液壓自動(dòng)抓梁模塊化設(shè)計(jì)的研究及應(yīng)用
2021-11-16 11:18:02曾文,范如谷,趙明,譚曉波,代新啟
四川水力發(fā)電 2021年5期
關(guān)鍵詞:模塊化設(shè)計(jì)
曾 文, 范 如 谷, 趙 明, 譚 曉 波, 代 新 啟
(中國(guó)水利水電夾江水工機(jī)械有限公司,四川 樂(lè)山 614100)
1 概 述
液壓自動(dòng)抓梁是水電站進(jìn)行閘門(mén)啟閉操作的關(guān)鍵設(shè)備之一。該類(lèi)抓梁能較好地實(shí)現(xiàn)水下自動(dòng)穿退銷(xiāo)和防意外退銷(xiāo)功能,具有方便與閘門(mén)接口、適應(yīng)不斷增加的大啟閉容量要求等諸多優(yōu)點(diǎn),在我國(guó)大、中型水利水電工程中應(yīng)用廣泛,特別是隨著高壩、大壩建設(shè)的日益增多,還面臨著適應(yīng)超過(guò)100 m水深和多泥沙水體等特殊環(huán)境使用的要求。
目前,液壓自動(dòng)抓梁的設(shè)計(jì)普遍是針對(duì)每一項(xiàng)工程的具體要求,且以經(jīng)驗(yàn)設(shè)計(jì)為主,其設(shè)計(jì)周期較長(zhǎng)、效率低、成本較高,進(jìn)而影響到產(chǎn)品的可靠性和質(zhì)量穩(wěn)定性,而模塊化設(shè)計(jì)方法能在制造成本、設(shè)計(jì)周期、快速響應(yīng)以及便于提高可靠性等方面滿足用戶的需求,提高了產(chǎn)品設(shè)計(jì)的自動(dòng)化程度和競(jìng)爭(zhēng)力。
針對(duì)液壓自動(dòng)抓梁的使用與工作條件、功能、組成、結(jié)構(gòu)及接口關(guān)系,研究了各部件的作用和關(guān)系,確定了各零部件模塊化設(shè)計(jì)的基本思路,提出了液壓自動(dòng)抓梁模塊化設(shè)計(jì)方案,并針對(duì)三維模塊化快速設(shè)計(jì)進(jìn)行了一些探討。
2 模塊化設(shè)計(jì)的原則和思路
2.1 模塊劃分原則
模塊劃分過(guò)程中,應(yīng)充分考慮客戶需求、設(shè)計(jì)特征、功能結(jié)構(gòu)、裝配、成本和維修等綜合因素,應(yīng)遵循以下相關(guān)基本原則[1]:
(1)結(jié)構(gòu)完整性和系統(tǒng)性。模塊化[2]是從系統(tǒng)優(yōu)化的角度將產(chǎn)品的總體功能要求按照模塊應(yīng)具有的基本功能特征、結(jié)構(gòu)特征以及模塊劃分原則,將產(chǎn)品合理劃分成多個(gè)模塊的過(guò)程。在模塊劃分過(guò)程中,首先對(duì)產(chǎn)品的總功能進(jìn)行充分的分解,得到一系列基本功能單元,形成系統(tǒng)的科學(xué)與應(yīng)用相結(jié)合的模塊分類(lèi)方法。
