基于三維模型的懸臂式掘進機自適應截割技術研究
2021-11-28 20:30:26孫常軍魏民石泉鄭洪濤盧新明
今日自動化 2021年8期
孫常軍 魏民 石泉 鄭洪濤 盧新明

[摘 ? ?要]為了解決懸臂式掘進機在我國煤炭工業生產中多年來存在的問題,提高智能控制技術水平,分析了目前遠程可視化技術、記憶截割技術和自動截割技術等智能控制技術的控制原理和存在問題,提出了一種基于三維模型的懸臂式掘進機自適應截割技術,通過在山東能源新汶礦業集團翟鎮煤礦11502W軌道巷進行了8個月的現場測試,驗證了該技術能夠滿足掘進機智能控制和煤礦井下掘進作業的要求。
[關鍵詞]懸臂式掘進機;三維模型;自適應截割技術
[中圖分類號]TD421.5 [文獻標志碼]A [文章編號]2095–6487(2021)08–00–03
[Abstract]In order to solve the problems of cantilever roadheaders in my country's coal industry for many years and improve the level of intelligent control technology, firstly, the control principles of intelligent control technologies such as remote visualization technology, memory cutting technology and automatic cutting technology are analyzed. And there are problems, and then proposed a three-dimensional model-based cantilever roadheader adaptive cutting technology, through 8 months of field testing in Shandong Energy Xinwen Mining Group Zhaizhen coal mine 11502W track lane to verify the technology It can meet the requirements of intelligent control of roadheader and underground tunneling operations in coal mines.
[Keywords]cantilever roadheader; three-dimensional model; adaptive cutting technology
在我國的煤炭工業生產中,懸臂式掘進機作為一種廣泛使用的采掘設備,占有極其重要的地位。懸臂式掘進機的技術發展和進步對于發展綜合機械化掘進、提高掘進效率、保障礦井安全生產以及降低工人勞動強度具有重要意義。雖然我國掘進機已有長足發展,但是還存在如下問題[1]:
(1)未能解決自身定位和自動定向的問題。
(2)操作自動化水平較低,掘進機巷道截面截割主要是人工操作,截割頭運動路徑依靠工人目測和經驗控制,截割精度低。
(3)截割臂擺速手動控制期間,擺速低時會導致截割效率低下,擺速大時遇上夾矸會導致截齒和擺動油缸損壞,最終導致截割電機使用壽命降低。
(4)不能實現遠程遙控作業,因而難以實現掘進綜掘工作面的少人化和無人化,特別是掘進高突(瓦斯突出、水突出等)工作面時存在嚴重的安全隱患。
(5)掘進面工作環境惡劣,用工人數多,勞動強度大,工作效率低,安全隱患多。
為了解決以上問題,多年來許多專家學者致力于掘進機智能控制技術的研究,提出了遠程可視化技術、記憶截割技術和自動截割技術等智能控制技術,但受煤礦井下極其復雜、惡劣的現場環境影響,以及工人文化程度低、技術水平差等客觀因素制約,在掘進工作面生產現場卻無法正常應用。本文先分析了遠程可視化技術、記憶截割技術和自動截割技術等智能控制技術的控制原理和存在問題,然后提出了一種基于三維模型的懸臂式掘進機自適應截割技術,詳細介紹了控制原理和實現方法,能夠滿足掘進機智能控制和煤礦井下掘進作業的要求。
1 遠程可視化技術
1.1 控制原理
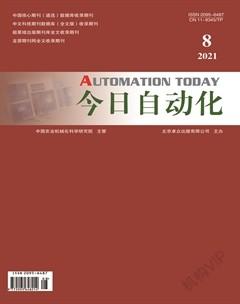
