基于神經網絡的無刷直流電機故障診斷研究
2021-11-28 00:58:08董一漢朱建光
電腦知識與技術 2021年30期
關鍵詞:故障診斷
董一漢 朱建光
摘要:該文的目的是對無刷直流電機的早期故障:匝間短路、轉子退磁進行診斷。通過對故障機理進行分析,該文選用無刷直流電機的三線端電流信號與母線端的電流信號作為診斷信號,通過對負載轉矩的控制采集電機在正常狀態、匝間短路、轉子退磁三類狀況下的數據,將數據制作成數據集然后利用深度殘差網絡進行模型的訓練。在測試集上模型的精度可以達到94%。實驗結果證明,利用無刷直流電機的三相端電流信號與母線端電流信號,可有效訓練深度殘差網絡從而進行電機的故障診斷。
關鍵詞:匝間短路;轉子退磁;無刷直流電機;殘差網絡;故障診斷
中圖分類號:TP393? ? ? ? 文獻標識碼:A
文章編號:1009-3044(2021)30-0111-03
開放科學(資源服務)標識碼(OSID):
1 引言
無刷直流電機以其自身特有的優勢廣泛的應用在生產與生活之中[1],但是由于人為、環境等因素可能導致電機故障的發生,因此及時的發現電機的早期故障對設備的可靠運行及使用者的安全具有重要的意義[2]。
無刷直流電機的故障診斷流程一般分為三部分:一是信號采集;二是信號處理;三是模式識別[3]。信號的采集一般是電機外殼的振動信號、電機三相端的相電流相電壓信號、電機母線端的電流電壓信號、溫度等[4]。信號的處理在時頻域上會使用到傅里葉變換、小波變換等,通過這些方式來提取信號的時頻域特征[5]。模式識別階段可以使用專家庫、決策樹、神經網絡等方式來對故障特征分類從而實現電機的故障診斷[6]。
近些年來,CNN網絡在各類分類任務中大放異彩也越來越廣泛的使用在設備故障診斷中[7]。CNN的優點主要有:(1)它不同于傳統的特征提取方式,不需要引入人工的干預,利用CNN自身特進行特征提取自動學習;(2)模型的遷移性強,可快速部署到類似領域[8]。
本文構造了一種殘差結構的卷積神經網絡模型進行無刷直流電機故障分類,數據采集部分采集了電機的三相端電流信號及母線端電流信號,故障的診斷類別是無刷直流電機的轉子永磁體退磁故障和繞組匝間短路故障。
2 故障機理分析
2.1 匝間短路模型
匝間短路發生在定子的三相繞組上,當此類故障發生時短路部分可以等效為電阻與電感的串聯,當電機永磁體的旋轉時,短路部分受到轉子永磁體磁場影響會形成短路電流,這個電流會產生一種電磁制動轉矩從而影響電機系統的穩定性。該狀態下的電壓平衡方程如下。
[uA=iAR1+L1diAdt+M0di0dt+M3diBdt+M4diCdt+e1uB=iBR2+L2diBdt+M1di0dt+M3diAdt+MdiCdt+eBuC=iCR3+L3diCdt+M2di0dt+M4diAdt+MdiBdt+eC]
式中[M]是正常繞組間的互感;[M0]為短路部分的電感與未短路電感的互感;[M1]和[M2]分別是B、C兩路電感與短路部分的互感;[M3]和[M4]分別是B、C兩路電感與未短路部分的互感;[L2]和[L3]與[R2]和[R3]是B、C相繞組的自感與電阻值;[uA]、[uB]、[uC]是三相電壓;[iA]、[iB]、[iC]是三相電流;[i0]是短路電流。
對短路電路分析其平衡方程如下。
[-i0R0=L0di0dt+M0diAdt+M1diBdt+M2diCdt+e0]