(2)功能獨(dú)立性及可擴(kuò)充性原則。模塊劃分對(duì)分類(lèi)子系統(tǒng)的擴(kuò)展、對(duì)模塊類(lèi)別的開(kāi)拓要有良好的適應(yīng)性,模塊內(nèi)部要有強(qiáng)關(guān)聯(lián)性,模塊與模塊之間為弱關(guān)聯(lián)性,而不致于產(chǎn)生不良效果。在實(shí)際應(yīng)用中,對(duì)識(shí)別模塊劃分、選擇模塊需要簡(jiǎn)明、準(zhǔn)確。
(3)模塊劃分?jǐn)?shù)量合理。應(yīng)重點(diǎn)解決好模塊劃分的總體功能分解方案及分解程度、功能單元程度的衡量及按模塊化設(shè)計(jì)的價(jià)值與效益確定模塊劃分的數(shù)目。
(4)相關(guān)性。模塊劃分層次的有序程度是保障模塊相關(guān)性的重要條件,模塊劃分層次的設(shè)計(jì)對(duì)于體現(xiàn)其科學(xué)與實(shí)用性具有至關(guān)重要的作用。
2.2 液壓自動(dòng)抓梁設(shè)計(jì)的思路
在液壓自動(dòng)抓梁設(shè)計(jì)過(guò)程中,需要滿足模塊化和參數(shù)化快速設(shè)計(jì)建模的要求,最終采用了“自頂向下[3]”的設(shè)計(jì)方法, 即設(shè)計(jì)思路是從“總體設(shè)計(jì)”到“模塊設(shè)計(jì)”。
(1)總體設(shè)計(jì)模塊化搭建。根據(jù)“自頂向下”的設(shè)計(jì)方法,在產(chǎn)品總體設(shè)計(jì)規(guī)劃過(guò)程中,首先建立了啟閉機(jī)、門(mén)槽及閘門(mén)總體布置的三維約束架構(gòu)和主軸線架構(gòu),確保了總體模型主軸線和約束清晰,液壓自動(dòng)抓梁骨架見(jiàn)圖1。
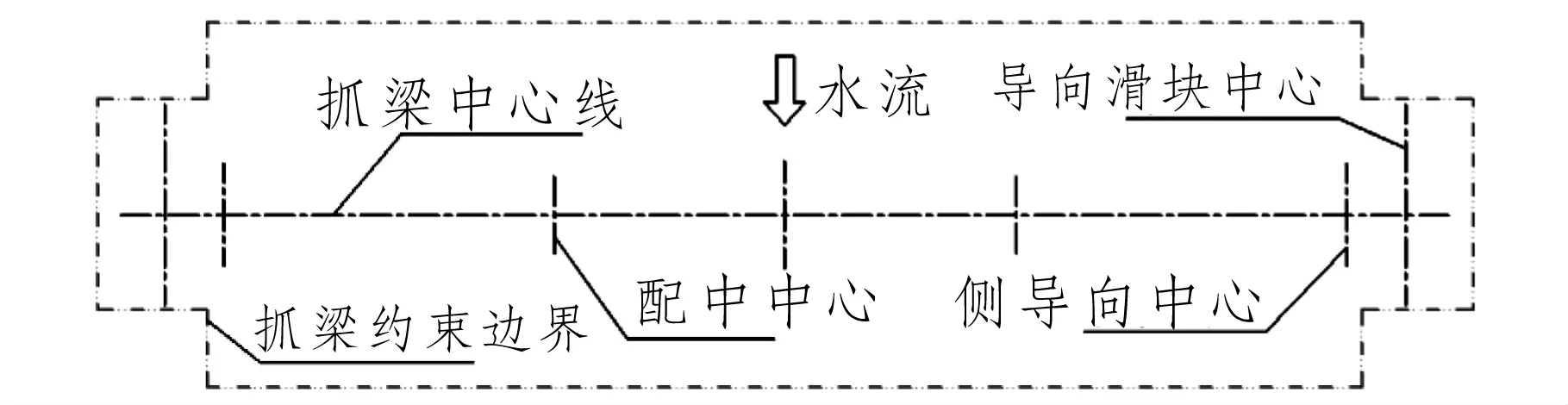
圖1 液壓自動(dòng)抓梁骨架圖
(2)三維結(jié)構(gòu)產(chǎn)品模塊劃分后,液壓自動(dòng)抓梁總體平臺(tái)的三維結(jié)構(gòu)需要與所劃分的模塊對(duì)應(yīng),總體設(shè)計(jì)時(shí)需要?jiǎng)?chuàng)建總體布置的設(shè)計(jì)意圖,然后搭建產(chǎn)品的三維結(jié)構(gòu)(架構(gòu)),其中包括一級(jí)模塊和二級(jí)模塊的三維結(jié)構(gòu)。
