VR技術下廣場綠化景觀格局數據關鍵幀解析
2021-11-17 03:58:58吳一非
計算機仿真 2021年3期
關鍵詞:景觀
吳一非,吳 江
(1.江西科技學院,江西 南昌 330000;2.南昌大學,江西 南昌 330000)
1 引言
虛擬現實技術(Virtual Reality,VR[1])也叫靈境技術,是近幾年新興的一種創新型實用技術,廣泛應用于各種領域。廣場作為人與人之間的主要交流公共場所之一,也具有一定的自然、文化、生態等地域象征,而構建的綠化景觀格局則可以展現出地域象征的重要文化精神。憑借虛擬現實技術具有的交互性、沉浸感、多感知性以及想象力等優勢,與綠化景觀格局構建有效結合,優化格局設計,強化景觀表現力,實現身臨其境的體驗感,節省展示與溝通成本,不論是在綠化景觀格局的設計階段還是施工階段,虛擬現實技術都具有重要的現實意義。
虛擬現實技術中的關鍵幀解析階段,主要是為決策者做趨勢預測提供影像變化過程,而關鍵幀提取則是解析階段中的核心部分。用來反映影像中重要事件的圖像幀即為關鍵幀,即一個關鍵幀要具備展現該影像中主要內容的能力,關鍵幀是一幀或者若干幀圖像,因為VR影像數據量較大,故用關鍵幀替代影像進行儲存與檢索,該關鍵幀既要便于儲存、索引以及檢索等后續處理,還要保證數據量小,方便計算,實現數據壓縮與檢索速率提升。由于各影像構建背景相同,相同影像內各幀圖像會存在大量重復信息,因此,關鍵幀在提升瀏覽與檢索便捷性方面起著重要的作用。相關學者對此進行了研究,陳雁等[2]針對視頻信息的處理,主要是將視頻從長視頻縮短成為包含信息的短視頻,再在這些包含信息的短視頻當中篩選出關鍵幀,對這些信息的篩選和處理從而能夠得到有用的關鍵幀就是視頻數據分析的關鍵,關鍵幀技術能夠極大地節約信息處理資源,減小了信息數據量。康艷榮等[3]通過二進制碼分析比對正常和超大波粒視頻數據文件結構,解析兩類波粒視頻數據之間位圖索引,關鍵幀等數據結構的差異,建立波粒超大視頻數據解析算法,實現了波粒超大視頻關鍵幀的準確分析。但是傳統方法可操作性較差,在此基礎上,以VR為技術背景,提出一種廣場綠化景觀格局數據關鍵幀解析方法。根據變化率情況,采用對應閾值檢測關鍵幀,避免關鍵幀檢測閾值過于單一;通過計算極大后驗概率原則下最優解問題,提升分割精準度;利用斑塊密度、平均形狀指數、邊緣密度、優勢度指數、多樣性指數以及距離指數等指標,增加格局數據關鍵幀解析的直觀性。
2 廣場綠化景觀格局VR影像關鍵幀閾值選取
VR影像用累積直方圖表示,影像內容變化用累積直方圖距離度量,影像的累積直方圖界定公式如下所示

(1)
式中,影像特征取值為k,可取值的特征數量是i,特征取值總數量是l,特征值是k的影像像素數量為nk,像素總個數為N。
用下列公式描述影像第X幀與第Y幀的累積直方圖距離

(2)
影像內容的差異度用變化率CR衡量,界定條件式如下所示
(3)
式中,影像相鄰幀差為FDsum,影像相鄰幀的平均差值為FDmean,所有影像相鄰幀差的方差是Tsum,所有影像相鄰幀的平均差值方差是Tmean。其中,相鄰幀差FDsum與平均幀差FDmean的界定公式分別如下所示
FDsum=sum(DC1,DC2,…,DCn)
(4)
FDmean=mean(DC1,DC2,…,DCn)

