淺談南京地鐵首條全自動(dòng)駕駛車(chē)輛典型功能需求
2021-11-27 00:41:13谷圣仁
新視線·建筑與電力 2021年5期
谷圣仁

摘要:隨著城市軌道交通技術(shù)發(fā)展不斷發(fā)展進(jìn)步,全自動(dòng)駕駛技術(shù)在運(yùn)行安全、車(chē)輛旅行速度與運(yùn)行效率、運(yùn)營(yíng)組織靈活性、經(jīng)濟(jì)效益以及降低維保人員勞動(dòng)強(qiáng)度等方面體現(xiàn)出越來(lái)越明顯的優(yōu)勢(shì)。全自動(dòng)駕駛技術(shù)已發(fā)展近百年,系統(tǒng)運(yùn)行安全性已得到充足的驗(yàn)證,國(guó)外與國(guó)內(nèi)形成了一系列的全自動(dòng)駕駛標(biāo)準(zhǔn),明確了自動(dòng)化等級(jí)的劃分,并制定了自動(dòng)化運(yùn)行裝填下所對(duì)應(yīng)的安全措施以及系統(tǒng)功能需求等。
關(guān)鍵詞:南京地鐵;全自動(dòng)駕駛;車(chē)輛功能
1.全自動(dòng)駕駛發(fā)展歷程
1.1國(guó)外發(fā)展歷程
軌道交通全自動(dòng)駕駛技術(shù)可以追溯到倫敦用于郵件傳送的地鐵列車(chē)實(shí)驗(yàn),該線路于1927年開(kāi)通使用;
世界上首條全自動(dòng)載客地鐵誕生于美國(guó)紐約,該線路于1962年1月正式開(kāi)通運(yùn)營(yíng)。
1.2國(guó)內(nèi)發(fā)展歷程
全自動(dòng)駕駛的優(yōu)越性開(kāi)始得到運(yùn)營(yíng)部門(mén)的認(rèn)可,得到越來(lái)越廣泛的應(yīng)用。我國(guó)在軌道交通全自動(dòng)駕駛方面加速應(yīng)用:
2008年7月19日,北京首都機(jī)場(chǎng)線開(kāi)通運(yùn)營(yíng);
2014年8月9日,上海地鐵10號(hào)線成為國(guó)內(nèi)首條在大客流、高密度條件線路上應(yīng)用的全自動(dòng)運(yùn)行系統(tǒng);
2017年12月30日,中國(guó)首條自主研發(fā)的全自動(dòng)運(yùn)行地鐵,北京燕房線開(kāi)通運(yùn)營(yíng)。
目前,國(guó)內(nèi)多個(gè)城市都在都在進(jìn)行全自動(dòng)駕駛技術(shù)的研究應(yīng)用。
2.全自動(dòng)駕駛技術(shù)介紹
2.1全自動(dòng)駕駛技術(shù)定義
全自動(dòng)駕駛技術(shù)指的是列車(chē)的全自動(dòng)駕駛和車(chē)站設(shè)備的全自動(dòng)運(yùn)行。完全的全自動(dòng)駕駛應(yīng)包括電客車(chē)和車(chē)站設(shè)備在無(wú)人操作狀態(tài)下的全自動(dòng)運(yùn)行,實(shí)現(xiàn)行車(chē)組織自動(dòng)化、設(shè)備檢修維保智能化、乘客服務(wù)自助化。
全自動(dòng)駕駛電客車(chē)的設(shè)計(jì)目標(biāo)就是為實(shí)現(xiàn)無(wú)人駕駛狀態(tài)下的全自動(dòng)運(yùn)行。簡(jiǎn)單來(lái)說(shuō),通過(guò)采取相應(yīng)的技術(shù)設(shè)計(jì)手段,使電客車(chē)能夠具備不需要司機(jī)值守的情況下全自動(dòng)運(yùn)行的能力。
2.2列車(chē)駕駛技術(shù)等級(jí)
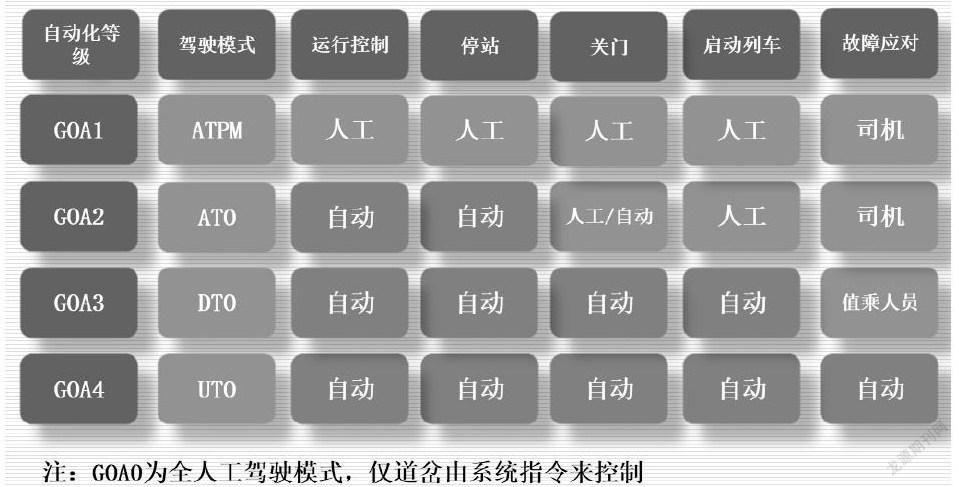