(3)模塊位置架構(gòu)的設(shè)計(jì)。在總體設(shè)計(jì)過(guò)程中,按產(chǎn)品設(shè)計(jì)參數(shù)和三維約束架構(gòu)布置各個(gè)模塊的安裝位置,根據(jù)“自頂向下”的三維建模原則,各個(gè)模塊的安裝位置需通過(guò)所建立的安裝坐標(biāo)系確定,因此,要?jiǎng)?chuàng)建整機(jī)位置架構(gòu)并在該架構(gòu)模型中設(shè)置各模塊的安裝位置坐標(biāo)系。
(4)模塊接口架構(gòu)的管理。在前期模塊規(guī)劃和劃分過(guò)程中,應(yīng)充分分析各模塊之間的接口及接口形式,確定典型應(yīng)用接口,包括連接法蘭、安裝孔、空間干涉檢查、檢修空間、力傳遞等,其接口的位置由模塊安裝位置坐標(biāo)予以體現(xiàn)。
(5)模塊間接口關(guān)系的處理原則。為了保持模塊之間的獨(dú)立性,模塊化產(chǎn)品的“自頂向下”設(shè)計(jì)原則要求將接口架構(gòu)坐標(biāo)作為各模塊設(shè)計(jì)的輸入,不允許模塊之間直接的外部引用關(guān)系,避免模塊間通過(guò)外部復(fù)制幾何的形式傳遞設(shè)計(jì)條件,既保持了設(shè)計(jì)接口正確,又保持了兩個(gè)模塊之間的獨(dú)立性。
(6)模塊設(shè)計(jì)。模塊化產(chǎn)品中的模塊要求具有較高程度的獨(dú)立性,模塊本身從結(jié)構(gòu)和功能上是相對(duì)獨(dú)立的,貫徹“自頂向下”的設(shè)計(jì)思路。不同的是模塊本身要繼承接口的約束條件以及相關(guān)模塊的位置信息,即模塊設(shè)計(jì)架構(gòu)需要將接口、位置信息作為模塊自身的外部參考條件。在模塊配置層裝配時(shí),首先按默認(rèn)的方式裝配整機(jī)模塊位置,按坐標(biāo)系對(duì)齊的方式將本模塊位置架構(gòu)安裝到整機(jī)位置架構(gòu)上,然后采用坐標(biāo)系對(duì)齊的方法安裝相關(guān)的一級(jí)接口和二級(jí)接口,再安裝本模塊的參數(shù)架構(gòu)。
3 液壓自動(dòng)抓梁的模塊化設(shè)計(jì)
為滿足大型、超大型水電站建設(shè)的要求和不斷的技術(shù)創(chuàng)新,液壓自動(dòng)抓梁[4]工作水深超過(guò)100 m及大型化趨勢(shì)明顯,其所承受的載荷越來(lái)越大,對(duì)安全可靠性要求越來(lái)越高。但目前各廠家的液壓自動(dòng)抓梁設(shè)計(jì)與制造基本上還停留在傳統(tǒng)的設(shè)計(jì)理念上,在產(chǎn)品設(shè)計(jì)開(kāi)發(fā)手段、模塊化設(shè)計(jì)方法、設(shè)計(jì)周期、設(shè)計(jì)質(zhì)量管理等方面的差距仍然較大。針對(duì)液壓自動(dòng)抓梁模塊化進(jìn)行了以下分析。
