面掃描模式下的渦流熱成像缺陷重構方法研究*
2021-11-16 10:51:06李建宇張來斌鄭文培
石油機械 2021年11期
李建宇 張來斌 鄭文培
(1.中國石油大學(北京)機械與儲運工程學院 2.中國石油大學(北京)安全與海洋工程學院)
0 引 言
隨著油氣開發重心逐漸向海洋轉移,海上鉆井平臺的數量在不斷攀升,其重要性也快速提升。與此同時,海洋平臺的服役風險也日益突出,早期的平臺逐漸到達壽命高風險期,世界范圍內已經發生了多起海洋平臺事故,造成了巨大的經濟損失和人員傷亡。例如英國北海的“海上鉆石”號平臺沉沒事故,主要原因是平臺支柱桿發生脆斷[1];“亞歷山大基爾蘭”號海洋平臺發生倒塌,造成重大人員與經濟損失,事故主要原因是平臺撐管基座的焊接連接處,由于長期的海洋環境載荷作用所產生的疲勞裂紋損傷擴展延伸,最終導致疲勞斷裂[2];印度的“孟買BHN”號鉆井平臺發生立柱失效事故,其主要原因也是結構疲勞引發的問題[3];俄羅斯的“科拉”號平臺在暴風雪影響下產生疲勞裂紋,最終導致平臺失效[4]。這些工程教訓引起了全世界各國對海上平臺疲勞損傷問題的重視[5]。因此,有效檢測結構損傷,評定結構的安全性和可靠性,對保證裝備安全服役、最大限度地避免事故發生具有重要意義。
紅外熱成像檢測具有檢測快速、單次檢測面積大、非接觸、無污染以及成像直觀等特點,已經被應用到缺陷檢測、失效分析和健康監測等領域。近10年來,渦流激勵紅外熱成像技術被建立和發展,吸引了全世界的科研人員對其進行研究,并被應用到航天航空、海洋結構、電力系統和鐵路等不同領域,對不同缺陷的檢測都發揮了重要作用。YUAN B.Y.等[6]利用渦流熱成像對液壓系統堆焊構件進行檢測,通過分析經過離散傅立葉變換后的紅外熱圖序列,實現對缺陷的檢測識別。MARTINA等通過研究不同區域存在不同的冷卻速率,判別缺陷的存在,同時提出一種等高線算法對缺陷進行描述,對缺陷形狀進行區分。陳怡帆[7]利用渦流熱成像技術檢測缺陷,提出一種獨立成分分析算法對檢測結果進行重構,增強了缺陷的特征[8]。從當前國內外研究現狀來看,關于利用渦流熱成像技術對缺陷進行檢測,越來越多的學者將研究重點放在缺陷的識別與定量檢測方面。