電機的制動轉矩公式如下。
[Te0=e0i0Ω]
電機驅動部分的轉矩方程如下。
[T′e=e1iA+eBiB+eCiCΩ]
電機電磁轉矩方程如下。
[Te=e1iA+eBiB+eCiC-e0i0Ω]
轉子運動方程如下。
[Te-TL-fΩ=JdΩdt]
其中阻尼系數為f,轉子轉動慣量為[J],負載轉矩為[TL]。
由上述公式分析可知,電機的負載轉矩與繞組相電流間存在著復雜的非線性關系,且由于制動轉矩的影響會間接導致電機的各類參數變化,基于這些關系后續設計了關于控制負載轉矩變化的數據采集策略。
2.2 轉子退磁模型
無刷直流電機的轉子是永磁體材料,隨著電機的高負荷運轉,材料自身的缺陷會被放大,若遇到短時溫升(渦流或匝間短路)當這種溫升超過材料的居里溫度會造成永磁體的退磁。
無刷直流電機的相感應電勢是轉子磁體的旋轉引起的,單相的感應電勢與轉子角速度[Ω]和永磁體轉子位置函數[Φ]的關系如下所示。
[eA=-ΩdΦdt]
轉子位置函數[Φ]與磁通[φx]關系如下所示。
[Φx=K?x]
空間磁密分布[Bθ]與磁通[φx]的關系如下所示。
[?x=-π2+xπ2+xBθSdθ]
式中線圈所圍面積為S。
電機的電磁轉矩方程如下所示。
[Te=e1iA+eBiB+eCiCΩ]
由上述公式分析可知,由電機的轉矩方程出發,當各類參數保持穩定的情況下,轉子永磁體材料的退磁會導致轉矩的降低。永磁體的退磁會通過對相反電勢的影響而間接影響到轉矩與相電流,基于這些關系后續設計了并結合匝間短路的分析制定了后續控制轉矩變化的數據采集策略。
3 實驗及數據分析
3.1 實驗平臺
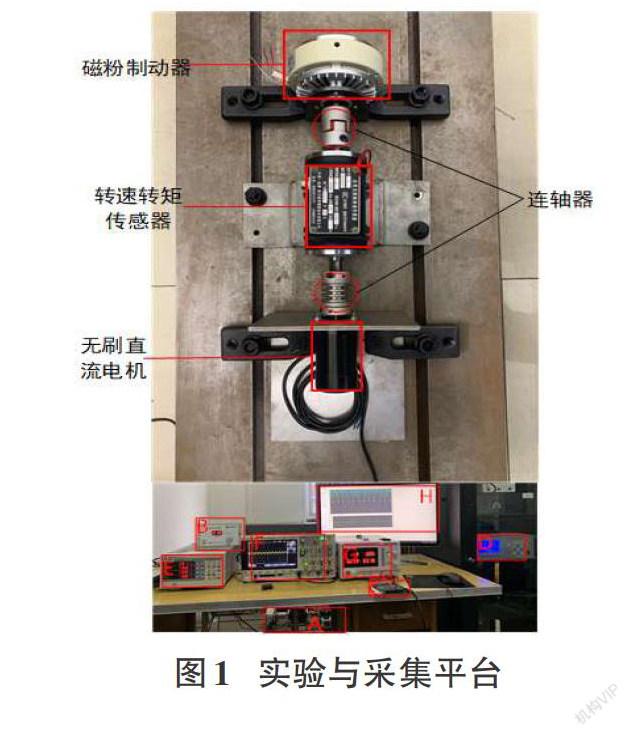
本文的實驗方案是控制變量法的電機數據采集實驗,控制負載轉矩采集三相電流與母線電流的信號。實驗平臺主要由兩部分組成,一部分是無刷直流電機的轉動實驗平臺另一部分是無刷直流電機的監控與采集平臺,如圖1所示。
轉動實驗平臺由無刷直流電機、轉速轉矩傳感器、磁粉制動器組成,這些器件間使用聯軸器連接。無刷直流電機的監控與采集平臺通過調節磁粉制動器的制動轉矩來采集各類穩態工況下的電機三相端及母線端的電流信號數據。圖中C是數據采集卡,其采樣頻率是40k,母線端電流與繞組端三相電流經霍爾傳感器放大后傳輸到采集卡上。實驗通過控制磁粉制動器的制動轉矩來實現不同工況下信號的采集。
3.2 采集策略
數據的采集策略是控制磁粉制動器的輸出轉矩,采集不同故障下的三相電流與母線電流信號。采集卡的采集設置為20s,采樣頻率40k。分別采集無刷直流電機正常狀況、匝間短路、轉子退磁三類狀況下的電流信號。在每類狀況下,按照從小到大調節磁粉制動器的輸出制動轉矩,使得電機的工作電流穩定在額定最大電流區間內,采集各類工況下的電流數據。依據控制磁粉制動器輸出策略的數據采集實驗記錄表如表1所示。
表1是匝間短路狀態下部分試驗記錄,隨著張力控制器的輸出電流增加母線電流與轉矩也隨之增加,電機的轉速不斷下降。依據同樣的控制變量策略,健康的數據采集實驗記錄表如表2所示。
分析表1表2對比可知,當電機發生匝間短路故障時,同樣的負載轉矩下電機的母線端電流變大了、轉速降低了。
3.3 數據分析及數據集的建立
3.3.1 數據分析
由前述的數學模型以及實驗的記錄表可知電機的電流中蘊含著故障的信息,現就電機正常狀態、匝間短路與轉子退磁三類狀況下的數據進行簡單分析。電機三類狀態的示意圖如圖5所示。