3.1 液壓自動(dòng)抓梁的組成及原理
液壓自動(dòng)抓梁通常按其上、下吊點(diǎn)數(shù)量進(jìn)行分類(lèi),一般可分為以下幾種類(lèi)型,液壓自動(dòng)抓梁上下吊點(diǎn)型式見(jiàn)表1。
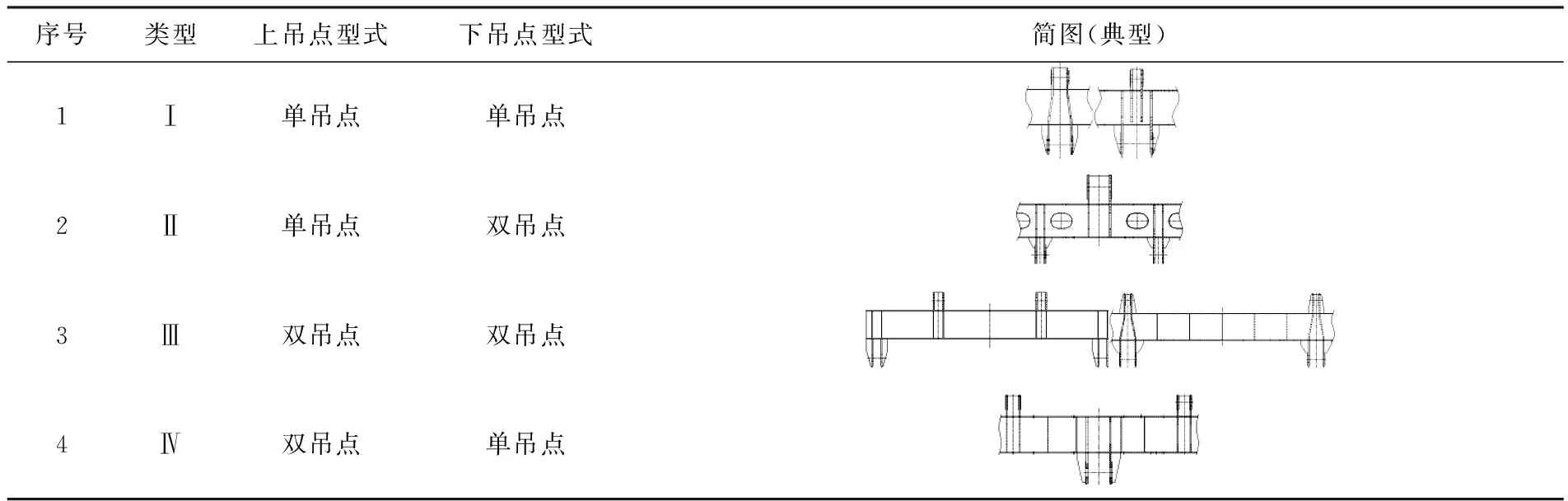
表1 液壓自動(dòng)抓梁上下吊點(diǎn)型式表
液壓自動(dòng)抓梁主要由抓梁體(包括上、下吊耳結(jié)構(gòu)等)、平衡重、主/反導(dǎo)向裝置、側(cè)導(dǎo)向裝置、閘門(mén)定位導(dǎo)向裝置、抓梁/閘門(mén)到位檢測(cè)裝置、穿銷(xiāo)裝置、液壓管線、液壓泵及電纜(主)接頭等組成,液壓自動(dòng)抓梁結(jié)構(gòu)示意圖見(jiàn)圖2。
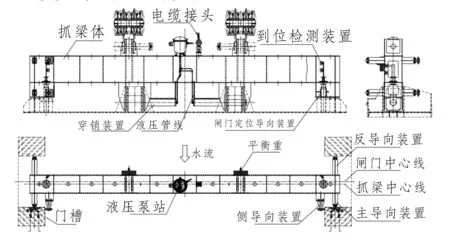
圖2 液壓自動(dòng)抓梁結(jié)構(gòu)示意圖
液壓自動(dòng)抓梁的基本功能是在門(mén)橋式啟閉機(jī)操作控制下,由液壓抓梁液壓控制系統(tǒng)驅(qū)動(dòng)穿退銷(xiāo)裝置、按操作的指令完成抓取和啟閉閘門(mén)。
3.2 液壓自動(dòng)抓梁模塊化設(shè)計(jì)的總體方案
液壓自動(dòng)抓梁模塊化設(shè)計(jì)流程:
已有產(chǎn)品和用戶需求分析→產(chǎn)品功能分析→確定產(chǎn)品系列→確定產(chǎn)品主參數(shù)及參數(shù)范圍→模塊化分析→主要模塊化劃分→模塊結(jié)構(gòu)設(shè)計(jì)(包括模塊標(biāo)準(zhǔn)化和系列化)→三維參數(shù)化建模→編制技術(shù)文件→完成液壓自動(dòng)抓梁模塊化及參數(shù)化設(shè)計(jì)。
液壓自動(dòng)抓梁的機(jī)械結(jié)構(gòu)按模塊化、參數(shù)化、系列化、標(biāo)準(zhǔn)化的設(shè)計(jì)要求進(jìn)行設(shè)計(jì),液壓抓梁模塊劃分見(jiàn)表2。
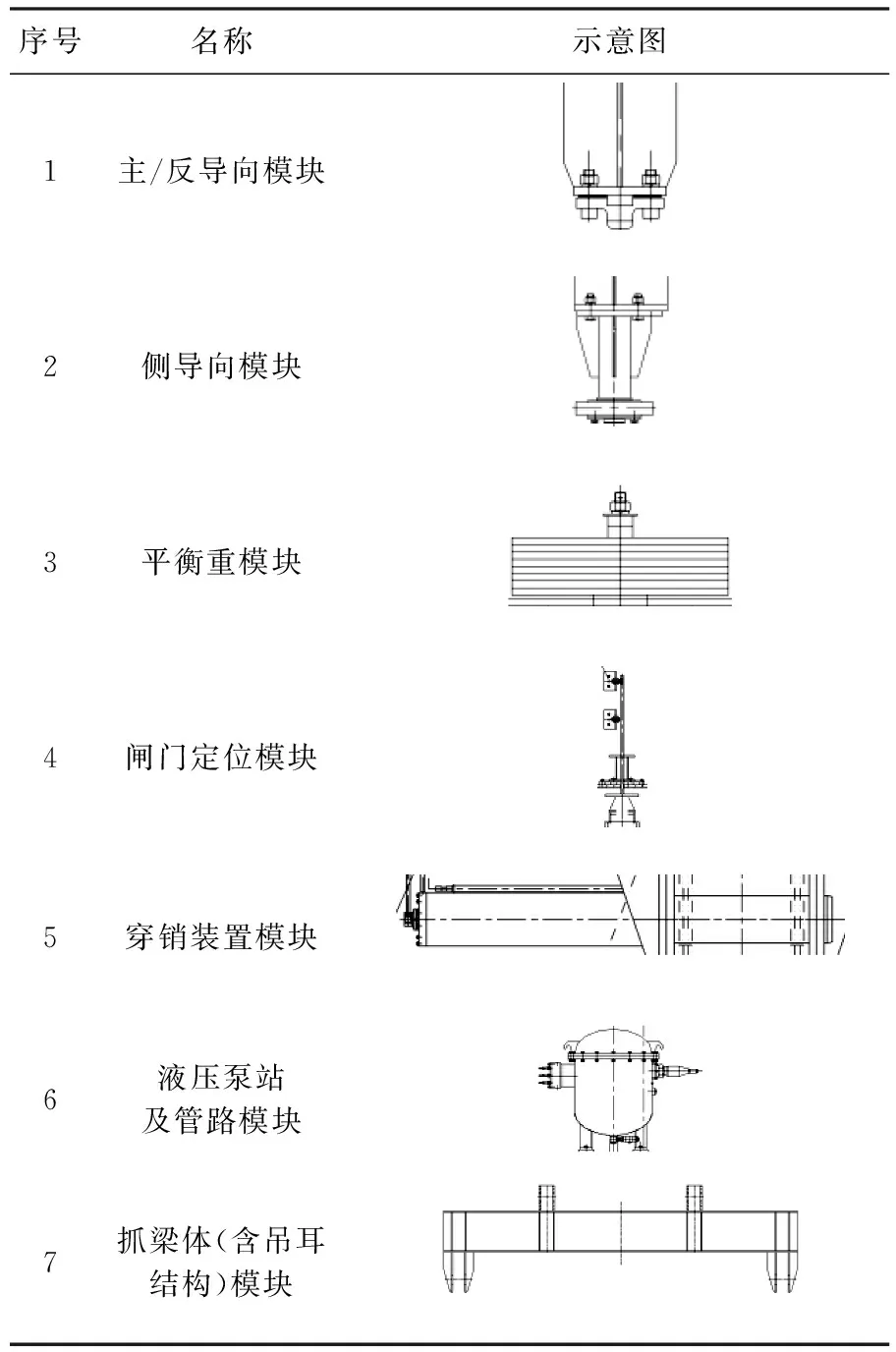
表2 液壓抓梁模塊劃分表
3.3 穿銷(xiāo)裝置模塊化設(shè)計(jì)
鑒于原設(shè)計(jì)方案中的穿銷(xiāo)裝置缸徑和桿徑規(guī)格過(guò)多,達(dá)到了11種且不統(tǒng)一,不利于設(shè)計(jì)和制造塊化和減少密封件等原器件的規(guī)格,增加了備件的準(zhǔn)備時(shí)間和用戶維護(hù)難度。對(duì)此,開(kāi)展了以下研究工作。
