一種新型海氣多參數(shù)測量浮標(biāo)數(shù)據(jù)采集系統(tǒng)
2021-11-11 07:08:18孫寶楠梁冠輝丁軍航
海洋科學(xué)進(jìn)展 2021年4期
關(guān)鍵詞:系統(tǒng)
王 斌,孫寶楠 ,梁冠輝,官 晟*,丁軍航
(1.青島大學(xué) 自動(dòng)化學(xué)院,山東 青島 266071;2.自然資源部 第一海洋研究所,山東 青島 266061;3.青島海洋科學(xué)與技術(shù)試點(diǎn)國家實(shí)驗(yàn)室 區(qū)域海洋動(dòng)力學(xué)與數(shù)值模擬功能實(shí)驗(yàn)室,山東 青島 266237;4.自然資源部 海洋環(huán)境科學(xué)與數(shù)值模擬重點(diǎn)實(shí)驗(yàn)室,山東 青島 266061;5.山東省工業(yè)控制技術(shù)重點(diǎn)實(shí)驗(yàn)室,山東 青島 266071)
海洋監(jiān)測是海洋科學(xué)研究的重要組成部分。通過對海洋氣象和水文數(shù)據(jù)的監(jiān)測,人們能夠及時(shí)地了解到海洋的環(huán)境變化,并為海洋科學(xué)研究、海洋災(zāi)害預(yù)警和海洋資源開發(fā)提供實(shí)用資料。海洋觀測浮標(biāo)作為廣泛應(yīng)用于海洋監(jiān)測的自主監(jiān)測平臺(tái),可通過錨定在海洋某一特定位置,利用其搭載的各種傳感器對海洋氣象水文諸多要素進(jìn)行測量、處理、存儲(chǔ)和通信[1-2]。
海洋觀測浮標(biāo)作為一種現(xiàn)代化海洋監(jiān)測技術(shù),正受到世界諸多國家的重視與研究。發(fā)達(dá)國家的海洋監(jiān)測研究起步較早,開始于20世紀(jì)30年代末,并一直處于領(lǐng)先水平。最具代表性的是美國國家海洋和大氣管理局(National Oceanic and Atmospheric Administration,NOAA)研制的浮標(biāo),其終端設(shè)備技術(shù)先進(jìn),功能齊全,大部分都已經(jīng)處于長期業(yè)務(wù)化運(yùn)行階段,而且具有高觀測精度、長期穩(wěn)定性、功能齊全和低功耗等特點(diǎn)[3]。