基于自學習中樞模式發(fā)生器的仿人機器人適應性行走控制
2021-11-13 08:01:42劉成菊耿烷東張長柱陳啟軍
自動化學報 2021年9期
劉成菊 耿烷東 張長柱 陳啟軍
1.同濟大學電子與信息工程學院上海201804
仿人機器人具有雙手、雙足、軀干等人類外形特征,無需改造就能適應人類日常環(huán)境和使用工具,更容易成為輔助人類生活、工作和完成危險作業(yè)的幫手,因此可認為是下一代服務機器人最典型、最友好的本體特征.行走控制是仿人機器人的基礎科學問題,但仿人機器人自由度多、傳感器多,是一個不穩(wěn)定的非線性強耦合動力學系統(tǒng),行走的自然性、環(huán)境適應性、突發(fā)環(huán)境變化時的平衡控制是長期困擾仿人機器人發(fā)展和應用的難題.目前,行走控制方法主要基于編程作業(yè)機制,使得仿人機器人的本體特性不能得到充分的發(fā)揮[1].普遍采用的基于零力矩點(Zero moment point,ZMP)的步行控制方法[2-7],允許機器人按照預先設計的軌跡行走并保持平衡,但是由于預先設計的軌跡是固定的,一旦地形發(fā)生變化,則機器人無法完成行走任務.對于機器人的環(huán)境適應性行走控制,需要具有自適應產(chǎn)生軌跡的能力.
改變傳統(tǒng)的思維模式,研究和抽象生物的行走機理并加以模仿,可能是突破機器人行走控制瓶頸的有效途徑.該思想也引起相關學者的廣泛關注,其中,比較著名的方法是基于中樞模式發(fā)生器(Central pattern generator,CPG)的生物誘導的機器人行走控制方法[8-13].由于其突出的適應性優(yōu)勢已經(jīng)廣泛應用在機器人運動控制中,特別是在游泳、爬行、多足機器人的運動控制中取得了成功實驗效果[14-21].然而目前存在的CPG 模型基本只能產(chǎn)生正弦或類似正弦的輸出,如Hopf模型[22-23]、Kuramoto 模型[24-25]等.即使存在能夠在一定程度上調(diào)整輸出波形形狀的模型,如Matsuoka 模型[26-28],但是模型參數(shù)與輸出波形的形狀之間沒有明確的對應關系,只能通過試湊法不斷地嘗試.并且只能對輸出進行簡單調(diào)整,無法準確模擬某一特定形狀.在Righetti 等[29-30]的工作啟發(fā)下,我們提出了一種基于快速傅里葉變換的自學習CPG(Self-learning CPG,SL-CPG)模型.提出的模型可以學習周期性任意形狀輸入信號,解決了以往CPG 模型輸出上的局限性.自學習CPG 模型可以通過調(diào)整參數(shù)在線平穩(wěn)調(diào)整其輸出頻率和幅值,為引入傳感器信號提供了便利.
另一方面,如何將CPG 模型應用于機器人的節(jié)律運動控制是該研究的另一難點問題.目前CPG機器人生物誘導控制方法應用較多的是關節(jié)空間控制法.通常將一個CPG 單元分配給一個自由度,優(yōu)化CPG 拓撲網(wǎng)絡,生成多維協(xié)調(diào)信號,直接控制關節(jié)運動實現(xiàn)運動控制.關節(jié)空間方法在爬行、游泳、多足等機器人上取得了突出的研究成果.但是仿人機器人自由度多、結構復雜,如果直接將CPG 分配到機器人關節(jié)空間,利用CPG 之間的相互耦合組成CPG 網(wǎng)絡,網(wǎng)絡龐大,參數(shù)眾多.一些學者將CPG 和進化算法結合來實現(xiàn)仿人機器人的行走控制[31-34],參數(shù)的進化是CPG 產(chǎn)生滿足要求控制信號的關鍵,但參數(shù)和CPG 網(wǎng)絡的輸出軌跡的關系并不直觀.部分學者探索在機器人的工作空間來有效利用CPG 的適應性[35-41],取得了不錯的實驗效果.
基于學者們的前期研究,我們提出了生物誘導的仿人機器人工作空間行走模型.本文中,我們采用自學習CPG 模型在線生成仿人機器人質(zhì)心和腳掌軌跡.分別利用兩組SL-CPG,通過對示例軌跡的訓練學習,形成可以在線調(diào)制的軌跡生成器.通過傳感器測得機器人自身姿態(tài)信息作為軌跡發(fā)生器的反饋輸入,因此可以根據(jù)具體的地面環(huán)境適應性調(diào)節(jié)輸出軌跡.機器人的行走速度、腿的支撐段和擺動段的時間、邁步跨度和抬腿高度等可以實時地調(diào)整,這是實現(xiàn)環(huán)境適應性行走的重要前提條件.基于工作空間的方法大大簡化了CPG 網(wǎng)絡和參數(shù)整定,不需要事先獲得地形條件信息,也不依賴于地形測量的距離傳感器信息.仿人機器人坡面環(huán)境適應性行走實驗驗證了控制系統(tǒng)的有效性.
1 自學習CPG 模型
自學習CPG 模型采用分層式設計:底層為記憶單元,高層為協(xié)調(diào)單元.記憶單元負責學習關節(jié)的參考控制信號,協(xié)調(diào)單元負責調(diào)整各關節(jié)的相位關系并完成步態(tài)控制.該模型與其他模型的主要區(qū)別在于把相位同步和關節(jié)的運動模式控制分離開來.將相位振蕩器模型(如Kuramoto 模型)作為新模型的協(xié)調(diào)單元,僅用來產(chǎn)生相位同步的信息.而把關節(jié)的運動模式控制作為記憶單元單獨進行設計.產(chǎn)生的關節(jié)控制信號不僅可以保證相位鎖定還能實現(xiàn)各種關節(jié)運動模式.而記憶單元采用傅里葉級數(shù)的思想,用有限次的諧波去逼近一個周期函數(shù),學習過程采用Hebbian 學習方法,可以在線學習任意輸入,并能夠把學到的信息儲存起來,通過協(xié)調(diào)單元的調(diào)節(jié)作用,產(chǎn)生合適的輸出.
1.1 自學習CPG 原理
任意一個周期函數(shù)都可以按傅里葉級數(shù)展開為

其中,a是常數(shù)項,ω是基波的角速度.a和ω很容易計算得到.去掉直流分量整理為
其中,i是整數(shù),i ≥1.因此bn和φn如果確定,那么前i個諧波和就可以用來近似y′.
自學習CPG 的基本思想如圖1所示.每個圓代表具有自學習能力的諧波.y′代表需要學習的示例軌跡,P代表系統(tǒng)的輸出,F是y′與P的差值.隨著學習訓練的進行,P將逐漸趨向于y′,F趨向于0,由于忽略了高次諧波,F最終不會為0.但是如果采用足夠多的諧波,F將足夠小,可以近似于0,此時對系統(tǒng)的影響可以忽略不計.這也就意味著系統(tǒng)的輸入和反饋可以切斷,系統(tǒng)的輸入為0,學習過程停止,系統(tǒng)變?yōu)橐粋€自治的系統(tǒng),系統(tǒng)的輸出P雖然和y′有輕微變化,但非常接近y′.基于此,CPG模型可以學習和生成任意周期性信號.