(1)液壓自動(dòng)抓梁穿銷(xiāo)裝置規(guī)格統(tǒng)計(jì)。根據(jù)對(duì)歷年約124套液壓自動(dòng)抓梁進(jìn)行的數(shù)據(jù)統(tǒng)計(jì):吊軸直徑范圍為100~360 mm,共有11種油缸直徑與活塞桿徑的組合,其中缸徑范圍為63~160 mm,桿徑范圍為45~90 mm,油缸直徑與活塞桿徑組合情況見(jiàn)表3。

表3 油缸直徑與活塞桿徑組合表 /mm
(2)穿銷(xiāo)裝置模塊化設(shè)計(jì)。適應(yīng)吊軸的直徑范圍為100~360 mm。重新規(guī)劃后,將穿銷(xiāo)油缸/活塞桿優(yōu)化為4種組合規(guī)格(缸徑范圍為63~130 mm,桿徑為45~80 mm),穿銷(xiāo)油缸/活塞桿直徑優(yōu)化情況見(jiàn)表4,穿銷(xiāo)裝置模型見(jiàn)圖3。

圖3 穿銷(xiāo)裝置模型圖

表4 穿銷(xiāo)油缸/活塞桿直徑優(yōu)化表
3.4 液壓泵站模塊化設(shè)計(jì)
3.4.1 液壓泵站性能需求分析
穿銷(xiāo)裝置模塊化和系列化設(shè)計(jì)后規(guī)格減少為四種,從而為液壓泵站模塊化設(shè)計(jì)打下了較好的基礎(chǔ),針對(duì)功能、規(guī)格參數(shù)、控制方式、可靠性進(jìn)行了以下分析:
(1) 液壓泵站為穿銷(xiāo)裝置的吊軸“穿-退”提供驅(qū)動(dòng)力,其吊軸“穿-退”時(shí)間偏差沒(méi)有明確的要求,即吊軸“穿-退”速度可以在較大的范圍由設(shè)計(jì)人員取值。
(2) 一般液壓自動(dòng)抓梁的液壓系統(tǒng)采用常規(guī)控制方式,即用電磁換向閥控制吊軸的“穿-退”,該方式容易實(shí)現(xiàn),但需要有電磁換向閥控制線從啟閉機(jī)通過(guò)主電纜接入到液壓抓梁的泵站內(nèi),需占用較多的電纜芯數(shù)。液壓缸動(dòng)作亦可采用液控方式,由于門(mén)橋式啟閉機(jī)制造廠在液壓專業(yè)不具備相應(yīng)的優(yōu)勢(shì),導(dǎo)致該方式在液壓自動(dòng)抓梁中的使用相對(duì)較少,其控制操作簡(jiǎn)單的優(yōu)勢(shì)沒(méi)有得到發(fā)揮。
(3)為提高液壓泵站的可靠性,對(duì)泵站殼體密封結(jié)構(gòu)、中間接線箱及漏水檢測(cè)等方面需要進(jìn)行進(jìn)一步的優(yōu)化。
3.4.2 液壓泵站的詳細(xì)設(shè)計(jì)方案
(1)經(jīng)核算后得到的四種規(guī)格穿銷(xiāo)裝置吊軸“穿-退”速度范圍為:0.8~4.5 m/min。考慮到同樣需要液壓泵站的液壓耙斗,將液壓泵站統(tǒng)一為兩種規(guī)格,其油泵規(guī)格分別為6.1 mL/r及18 mL/r。