海洋觀測浮標(biāo)的觀測范圍已經(jīng)擴(kuò)展到深遠(yuǎn)海,組成了業(yè)務(wù)化的觀測網(wǎng),并且向著全球高密度布網(wǎng)發(fā)展[4];我國在20世紀(jì)60年代正式將海洋浮標(biāo)納入國家發(fā)展規(guī)劃,之后也研制出了各種適用于不同海域的觀測浮標(biāo)及其裝備,覆蓋了我國各海域。但就總體發(fā)展程度而言,目前我國海洋監(jiān)測技術(shù)和網(wǎng)絡(luò)建設(shè)并不完善,在搭載的儀器設(shè)備的性能、測量精度和工作可靠性等方面,與國外還有較大的差距,這已成為制約我國海洋科技發(fā)展的重要因素之一[5]。
我國是一個(gè)海洋大國,發(fā)展海洋事業(yè)不僅對我國經(jīng)濟(jì)、社會(huì)發(fā)展影響巨大,而且對國土安全和國家權(quán)益的保障具有極其重要的意義。近年來我國海洋監(jiān)測技術(shù)不斷地發(fā)展,科技創(chuàng)新能力顯著提升,基本能夠滿足沿海海域業(yè)務(wù)化運(yùn)行的需求。但是,隨著海洋環(huán)境監(jiān)測要素的增多,數(shù)據(jù)處理復(fù)雜性加大,海洋監(jiān)測系統(tǒng)也要應(yīng)對越來越多的數(shù)據(jù)和復(fù)雜功能。因此,綜合各國海洋關(guān)注度的日益增加以及我國建設(shè)海洋強(qiáng)國戰(zhàn)略目標(biāo)的實(shí)施,我們必須自主研發(fā)出具有穩(wěn)定可靠、多參數(shù)、多功能的綜合海洋浮標(biāo)數(shù)據(jù)采集監(jiān)測系統(tǒng)。
本文的主要研究內(nèi)容是設(shè)計(jì)一種新型海氣多參數(shù)測量浮標(biāo)數(shù)據(jù)采集系統(tǒng)。通過構(gòu)建數(shù)據(jù)采集系統(tǒng),以獲取海洋環(huán)境監(jiān)測數(shù)據(jù),并利用衛(wèi)星通信傳輸至地面接收端。除此之外,實(shí)現(xiàn)了系統(tǒng)的低功耗設(shè)計(jì)方案,并對系統(tǒng)進(jìn)行相關(guān)聯(lián)調(diào)測試,以達(dá)到對海洋環(huán)境進(jìn)行多參數(shù)長期監(jiān)測的目的。