(5)
式中,影像中相鄰幀差的個數為n。
如果影像的相鄰幀差均值與相鄰幀差比對應閾值小,則影像內容差異度小,變化率取值-1;如果影像的相鄰幀差均值與相鄰幀差比對應閾值大,則影像內容差異程度大,變化率取值1;若屬于其它情況,則影像內容差異程度中等,變化率取值0。
關鍵幀閾值可通過下列公式確定
Th=m+sσ
(6)
上式里,影像相鄰幀差的方差與均值分別為σ與m,加權系數是s,系數取值根據影像內容變化率決定,當變化率較大時,通過高閾值Thh檢測關鍵幀,若變化率較小,利用低閾值Thl檢測關鍵幀,這樣可以防止關鍵幀檢測閾值過于單一。
依據影像內容變化程度CR,選取關鍵幀的流程描述如下:
1)假設影像幀集合為Syxz={F1,F2,…,Fmid,…,Fi,…,Fn},其中,關鍵幀集合Sgjz中有M個元素,初始化是空集狀態;
2)變化程度CR取值-1,影像關鍵幀為中間幀Fmid,且Sgjz=Sgjz∪Fmid,M=M+1;
3)變化程度CR取值1,當前幀是Fc,后續幀是Fs,DC(Fc,Fs)表示兩幀之間的距離,高閾值Thh=m+shσ,假設Fc=F1,那么,Sgjz=Sgjz∪F1,M=M+1,求解兩幀間距時,如果累積直方圖間距DC(Fc,Fs)大于高閾值Thh,則Sgjz=Sgjz∪Fs,Fc=Fs,M=M+1,如果DC(Fc,Fs)比高閾值Thh小,則Fc=Fs,直到解得Fc=Fn計算結束,VR影像關鍵幀提取完成;
4)變化程度CR取值0,閾值為低閾值Thl=m+slσ,提取關鍵幀;
5)所有影像關鍵幀提取完畢,組建關鍵幀集合Sgjz,得到影像序列。
3 廣場綠化景觀格局關鍵幀影像特征提取
3.1 關鍵幀影像分割
假設尺寸是L×W的影像像素點集合是Sxsd={s=(i′,j′)},且1≤i′≤L,1≤j′≤W,影像強度矩陣設定為H={Hs;s∈Sxsd},經過分割的影像種類標簽是R={rs,rs∈{1,2,…,p}},影像分割種類個數是p;若分割后第i類指數分布參數是δi,那么,通過下列計算公式求取影像概率密度函數[4]

(7)
依據貝葉斯原理[5],架構下列影像分割后驗概率函數表達式
(8)
基于上式將影像像素點幅度值用Hs表示,通過計算極大后驗概率原則[6]下最優解問題,完成影像分割,求解最優解問題的公式如下所示

(9)


(10)

(11)
3.2 VR影像特征提取
為確保影像信號在0到1之間進行取值,歸一化處理分割后的關鍵幀影像,通過像素差值同化所有影像信號規格,影像信號Z的歸一化處理公式如下所示
(12)
假設歸一化處理過的影像信號Z尺度信息是J,方向信息是K,經過兩信息的Contourlet變換,獲取影像低、高頻系數,分別表示為bAj″(t)與bDj″,i″(t),其中,j″=1,2,…,2-J,i″=1,2,…,2-K,下列公式分別為相關約束條件式
(13)
影像歸一化處理信號Z的低、高頻率與高、低尺度信息均包含于上列約束條件式中。
利用模糊邏輯方法[9],模糊性濾除歸一化處理后的影像,融合Contourlet變換與模糊邏輯[10],設定特征提取輸入語言變量為語義變量LA、LD,則語義變量LA、LD的集合表達式如下所示
(14)
式中,集合ψA與ψD中所含變量個數分別是τA與τD,采用下列計算公式求解與集合ψA、ψD相對應的影像隸屬度函數[11]
μψA[bAj″(t)]