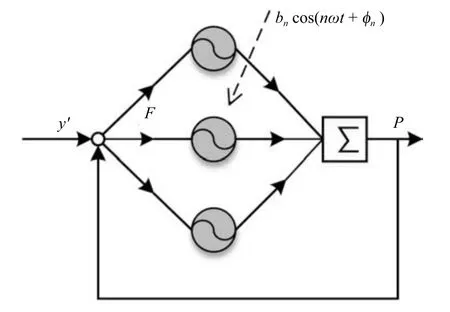
圖1 自學習CPG 模型學習基本過程Fig.1 Basic learning process of SL-CPG model
1.2 CPG 模型數(shù)學描述
1.2.1 Hopf 振蕩器模型
Hopf 振蕩器易于獨立調(diào)節(jié)波形的幅值和頻率,因此本文采用Hopf 振蕩器設計自學習CPG 模型,Hopf 振蕩器描述如下:

1.2.2 幅值學習
在Hopf 振蕩器模型中加入一個擾動項εF,則式(3)變?yōu)?/p>

其中,F=P -y′,ε為常數(shù).進行變量替換,令x=rcos(t)和x=rsin(t),式(4)變?yōu)?/p>
觀察式(2),需要確定的變量就是幅值a和相角nωt+φn.而在式(5)中,μ控制幅值,φ是極坐標系下極角變量,相角可以直接通過φ得到.對于如何得到μ,我們借助于Hebbian 學習,設計了一個新的變量α來取代μ,使得α也變成一個動態(tài)項,來學習輸入信號的幅值,如式(6)所示.
其中,η是學習率,ω是基波角速度,可以通過對輸出信號y′進行快速傅里葉變換得到,n代表第n次諧波.最終采用式(6)完成對周期性信號y′的學習,系統(tǒng)的輸出如下:
1.2.3 保持模型內(nèi)相位同步
經(jīng)過上面的步驟,已經(jīng)得到了一個能夠學習任意周期波形的模型,但這只是一個最基本的模型,要實際應用還需要進一步改進.主要的問題在于:無法調(diào)整該模型輸出波形的相位.我們不僅要控制一個關節(jié),而是要同時控制多個關節(jié)并協(xié)調(diào)它們之間的相位使之滿足一定的步態(tài).因此,如果不能調(diào)整任一輸出的相位,模型間是不能協(xié)調(diào)工作的,也就不能用來控制行走.所以,單個模型必須能夠根據(jù)上一層的控制信號改變輸出波形的相位.
根據(jù)設計的模型,每個輸入都是由一組諧波疊加進行逼近的,當學習結束時,這組諧波之間其實也形成了一定的相位關系.如果在上層控制信號發(fā)出改變輸出波形相位的命令后,這個相位關系還能夠一直保持,那么就能保證調(diào)整相位后,輸出波形的形狀不變.因此,首先要記錄這個學習到的相位關系,另外,還要能夠保持這個相位關系.
定義θn=φn-nφ1,θn表示學習完成以后第n次諧波與基波之間的相位差.當F設置為0 之后,θn將不再發(fā)生變化.采用Kuramoto 模型的方法,此時學習結束后的模型為
當有高層信號使得基波相位發(fā)生變化時,其他諧波相位也會立刻跟隨基波相位發(fā)生變化,最終保持之前的相位關系.因此疊加之后的波形除了相位產(chǎn)生了平移,波形形狀保持不變.
1.2.4 保持模型間相位同步
通過加入Kuramoto 項,保持了諧波與基波間的相位差,當基波相位發(fā)生變化時,各次諧波的相位能進行跟隨,因此保證了模型能夠輸出正確的波形.為了保持各自學習CPG 之間的相位差,也就是各模型間的相位差,只需要另外加入Kuramoto 項,使相互有連接關系的模型基波之間保持一定的相位差.
1.3 自學習CPG 的參數(shù)調(diào)制
當自學習CPG 模型完成對示例信號的訓練學習后,模型成為一個自治系統(tǒng).在式(8),αn和ω分別影響CPG 輸出的幅值和頻率.引入幅值調(diào)節(jié)系數(shù)kα,頻率調(diào)節(jié)系數(shù)kω和直流分量調(diào)節(jié)系數(shù)ka如式(9)所示,可以分別獨立調(diào)節(jié)幅值和頻率分別為示例軌跡的kα和kω倍,這有利于自學習CPG 根據(jù)不同控制需求產(chǎn)生適應性的軌跡.
圖2 表示自學習CPG 模型對一個示例軌跡的學習情況,其中虛線代表示例軌跡,實線代表自學習CPG 模型的輸出.當為t <4 s 時為模型學習階段,當t= 4 s 時,模型學習完成,取消示例軌跡的輸入,此時自學習CPG 仍然能夠按照示例軌跡的形狀繼續(xù)生成.
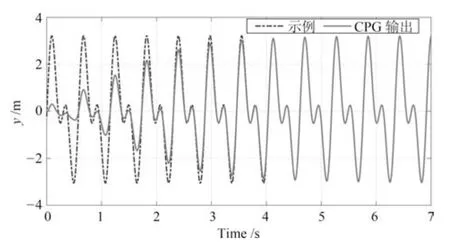
圖2 自學習CPG 學習結果Fig.2 The learning results of SL-CPG
圖3 表示訓練完成后分別調(diào)節(jié)幅值和頻率調(diào)節(jié)參數(shù)調(diào)節(jié)CPG 的輸出.在t= 0~0.6 s,kα= 1 和kω=1,CPG 輸出保持和參考軌跡相同的幅值和頻率;在t= 0.6~1.6 s,kα=0.5 和kω=1,CPG 輸出幅值為參考軌跡的一半,頻率相同;在t >1.5 s,kα= 1 和kω= 0.5,CPG 輸出幅值和參考軌跡的相同,頻率是參考軌跡的一半.
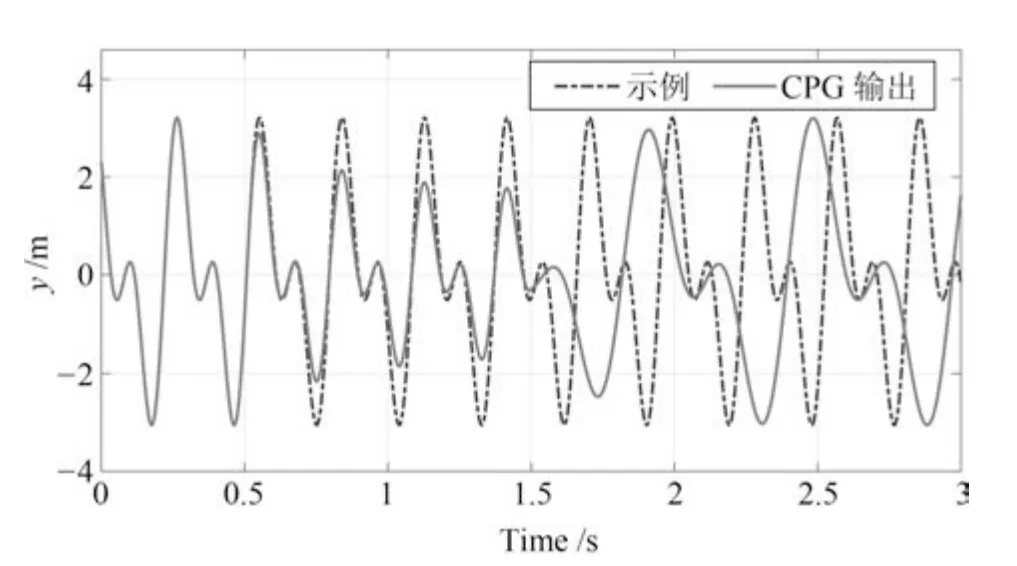
圖3 自學習CPG 參數(shù)調(diào)制Fig.3 The parameters modulation of SL-CPG
2 控制系統(tǒng)設計
本文提出的仿人機器人適應性行走的控制系統(tǒng)的整體構架如圖4所示,自學習CPG 軌跡發(fā)生器包括質(zhì)心、腳掌軌跡發(fā)生器和運動引擎.