圖2中(a)(b)分別是電機正常狀態下的單相電流波形和母線電流波形;(c)(d)分別是電機在匝間短路狀態下的單相電流波形與母線電流波形;(e)(f)分別是電機在轉子退磁狀態下的單相電流波形與母線電流波形。在控制負載轉矩的方法下,不同狀態下的相電流的與母線電流均有較大差異
3.3.2 數據集建立
(1)數據擴充
深度學習的訓練需要大量的數據,對此本文使用50%重疊的滑動窗口進行數據的擴充。數據來源于數據采集卡的采集程序,對程序進行初步的預處理,利用Python讀取后選定滑動窗口大小為10000,滑動步長為5000,每類工況的采集時間是20s采樣平率40k,滑動窗口處理每類工況可劃分出79個尺寸為(4,10000)的窗口矩陣。
(2)基于TFRecord的數據集建立
數據集包括兩部分,一部分是訓練數據一部分是數據的標簽。本文的訓練數據是擴充好的窗口數據,標簽是獨熱碼形式的類別,正常狀態的獨熱碼為[1,0,0]、匝間短路狀態下的獨熱碼為[0,1,0]、轉子退磁狀態下的獨熱碼為[0,0,1]。
數據集的實現是基于Tensorflow,將每個窗口文件和其對應的標簽轉換為tf.train.Example對象,最后通過預定義的tf.io.TFRecordWritter方法寫入到TFRecord文件。
4 故障識別算法
4.1 卷積神經網絡
本文的數據是時間序列的傳感器數據,卷積神經網絡作為一種優秀的處理網格數據的網絡結構廣泛的應用于各個領域之中。卷積過程如下述公式所示[9]。
[Oyij=gbij+ml=0LiwlijmOy+1j-1m]
其中[j]表示特征圖序號,[i]表示網絡的層數。[Oyij]表示特征圖中的第[y]個位置的特征值;激活函數[g];偏置[bij];[m]表示輸出特征數據的序號;[wlijm]表示到第[m]特征圖的卷積核中第[l]位置的權重值。
本文的激活函數是整流線性單元(Relu)。
[gz=max0,z]
損失函數選擇的是交叉熵損失函數。
[Ht,s=xtxlogqx]
4.2 殘差網絡的模型設計及分析
4.2.1 模型結構
殘差結構是一種結構是通過添加恒等映射層來解決網絡深度的提升所帶來的模型退化的問題, 殘差塊的輸出[y]可表示為如下數學關系。
[y=fx+x]
模型以卷積塊為基礎結構,在構建了三個殘差塊的卷積神經網絡。殘差塊內部第一層卷積的卷積核尺寸是7,濾波器數量是64,填充方式是same,第二層與第三層與第一層一致,最后經過1x1卷積核輸出。池化利用全局池化。最后模型經Flatten層拉伸后經全連接網絡診斷輸出。
4.2.2 模型診斷
模型的診斷前需要先進行模型的訓練。將數據集送入模型中,根據損失函數的值不斷反向傳播調整權重,當模型的迭代步數到達上限,選取最優的一組權重參數。
將數據集喂入一維卷積核CNN得到訓練集與測試集的準確率及損失函數曲線如圖3所示。圖中黃色是測試集,藍色是訓練集。模型經過訓練集的訓練在訓練集上的準確率接近100%,在測試集上的表現接近94%。
整個系統運行時,采集系統采集傳感器信號,診斷時,對數據預處理并后輸入訓練好的模型即可對電機的故障進行診斷。
5 結論
本文針對無刷直流電機的匝間短路與轉子退磁故障進行了數學及實驗分析,利用無刷直流電機的三相電流與母線電流作為診斷信號,在卷積神經網絡的優秀特性的基礎上,引入了殘差結構,實現了卷積神經網絡在無刷直流電機故障診斷中的應用。實驗證明殘差結構的卷積神經網絡可以很好的診斷無刷直流電機的匝間短路與轉子退磁故障。