1 數(shù)據(jù)采集系統(tǒng)硬件設(shè)計(jì)
1.1 海洋資料浮標(biāo)數(shù)據(jù)采集系統(tǒng)概述
數(shù)據(jù)采集是浮標(biāo)系統(tǒng)的核心模塊,由搭載傳感器、電源系統(tǒng)、控制系統(tǒng)和通信系統(tǒng)組成,主要具有數(shù)據(jù)采集、處理、存儲(chǔ)、傳輸和過程控制等功能。浮標(biāo)錨定于海洋中,通過太陽能供電,由數(shù)據(jù)采集系統(tǒng)根據(jù)系統(tǒng)工作時(shí)序,控制采集單元及各項(xiàng)傳感器的加斷電來采集傳感器的輸出信號(hào),將其轉(zhuǎn)為數(shù)字信號(hào)并進(jìn)行相關(guān)處理,之后,存入存儲(chǔ)單元并通過通信模塊與衛(wèi)星進(jìn)行實(shí)時(shí)傳輸,傳送給岸基接收中心進(jìn)行后續(xù)的數(shù)據(jù)分析與處理[6]。系統(tǒng)組成框圖如圖1所示。
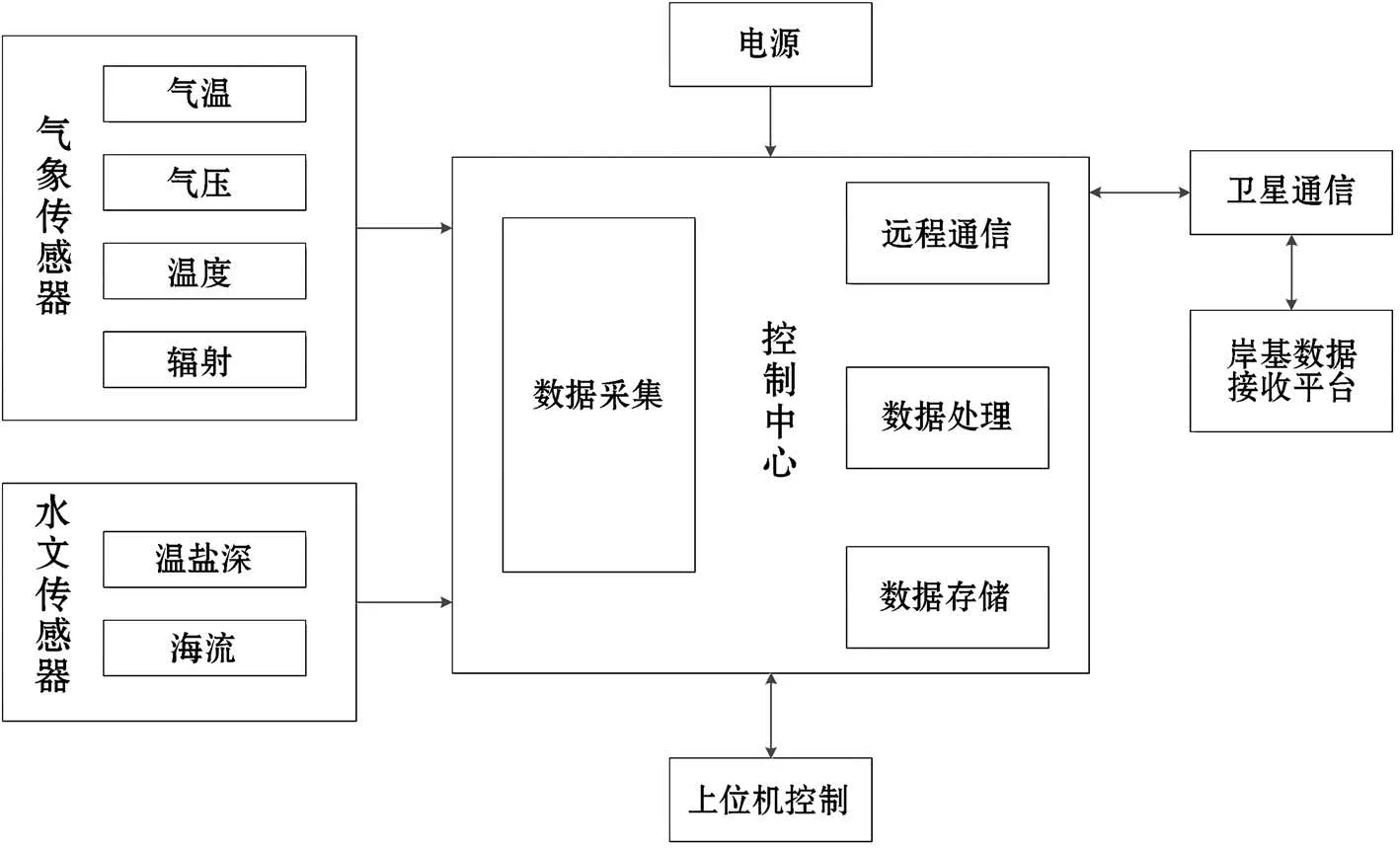
圖1 海洋資料浮標(biāo)采集系統(tǒng)組成Fig.1 Composition of the acquisition system of marine buoy data
1.2 傳感器選型與安裝布放優(yōu)化
若要實(shí)現(xiàn)數(shù)據(jù)采集系統(tǒng),首先,需要了解需要采集的參數(shù)指標(biāo),根據(jù)參數(shù)選擇對應(yīng)的傳感器種類以及傳感器接口;然后,根據(jù)傳感器的測量環(huán)境要求,為傳感器設(shè)置便于測量和安裝的布放位置;最后,利用數(shù)值模擬軟件對風(fēng)力、水力等進(jìn)行仿真計(jì)算,測試傳感器在惡劣環(huán)境干擾下是否能正常運(yùn)作,若無法采集數(shù)據(jù)或數(shù)據(jù)異常,則對工作異常的傳感器進(jìn)行硬件及安裝位置的分析,查找問題并進(jìn)行安裝優(yōu)化。浮標(biāo)傳感器選型布放測試流程如圖2所示。