(15)
式中,對應于影像信號語義變量LA與LD的第γ個與第λ個隸屬度函數,分別用μVAγ(γ=1,2,…,τA)與μVDλ(λ=1,2,…,τD)表示。
由上列各式推導出影像信號語言變量與對應隸屬度函數的相關性,關系表達式如下所示
GA[bAj″(t)]=ψA?μψA[bAj″(t)]
(16)


(17)
利用激活強度計算公式求取所有模糊區域的激活強度值后,通過下列加權融合計算公式,得到關鍵幀影像特征矢量ω,完成關鍵幀影像特征提取
(18)
4 實驗分析
4.1 實驗參數
綠化景觀格局與生態學相關,因此,基于生態學理念,設定綠化景觀格局解析指標,利用斑塊密度、平均形狀指數、優勢度指數等指標,更直觀地解析格局數據關鍵幀。為優化后續綠化景觀格局整體規劃,通過分析景觀格局的服務價值,得到綠化生態系統服務總價值。
1)斑塊密度
利用斑塊密度PD反映綠化景觀組合空間的破碎化程度,表達式如下所示
(19)
式中,廣場綠化景觀所含斑塊總數是N,廣場綠化景觀空間面積總和為A,綠化景觀中所有斑塊邊界總長度是E,綠化物種組成與邊緣效應決定邊緣密度。
2)平均形狀指數
平均形狀指數MSI計算公式如下所示
(20)
式中,斑塊周長為pij,斑塊面積為aij。該指標取值范圍不小于1,若平均形狀指數取值1,則綠化景觀空間的斑塊形狀是方形,隨著指數值不斷增加,斑塊形狀慢慢與正方形發生偏離。
3)優勢度指數
優勢度指數DI的計算公式如下所示:
DI=SDImax+∑pilgpi
(21)
式中,多樣性指數極大值是SIDmax綠化景觀各類別斑塊與總面積的占比為pi,若該指標取值0,則綠化景觀只有一種斑塊,斑塊種類隨著指數值的增加而增多。
3)服務總價值
綠化景觀空間格局生態系統服務總價值V的表達式,如下所示

(22)
式中,價值系數用u、v表示,第i類綠化景觀分布面積是Aj,廣場中該綠化景觀格局的生態功能單價是qij。
4.2 實驗數據分析
利用VR技術構建一個總面積為2500平方米的廣場綠化景觀影像序列,從中提取的關鍵幀如圖1所示。

