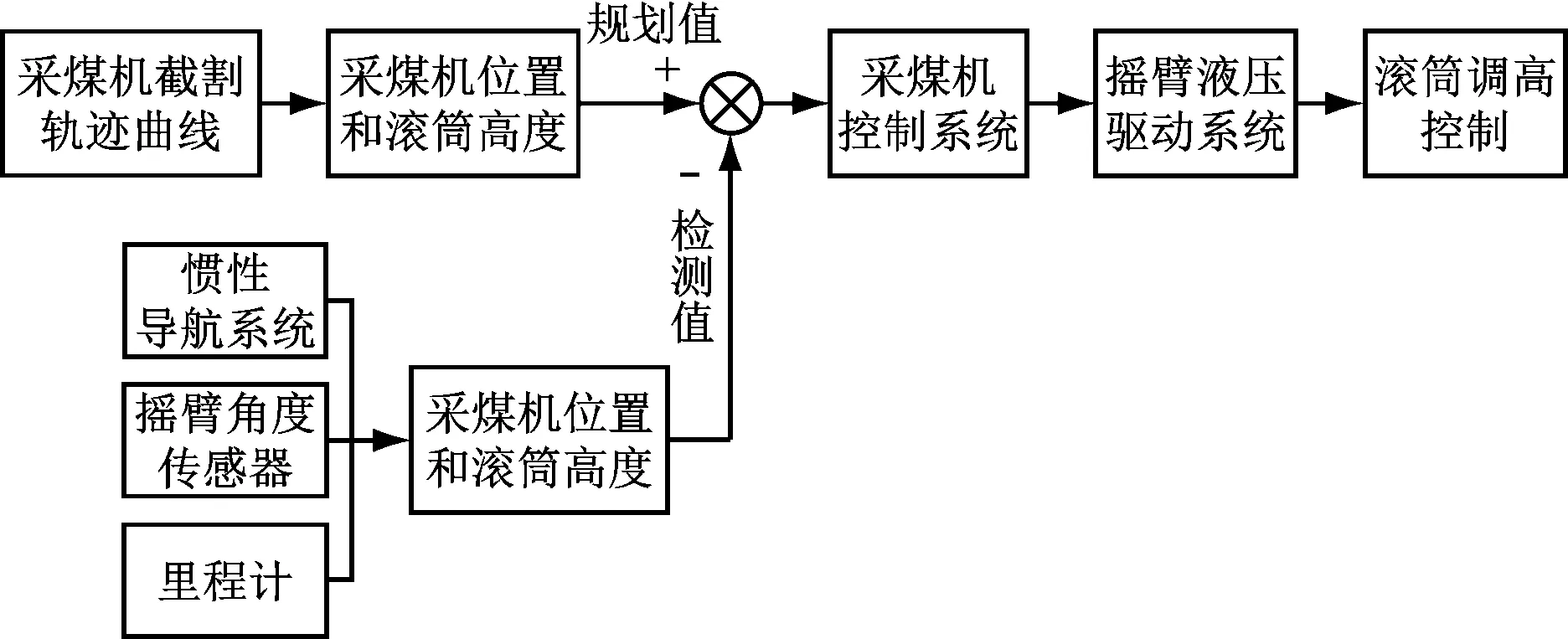
圖3 采煤機調高軌跡自動跟蹤控制原理
通過構建的動態三維數字煤層模型規劃采煤機截割軌跡曲線,并通過離散化獲得每個點的采煤機位置與滾筒高度信息,這些信息作為采煤機調高控制的規劃值。通過慣性導航系統、里程計和搖臂角度傳感器實時檢測采煤機位置和滾筒高度信息,這些信息作為滾筒調高控制的檢測值。通過比較同一位置規劃的采煤機滾筒高度信息與實際檢測到的滾筒高度信息獲得采煤機調高補償量,并通過采煤機調高控制系統按照調高補償量控制采煤機搖臂液壓驅動系統進行滾筒調高控制,從而實現采煤機滾筒調高自動跟蹤采煤機規劃的截割軌跡。
2.3 綜采工作面液壓支架自動調直技術
綜采工作面液壓支架自動調直技術是保證綜采工作面三平一直的關鍵,液壓支架自動調直控制原理如圖4所示。
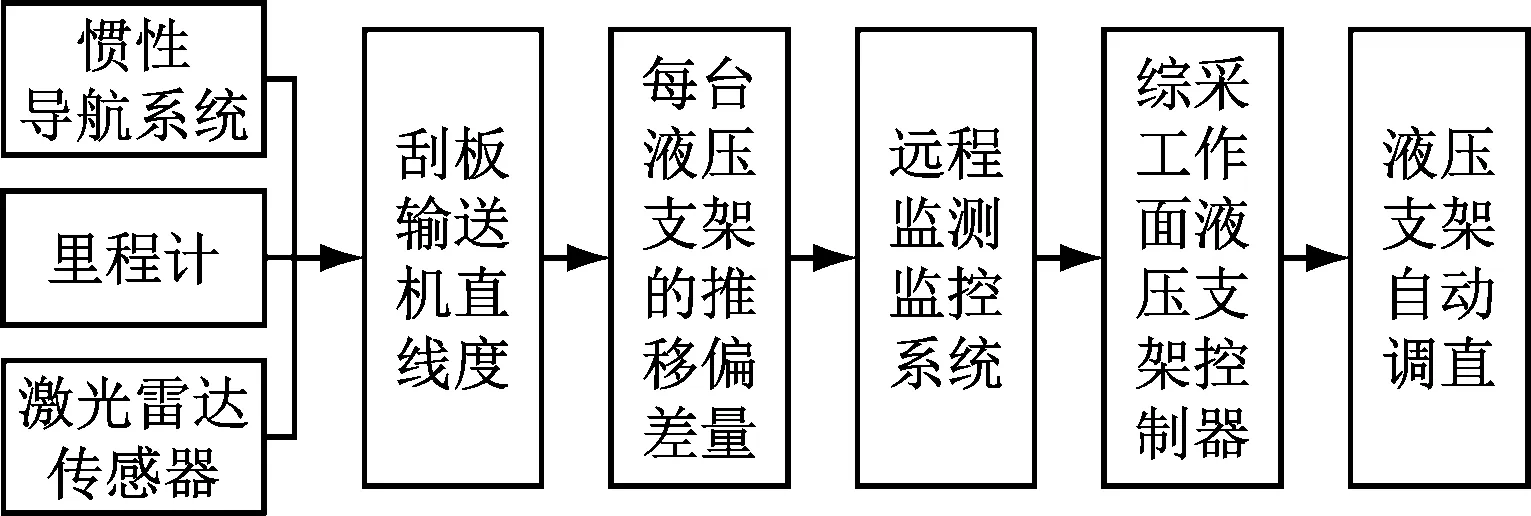
圖4 液壓支架自動調直控制原理