圖2 傳感器集成方案設(shè)計(jì)流程Fig.2 Flow chart of the design for sensor integration
觀測浮標(biāo)采集的主要參數(shù)有氣溫、氣壓、濕度、風(fēng)速、風(fēng)向和輻射等氣象參數(shù)以及溫度、鹽度、深度和海流等水文參數(shù)。氣象傳感器采用鉑電阻RTD 進(jìn)行氣溫的測量,其精度高且相對穩(wěn)定,不會(huì)因高低溫引起物理或化學(xué)特性的變化;采用超聲風(fēng)傳感器測量各個(gè)方向的風(fēng)速分量,并通過合成得到風(fēng)速風(fēng)向,同時(shí)配合激光測風(fēng)儀測量激光雷達(dá)垂向中軸線方向上不同高度的風(fēng)速;氣壓采用硅諧振式氣壓傳感器測量,其不受被測流體密度的影響,通過固有振蕩頻率的變化來測得氣壓的大小;采用精度高、響應(yīng)速度快的激光傳感器測量相對濕度,彌補(bǔ)了傳統(tǒng)濕度傳感器易受環(huán)境影響的缺陷;輻射測量方面采用速度快、檢測精準(zhǔn)的熱電式太陽能輻射表,利用內(nèi)置感光元件對太陽總輻射進(jìn)行測量[7]。
水文傳感器選用定點(diǎn)式溫鹽深傳感器CTD測量水下溫度、電導(dǎo)率和壓力,通過計(jì)算得出剖面鹽度值,并用聲學(xué)海流計(jì)進(jìn)行海流數(shù)據(jù)的測量。因水下數(shù)據(jù)傳輸距離較長,最深可到1 000 m,考慮到實(shí)時(shí)性、水密性以及價(jià)格因素,本文采用了感應(yīng)耦合傳輸技術(shù)[8],通過包塑鋼纜進(jìn)行數(shù)據(jù)傳輸,鋼纜一端裸露在海水中與海水形成閉合回路,水下傳感器獲得數(shù)據(jù)后,通過鋼纜回路產(chǎn)生的感應(yīng)電流傳送至水上,并利用串口輸送給數(shù)據(jù)采集單元。