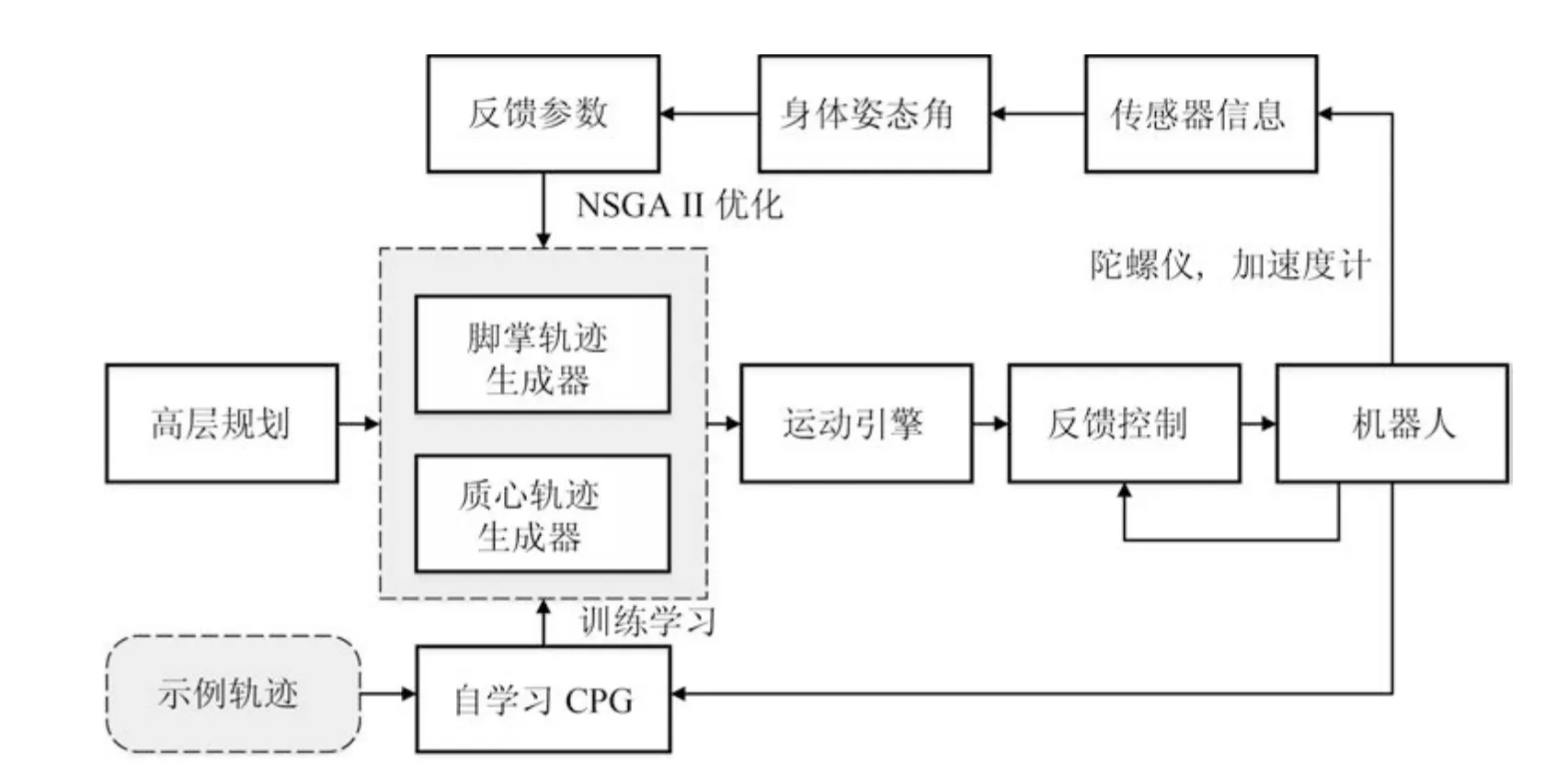
圖4 整體控制系統(tǒng)構架Fig.4 The architecture of the control system
2.1 質(zhì)心軌跡發(fā)生器
利用自學習CPG 模型對示例的仿人機器人行走時的軌跡進行訓練學習,能夠得出機器人的三維質(zhì)心軌跡發(fā)生器,質(zhì)心軌跡在垂直方向上與擺動腳在垂直方向規(guī)律一致,CoMz上軌跡由擺動腳軌跡映射得出.這里采取兩個自學習CPG 模型來訓練學習質(zhì)心在x和y方向上的運動,為保持軌跡的同步性,兩個發(fā)生器之間的相位差設為0.圖5 和圖6 分別表示機器人x方向和y方向的上質(zhì)心的軌跡,其中虛線表示示例軌跡,實線表示自學習CPG 模型的輸出軌跡.
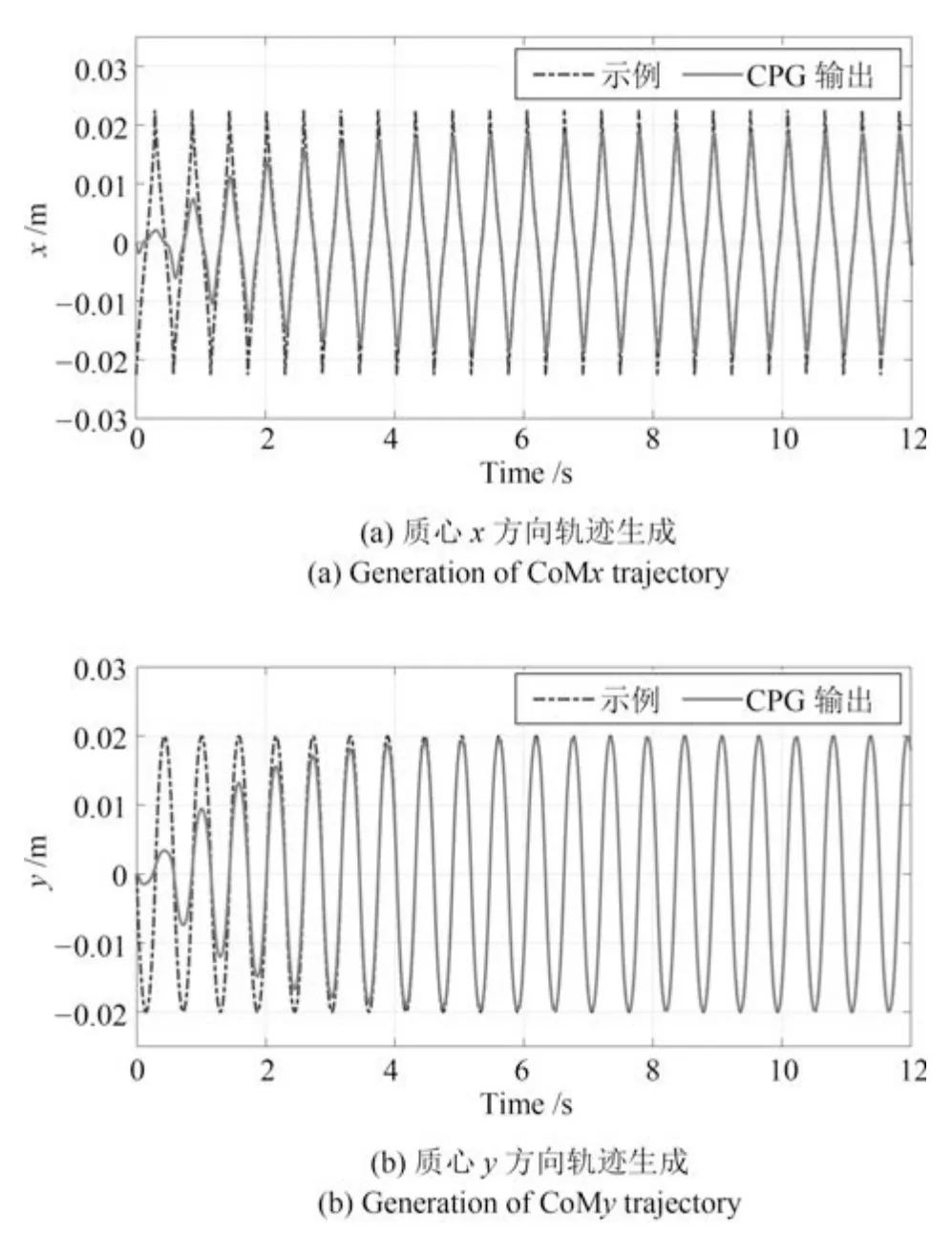
圖5 質(zhì)心x 方向和y 方向軌跡生成Fig.5 The generated CoMx and CoMy trajectories
2.2 腳掌軌跡發(fā)生器
機器人在行走時,擺動腳的軌跡在y方向上是恒定的,所以只需要訓練兩個維度的軌跡.和質(zhì)心軌跡的訓練類似,同樣采用了兩個自學習CPG 模型,分別在x和z方向上進行訓練,這兩個方向的幅值分別表示了行走的步幅和邁步的跨度,所以通過調(diào)節(jié)CPG 的參數(shù),可以很方便地調(diào)節(jié)機器人行走的上述參數(shù).機器人在行走過程分為左腳支撐階段和右腳支撐階段,在每只腳對應的支撐階段腳掌軌跡為一段直線,自學習CPG 針對連續(xù)直線的學習會有較大的誤差.