(2)液壓系統(tǒng)由“電磁閥控制”優(yōu)化為全液壓控制,取消了電磁換向閥。通過(guò)雙向油泵和單向閥實(shí)現(xiàn)了油缸“伸出/退回”,同時(shí)亦減少了各類(lèi)元器件及主電纜的芯線數(shù)量,液壓泵站及原理見(jiàn)圖4。經(jīng)13 000余次無(wú)水試驗(yàn)和17 000余次水下(壓力為1.46 MPa)試驗(yàn),其動(dòng)作安全可靠。
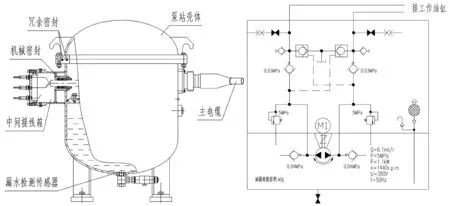
圖4 液壓泵站及原理圖
3.5 導(dǎo)向裝置模塊化設(shè)計(jì)
導(dǎo)向裝置主要包括主/反導(dǎo)向模塊、側(cè)導(dǎo)向模塊。將主/反導(dǎo)向模塊進(jìn)行系列化,通過(guò)調(diào)整參數(shù)改變上下游導(dǎo)向滑塊裝置的長(zhǎng)度,進(jìn)而改變抓梁中心線與門(mén)槽中心線的相對(duì)位置。根據(jù)閘門(mén)的導(dǎo)向形式,通過(guò)選擇最終確定側(cè)導(dǎo)向模塊的形式。圖5為常見(jiàn)抓梁導(dǎo)向滑塊裝置示意圖。
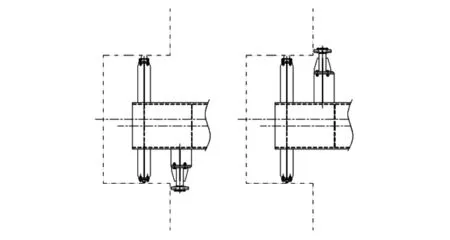
圖5 常見(jiàn)抓梁導(dǎo)向滑塊裝置示意圖
3.6 抓梁梁體(含上、下吊耳)模塊化設(shè)計(jì)
抓梁梁體為液壓自動(dòng)抓梁承載主體。液壓自動(dòng)抓梁上下吊點(diǎn)型式見(jiàn)見(jiàn)表1。
3.6.1 上、下吊耳連接結(jié)構(gòu)設(shè)計(jì)
當(dāng)抓梁上、下吊點(diǎn)有偏差時(shí),目前常用的吊板結(jié)構(gòu)形式有以下幾種(上、下吊耳連接結(jié)構(gòu)形式見(jiàn)圖6)。
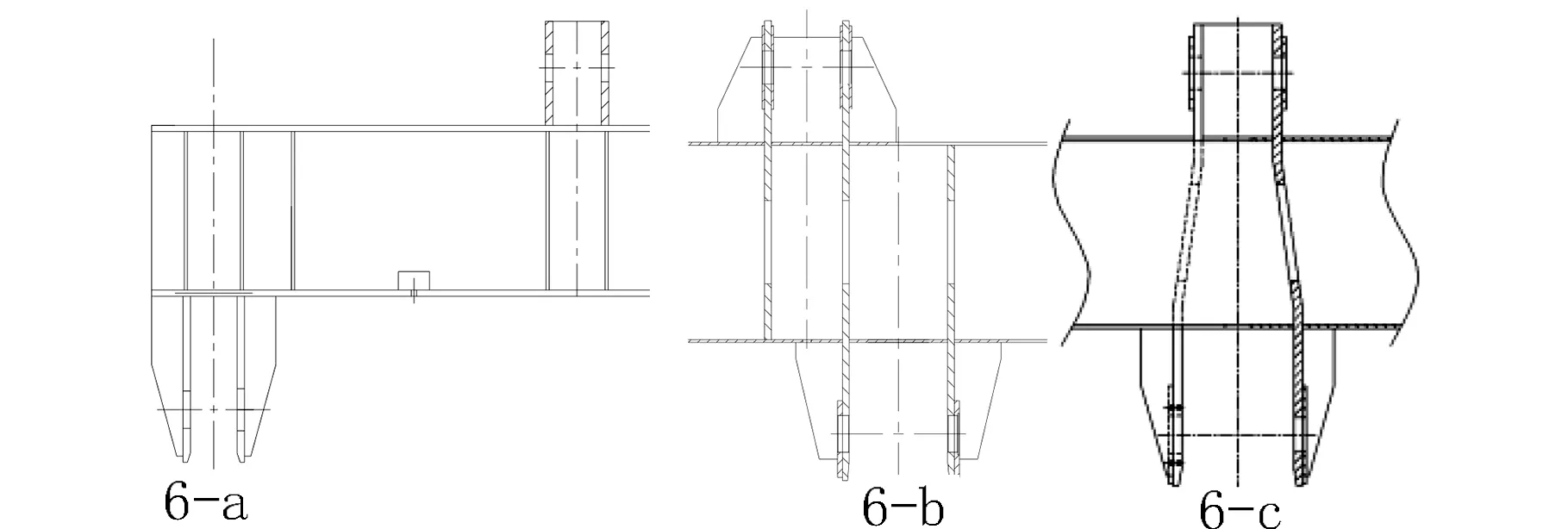
圖6 上、下吊耳連接結(jié)構(gòu)形式圖
對(duì)于偏差較大的采用圖6-a結(jié)構(gòu)形式;對(duì)于偏差較小且有焊接空間的采用圖6-b結(jié)構(gòu)形式;對(duì)于偏差較小且空間較小的采用圖6-c結(jié)構(gòu)形式,即采用吊板折彎方式。
當(dāng)上、下吊耳吊板中心線不是一條直線時(shí),根據(jù)對(duì)歷年來(lái)抓梁中吊板的折彎角度α進(jìn)行統(tǒng)計(jì),取吊板折彎角度α上限為15°(吊板折彎處中心線與豎直方向的夾角),并將15°作為判斷參數(shù),當(dāng)偏角大于15°時(shí),上、下吊板將分開(kāi),并根據(jù)梁高和抓舉容量選擇對(duì)應(yīng)的連接方式,如圖6-b。
3.6.2 抓梁重心問(wèn)題