氣象傳感器由于數(shù)量較多,輸出信號(hào)類型和強(qiáng)度各不相同,采集單元處理起來較為不便,因此選擇一種通用的傳感器數(shù)據(jù)通訊接口,方便系統(tǒng)的集成。氣象傳感器統(tǒng)一選用標(biāo)準(zhǔn)RS485接口,組成RS485總線網(wǎng)絡(luò)進(jìn)行數(shù)據(jù)傳輸。RS485總線是一種異步半雙工通訊方式,能進(jìn)行多點(diǎn)數(shù)據(jù)的采集,相比RS232總線,其優(yōu)點(diǎn)是采用平衡發(fā)送和差分接收、傳輸速率更快、抗干擾性更強(qiáng)、安裝方便、便于維護(hù)[9]。所選傳感器及相關(guān)參數(shù)如表1所示。
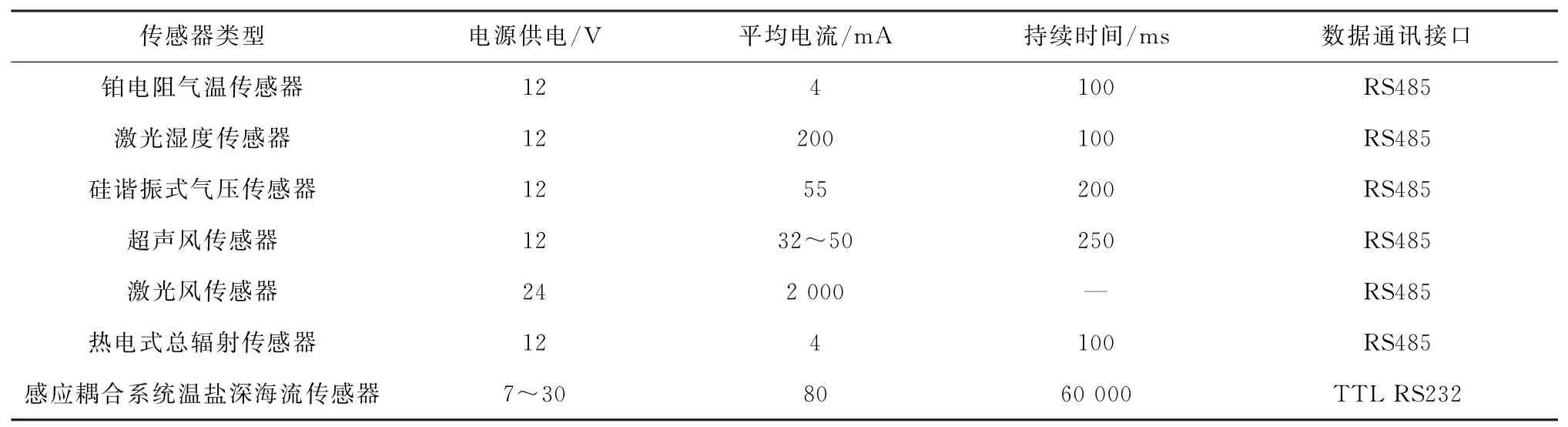
表1 浮標(biāo)平臺(tái)傳感器電氣特性Table 1 Electrical characteristics of sensors
由于搭載的傳感器設(shè)備較多,浮標(biāo)塔架平臺(tái)面積有限,設(shè)計(jì)塔架具有兩層安裝平臺(tái)(圖3),超聲測風(fēng)、激光測風(fēng)、太陽輻射需要防止遮擋,因此放置在第一層,其中激光測風(fēng)需要一個(gè)廣闊的開角,因此將其置于中間位置,其他的分散在四周,以減小各個(gè)傳感器之間的相互影響,同時(shí)在第一層搭配避雷針和角反射器保證安全性;溫度、濕度傳感器等不怕遮擋的設(shè)備置于第二層。該安裝布放方法既能充分利用塔架空間,又能保證各個(gè)傳感器都具有安全和開闊的測量環(huán)境,極大地提高了采集系統(tǒng)的穩(wěn)定性。
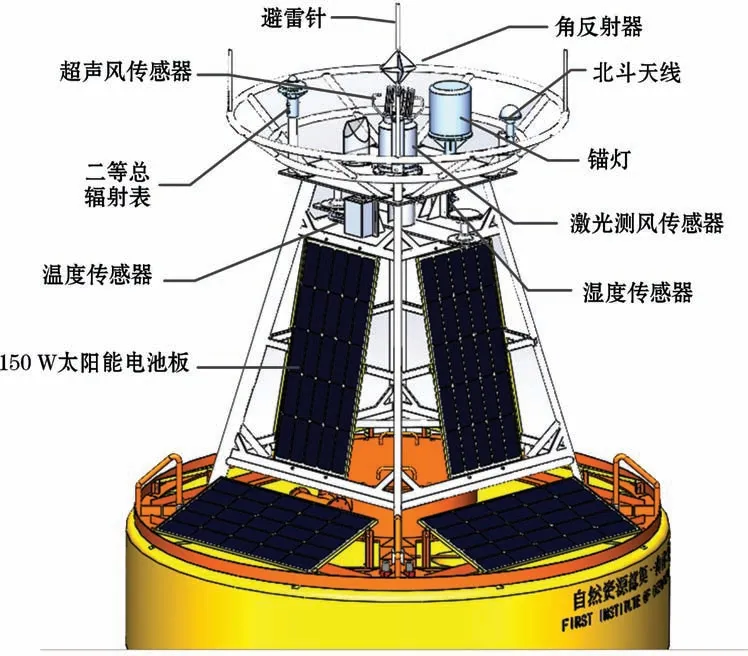
圖3 浮體塔架設(shè)備安裝布局Fig.3 Layout on buoy tower
1.3 遠(yuǎn)程通信模塊選型安裝與通信流程
浮標(biāo)傳感器所測得的所有數(shù)據(jù)都需要定時(shí)發(fā)送到岸站系統(tǒng),這就需要專門的衛(wèi)星通信系統(tǒng)對其進(jìn)行數(shù)據(jù)傳輸。遠(yuǎn)程通信系統(tǒng)通常采用GPRS、CD-MA 和北斗衛(wèi)星等通信方式,將數(shù)據(jù)采集系統(tǒng)獲取的數(shù)據(jù)傳送至岸基接收站。