國(guó)際上針對(duì)城市軌道交通標(biāo)準(zhǔn)主要有IEC62267和IEC62290系列。標(biāo)準(zhǔn)中分別以列車(chē)運(yùn)行控制模式進(jìn)行分類,主要包括人工方式運(yùn)行列車(chē)、非自動(dòng)方式運(yùn)行列車(chē)、半自動(dòng)方式運(yùn)行列車(chē)、無(wú)需駕駛的方式運(yùn)行列車(chē)以及列車(chē)完全自主運(yùn)行,對(duì)應(yīng)自動(dòng)化等級(jí)分別為GOA0、GOA1、GOA2、GOA3 和GOA4。其中GOA2、GOA3、GOA4 定義為自動(dòng)運(yùn)行模式。
列車(chē)不同駕駛模式下的功能界限見(jiàn)下圖:
GOA2相當(dāng)于ATO模式,只有發(fā)車(chē)和開(kāi)關(guān)門(mén)需要司機(jī)操作。GOA3又稱之為DTO(Driverless train operation),即為有人值守的全自動(dòng)駕駛,列車(chē)啟停、車(chē)門(mén)開(kāi)關(guān)全部由系統(tǒng)自動(dòng)完成,但是車(chē)上必須有一位乘務(wù)員以應(yīng)對(duì)突發(fā)事件。GOA4又稱之為UTO(Unattended train operation),即為無(wú)人全自動(dòng)駕駛,GOA4為最高等級(jí)的全自動(dòng)駕駛,列車(chē)運(yùn)行完全由系統(tǒng)自動(dòng)實(shí)現(xiàn),列車(chē)上沒(méi)有司機(jī)或乘務(wù)員。
GOA3與GOA4等級(jí)下列車(chē)均為自動(dòng)化運(yùn)行,運(yùn)行控制、開(kāi)關(guān)門(mén)、啟停列車(chē)自動(dòng)實(shí)現(xiàn),兩者關(guān)鍵區(qū)別在于是否有值乘人員,在故障應(yīng)對(duì)處置程度上有所區(qū)別。GOA3等級(jí)下的自動(dòng)駕駛系統(tǒng),值乘人員在列車(chē)運(yùn)行過(guò)程中,列車(chē)休眠喚醒、客室狀態(tài)監(jiān)控、線路狀態(tài)監(jiān)控、車(chē)輛運(yùn)行狀態(tài)監(jiān)控、列車(chē)故障狀況下應(yīng)急處置等功能可以由值乘人員及時(shí)介入,因此設(shè)備系統(tǒng)的配置、功能及性能要求相對(duì)GOA4等級(jí)要低一些。而對(duì)于G0A4等級(jí)下的全自動(dòng)駕駛系統(tǒng),上述功能全部由系統(tǒng)通過(guò)軟硬件來(lái)實(shí)現(xiàn),對(duì)設(shè)備系統(tǒng)的功能與性能要求則更高。
2.3全自動(dòng)駕駛技術(shù)優(yōu)勢(shì)
運(yùn)行安全提升,全自動(dòng)駕駛各系統(tǒng)經(jīng)過(guò)更為嚴(yán)格的安全認(rèn)證,各設(shè)備系統(tǒng)具備更高的可靠性和更加充分的冗余度;同時(shí),設(shè)備系統(tǒng)自動(dòng)化運(yùn)行,大大降低人為誤操作的可能性,提升運(yùn)行安全性和可靠性。
運(yùn)行效率更高,全自動(dòng)駕駛技術(shù)實(shí)現(xiàn)列車(chē)自主化運(yùn)行,不在像傳統(tǒng)系統(tǒng)運(yùn)作模式,需要人工或者通過(guò)調(diào)試系統(tǒng)來(lái)安排運(yùn)行調(diào)整,同時(shí)受司機(jī)配置以及出勤地點(diǎn)影響。可依據(jù)線路實(shí)際運(yùn)用需求,及時(shí)調(diào)整運(yùn)能,靈活配置上線列車(chē)數(shù)量、調(diào)整列車(chē)運(yùn)行時(shí)間間隔,提升線路在面對(duì)突發(fā)故障、大客流等狀況下的處置效率以及應(yīng)對(duì)能力。
