基于虛擬現實技術的無人機遠程激光裝置高質量成像方法
2021-11-30 06:05:36吳建美
內蒙古民族大學學報(自然科學版) 2021年5期
關鍵詞:高質量
吳建美
(福州軟件職業技術學院,福建 福州 350005)
0 引言
無人機在軍事和民用領域發揮著非常重要的作用.可長時間進出各種危險空域,具有體積小、結構簡單、維護方便、靈活性好等優點[1-2].然而,無人機的駕駛和正常使用是一個復雜的過程[3-4],無人機目標成像過程較為復雜.
徐偉等[5]以實現遙感衛星設計和多光譜成像為研究對象,根據星載一體化理念和多模式成像理念,完成衛星相關指標、方案和關鍵技術設計和多模式下光學成像.實驗結果表明,該技術完成過程簡單,但存在成像質量較差的問題.蘭富洋等[6]以剪切光束成像技術為依據,在二維成像模型基礎上構建三維目標成像模型,同時根據所建模型分析兩剪切光和參考光之間頻差對目標成像產生影響.實驗結果表明,該技術成像后質量較高,但存在成像過程靈活性差的問題.張馳等[7]以解決計算機視覺相關問題為目標,從4個角度分析光場成像技術進展:光場成像設備作為視覺傳感器存在的優勢與劣勢;光場相機是計算機視覺傳感器標定和解碼與預處理的一種渠道;四維光場下圖像渲染及重建方法;將四維光場信息數據當作成像特征表征方式.實驗結果表明,該技術下成像過程穩定性較好,但存在成像耗時長的問題.
成像技術在遙感、醫學等方面均有著十分廣泛的應用[8-9].為了解決成像質量低、成像過程靈活性差和成像耗時長的問題,提出基于虛擬現實技術的無人機遠程激光裝置高質量成像方法.
1 基于虛擬現實技術的無人機遠程激光裝置高質量成像
1.1 無人機遠程激光裝置高質量成像抗干擾設計
利用遠程激光技術實現無人機遠程激光裝置高質量成像過程中,激光在大氣傳輸會受到很多因素干擾,影響成像質量和成像效率[10-12].為降低遠程激光成像的誤判率,提升成像質量和效率,設計抗干擾單元.無人機遠程激光裝置高質量成像抗干擾單元主要是在遠程激光發射與接收2個位置進行信號的編碼,能夠基于不同成像條件實現特定激光信息編碼,進而達到比較好的成像效果.在該模塊中,對激光信號實施二進制編碼操作,其中,1代表發射1個激光,0代表不發射激光.接收回波信號過程中信號放大設備能夠讀取最開始發射時的信息編碼,假設回波編碼信息匹配程度低,則不將其當作有效回波信號.圖1中,編碼信號是1,0,1,0,0,在接收系統中,假設回波信號調制編碼不是1,0,1,0,0,那么將其當作無效的回波信號;反之,假設回波信號編碼為相同的,則能夠繼續進行成像,以此避免干擾因素對成像過程的影響.

圖1 編碼信號原理 Fig. 1 Principle of coded signal
1.2 無人機遠程激光裝置高質量成像
基于1.1抗干擾設計,利用遠程激光完成無人機遠程激光裝置高質量成像.遠程激光成像主要以空間幾何為依據實現,激光經過物體而產生反射,并在攝像機畫面上形成一個像點,像點會隨著激光與物體之間的距離不同,在傳感器上來回移動,以此提升成像過程的靈活性.
為了滿足無人機遠程激光裝置高質量成像需求,在此采用一種線性結構遠程激光,在成像時向被測對象投射一個激光條,因物體表層的曲率不同,相機拍攝時的光線中心也不同.利用線結構激光,能夠得到激光條上相應點位置信息.圖2為遠程激光成像模型.
在遠程激光成像中,需要先考慮處在水平面上激光點A,利用計算激光點在投影平面產生的像素點x的值,能夠得到點A至遠程激光成像體系平面上距離d和照射點至板面中心距離L.RtΔABC與RtΔDEC在一個平面,角ACB和角DCE相等,根據三角形相似可知ΔABC和ΔDEC相似,進而可得:

其中,依據圖2中存在的等量關系能夠得到式(2)和式(3):

圖2 遠程激光成像模型Fig. 2 Remote laser imaging model


其中,s代表激光到相機中心距離,f代表相機焦距,ω代表相機像素值,N代表圖像橫向像素數量.
根據上述計算,能夠得到距離d與L表達式:

針對水平面之外的點A′,引入補償角γ.在遠程激光成像過程中,A與A′ 至板面中心產生的夾角和至相機中心產生的夾角α近似,則有:

依據式(6)可知:

其中,y代表投影點A′ 在相機畫面中占據的行數,N′ 代表圖像縱向像素數量.
得到補償角γ之后,能夠獲取點A′ 至成像中心之間的距離L′.以此類推,能夠獲取激光帶上隨機點至成像中心之間的距離:

利用操控舵機轉動角ε,將板面中心軸作為轉動軸,以此帶動遠程激光相機實現距離深度測量,進而得到光點在空間坐標中三維坐標,通過三維坐標可準確定點成像位置,完成無人機遠程激光裝置高質量成像.