整個遠控系統由遠控站和主控站兩大部分組成,兩者之間通過交換機進行信息的交互。操作員通過視頻監視器觀察井下掘進機工作運行和周圍環境情況,通過工況監視器觀察掘進機工作狀態參數,根據實際需要操作相應的手柄,把控制信號傳輸給主控站從而控制掘進機的相應動作[2]。控制原理如圖1所示。
1.2 存在問題
操作員主要是通過攝像儀來觀察井下掘進機工作運行和周圍環境情況,但是因為掘進時現場粉塵、水霧等比較大,造成在截割過程中不可視,工作效率低。同時由于無法獲取掘進機的空間位置信息以及遠程操作時存在控制系統和液壓系統的延時,操作員只能憑個人經驗與手感來調整掘進機的位置和截割頭的位置,對操作員的專業技術能力要求很高,且巷道成型效果不好。
2 記憶截割技術
2.1 控制原理
記憶截割的控制過程分為2個部分:人工示范和記憶自動截割。人工示范過程:操作員運用操作手柄依據工作現場的工作狀況操作掘進機進行截割示范,PCC把采集記錄下來的相關路徑信息傳輸給智能工控面板。記憶自動截割過程:智能工控面板根據記錄的相關路徑信息,對其進行路徑擬合和優化,然后規劃出最優化的記憶自動截割路徑并且發出控制指令,傳輸到PCC后根據優化后人工示范的路徑控制回轉及升降油缸進行記憶自動截割。同時,回轉及升降油缸和截割電機電流傳感器對記憶自動截割運行情況進行實時檢測,進而實現其反饋控制[3]。控制原理如圖2所示。
2.2 存在問題
記憶截割一般都是人工示范階段控制器根據設定的時間間隔或者是距離間隔對截割過程中的截割數據進行存儲,主要包括截割頭的位置、截割臂擺動的速度等。由于無法獲取掘進機的空間位置信息,因此只能在掘進機機身不動的情況下使用。同時由于在巷道開采的過程中會有矸石等地質條件(地質硬度)發生變化,此時若采取同樣的截割速度可能會導致截割電機負載過大造成電機堵轉或者截割機構損壞等現象發生,因此在記憶自動截割階段還需要操作員手動進行調節改變截割進給速度,對操作員的專業技術能力要求較高。
3 自動截割技術
3.1 控制原理
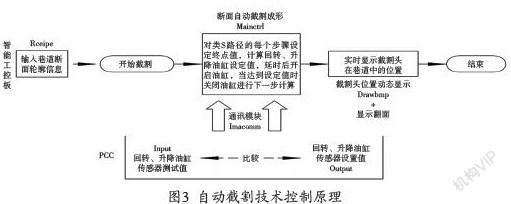
通過PCC模塊化編程,完成對懸臂式掘進機自動截割控制系統的軟件設計。在自動截割控制時智能工控面板首先存儲巷道斷面輪廓同時經由Recipe部分處理顯示,隨后Mainctrl自動截割模塊開始運轉,智能工控面板利用Imacomm部分運算來自PCC經Input部分搜尋獲得的回轉以及升降油缸運行距離,從而判斷截割頭此刻的位置,隨后通過和設定路徑比較來獲取截割頭之后抵達的位置,進而反推出回轉以及升降油缸預定值,并傳輸至PCC經由Output部分輸出控制命令,控制截割頭開始工作的同時完成實時對比,若達到預定值在停止油缸的同時執行下一截割指令,直到截割工作完成。Drawbmp部分完成截割頭運行以及結束時的位置信息并于上位機界面上顯示的工作,進而繪制出巷道中截割頭工作的動態運行軌跡[4]。控制原理如圖3所示。
3.2 存在問題
自動截割一般都是操作員根據巷道斷面輪廓信息和地質條件情況設定好截割頭的截割路徑和截割臂擺動的速度,控制器根據提前編好的程序采用閉環控制方式來調整截割頭的位置和截割臂擺動的速度,自動化程度比記憶截割技術有明顯提升,但由于無法獲取掘進機的空間位置信息,因此也只能在掘進機機身不動的情況下使用。
4 基于三維模型的自適應截割技術
4.1 控制原理
主處理器接收控制器發送的掘進機空間位置信息、方位角、位姿信息以及各油缸的位移信息,并按圖4程序流程圖編寫程序,能夠根據掘進機的空間位置變化和掘進工作面的巖壁硬度變化自動調整截割頭的運動路徑和速度(包括截割頭轉速和截割臂的擺動速度)。
控制器與掘進機上的定位裝置、慣性導航系統、各類傳感器和電磁閥連接,控制器通過定位裝置、慣性導航系統和各類傳感器采集掘進機的空間位置信息、方位角、位姿信息、各油缸的位移信息以及截割電機的電流或功率,并上傳至主處理器,還接收主處理器反饋的掘進機的截割方式、截割頭的運動路徑和速度信息,根據掘進機的截割方式、截割頭的運動路徑和速度信息,通過電磁閥控制升降油缸、回轉油缸來調整截割頭的空間位置,或控制液壓馬達驅動掘進機履帶來調整掘進機的空間位置,使截割頭切入工作面巖壁一定深度,然后通過掘進機機體的回轉運動和截割頭的升降運動,即可切割出所要求的巷道斷面形狀[5]。
控制原理如圖5所示。
4.2 實現方法
4.2.1 掘進工作面在大地坐標系下的三維模型的建立方法