本文采用雙腳擺動軌跡聯(lián)合的改進思路,把雙腳擺動軌跡聯(lián)合,只學習擺動階段軌跡,然后通過對左右腳支撐的判斷,實現(xiàn)雙腳軌跡的分離.
圖6(a)和6(b)為改進前自學習CPG 模型分別對腳掌軌跡的x和z方向的學習結果,在直線段有明顯的誤差.圖7(a)和7(b)為改進后自學習CPG 模型分別對腳掌軌跡的x和z方向的學習結果,每幅圖的上半部是左右腳聯(lián)合的擺動階段軌跡,下半部是軌跡分離后單腳的軌跡.其中虛線為示例軌跡,實線為自學習CPG 腳掌軌跡生成器輸出軌跡.
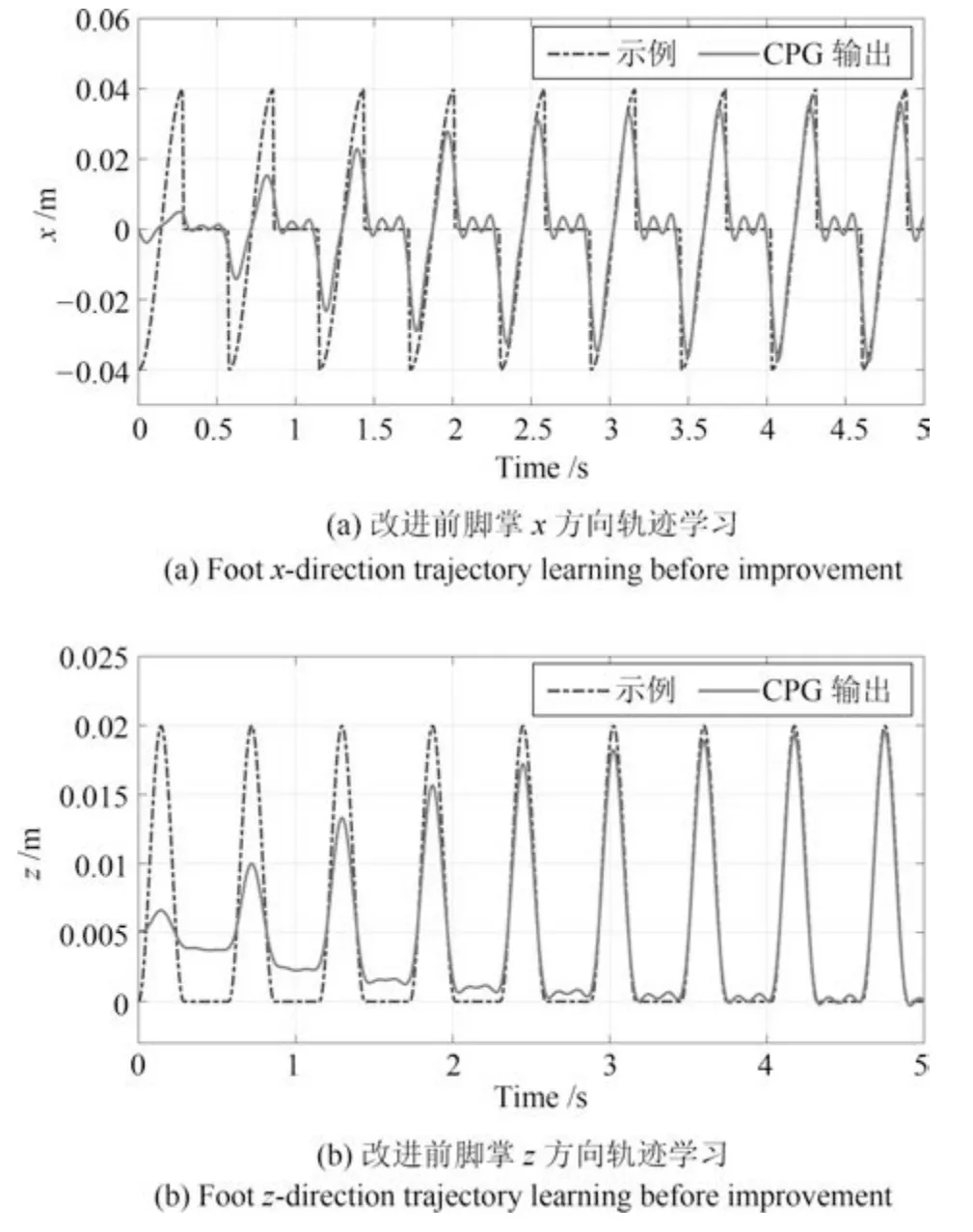
圖6 CPG 模型改進前腳掌x 方向和z 方向軌跡學習結果Fig.6 The learning results of the x and z direction foot trajectories before CPG model improved
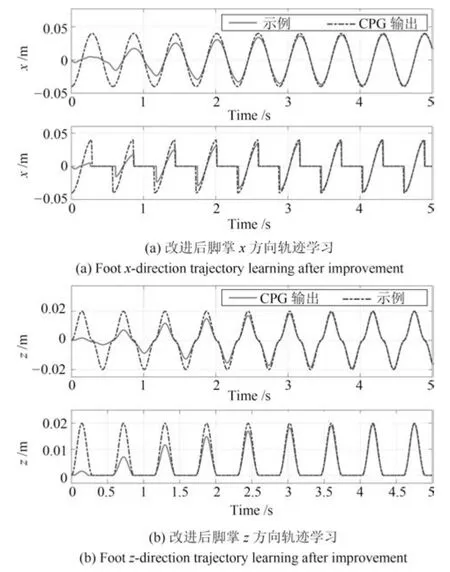
圖7 CPG 模型改進后腳掌x 方向和z 方向軌跡學習結果Fig.7 The learning results of the x and z direction foot trajectories after CPG model improved
2.3 行走適應性
在人類坡面行走過程中,會通過前庭反射來調(diào)制姿態(tài),例如身體質(zhì)心的位置,來避免傾覆.實現(xiàn)機器人環(huán)境適應性的關鍵是如何通過對機器人自身狀態(tài)和外部環(huán)境的感知所獲得反饋信息,實現(xiàn)運動控制系統(tǒng)的自我調(diào)節(jié).機器人身體姿態(tài)角度θpitch可以反映機器人的行走坡面情況,因此以身體姿態(tài)角度作為反饋信息實時在線調(diào)制CPG 的輸出,調(diào)整質(zhì)心和腳掌軌跡的輸出軌跡,從而實現(xiàn)仿人機器人的坡面適應性行走控制,反饋設計如圖8所示.