采用慣性導航系統、里程計和激光雷達傳感器對綜采工作面直線度進行檢測,通過激光雷達探測運輸巷與回風巷幫部定點布置的標志物來修正慣性導航系統與里程計融合定位累積誤差,并給慣性導航系統提供初始絕對坐標,從而實現綜采工作面刮板輸送機直線度的精確檢測。根據刮板輸送機直線度檢測結果和液壓支架行程信息計算出下一刀每臺液壓支架推移的偏差量,計算原理如圖5所示。圖中只畫出了20架支架,y為支架的推移距離,Δy為推移距離修正值。綜采工作面遠程監測監控系統根據采煤機截深和下一刀每臺液壓支架的推移偏差量,下發規劃的下一刀每臺液壓支架推移行程信息給液壓支架控制器,從而實現液壓支架自動調直。
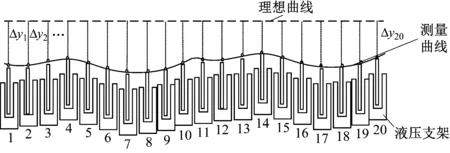
圖5 液壓支架推移偏差計算原理
3 系統應用效果分析
為了驗證基于數字煤層的綜采工作面精準開采系統的應用效果,在陜煤集團黃陵煤礦綜采工作面開展了基于三維數字煤層模型的截割軌跡規劃試驗、采煤機調高軌跡自動跟蹤試驗和液壓支架自動調直試驗,井下現場應用如圖6所示。

圖6 系統在煤礦井下的應用
3.1 截割軌跡規劃試驗