能源利用更合理,全自動(dòng)運(yùn)行車(chē)輛能夠更有利于進(jìn)行區(qū)間列車(chē)調(diào)整,根據(jù)能源利用算法優(yōu)化,進(jìn)行相應(yīng)的運(yùn)行調(diào)整,充分利用區(qū)間內(nèi)列車(chē)惰行、牽引和制動(dòng)的工況,從而達(dá)到節(jié)能的效果。
旅行速度更快,全自動(dòng)駕駛工況下,列車(chē)可以實(shí)現(xiàn)自動(dòng)開(kāi)關(guān)門(mén)、自動(dòng)折返、故障自動(dòng)復(fù)位等相關(guān)功能,使得列車(chē)旅行速度更快。
經(jīng)濟(jì)效益更可觀,全自動(dòng)駕駛技術(shù)在實(shí)現(xiàn)更高的運(yùn)行效率和更快的旅行速度后,在同等行車(chē)間隔的條件下,可降低列車(chē)配屬數(shù)量,減少購(gòu)車(chē)成本;列車(chē)自主化運(yùn)行,可以減少司機(jī)配員,降低人力成本;能源利用更加合理,減少電力使用。
3.全自動(dòng)駕駛等級(jí)下車(chē)輛典型需求
3.1全自動(dòng)駕駛等級(jí)下車(chē)輛基本運(yùn)行流程
全自動(dòng)駕駛等級(jí)下,車(chē)輛應(yīng)能夠?qū)崿F(xiàn)自主化運(yùn)行,包括列車(chē)自動(dòng)喚醒休眠,綜合自檢,自動(dòng)出入庫(kù),自動(dòng)開(kāi)關(guān)門(mén),自動(dòng)啟停列車(chē),自動(dòng)洗車(chē)等相關(guān)流程。
全自動(dòng)駕駛車(chē)輛運(yùn)行流程見(jiàn)下圖:
3.2全自動(dòng)駕駛車(chē)輛典型功能
全自動(dòng)駕駛條件下,車(chē)輛典型功能主要為解決或彌補(bǔ)由于前端司機(jī)室或列車(chē)上沒(méi)有乘務(wù)人員的空白。主要包括運(yùn)行保護(hù)、列車(chē)駕駛、線路監(jiān)控、乘客服務(wù)、列車(chē)管理、緊急處置等方面的內(nèi)容,其中列車(chē)自動(dòng)保護(hù)和列車(chē)自動(dòng)運(yùn)行,目前常規(guī) GoA2自動(dòng)化等級(jí)線路中已經(jīng)實(shí)現(xiàn)。
本文將重點(diǎn)介紹全自動(dòng)駕駛車(chē)輛在線路監(jiān)控、乘客服務(wù)、列車(chē)管理、緊急處置方面的典型功能。
線路監(jiān)控主要監(jiān)控列車(chē)運(yùn)行限界內(nèi)設(shè)備狀況,包括是否有異物侵限,弓網(wǎng)接觸狀況等。目前主要有走行部在線檢測(cè)、障礙物探測(cè)與脫軌檢測(cè)、弓網(wǎng)在線檢測(cè)等線路檢測(cè)手段。
乘客服務(wù)主要在沒(méi)有乘務(wù)人員的前提下,提供包括乘客上下車(chē)、語(yǔ)音播報(bào)等相關(guān)服務(wù),主要有車(chē)門(mén)對(duì)位隔離、乘客信息播報(bào)、乘客緊急求助等功能。
列車(chē)管理是指車(chē)輛具備從喚醒至運(yùn)營(yíng)回庫(kù)自動(dòng)化運(yùn)行功能,主要有列車(chē)自動(dòng)喚醒與休眠、自檢、自動(dòng)洗車(chē)等功能。
緊急處置是在具備正常功能的同時(shí),具有故障預(yù)警、故障復(fù)位、應(yīng)急處置等功能,確保車(chē)輛運(yùn)營(yíng)安全。主要包括火災(zāi)報(bào)警、列車(chē)故障遠(yuǎn)程干預(yù)、列車(chē)停車(chē)控制、故障遠(yuǎn)程告警等功能。