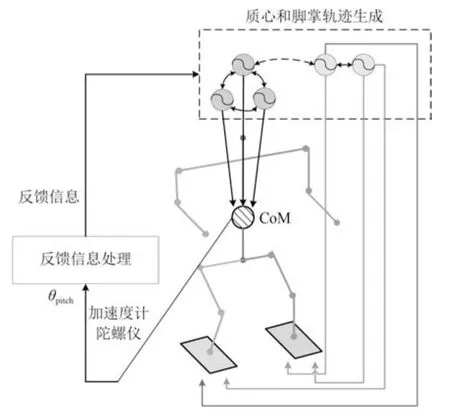
圖8 反饋控制回路框圖Fig.8 The block diagram of feedback control loop
2.4 運動引擎
在機器人系統(tǒng)中,任務空間與關節(jié)空間的關系可描述為

其中,T= [T1···TM]T代表了末端的位置和姿態(tài),而θ=[θ1···θN]T中的θi則表示了連桿i相對于連桿i-1 的轉角或位移.
若利用分解速度控制法(Resolved motion rate control,RMRC)[42]來控制關節(jié)的角速度,可將機器人系統(tǒng)的微分運動學及逆微分運動學表示為
其中,J(θ)為雅可比矩陣,J-1(θ)為其逆矩陣.
如果N >M,則機器人系統(tǒng)是冗余的.當雅可比矩陣非滿秩時(即系統(tǒng)為冗余時),其逆矩陣不存在,利用偽逆矩陣代替雅可比矩陣的逆矩陣[43]:

為了防止奇異性問題,可使用最小二乘法表示其偽逆矩陣為

其中,參數(shù)λ為阻尼系數(shù),保證雅可比矩陣J(θ)為滿秩的.
基于微分逆運動學的機器人運動控制引擎的設計方法如圖9所示,其中Tref和Treal代表參考軌跡和實際軌跡,J代表雅可比矩陣,θreal是實際關節(jié)角.
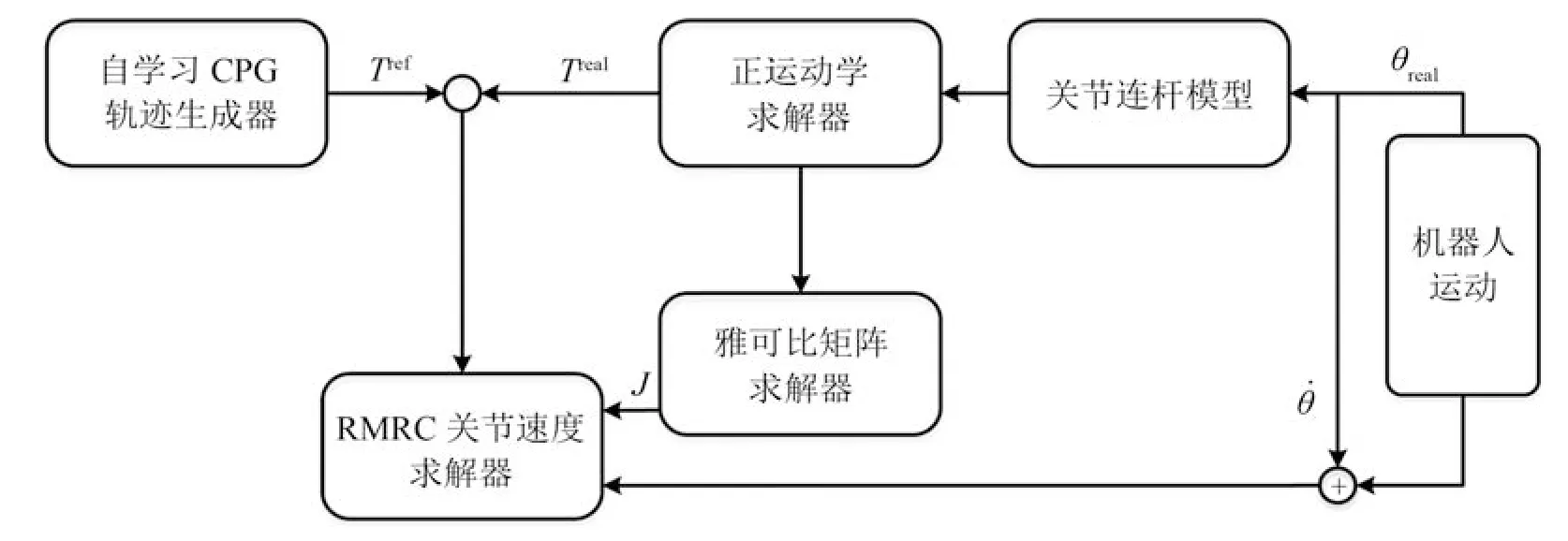
圖9 基于微分逆運動學的機器人運動控制引擎設計框圖Fig.9 Block diagram of robot motion control engine based on differential inverse kinematics
3 仿真與實驗
3.1 反饋回路設計
NAO 仿人機器人作為驗證平臺.NAO 高58 cm,裝有3 軸加速計和2 軸陀螺儀,有25 個自由度,本文只考慮兩條腿上的10 個自由度.利用傳感器陀螺儀和加速度計均可計算機器人的身體姿態(tài)角.加速度計反映的是一種靜態(tài)特性,而陀螺儀反映的是一種動態(tài)特性.由于機器人系統(tǒng)的高頻振蕩和傳感器噪聲的影響,計算得到的身體姿態(tài)角度不能客觀準確地反映機器人的姿態(tài).本文設計了一種補償濾波器,如圖10所示,加速度傳感器計算的身體姿態(tài)角θacc通過低通濾波器濾掉高頻部分,陀螺儀計算出來的身體姿態(tài)角θgyro通過高通濾波器濾掉低頻部分,再將兩者加權求和得到最終的身體姿態(tài)角θ

圖10 身體姿態(tài)角計算Fig.10 Calculation of body attitude

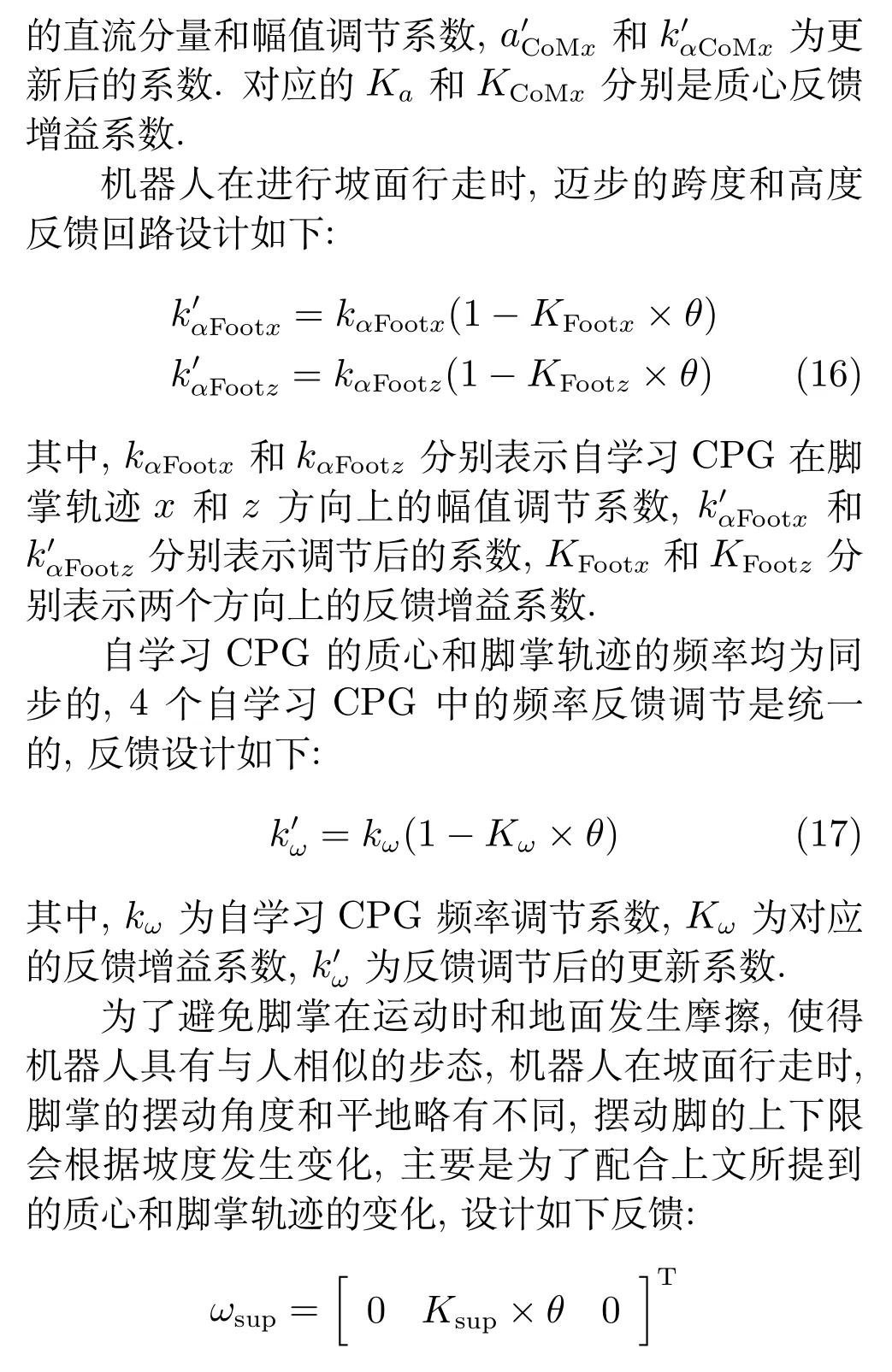