基于三維數字煤層模型的截割軌跡規劃如圖7所示,顯示了三維數字煤層模型以采煤機截深為步距的CT切片信息、采煤機在三維數字煤層模型CT切片中的導航信息、切片動態更新信息、截割規劃信息、當前規劃的截割軌跡曲線和采煤機位姿信息等。通過三維數字煤層模型的CT切片可以獲取采煤機規劃刀的截割軌跡,并且可以將規劃刀的截割軌跡下發給采煤機控制器。
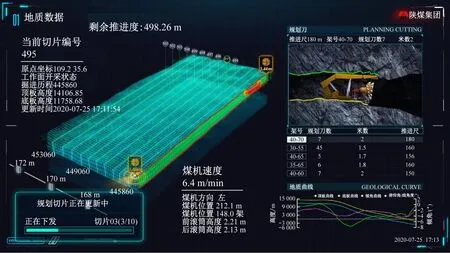
圖7 基于三維數字煤層模型的截割軌跡規劃
基于三維數字煤層模型規劃的采煤機截割曲線與通過全站儀測量獲得的實測煤巖分界曲線結果對比如圖8所示。從圖8可看出,規劃的采煤機截割曲線與通過全站儀測量獲得的實測煤巖分界曲線基本一致,最大誤差小于0.2 m,通過三維數字煤層模型規劃的截割軌跡具有較高的精度,為采煤機自適應調高控制奠定了良好基礎。
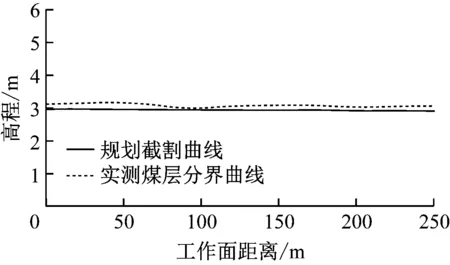
圖8 實測煤巖分界曲線與規劃截割曲線對比
3.2 采煤機調高軌跡自動跟蹤試驗
采煤機每一刀的規劃信息和實時截割軌跡的信息可以通過采煤機規劃軟件界面進行詳細顯示,圖9顯示了采煤機規劃的截割軌跡曲線、采煤機實際截割軌跡測量曲線、采煤機位姿檢測曲線、截割過程中是否進行了人工干預等信息。