其中,θ代表照射點到中心和遠程激光成像平面產生的夾角,ε代表遠程成像采集板面與橫軸產生的夾角.
基于式(10)的計算,得到的最終成像結果可表示為:

1.3 無人機遠程激光裝置高質量成像結果優化
為了使成像結果更好地呈現,需要對成像結果進行處理.在此,利用圖像分割法處理成像結果,使圖像區域劃分明確,特征點更加突出.
當前,比較常見的圖像分割方式有:以圖像灰度特性為依據的方差法,還有以圖像方向信息為依據的方向圖法.其中的方差法比較適合分割背景區域,對于灰度變化比較小的區域,該方法有誤判現象.方向圖法對變化較小區域有著比較好的分割效果,但背景區域分割效果不是十分理想.在無人機遠程激光裝置高質量成像結果處理中,將方向圖法與方差法結合,然后通過簡單閾值法將邊緣效應消除,最終得到較為理想的圖像分割效果.詳細分割過程如下:
假設z(i,j)代表無人機遠程激光裝置高質量成像結果中各塊灰度方差,g(i,j)代表無人機遠程激光裝置高質量成像結果中各個像素點灰度值,a(i,j)代表根據方向圖法分割之后無人機遠程激光裝置高質量成像結果中各個像素點灰度值,b(i,j)代表根據方差法分割之后成像結果中各像素點灰度值,c(i,j)代表通過簡單閾值法分割之后成像結果中各像素點灰度值,G(i,j)代表根據結合法分割之后成像結果中各像素點灰度值,即最終分割結果.
根據上述參數設置則有:

式(12)中,V代表灰度方差閾值,在成像結果分割實現中,將該值取值設置為無人機遠程激光裝置高質量成像結果中各塊灰度方差均值.R代表灰度閾值,該值取值為無人機遠程激光裝置高質量成像結果平均灰度值.
2 實例測試與分析
為驗證基于虛擬現實技術的無人機遠程激光裝置高質量成像方法有效性,測試選用無人機如圖3所示,實驗場地為某無人機試飛區.