坡面實驗環(huán)境設置包括上坡、平地以及下坡三種,上下坡面的坡度設定為10°左右.在上坡過程中,機器人質(zhì)心需要前傾,避免發(fā)生打滑;在下坡過程中,機器人應后仰,即質(zhì)心稍滯后,避免發(fā)生傾覆.將身體姿態(tài)角作為自學習CPG 產(chǎn)生質(zhì)心軌跡x方向的反饋信息,設計如下:

3.2 參數(shù)優(yōu)化
為快速獲取最佳的反饋控制參數(shù),本節(jié)基于Deb 的NSGA-II 算法[44]對控制系統(tǒng)進行優(yōu)化.本文用到了二元競爭選擇,中間交叉和高斯突變等方法,實驗的仿真是在Webots 環(huán)境下進行.fitnessatti和fitnessdis是設計的兩個目標函數(shù)來聯(lián)合優(yōu)化質(zhì)心和腳掌軌跡:

其中,fitnessatti反映了機器人在整個行走過程的穩(wěn)定性,fitnessdis代表在一次行走中機器人行走的最遠距離.
本次實驗中NSGA-II 的種群規(guī)模為50,最大優(yōu)化代數(shù)為200.優(yōu)化初期,NAO 在上坡的時候很容易摔倒,經(jīng)過約40 代的時候,NAO 可以在坡面實現(xiàn)穩(wěn)定的行走,行走軌跡有可能會偏離直線.圖11為進化到180 代的結果,圖中標記的點是選擇的最優(yōu)解.表1 中顯示了對應的參數(shù),這些參數(shù)在實驗中均保持相同.
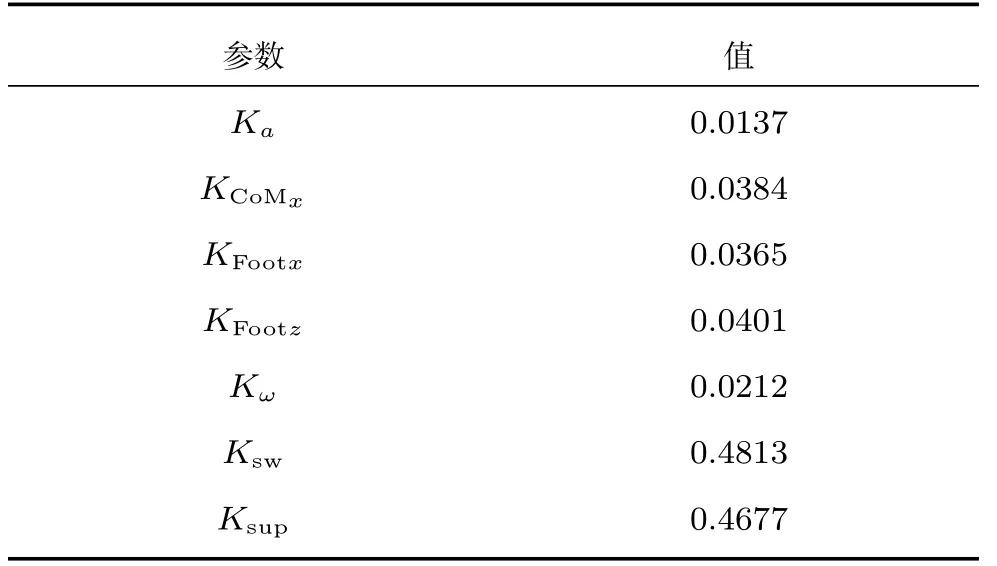
表1 最優(yōu)參數(shù)集Table 1 Optimal parameters set

圖11 迭代180 次Pareto 前沿面Fig.11 Pareto front of generation 180
3.3 坡面行走
3.3.1 固定坡度坡面行走仿真
仿真實驗持續(xù)83 s,圖12 表示在實驗過程中身體姿態(tài)角pitch 和roll.圖13(a)表明引入身體姿態(tài)作為反饋,質(zhì)心的位置可以在線調(diào)制,當走上坡時,CoMx沿斜面向前移動,反之,下坡時質(zhì)心向后移動.圖13(b)所示為腳掌軌跡在線生成的x-z平面軌跡,邁步的高度和長度也根據(jù)坡面適應性調(diào)整,當上坡時,高度和長度根據(jù)反饋信息相應減少防止滑動,反之下坡時相應增加,防止傾覆.圖14 是機器人坡面行走時ZMP 的分布情況,其中實線方框代表機器人腳部支撐區(qū)域,虛線代表ZMP,整個實驗過程ZMP 均保持在機器人的支撐區(qū)域內(nèi).圖15 是仿真實驗過程的截圖.