采煤機實際截割曲線與基于三維數字煤層模型規劃的截割軌跡曲線對比如圖10所示。從圖10可看出:該精準開采系統實現了采煤機截割軌跡的實時檢測,采煤機規劃的截割軌跡曲線與采煤機實際截割曲線基本一致,具有良好的自動跟蹤效果。
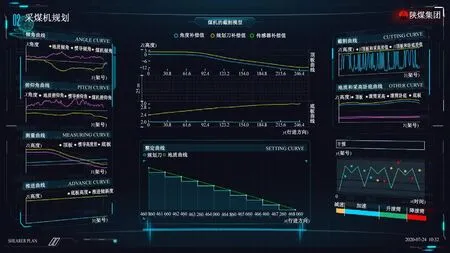
圖9 采煤機規劃軟件界面
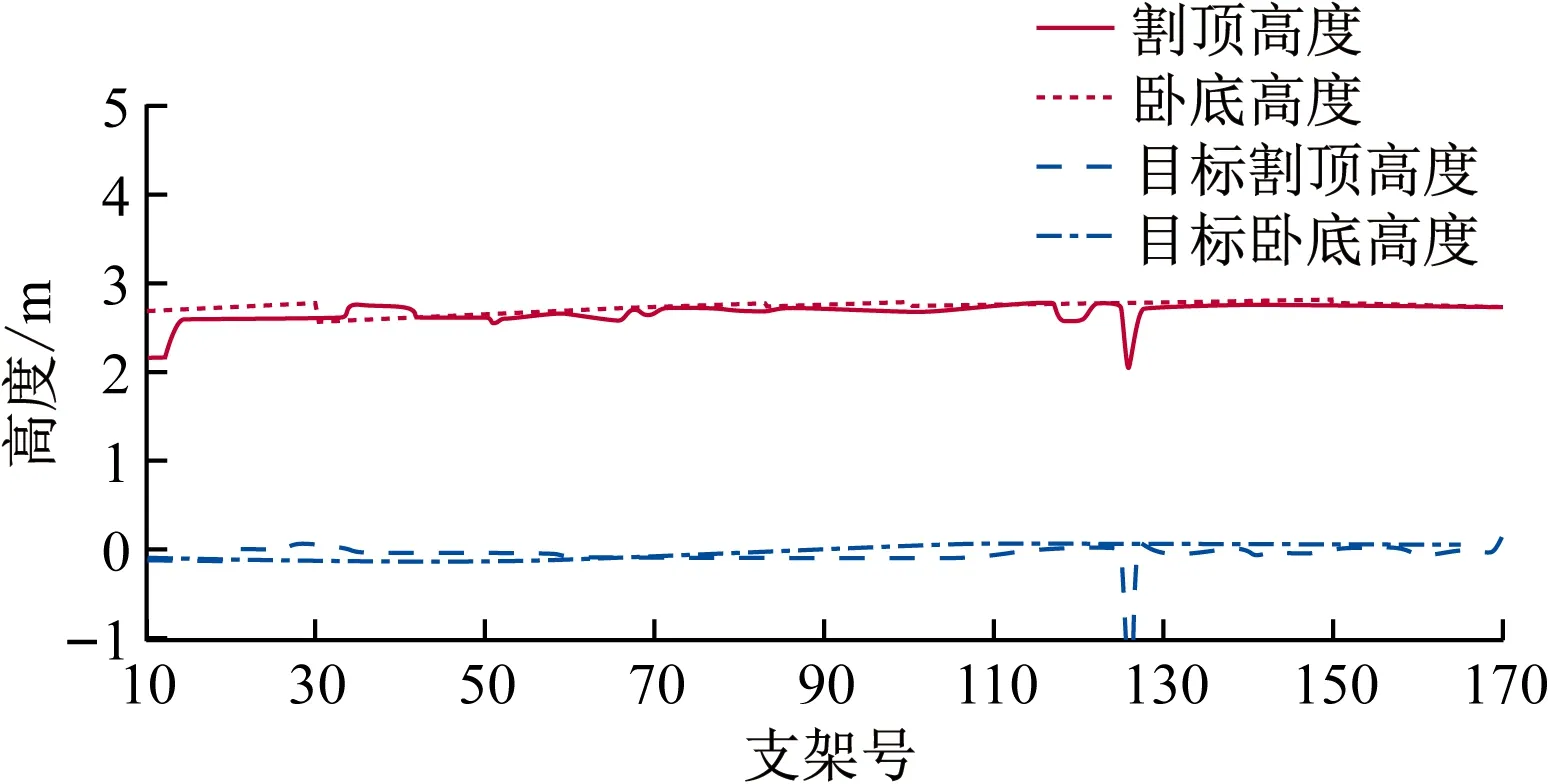
圖10 采煤機截割規劃曲線與實際截割曲線對比
通過多刀截割訓練后,采煤機按照基于三維數字煤層規劃的截割曲線在250 m長的工作面(含三角煤)進行自動截割,自動截割執行結果如圖11所示。從圖11可看出,采煤機實現了整刀的自動化截割,截割時間為16:03—17:05,即整刀規劃截割耗時大約1 h;16:03—16:32和17:05—17:36兩個時間段為割三角煤時間段,表明自動割三角煤的時間大約為30 min。
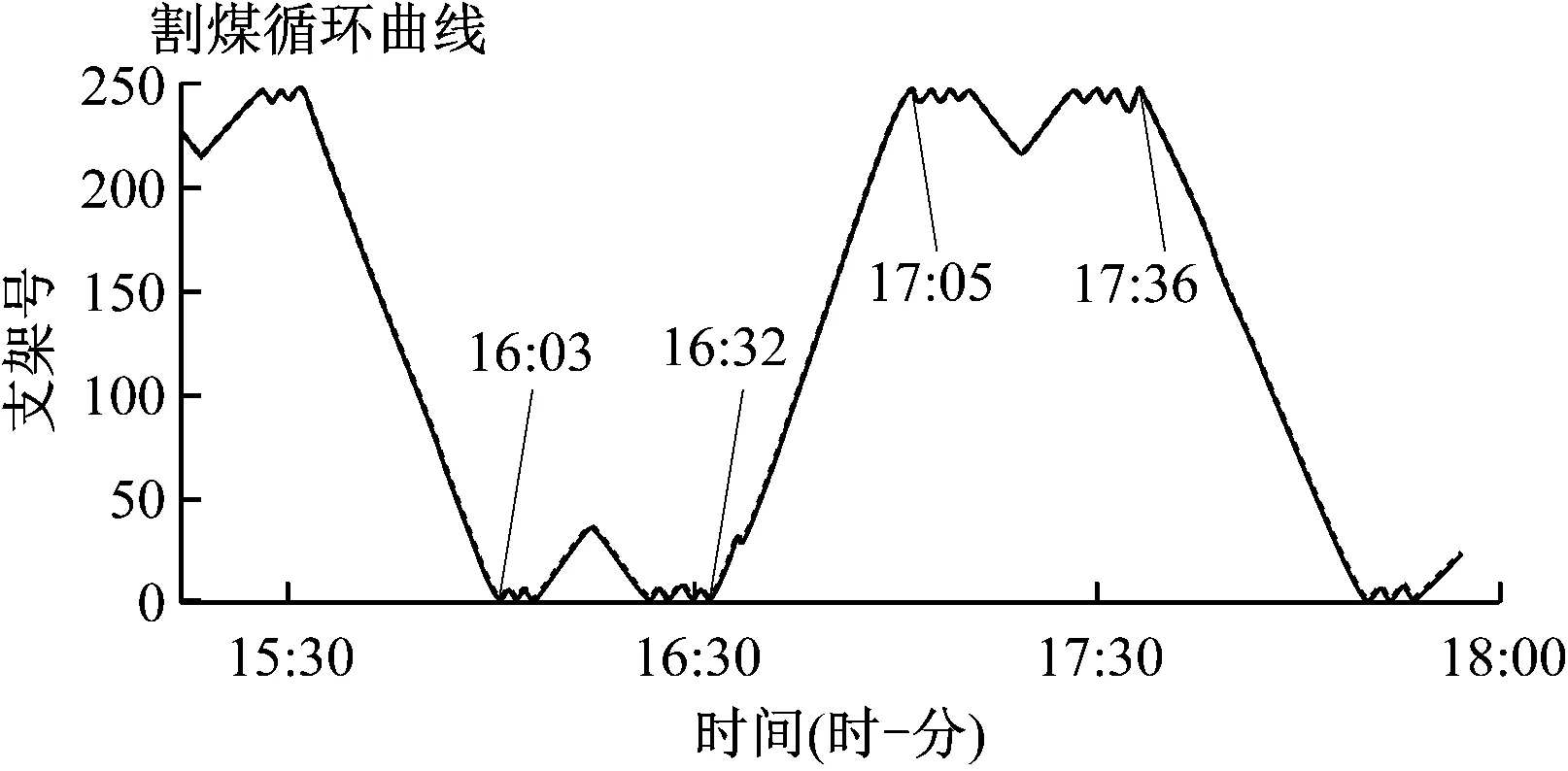
圖11 根據規劃曲線自動截割執行結果
3.3 液壓支架自動調直試驗