北斗衛(wèi)星導(dǎo)航系統(tǒng)(BeiDou Navigation Satellite System,BDS)是我國自主研發(fā)的定位通訊系統(tǒng),隨著北斗技術(shù)的不斷發(fā)展,衛(wèi)星覆蓋海區(qū)逐漸擴(kuò)大,天線結(jié)構(gòu)安全可靠性增強(qiáng),數(shù)據(jù)傳輸也更加安全穩(wěn)定[10]。為支持國家北斗發(fā)展戰(zhàn)略,本文采用一套北斗通訊模塊,其具有標(biāo)準(zhǔn)的RS485數(shù)據(jù)接口,是采用模塊化一體式設(shè)計(jì)的,能夠滿足系統(tǒng)的數(shù)據(jù)傳輸要求。北斗通訊模塊安裝在浮標(biāo)塔架立桿頂部,采用密封防水方式,通過RS485接口與數(shù)據(jù)采集單元進(jìn)行傳輸。其中,北斗天線實(shí)物安裝照片如圖4所示。

圖4 北斗天線Fig.4 The Beidou antenna
海洋觀測浮標(biāo)通過配置此套北斗天線將傳感器測量數(shù)據(jù)上傳至北斗衛(wèi)星,北斗衛(wèi)星將上傳的數(shù)據(jù)發(fā)送至岸基數(shù)據(jù)接收中心,由接收中心再將接收到的觀測數(shù)據(jù)進(jìn)行進(jìn)一步的顯示、處理和入庫,并通過以太網(wǎng)送入特定的計(jì)算機(jī)網(wǎng)絡(luò)[11-12]。系統(tǒng)通信平臺(tái)架構(gòu)圖如圖5所示。
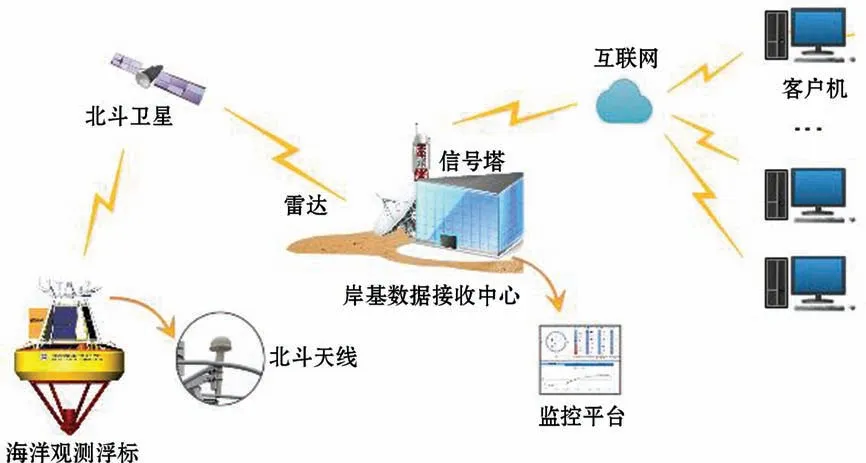
圖5 浮標(biāo)遠(yuǎn)程通信平臺(tái)架構(gòu)Fig.5 Platform of the buoy telecommunication system
1.4 控制模塊處理器選型與功能設(shè)計(jì)
控制模塊是采集系統(tǒng)的大腦,在整個(gè)采集過程中起著至關(guān)重要的作用,其主要功能為:①根據(jù)相應(yīng)時(shí)序和系統(tǒng)工作參數(shù),對系統(tǒng)中的所有設(shè)備進(jìn)行加斷電控制;②通過串口電路實(shí)現(xiàn)與搭載的串口接口的傳感器進(jìn)行通信,定時(shí)采集傳感器數(shù)據(jù);③在采樣過程結(jié)束后,將處理后的數(shù)