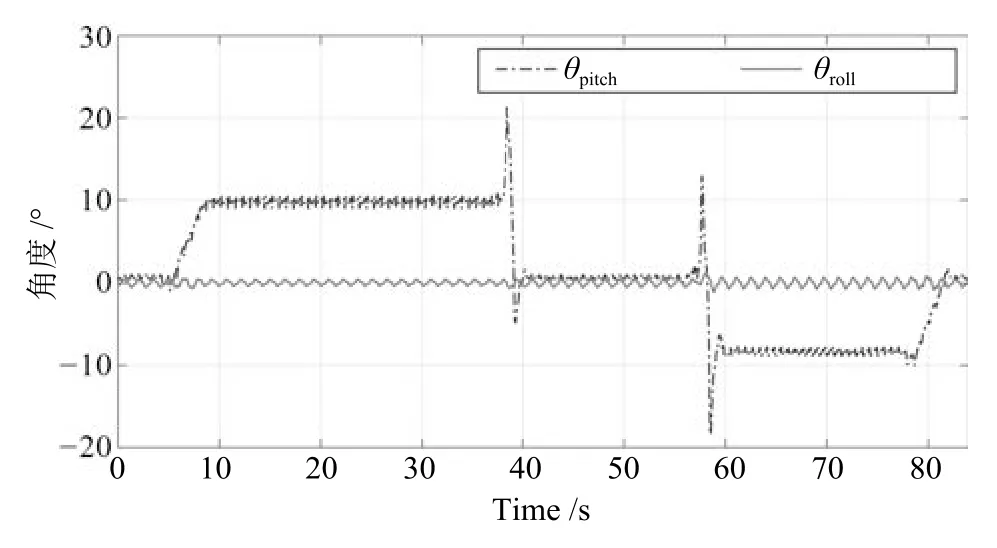
圖12 身體姿態(tài)角變化Fig.12 The body attitude angle
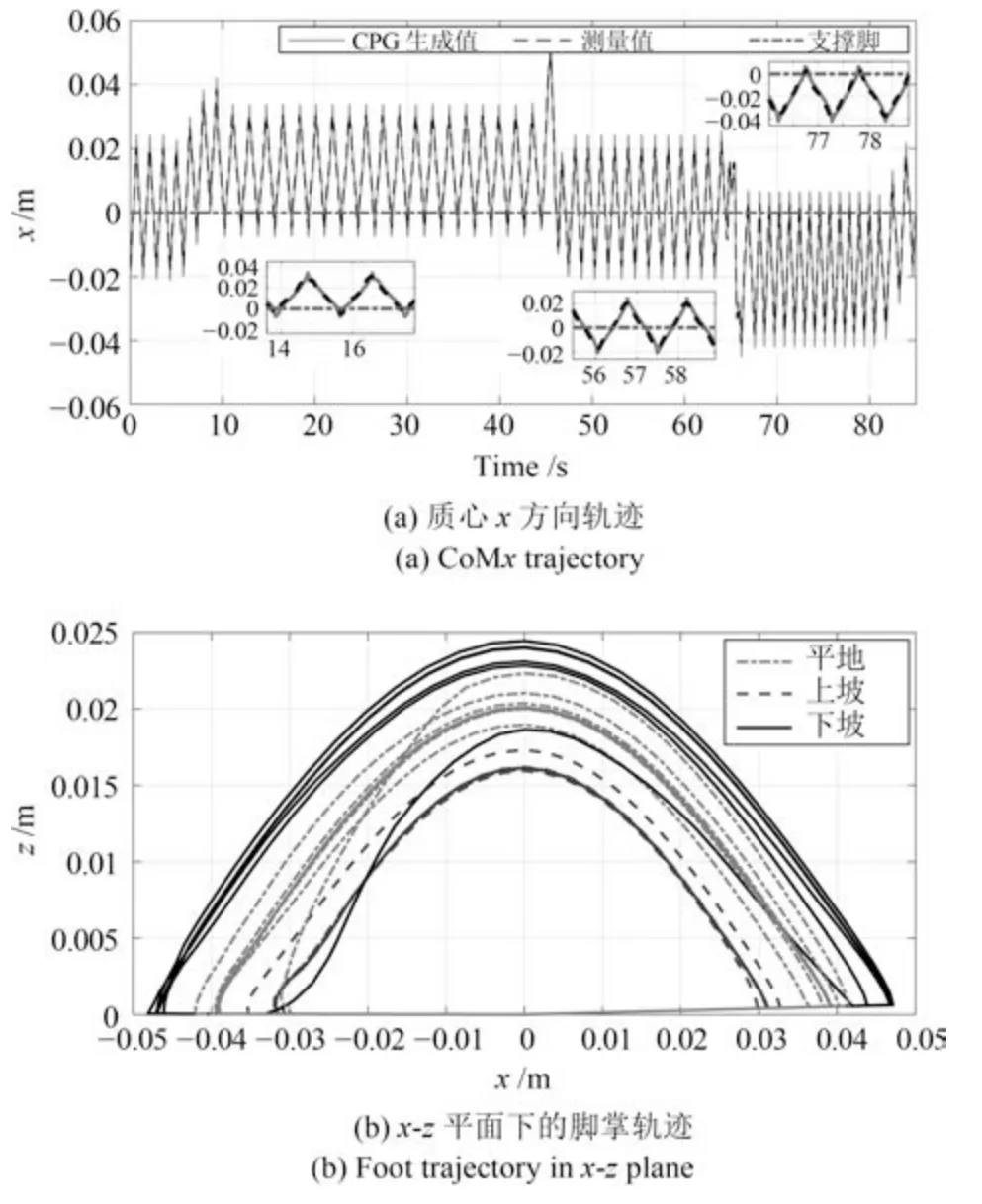
圖13 自學習CPG 在線生成的質(zhì)心CoMx 和腳掌軌跡Fig.13 Online generated CoMx and foot trajectory by SL-CPG

圖14 ZMP 分布Fig.14 ZMP distribution
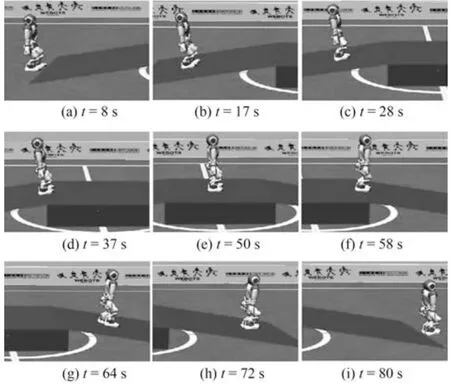
圖15 坡面行走仿真截圖Fig.15 Snapshots of d slope terrain adaptive walking simulation experiment
3.3.2 變坡度坡面行走仿真
本文設計的第二組實驗是坡度連續(xù)增加的坡面,坡面從從左至右坡度依次是4°,6°,8°,10°和12°.自學習CPG 質(zhì)心和腳掌軌跡發(fā)生器能根據(jù)坡面變化在線生成具有適應性的軌跡.圖16 表示在坡度逐漸增加的坡面上身體姿態(tài)角的變化,圖17 是整個實驗過程的截圖.
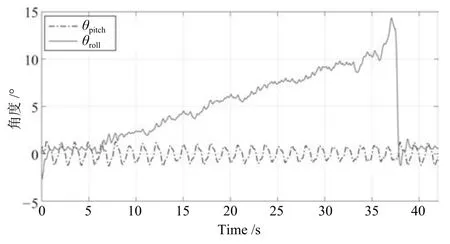
圖16 身體姿態(tài)角變化Fig.16 The body attitude angle
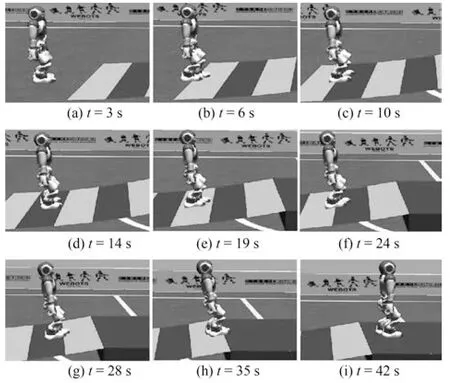
圖17 變坡度坡面仿真實驗截圖Fig.17 Snapshots of walking on varying slope
3.3.3 與關節(jié)空間法對比分析
基于關節(jié)空間法,在機器人行走時,每一個自由度都需要一個CPG 單元來控制,需要10 個CPG單元進行學習,其結構如圖18所示.
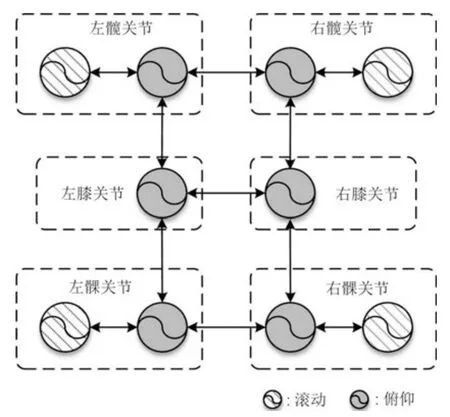
圖18 CPG 網(wǎng)絡結構圖Fig.18 Network structure of CPG
CPG 關節(jié)空間法成功實現(xiàn)了機器人平地的行走,圖19 是機器人平地行走時CPG 所產(chǎn)生的左腿的關節(jié)控制信號.
