考慮交通流非線性特性的交通信號迭代學習控制策略
2021-11-13 08:02:10閻高偉任密蜂
自動化學報 2021年9期
閆 飛 李 浦 閻高偉 任密蜂
1.太原理工大學電氣與動力工程學院 太原 030024
隨著我國城市交通的快速發展,交通擁堵已成為各大城市普遍面臨的交通難題,而交通信號控制作為調控城市交通流運行的最主要措施,其合理的信號配時對更好地利用現有的道路設施和緩解交通擁堵起著至關重要的作用.研究表明,自適應信號控制比固定配時控制能更有效地提高路網的通行效
率[1].如研究者們早期開發出的綠信比-周期長-相位差優化技術(Split-cycle-offset optimization technique,SCOOT)和悉尼協調自適應交通系統(Sydney coordinated adaptive traffic system,SCATS)等自適應交通信號控制系統,這些系統都能根據交通狀況實時地對子區或路網的信號配時進行在線優化.但隨著控制路網規模的不斷擴大,路網交通狀況愈加復雜,從而使得整個路網的協調控制變得十分困難[2-3].另一類常用的基于交通流模型進行信號配時的交通控制方法,因現實中交通流具有很強的不確定性和隨機性,很難對其進行精確的數學建模,因此也難以達到理想的控制效果.侯忠生教授提出的基于排隊長度均衡的交叉口信號配時思想能夠實時動態調整各相位的綠燈時間,從而達到排隊長度均衡的控制目標,并通過采用無模型的自適應控制方法,使得信號控制具有自學習和自適應特性,因此不依賴于交通流模型[4].此后,文獻[5-6]基于排隊長度均衡的控制思想分別采用不同方法對單個交叉口的信號控制進行了研究.
雖然交通流具有復雜的非線性動態特性,但從宏觀角度看,一個城市特定區域的交通流,其每天的運行大體是一個重復的過程,而交通擁堵通常也發生在相同的時間和相同的地點[7].因此,充分利用宏觀交通流運行時固有的周期性特征開展城市交通信號控制的研究,對提高城市路網的通行效率具有十分重要的意義.迭代學習控制(Iterative learning control,ILC)作為一種新型的學習控制策略,是由日本學者Arimoto 等[8]在1984年首次提出,目的在于解決有限區間內重復運行系統的控制問題.其不依賴于系統的精確數學模型,而是一種通過應用先前操作信息來獲得控制輸入使其能夠產生期望輸出,并通過控制輸入不斷地調整最終使實際的輸出逼近理想輸出的控制方法[9].與傳統的控制方法相比,它具有適應性強、易于實現的特點,并且僅需要較少的先驗知識和計算量.迭代學習控制的收斂性是指在迭代軸上具有收斂性,而在時間軸上能夠實現完全跟蹤,而傳統在時間軸上漸進跟蹤的收斂性從理論上講需在時間足夠大時才可能滿足.很顯然,具有完全跟蹤收斂的迭代學習控制更適合城市交通信號控制.因此,本文結合迭代學習控制與城市宏觀交通流運行特點,開展基于迭代學習的城市交通信號控制研究可充分利用迭代學習控制的優點,彌補傳統基于模型的交通控制方法過分依賴交通流模型的不足,從而避開對交通流進行精確建模的難題.
近年來,在交通控制領域已有不少基于迭代學習的交通控制方面的研究成果,如文獻[10]首次提出將迭代學習控制方法應用于高速公路匝道控制中.為進一步增強基于迭代學習的匝道控制方法的魯棒性,文獻[11-12]在現有反饋控制的基礎上加入迭代學習控制,提出了基于迭代學習控制和反饋控制相結合的高速公路交通流控制方法,并討論了輸入受限等問題.考慮現實中的交通系統并非滿足嚴格的重復性,文獻[13]研究了當模型參數和期望軌跡迭代變化時迭代學習控制方法在高速公路交通流控制中的應用.文獻[14]結合模糊控制理論與迭代學習控制設計了交通信號自適應控制器對單個交叉口進行控制.文獻[15]將交通分配與交通控制相結合,采用迭代學習控制方法設計了交通信號控制器對路網進行控制.文獻[16-18]將迭代學習控制應用于多交叉口的交通路網信號控制,通過對交叉口信號的迭代學習控制使路網各條道路的車輛數處于合理水平,以防止交通擁堵的發生,并分析了交通信號的迭代學習控制策略對路網宏觀基本圖的影響.文獻[19]考慮城市交通流運行初態的不確定性,通過引入平均迭代算子,提出了一種具有非一致性迭代區間的迭代學習控制算法,并證明了算法的收斂性.
上述關于城市交通信號迭代學習控制的研究均采用了由Gazis 和Potts[20]早期提出的存儲轉發模型,該模型可將路段內的車輛出入動態情況在整個采樣周期內看做是連續的,避免了更多離散變量的引入,從而在更多的控制方案中得到應用.如前所述,城市交通流具有復雜的非線性動態特性,采用線性的存儲轉發模型無法準確地描述交通流的動態特性.鑒于此,本文在存儲轉發模型的基礎上結合路段內交通流的運行特點,提出了一種描述城市交通流的非線性動態模型.同時,結合宏觀交通流固有的周期性特征,設計了交叉口信號的迭代學習控制策略,并對其收斂性進行了分析.該方法通過對交叉口信號的迭代學習控制,使交叉口各進口道的車輛排隊長度逐漸趨于均衡,從而使綠燈時間得到更充分的利用,有效提高了路網的通行效率.最后通過仿真實驗進一步驗證了該方法的有效性.
本文的組織結構如下:第1 節給出了描述交通流動態特性的非線性交通流模型;第2 節給出了對所研究問題的描述;第3 節給出了考慮交通流非線性特性的交叉口信號迭代學習控制策略并對其收斂性進行了分析;第4 節為仿真研究;第5 節是本文的結論.
1 交通流模型
1.1 交通流模型及狀態空間表達