抓梁在使用過(guò)程中必須保持平衡才能順利通過(guò)門(mén)槽口部。為保證抓梁平衡,一般通過(guò)設(shè)置平衡重來(lái)調(diào)整抓梁重心。而目前所使用的部分抓梁平衡重較重,因此,實(shí)施過(guò)程中將上吊耳板孔心往需設(shè)置平衡重的方向調(diào)整,調(diào)整距離小于理論的平衡距離,通過(guò)這種方式可有效減輕平衡重的重量。為調(diào)整制造偏差,設(shè)置了少量平衡重進(jìn)行調(diào)整[5]。
3.7 到位信號(hào)裝置標(biāo)準(zhǔn)化
按照模塊劃分原則,將抓梁到位信號(hào)裝置統(tǒng)一為以下兩種情況(到位信號(hào)裝置示意圖見(jiàn)圖7)。
(1)對(duì)于閘門(mén)有沖水閥的穿銷(xiāo)到位裝置。根據(jù)穿銷(xiāo)裝置的相關(guān)尺寸,確定了兩種工況下兩個(gè)位置傳感器的位置(圖7-a)。
(2)對(duì)于無(wú)沖水閥的閘門(mén),根據(jù)穿銷(xiāo)裝置的相關(guān)尺寸,只需確定一個(gè)位置傳感器的位置(圖7-b)。
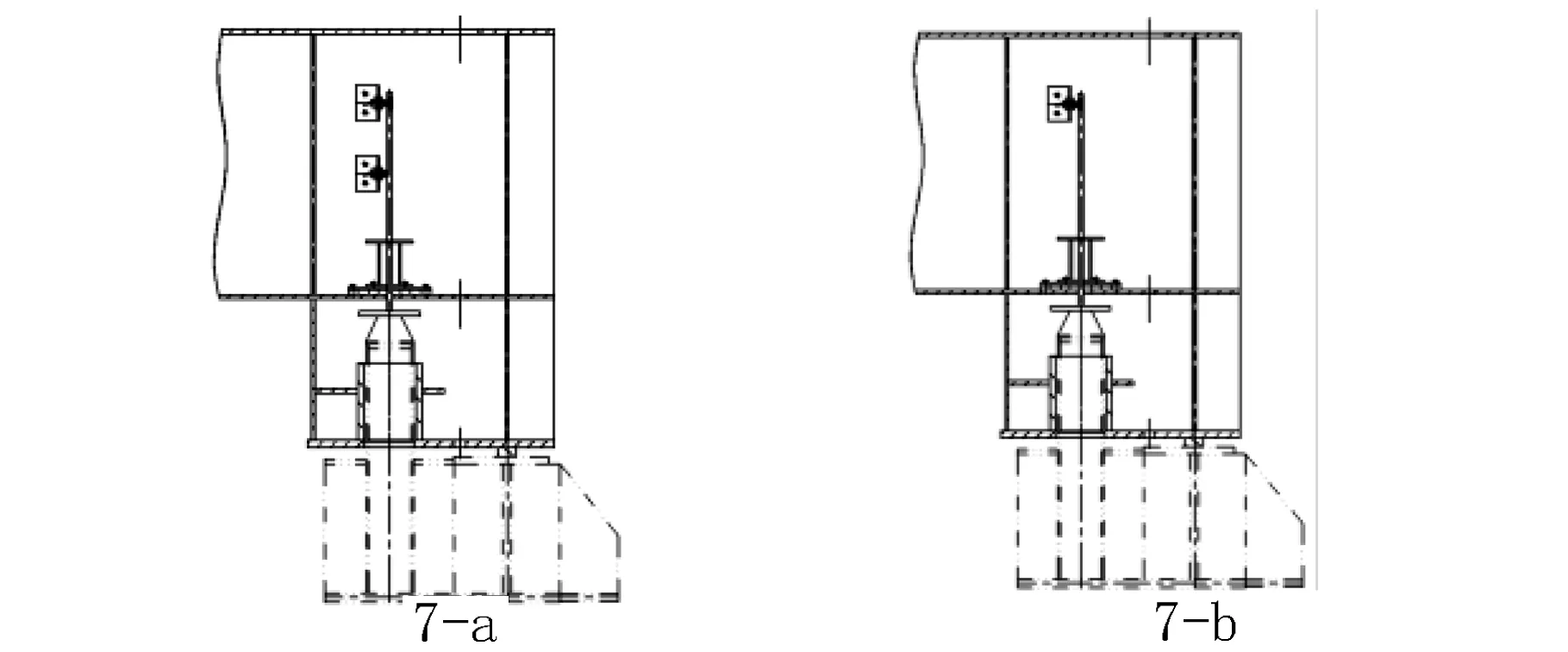
圖7 到位信號(hào)裝置示意圖
4 液壓自動(dòng)抓梁三維快速建模
4.1 三維快速建模的方法
通過(guò)液壓自動(dòng)抓梁三維參數(shù)化設(shè)計(jì),可以實(shí)現(xiàn)三維快速建模。其主要流程為:輸入?yún)?shù)→ilogic讀取參數(shù)→驅(qū)動(dòng)子部件模型→驅(qū)動(dòng)總裝配模型→圖紙輸出,三維快速建模流程見(jiàn)表5。
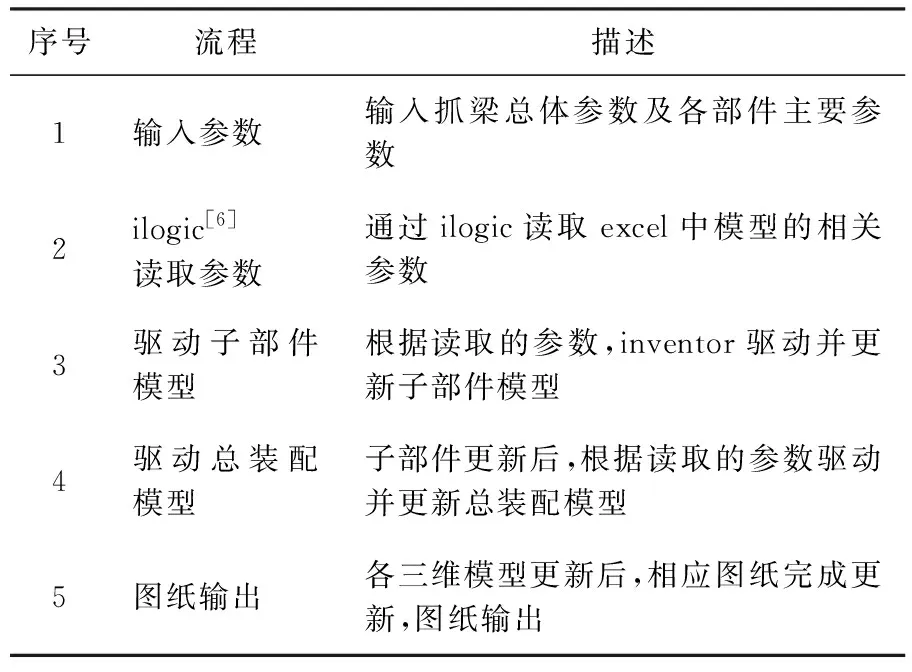
表5 三維快速建模流程表
4.2 應(yīng)用實(shí)例
目前修建的水電站中的啟閉機(jī)多數(shù)都設(shè)置有抓梁,有的甚至設(shè)置了多個(gè)抓梁。為了有效提高設(shè)計(jì)工作的效率,對(duì)抓梁進(jìn)行了模塊化、參數(shù)化設(shè)計(jì)。現(xiàn)已對(duì)以下水電工程:烏東德2×2 000 kN抓梁、巴基斯坦卡洛特2×1 600 kN及2×800 kN抓梁、贊比亞下凱富峽1 250 kN抓梁、漢江孤山2×2 500 kN、2×2 000 kN和2×1 600 kN抓梁、貴州平寨2×630 kN、2×500 kN和2×400 kN抓梁、尼日利亞宗格魯2×1 600 kN和2×500 kN抓梁等進(jìn)行了模塊化、參數(shù)化設(shè)計(jì)。
5 結(jié) 語(yǔ)