圖3 測試選用無人機Fig. 3 UAV selected for experiment
實驗之前的準備工作為:確保各個實驗需要的傳感器能夠正常獲取數據;將計算機控制系統開啟;初始化調試體系;對相機進行白平衡操作;開啟激光.
準備工作完成后,成像前,為使成像結果更為精確,要將整個成像體系標定好,保障所得數據為有效數據.
依據上述實驗環境設定,在以下方面驗證所提技術:
(1)成像結果質量;(2)成像過程靈活性;(3)成像耗時.
實驗結果如下:
由圖4可知,基于虛擬現實技術的無人機遠程激光裝置高質量成像方法下的成像結果有效像素數量要高于當前相關研究成果,這表示該技術具有很高的可靠性.該技術在成像之前,分析了成像過程中存在的干擾因素,并設計了抗干擾模塊,初步增強了成像質量,以抗干擾設計為基礎,通過遠程激光技術完成了無人機遠程激光裝置高質量成像,為了進一步提升成像結果質量,將方向圖法與方差法結合,通過簡單閾值法將邊緣效應消除,以此得到的成像結果更為理想.
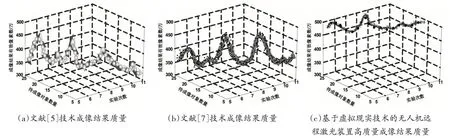
圖4 不同技術成像結果質量對比Fig. 4 Quality comparison of imaging results of different technologies
分析圖5,所提技術運行過程靈活性明顯優于文獻[6]技術和文獻[7]技術,因為該技術以空間幾何為成像依據,激光經過物體而產生反射,會在攝像機畫面上形成一個像點,而像點會隨著激光與物體之間的距離不同,在傳感器上自適應性地來回移動,該智能性操作有效提升了無人機遠程激光裝置高質量成像過程的靈活性.
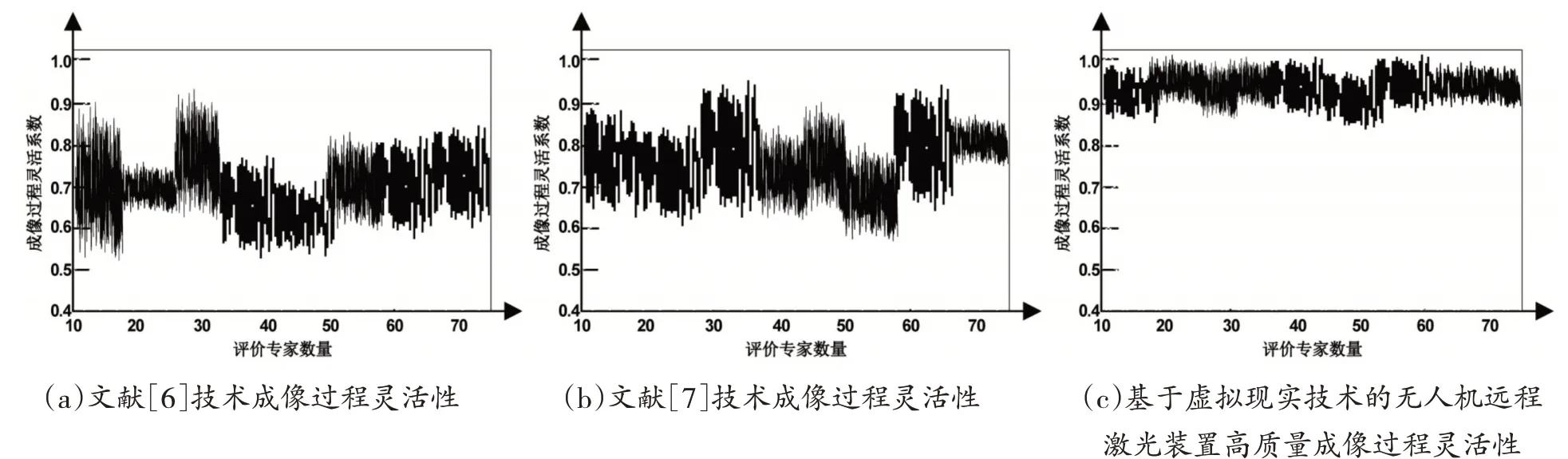
圖5 不同技術成像過程靈活性對比Fig. 5 Comparison of flexibility of imaging process of different technologies
表1中,H1代表待成像對象編號.H2代表文獻[7]技術成像耗時,單位為s.H3代表文獻[5]技術成像耗時,單位為s.H4代表基于虛擬現實技術的無人機遠程激光裝置高質量成像方法成像耗時,單位為s.

表1 不同技術成像耗時對比Tab. 1 Comparison of imaging time of different technologies s
從表1中可以看出,基于虛擬現實技術的無人機遠程激光裝置高質量成像方法整體運行耗時最短,因為該技術考慮到無人機遠程激光裝置高質量成像過程中,激光在大氣傳輸時會受到眾多因素干擾,降低成像效率,設計了成像過程抗干擾模塊,以此減少成像耗時,增強成像性能.
3 結論
提出基于虛擬現實技術的無人機遠程激光裝置高質量成像方法.分別通過抗干擾設計、遠程激光成像、處理成像結果完成整個無人機遠程激光裝置高質量成像過程,并通過實驗證明了所提技術的有效性.
針對下一步研究,提出以下建議:數據采集是激光成像中的重點內容,可引入GPS等技術更多地采集無人機運行環境信息數據,以提升無人機遠程激光裝置高質量成像精度;數據處理和匹配是得到高質量成像結果的重中之重,可結合性能較為優越的數據處理方法和匹配算法,進一步完善成像技術.
猜你喜歡
江蘇安全生產(2024年3期)2024-04-10 09:01:22
公民與法治(2022年11期)2022-12-06 02:27:36
公民與法治(2022年3期)2022-07-29 00:57:14
當代陜西(2022年5期)2022-04-19 12:10:12
活力(2021年4期)2021-07-28 05:34:26
當代陜西(2021年1期)2021-02-01 07:18:02
石油化工管理干部學院學報(2020年5期)2020-12-14 07:02:20
當代陜西(2020年20期)2020-11-27 01:43:10
中國煤炭工業(2019年5期)2019-11-04 00:53:34
福建基礎教育研究(2019年3期)2019-05-28 23:47:21