建立屬性數據庫和空間數據庫,獲取掘進工作面的鉆孔數據、三維地震數據和物探數據,并存儲到屬性數據庫中;獲取物探區的地理分布、鉆孔的地理位置及巷高、巷寬等數據,存儲到空間數據庫中;根據屬性數據庫中的鉆孔數據確定掘進工作面的采掘工程平面圖;采用ArcEngine三維控件,并結合OpenGL技術,以采掘工程平面圖、屬性數據庫和空間數據庫為基礎,建立掘進工作面在大地坐標系下的三維模型。
4.2.2 掘進機截割頭在大地坐標系下的坐標計算方法
通過定位裝置對掘進機在掘進工作面巷道內的空間位置進行精確定位,來獲得掘進機的空間位置信息,計算掘進機在大地坐標系下的坐標;通過慣性導航系統獲取掘進機的方位角、位姿信息,采集掘進機的各油缸的位移信息,計算出掘進機截割頭在大地坐標系下的坐標[6]。
4.2.3 確定掘進機截割方式、截割頭的運動路徑和速度的方法
以截割頭的坐標為基礎,根據巷道斷面的大小和形狀,確定在掘進工作面的三維模型中截割頭的運動路徑和速度;利用掘進工作面的三維模型,確定煤巖的分布情況和巖壁硬度;根據煤巖的分布情況和巖壁硬度,確定掘進機的截割方式,包括左右循環向上的截割方式和由下向上左右截割方式。當巖壁的硬度小于設定閾值,屬于較軟的巖壁時,掘進機采用左右循環向上的截割方式;當巖壁的硬度大于等于設定閾值,屬于較硬的巖壁時,掘進機采用由下向上左右截割方式。
4.2.4 掘進機截割頭的截割效果的判斷方法
采集截割電機的電流或功率大小。若截割電機的電流或功率大于設定閾值,則說明截割頭截割工作面巖壁的硬度大于根據掘進工作面的三維模型所確定的巖壁硬度;若截割電機的電流或功率小于設定閾值,則說明截割頭截割工作面巖壁的硬度小于根據掘進工作面的三維模型所確定的巖壁硬度。
4.2.5 截割頭速度的修正方法
若截割頭截割工作面巖壁的硬度大于根據掘進工作面的三維模型所確定的巖壁硬度,則減小截割頭轉速和截割臂的擺動速度;若截割頭截割工作面巖壁的硬度小于根據掘進工作面的三維模型所確定的巖壁硬度,則增大截割頭轉速和截割臂的擺動速度。
4.2.6 截割頭的運動路徑的調整方法
計算掘進機的空間位置變化值,當掘進機的空間位置信息變化值大于設定閾值,使得截割頭位置無法接觸到掘進工作面巖壁時,調整掘進機的空間位置;根據新的掘進機的空間位置信息,計算截割頭的坐標;根據截割頭的坐標,重新確定截割頭的運動路徑。
5 井下試驗
改造了一臺EBZ160型掘進機,使其具備智能控制功能,于2019年11月至2020年6月在山東能源新汶礦業集團翟鎮煤礦11502 W軌道巷進行了測試。
經過現場測試,基于三維模型的自適應截割技術開發的程序能夠以三維方式自動控制掘進機按照設定的行走路徑行走到巷道斷面前,根據設定的截割路徑進行截割,并根據掘進機本體的空間位置變化和掘進工作面的巖壁硬度變化自動調整截割頭的運動路徑和速度。通過測量掘進機截割后的斷面發現,左右兩幫的偏差能穩定控制在15 cm以內,頂底板的偏差能穩定控制在10 cm以內,截割深度的偏差能穩定控制在5 cm以內,滿足《煤炭井巷工程質量驗收規范》要求。
6 結論
(1)基于三維模型的自適應截割技術能夠自動控制掘進機,根據掘進機本體的空間位置變化和掘進工作面的巖壁硬度變化自動調整截割頭的運動路徑和速度,截割后的斷面滿足《煤炭井巷工程質量驗收規范》要求,為掘進機的智能控制奠定了基礎。
(2)通過檢測截割電機的電流或功率大小來判斷截割頭截割工作面巖壁的硬度與掘進工作面三維模型所確定的巖壁的硬度大小,根據截割效果實時對截割頭的速度進行修正,解決了在巷道開采過程中地質條件發生變化時的自適應調速問題,保護了截割電機和截割結構。
參考文獻
[1] 王蘇彧,杜毅博,薛光輝,等.掘進機遠程控制技術及監測系統研究與應用[J].中國煤炭,2013,39(4):63-67.
[2] 陽延軍.懸臂式掘進機遠程可視化控制系統研究[J].煤礦機械,2017,38(7):29-31.
[3] 張鎮.懸臂式掘進機機身姿態檢測及記憶自動截割控制系統研究[J].煤礦機械,2015,36(10):63-64.
[4] 李海斌.懸臂式掘進機自動截割控制系統設計[J].中國礦業,2016,25(10):150-153.
[5] 袁清國,石泉,李國鑫.掘進機截割路徑規劃方法、裝置及掘進機截割控制系統:201811401420.5[P].2019-02-26.
[6] 石泉,孫常軍,鄭洪濤,等.掘進機機器人化的關鍵技術研究[J].煤炭科學技術,2020,48(S2):199-204.