結合紅外熱成像的特點及優勢,本文提出一種面掃描的動態檢測模式,在保證采集數據過程快速及完整的前提下,提取特定時間點熱圖信息,對缺陷進行重構處理。該方法可以準確地描述缺陷輪廓,同時對缺陷進行定量檢測。
1 方法研究
通過對渦流熱成像的加熱過程進行研究,建立了數學物理時間分割模型,該模型可以將渦流熱成像劃分為4個不同的物理階段[9-11],各階段溫度變化如圖1所示。
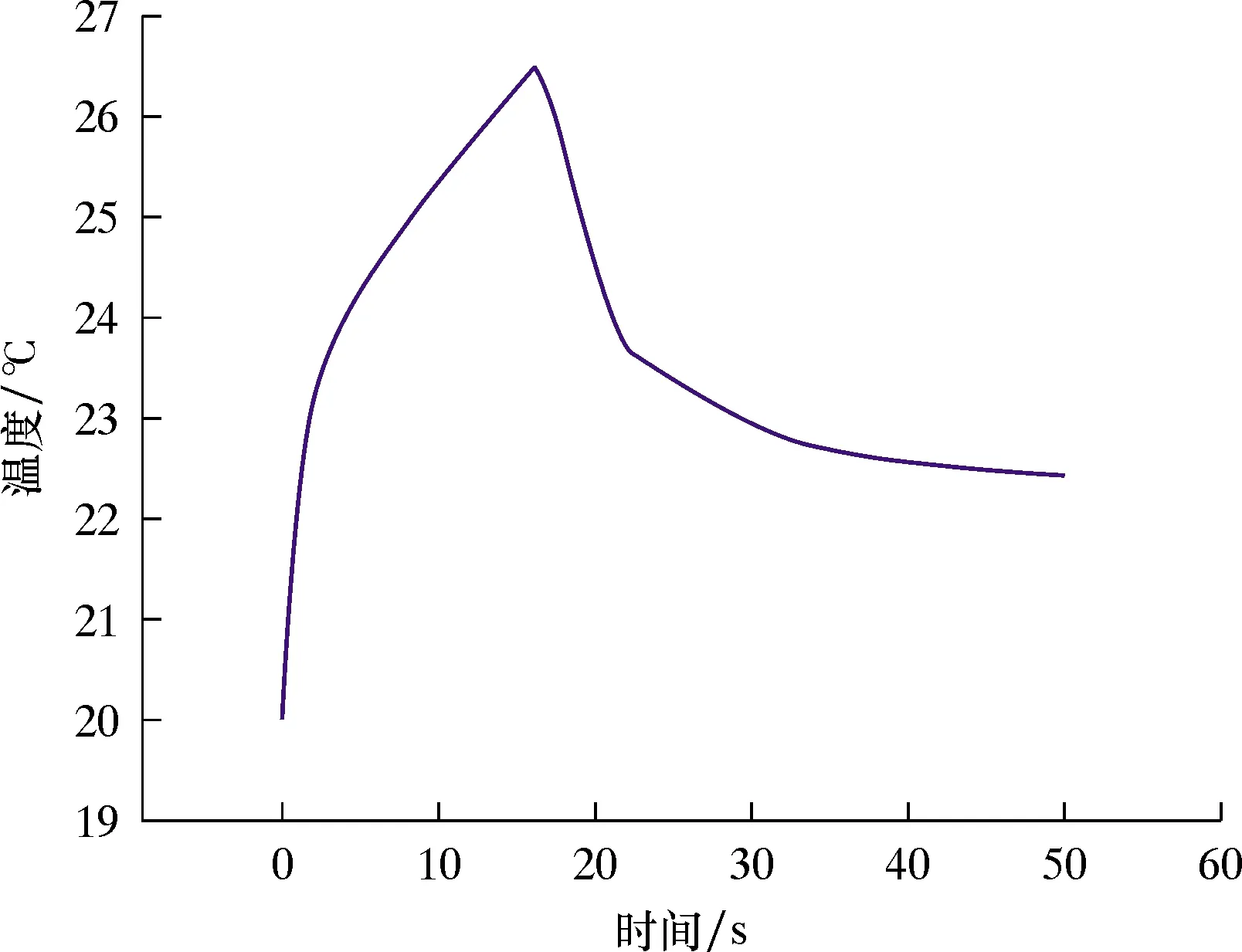
圖1 導體在感應加熱過程中的溫度變化Fig.1 Temperature change of conductor during induction heating
第一階段(P1):對被檢測對象的目標區域進行加熱,導體表面或近表面受到脈沖信號激勵而感應出電渦流,渦流密度以極快的速度上升,產生的焦耳熱隨之快速增加。由于第一階段的時間很短,熱擴散還未對表面溫度分布產生較大影響。第二階段(P2):隨著加熱的延續,在導體近表面的三維熱擴散逐漸發揮作用。由于加熱時間延長,表面溫度快速升高,加熱區域與非加熱區域的溫度差變得愈發明顯,導致熱擴散現象加劇。目標區域的溫度同時受到感應加熱與熱擴散兩種效應的影響變得復雜。第三階段(P3):加熱過程進入設定的最終時間,基本與第一階段為相反的過程。由于激勵信號終止,導體表面的渦流分布也隨之快速消失,渦流密度由最大值快速變為0。而熱擴散效應具有一定的延續性及滯后性,且處于影響最大的階段,變化率達到最大。但由于該階段的時間非常短,溫度變化很小。第四階段(P4):被測導體進入冷卻階段,只有熱擴散效應的影響,溫度開始快速降低,熱擴散的影響隨之減小,反過來又延緩溫度降低的速率。最終,導體溫度趨于周圍環境溫度。