圖1 交叉口相位示意圖與路段交通流模型Fig.1 The intersection phase and road traffic flow model






2 問題描述
2.1 基本假設


2.2 控制目標
根據路網的宏觀基本圖理論,在路網條件和車輛數相同的情況下,路網內各道路的車輛密度分布越均衡,路網的通行效率就越高[24].而各道路的車輛排隊長度在一定程度上反映了各道路的車輛密度.因此,受文獻[4]提出的排隊長度均衡控制思想的啟發,本文擬采用該思想對交叉口信號進行控制,控制目標為尋找合適的交叉口相位綠燈時間,盡可能使路網中同一交叉口各相位所對應的車輛排隊長度與該相位的綠燈時長相適應,保證交叉口各相位的綠燈時間得到充分利用.
以具有4 個路口的交叉口為例,同一交叉口各路口之間車輛排隊長度的差值可任選其中某一路口的車輛排隊長度作為參考,例如假設選取路口1 的車輛排隊長度作為參考,則可將其他路口的車輛排隊長度與路口1 的車輛排隊長度的差值作為向量,假設該交叉口在第k時刻的4 個路口的排隊長度分別為y1(k),y2(k),y3(k),y4(k),則該交叉口各路口車輛排隊長度的差值情況可描述為


3 迭代學習控制策略與收斂性分析









4 仿真研究
為了驗證本文所述的交叉口信號迭代學習控制策略的有效性,本文選取了太原市某區域的部分道路作為仿真測試區域,道路結構簡圖如圖2所示,并通過VISSIM 和MATLAB 軟件進行仿真研究實驗.該區域共由9 個交叉口和23 條雙向通行車道組成,各路段所包含的車道數如表1,每條車道寬約為3 m,根據HCM2000 手冊可估算出每條單向行駛車道的飽和流量為1 800 veh/h.

圖2 太原市某區域路網結構簡圖Fig.2 The road network structure of one region in Taiyuan

表1 各路段車道數Table 1 The number of lanes in each link
4.1 仿真實驗方案介紹

3)迭代學習控制.仿真時迭代學習控制的期望為各交叉口的車輛排隊長度差值為0.
具體仿真參數設置如下:不同路段間的轉向率直行:左轉:右轉均設置為3 :1 :1;所有交叉口均設置為東西和南北2 個相位;各交叉口信號周期時長均為120 s;迭代學習控制和模型預測控制方案綠信比初始設置為1 :1;每次仿真時長為3 600 s,迭代學習控制的仿真迭代次數為20 次;各路段輸入的起始流量如表2所示;路網各交叉口的學習增益β取值如表3所示,且均滿足收斂條件‖I -βCD‖<1 .其他仿真參數采用VISSIM 的默認值.