圖1 廣場綠化景觀關鍵幀示意圖
根據關鍵幀示意圖,分析計算得出表1所示的廣場綠化景觀指數值。
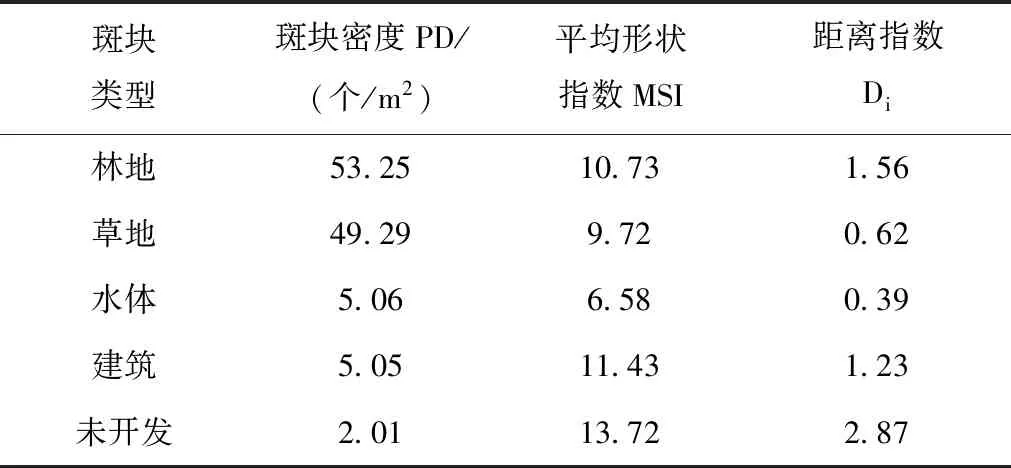
表1 廣場綠化景觀指數值統計表
通過表1中數據可以看出,從關鍵幀中共提取出五種斑塊類型,全面展現出綠化景觀影像中的主要信息,并對該關鍵幀做出如下解析:根據各類斑塊的密度指數可知,在廣場綠化景觀格局中,林地與草地所占面積較大,滿足廣場綠化與生態需求;水體與建筑斑塊密度較小,說明為方便人類活動,構建了較多的運動空地,符合廣場用途目的;少許未開發區域的保留,則是為實際建設時有可能會遇到的突發狀況做應急準備。
在此基礎上,以服務總價值為參數,對比文獻[2]方法和文獻[3]方法,對比結果如圖2所示。
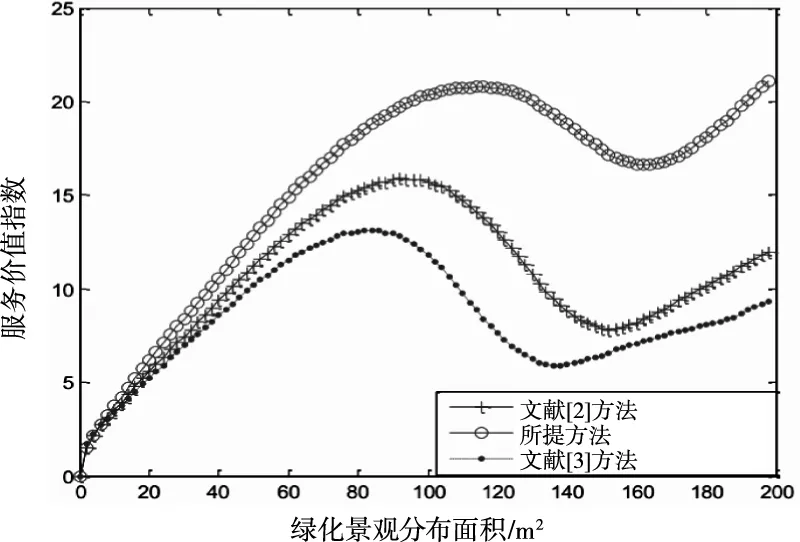
圖2 不同方法系統服務價值對比圖
如圖2所示,所提方法的綠化景觀空間格局生態系統服務總價值明顯高于傳統方法,說明所提方法具有較高的實際應用性。
5 結論
VR技術對社會生活的不斷滲透,將VR技術與廣場綠化景觀格局設計結合,架構一種景觀格局數據關鍵幀解析方法。為使該方法具有更好的發展前景與更廣闊的應用空間,仍需要進行大量的研究工作:關鍵幀邊界檢測是影像分析、檢索的首要環節與基礎,根據壓縮域屬性,提出一種關鍵幀檢測算法,具有實際研究價值;在特征提取階段,基于景觀格局領域與相關知識,聯立低層特征與高層語義之間的關系;只針對數據關鍵幀的視覺特征加以解析,完整度略顯不足,應融入音頻特征與文本信息,使關鍵幀解析更加精準;綠化景觀格局類型多種多樣,應依據不同的場景特點與設計理念,創建一個具有通用性能的基本解析框架。
猜你喜歡
現代裝飾(2021年6期)2021-12-31 05:27:54
建材發展導向(2021年14期)2021-08-23 00:56:40
小學科學(學生版)(2020年12期)2021-01-08 09:28:10
小學科學(學生版)(2020年7期)2020-07-28 08:00:52
食品工業(2020年6期)2020-07-18 04:07:20
少年漫畫(藝術創想)(2020年12期)2020-06-09 05:50:08
創新作文(小學版)(2017年31期)2017-04-09 06:13:24
視聽(2016年2期)2016-08-21 07:50:50
照明工程學報(2016年3期)2016-06-01 12:17:56
中國攝影家(2014年6期)2014-04-29 14:54:47