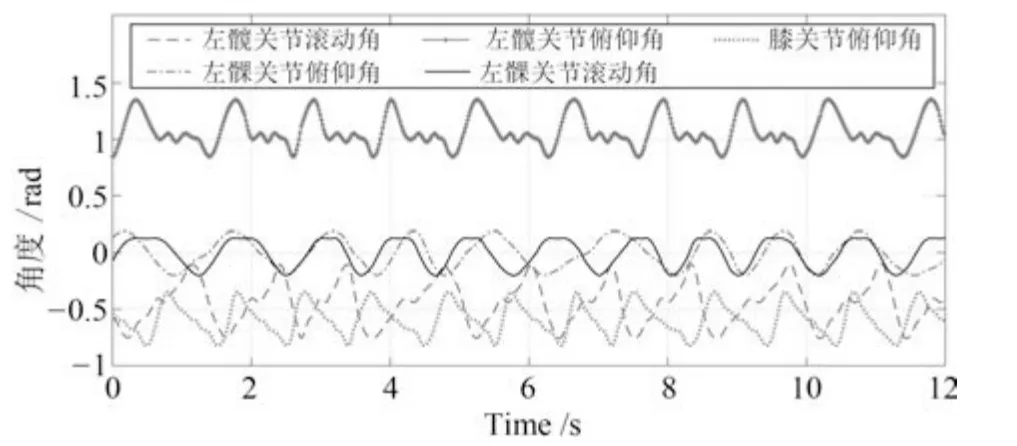
圖19 左腿關節(jié)控制信號Fig.19 Control signals of left leg joints
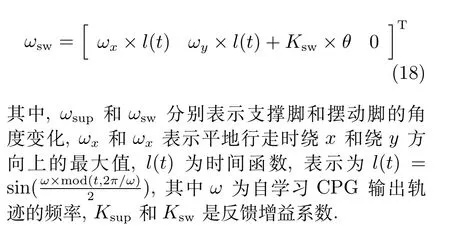
在坡面自適應行走實驗中,實驗環(huán)境設置保持一致,反饋的設置和CPG 工作空間方法中相似:

其中,kαDoFi和kω分別表示第i(i= 1,2,···,10)個自由度的SL-CPG 單元的幅值和頻率調(diào)節(jié)系數(shù),KDOFi和Kω為反饋增益系數(shù),和為反饋調(diào)節(jié)后的更新系數(shù).
在坡面自適應實驗中,CPG 關節(jié)空間法未能成功完成實驗,在NSGA-II 優(yōu)化算法結束后,機器人仍然無法在坡面上實現(xiàn)穩(wěn)定的自適應行走.在關節(jié)空間法中,機器人的質(zhì)心變化是不可預測的,會導致非正常的步態(tài)產(chǎn)生,而且在平地行走中機器人的搖晃程度更大.相比較于關節(jié)空間法,本文所提出的工作空間法,控制網(wǎng)絡更為簡單有效,所需CPG 單元和參數(shù)較少;控制機器人的質(zhì)心軌跡,有效防止機器人滑倒和傾覆,實現(xiàn)了機器人的自適應行走.
3.3.4 實體機器人實驗
基于Webots 中的仿真結果,將程序移植到NAO 實體機器人中,測試其行走性能.由于在Webots 中沒有絕對準確的動力學模型,而且仿真和實際行走時的摩擦系數(shù)不同以及實際機器人存在損耗,所以所設計的反饋回路的參數(shù)需要在相對小的范圍內(nèi)通過試驗和誤差來調(diào)制.
在本次試驗中,機器人依次連續(xù)通過三個不同的地形:上坡,平地和下坡,其中上下坡的坡度均為7°左右.機器人在未知地形情況下,自學習CPG 基于機器人自身的身體姿態(tài)來自動在線調(diào)整質(zhì)心和腳掌的軌跡,實現(xiàn)適應性行走.圖20 是實驗的截圖,圖21 是自學習CPG 在線生成的質(zhì)心和腳掌軌跡;圖22 是機器人行走過程中ZMP 的分布情況,其中實線代表腳掌多邊形,虛線是ZMP 分布.
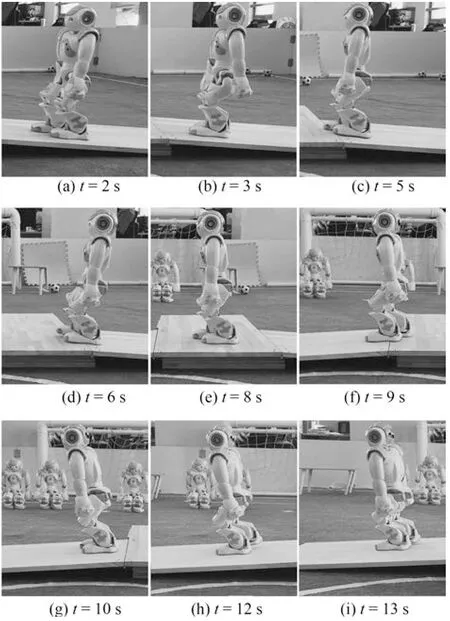
圖20 適應性行走實驗截圖Fig.20 Snapshots of adaptive walking experiment
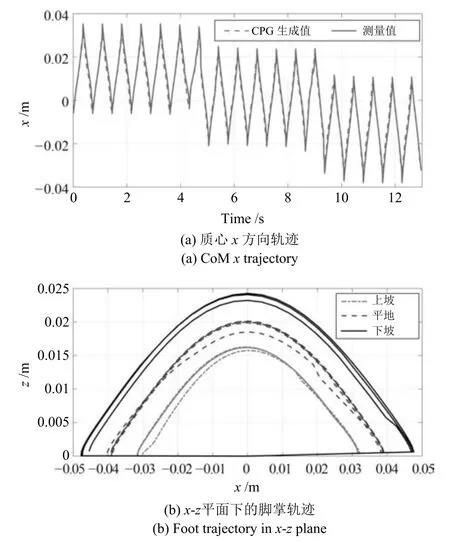
圖21 自學習CPG 在線生成的質(zhì)心CoMx 和腳掌軌跡Fig.21 Online generated CoMx and foot trajectory by SL-CPG
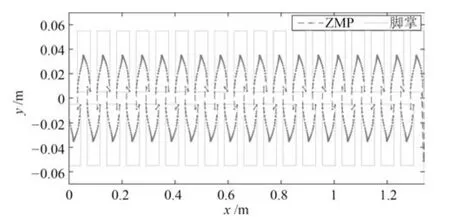
圖22 ZMP 分布Fig.22 ZMP distribution
4 結束語
本文采用了4 個自學習CPG 單元分別對機器人的工作空間軌跡訓練學習,得到質(zhì)心和腳掌的在線軌跡發(fā)生器.自學習CPG 工作空間規(guī)劃方法,可以從機器人現(xiàn)有軌跡或人類的行走步態(tài)中學習,并模仿人類的前庭反射,通過設計多個反饋回路來防止機器人發(fā)生打滑和傾覆.仿真和實體實驗以及與傳統(tǒng)關節(jié)空間法的對照實驗,驗證了所采用基于自學習CPG 的軌跡學習和生成方法以及自適應行走控制策略的有效性.本文提出的SL-CPG 模型和工作空間軌跡生成方法對足式機器人具有普適性.下一步將研究反饋控制器的設計以及基于強化學習的參數(shù)進化算法,并結合環(huán)境信息實現(xiàn)更為復雜地形及未知外部擾動下的自適應行走控制.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
光學精密工程(2016年6期)2016-11-07 09:07:19
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
核科學與工程(2015年4期)2015-09-26 11:59:03