表2 路網的輸入流量(veh/h)Table 2 The inflows of the road network(veh/h)

表3 交叉口的迭代學習增益Table 3 The iterative learning gains at different intersections
仿真中分別采用上述的三種控制方案對各個交叉口相位的車輛排隊長度差值,車輛的實際排隊長度,車輛的平均延遲時間,車輛平均停車次數以及所選區域內車輛的平均速度進行對比研究,仿真結果如圖3~9所示.
4.2 仿真結果分析
通過仿真得到固定配時,模型預測控制和迭代學習控制三種方案下的交叉口各相位的車輛排隊長度的差值,如圖3所示.圖4 和圖5 分別給出了不同控制方案下交叉口4 和交叉口9 各相位的實際車輛排隊情況.此處選擇交叉口4 和交叉口9 是由于交叉口4 為該區域的主要干道交叉口,而交叉口9為不同于其他路口的丁字路口,交通情況復雜容易造成擁堵.圖6 反映了交叉口車輛的平均排隊長度差值隨迭代次數的變化情況.上述仿真實驗及結果分析表明當信號控制方式為固定配時時,各交叉口車輛的平均排隊長度差值波動相對較大,而迭代學習控制和模型預測控制兩種自適應控制方案下車輛的平均排隊長度差值波動相對較小.從圖3(b)和圖3(c)可以看出,與模型預測控制相比,迭代學習控制方案下各交叉口車輛的平均排隊長度差值波動更小,表明車輛在路段中的分布更加均衡.與此同時,通過仿真得到路網中車輛的平均延遲時間如圖7所示,可以看出,與固定配時和模型預測控制方案相比,經過20 次迭代學習控制后,路網中車輛的平均延遲時間明顯減少;圖8 的仿真結果為車輛的平均停車次數,可以看出迭代學習控制方案下車輛的平均停車次數整體也少于固定配時和模型預測兩種方案下車輛的平均停車次數;關于3 種控制方案對路網中車輛平均速度的影響,通過圖9 可以看出,進行20 次迭代學習控制后路網內車輛的平均速度整體也略高于固定配時和模型預測控制配時下車輛的平均速度.綜合仿真結果的分析,迭代學習控制方案可在不改變道路設施的基礎上,通過對交叉口信號的控制調節,能有效提高路網的通行效率.

圖3 三種控制方案下各交叉口相位車輛排隊長度差值Fig.3 The differences of queue lengths at different phases of each intersection for the three control schemes

圖4 三種控制方案下交叉口4 各相位的車輛排隊情況Fig.4 The queue lengths at Intersection 4 for the three control schemes
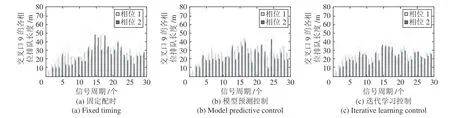
圖5 三種控制方案下交叉口9 各相位的車輛排隊情況Fig.5 The queue lengths at Intersection 9 for the three control schemes

圖6 平均車輛排隊長度差值隨迭代次數的變化情況Fig.6 The average difference of queue lengths of all intersections after each iteration

圖7 三種控制方案下路網的平均延遲時間Fig.7 The average delay time of road network for the three control schemes

圖8 三種控制方案下路網的平均停車次數Fig.8 The average number of stops for the three control schemes

圖9 三種控制方案下路網內車輛的平均速度Fig.9 The average speed of vehicles for the three control schemes
5 結束語
針對城市交通流具有的非線性特性,建立了描述交通流運行過程的非線性交通流排隊模型.并在建模的基礎上利用宏觀交通流所固有的周期性特征,設計了交叉口信號的迭代學習控制策略,證明了迭代學習律的收斂性.最后以太原市某區域路網為例,通過經典的韋伯斯特法,模型預測控制算法和本文方法進行了對比仿真實驗.實驗結果表明,通過對交叉口信號的迭代學習控制,可以使交叉口進口道的車輛排隊長度逐漸趨于均衡,提高交叉口信號有效綠燈時間的利用率,從而改善路網的通行效率.迭代學習控制方法因其計算量小,從而易于對路網進行集中式控制.但隨著控制路網規模的增大,不同區域間交通流特性的差異性會增強.因此,為了適應大規模城市路網的控制,未來開展對分散式城市道路交通信號迭代學習控制方法的研究將會有更大的應用價值.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
光學精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
核科學與工程(2015年4期)2015-09-26 11:59:03