P1及P3缺陷附近溫度分布仿真圖如圖2所示。通過以上階段劃分可以看出:第一階段,由于熱擴散程度較弱,捕獲的信息可以比較清楚地反映試件表面缺陷的輪廓信息;第三階段,外部加熱結束,信號達到峰值,缺陷部位與正常部位的差別達到最大。但由于熱擴散作用的影響,已經難以識別缺陷輪廓。因此將兩個階段的數據結合在一起,分別表征缺陷的輪廓以及深度,并利用算法對其進行優化。

圖2 P1及P3缺陷附近溫度分布仿真圖Fig.2 Temperature distribution by simulation near the defect in Phase 1 and 3
由于在動態檢測模式下,被測對象與感應線圈/熱像儀有相對位移,所以缺陷在不同時間的溫度信號圖中的位置也在變化。將熱圖序列有序排列如圖3所示,建立溫度信號關于時間-位置的三維模型,可以獲得目標點/區域的溫度變化信息,由此提取特定時間的溫度信號用來進行缺陷的輪廓表征與深度測量。
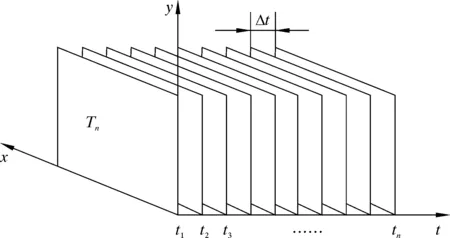
圖3 熱像儀拍攝熱圖序列Fig.3 Heat imaging sequence
經過推導可得目標點的坐標隨時間(熱圖序列)的變化規律:
Gn=G1×f(v,tn,f)
式中:Gn為第n張熱圖中目標點的坐標,G1為初始熱圖中目標點的坐標,初始熱圖為首次檢出缺陷的熱圖,v為被測對象位移速度,tn為熱圖的序列號,f為熱像儀的采樣頻率。
對兩個階段的溫度分布圖像分別進行處理,利用第一階段圖像確定缺陷輪廓區域,利用第三階段溫度信息對缺陷深度進行研究。通過計算機仿真獲得深度-溫度數據,結合試驗測量得到深度與溫度關系數據,再利用深度學習算法,獲得缺陷深度與溫度的非線性關系,從而為后續缺陷深度的準確測量提供數據基礎。
2 試驗裝置
檢測系統主要由激勵系統(包括信號發生器、激勵線圈和水冷系統等)、待測工件、導軌、熱像儀及電腦等組成,試驗臺及其原理如圖4所示。

圖4 試驗臺及其原理圖Fig.4 Test device and schematic diagram
試驗時,將待測工件放置在平移臺的導軌上,使其勻速移動,其他設備保持不變。導軌速度調整為2 mm/s,對激勵線圈通入30 A、150 kHz的交變電流,將熱像儀的采樣頻率設定為30 Hz,將采集到的熱圖序列傳入電腦中進行處理[12-14]。