該精準開采系統通過遠程監測監控平臺下發規劃的每臺液壓支架推移行程信息給液壓支架控制器,從而實現液壓支架自動調直。液壓支架自動調直的監測軟件界面如圖12所示,顯示了采煤機的位置信息、姿態信息、當前刀調直后的檢測曲線和當前刀前面5刀調直后的直線度檢測曲線。從圖12可看出:該精準開采系統實現了綜采工作面液壓支架自動調直控制,當前刀前面5刀調直后的曲線基本接近直線,說明該系統對綜采工作面液壓支架具有良好的自動調直效果。
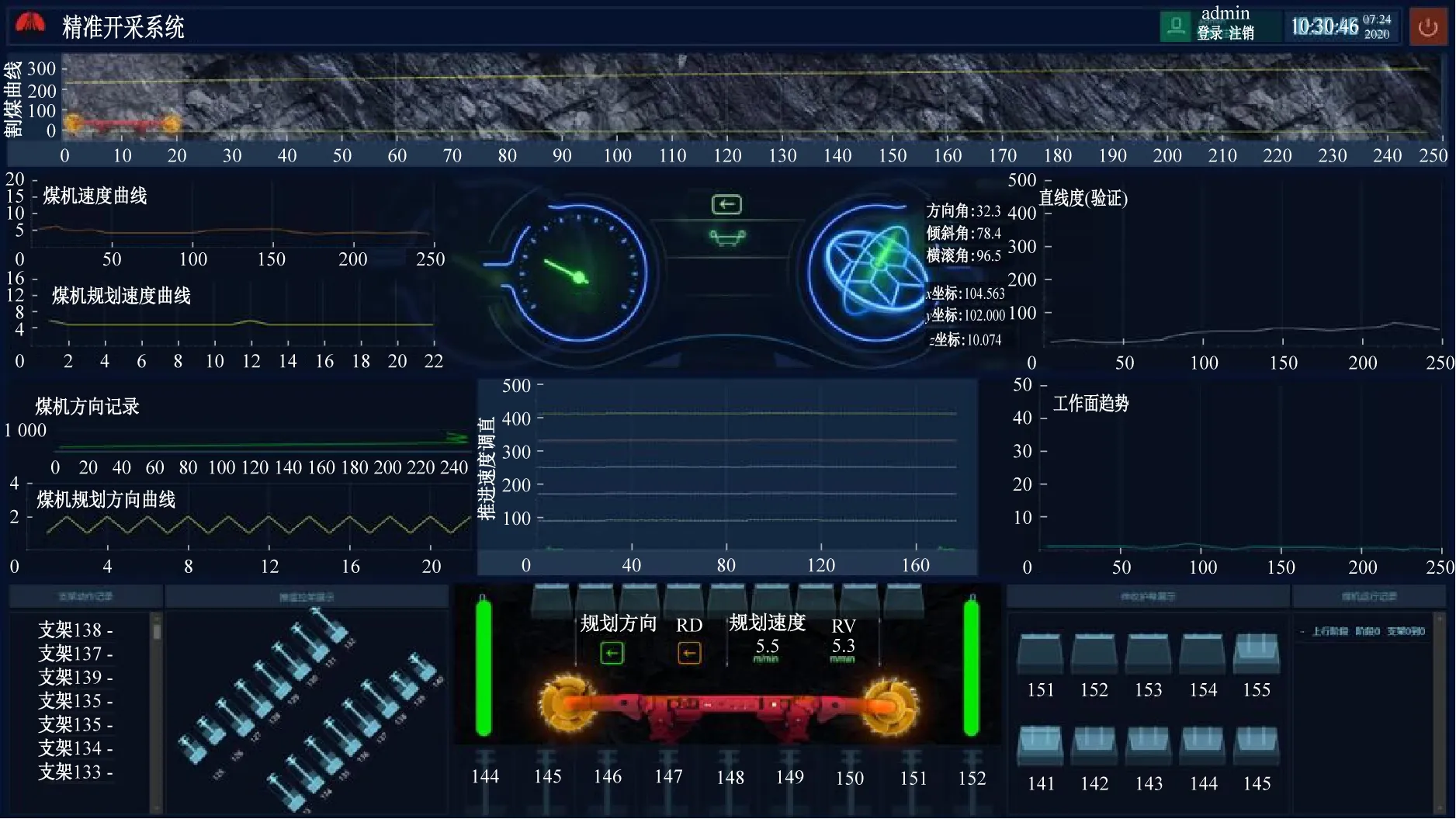
圖12 液壓支架自動調直的監測軟件界面
4 結論
(1)利用煤礦地質數據、工作面切眼數據和工作面運輸巷與回風巷地質寫實數據及三次樣條插值方法建立了初始三維數字煤層模型。通過綜采設備慣性導航系統、里程計、雷達、角度傳感器等動態感知采煤機實際行走軌跡和截割軌跡,對建立的三維數字煤層模型進行動態修正和生成刮板輸送機直線度檢測曲線。根據三維數字煤層模型動態規劃采煤機截割軌跡曲線,指導采煤機根據煤層厚度變化自動調高控制;將規劃的下一刀每臺液壓支架推移行程信息傳送給綜采工作面液壓支架控制系統,實現液壓支架自動調直。
(2)該精準開采系統通過三維數字煤層模型的CT切片可以獲取采煤機規劃刀的截割軌跡,從而實現采煤機截割軌跡的動態規劃,規劃的截割軌跡誤差小于0.2 m。
(3)該精準開采系統實現了采煤機截割軌跡的實時檢測,并對規劃的采煤機截割軌跡具有良好的自動跟蹤效果,在無人工干預情況下,對于250 m長的工作面,自動化割煤時間大約為1 h,自動割三角煤時間大約為30 min。
猜你喜歡
保健醫苑(2022年5期)2022-06-10 07:46:12
防爆電機(2022年1期)2022-02-16 01:14:06
小哥白尼(趣味科學)(2021年8期)2021-11-20 06:08:04
模具制造(2019年3期)2019-06-06 02:10:54
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
中國工程咨詢(2016年4期)2016-02-14 07:28:28
航天器工程(2014年5期)2014-03-11 16:35:55
河南科技(2014年18期)2014-02-27 14:14:58