參考文獻:
[1] 張琛.直流無刷電動機原理及應用[M].北京:機械工業出版社,1996.
[2] 王驍賢,張保華,陸思良.基于連續小波變換和卷積神經網絡的無刷直流電機故障診斷[J].機械與電子,2018,36(6):29-32.
[3] 沈艷霞,紀志成,姜建國.電機故障診斷的人工智能方法綜述[J].微特電機,2004,32(2):39-42.
[4] 卞皓,王曉琳,鄧智泉.基于定子電流的無刷直流電機軸承故障診斷[J].南京航空航天大學學報,2020,52(2):224-231.
[5] 賀昌權.基于小波變換的無刷直流電機智能故障診斷的研究[D].蘭州:蘭州理工大學,2009.
[6] 唐建湘,陳特放,成庶,等.牽引電機故障診斷專家系統的研究[J].計算機測量與控制,2007,15(5):595-598.
[7] Eren L,Ince T,Kiranyaz S.A generic intelligent bearing fault diagnosis system using compact adaptive 1D CNN classifier[J].Journal of Signal Processing Systems,2019,91(2):179-189.
[8] Anwar S,Hwang K,Sung W.Structured pruning of deep convolutional neural networks[J].ACM Journal on Emerging Technologies in Computing Systems,2017,13(3):1-18.
[9] 李彥冬,郝宗波,雷航.卷積神經網絡研究綜述[J].計算機應用,2016,36(9):2508-2515,2565.
[10] He K M,Zhang X Y,Ren S Q,et al.Deep residual learning for image recognition[C]//2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR).June 27-30,2016,Las Vegas,NV,USA.IEEE,2016:770-778.
【通聯編輯:代影】
猜你喜歡
一重技術(2021年5期)2022-01-18 05:42:10
水泵技術(2021年3期)2021-08-14 02:09:20
裝備制造技術(2020年3期)2020-12-25 05:22:30
制造技術與機床(2018年11期)2018-11-23 01:07:42
電子制作(2018年10期)2018-08-04 03:24:46
制造技術與機床(2017年10期)2017-11-28 05:20:43
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
振動工程學報(2014年2期)2014-03-01 01:15:22
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
振動、測試與診斷(2014年4期)2014-03-01 01:14:00