對(duì)液壓自動(dòng)抓梁模塊化及三維參數(shù)化快速建模設(shè)計(jì)進(jìn)行了分析與研究,按模塊化、參數(shù)化、系列化、標(biāo)準(zhǔn)化設(shè)計(jì)要求形成了液壓自動(dòng)抓梁模塊化設(shè)計(jì)方案,并通過(guò)參數(shù)驅(qū)動(dòng)實(shí)現(xiàn)了液壓自動(dòng)抓梁三維參數(shù)化快速設(shè)計(jì),提高了設(shè)計(jì)水平和效率,主要研究工作取得了以下結(jié)論:
(1)液壓自動(dòng)抓梁的設(shè)計(jì)需要滿足模塊化和參數(shù)化快速設(shè)計(jì)建模的要求,應(yīng)采用“自頂向下”的設(shè)計(jì)方法, 即設(shè)計(jì)思路是從“總體設(shè)計(jì)”到“模塊設(shè)計(jì)”。
(2)基于液壓自動(dòng)抓梁必須適應(yīng)門(mén)槽約束的要求,應(yīng)先建立啟閉機(jī)、門(mén)槽及閘門(mén)的三維約束架構(gòu)和主軸線架構(gòu),確保總體模型主軸線和約束邊界清晰,并按產(chǎn)品設(shè)計(jì)參數(shù)和三維約束架構(gòu)建立安裝坐標(biāo)系,布置各個(gè)模塊的安裝位置。
(3)模塊化總體設(shè)計(jì)規(guī)劃過(guò)程中,應(yīng)針對(duì)關(guān)鍵部件進(jìn)行系列化、標(biāo)準(zhǔn)化設(shè)計(jì),為提高產(chǎn)品的可靠性和參數(shù)化設(shè)計(jì)打下良好的基礎(chǔ),如導(dǎo)向裝置、梁體結(jié)構(gòu)、主電纜插頭、穿銷(xiāo)裝置及液壓泵站(含接線箱)等的專項(xiàng)改進(jìn)設(shè)計(jì)。
(4)通過(guò)液壓自動(dòng)抓梁模塊化、參數(shù)化設(shè)計(jì)技術(shù)的應(yīng)用,該產(chǎn)品在制造成本、設(shè)計(jì)周期、快速響應(yīng)以及可靠性等方面得到了明顯的提升。
猜你喜歡
海洋信息技術(shù)與應(yīng)用(2022年1期)2022-06-05 07:38:22
裝備制造技術(shù)(2021年2期)2021-07-21 05:38:44
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
現(xiàn)代裝飾(2020年5期)2020-05-30 13:01:56
流行色(2020年1期)2020-04-28 11:16:38
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
中國(guó)核電(2017年2期)2017-08-11 08:00:56
海峽姐妹(2017年7期)2017-07-31 19:08:17
流程工業(yè)(2017年4期)2017-06-21 06:29:52
流程工業(yè)(2017年4期)2017-06-21 06:29:50