采用標準半橢圓形缺陷以模擬金屬板常見的裂紋缺陷,具體形狀如圖5所示。對多組不同長度、深度以及寬度的缺陷進行試驗,具體尺寸如表1所示。
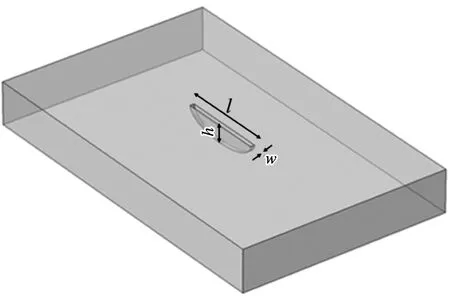
圖5 缺陷形狀Fig.5 Shape of the defect

表1 缺陷尺寸 mm
3 試驗結果及分析
試驗開始時,先將檢測系統的激勵系統打開,感應線圈產生的勻強磁場在金屬板上激勵出電渦流,依靠電渦流的能量加熱金屬板件;然后打開熱像儀及平移臺,待測工件在導軌的托持下勻速運動,經過激勵線圈及熱像儀拍攝區域;之后分析熱像儀所采集到的熱圖序列,可以實現對缺陷的定量檢測。

圖6 剛加熱時的溫度信號Fig.6 Temperature signal in phase 1
圖6a為缺陷剛進入加熱區域時,熱像儀拍攝到的熱圖像,即P1處的溫度信號。
從圖6可以看出,只有在缺陷兩段有較為明顯的溫度升高,符合前文的分析結果。記錄此刻缺陷相對位置坐標(m1,n1),此時平移臺仍然保持勻速運轉,通過對試驗臺進行測量,激勵線圈的加熱范圍為其正下方直徑約40 mm的圓形范圍,結合平移臺移動速度2 mm/s,以及熱像儀采樣頻率30 Hz,選擇熱圖序列在第600幀附近,這樣可以較準確地得到加熱過程結束前缺陷附近(P3處)的溫度信號。加熱過程到達P3的溫度信號如圖7所示。

圖7 加熱過程到達P3的溫度信號Fig.7 Temperature signal in phase 3
由于采用半橢圓形缺陷試樣,采集到的溫度信號兩端高溫、中間溫度升高相對較慢(見圖6b),所以在熱圖像中可以觀察到明顯的兩個峰值,同時也驗證了P1可以清楚地顯示出缺陷的位置及輪廓信息。
對于P3的溫度信號,由平移臺移速及加熱時間(熱圖序列的幀數)可知,圖中缺陷的位置為(m600,n600),測量此處溫度最高值。將P1與P3的溫度信號相結合,可得到較為準確的缺陷輪廓信息與最高溫度信息,如圖8所示。

圖8 缺陷輪廓及深度對應溫度Fig.8 Temperatures corresponding to the defect contour and depth
獲得缺陷的位置以及深度預測信息后,利用神經網絡對缺陷進行重構,再將結果與缺陷的真實尺寸進行對比,這樣可以反映出該重構方法的實際效果。
圖9~圖11為重構缺陷尺寸與實際尺寸對比情況。由圖9~圖11可以看出,在確定其他兩個尺寸后,將重構后得到的尺寸與缺陷實際尺寸進行對比,可以驗證該重構方法的實際效果。

圖9 重構缺陷長度與實際長度對比Fig.9 Comparison of reconstructed length and real length of the defect
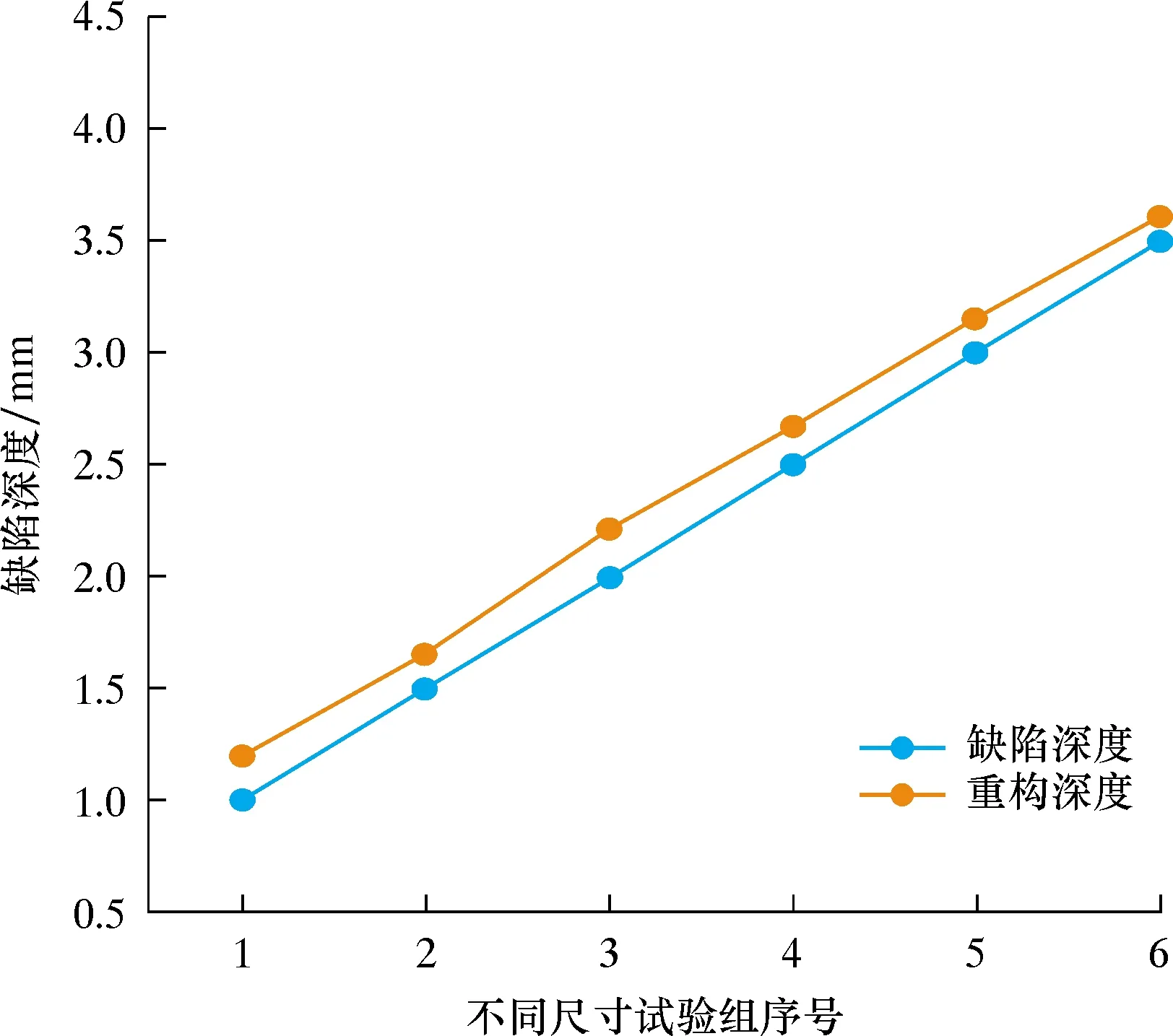
圖10 重構缺陷深度與實際深度對比Fig.10 Comparison of reconstructed depth and real depth of the defect

圖11 重構缺陷寬度與實際寬度對比Fig.11 Comparison of reconstructed width and real width of the defect
4 結 論
(1)基于渦流熱成像檢測原理,利用紅外熱像儀所具有的區域溫度采集功能的優點,提出了一種基于面掃描的動態監測模式,采用該模式可以有效地提取缺陷的輪廓信息與深度信息,為后續缺陷的定量分析提供了更為準確的數據儲備。
(2)在獲得缺陷的位置以及深度預測信息之后,利用神經網絡對缺陷進行重構,再將結果與缺陷的真實尺寸進行對比,可以反映出該重構方法的實際效果。
(3)通過試驗結果可以看出,基于面掃描的重構方法對缺陷長度以及深度的重構效果較好,對缺陷寬度的檢測效果不佳,這是因為缺陷寬度較小,試件表面熱傳導效應對檢測結果的影響較大。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
電子制作(2018年11期)2018-08-04 03:25:42