據(jù)存入系統(tǒng)的存儲(chǔ)器;④與北斗通信單元通信,將數(shù)據(jù)按要求進(jìn)行發(fā)送;⑤監(jiān)測傳感器以及電源電壓,以監(jiān)測系統(tǒng)工作狀態(tài);⑥當(dāng)浮標(biāo)遭到破壞時(shí)及時(shí)報(bào)警等。
控制模塊需要有中央處理器CPU,其主要功能是負(fù)責(zé)處理和運(yùn)算計(jì)算機(jī)內(nèi)部的所有數(shù)據(jù),是控制系統(tǒng)的核心。控制模塊原理圖與實(shí)物圖如圖6和圖7所示。本文按照模塊化、低功耗和高可靠的設(shè)計(jì)思想,綜合對比幾種常用處理器的技術(shù)特點(diǎn),最終選用STM32F407RCT6作為控制模塊。STM32F407RCT6是一種嵌入式-微控制器的集成電路,它有著極高的性能、較低的功耗、合理的價(jià)格以及強(qiáng)大的軟件支持,簡單易用。其相關(guān)參數(shù)為:32位,速度72 MHz,程序存儲(chǔ)器容量256 k B,程序存儲(chǔ)器類型為FLASH,RAM 容量48 k B。該處理器接口數(shù)量滿足需求,同時(shí)也能保證系統(tǒng)所需的低功耗要求[13-14]。
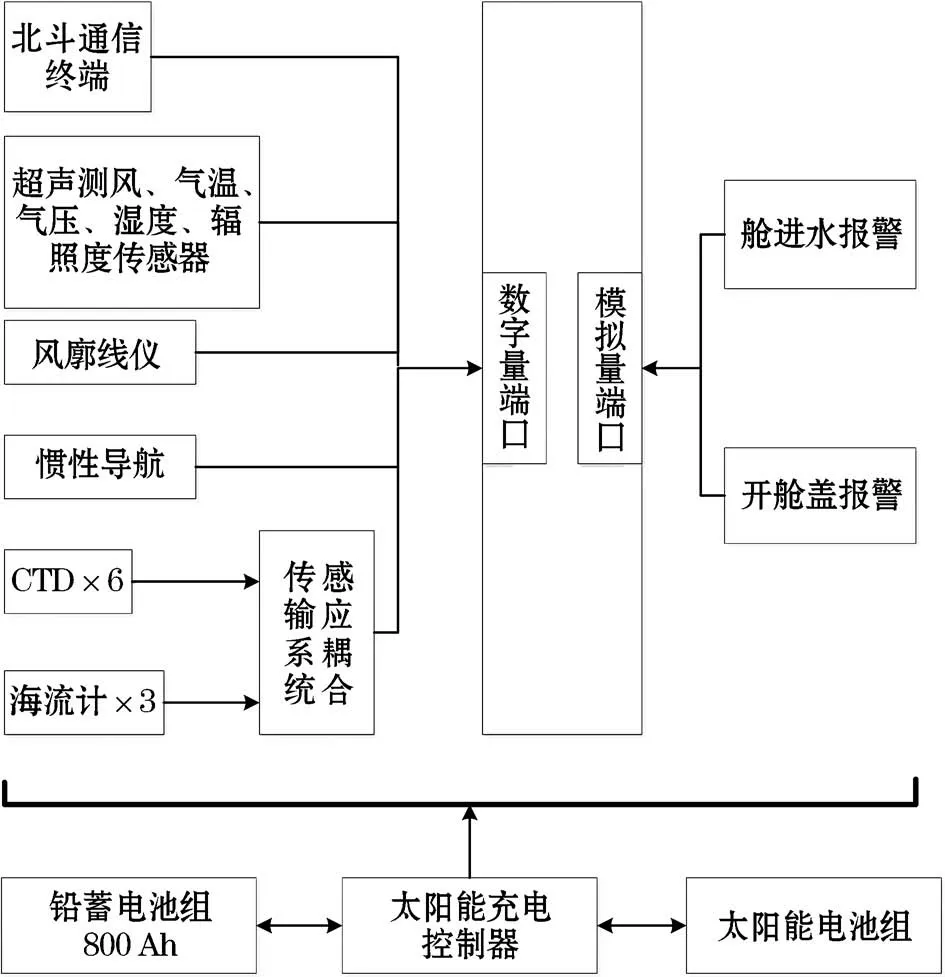
圖6 控制模塊原理Fig.6 Schematic diagram of the control module

圖7 控制模塊Fig.7 The control module
1.5 低功耗方案設(shè)計(jì)
浮標(biāo)服役于海洋,工作周期長,電力補(bǔ)充能力較弱,因此數(shù)據(jù)采集控制系統(tǒng)的低功耗是系統(tǒng)的基本要求。根據(jù)本浮標(biāo)實(shí)際工作需要,對本浮標(biāo)系統(tǒng)做耗能假設(shè):①正常工作模式下連續(xù)工作時(shí)間不小于1 a;②示范海域在南海北部,臺(tái)風(fēng)天氣會(huì)出現(xiàn)連續(xù)降水天氣,必須滿足在連續(xù)15 d無法充電情況下提供設(shè)備正常工作電能;③各傳感器(除測風(fēng)傳感器)每15 min采集一次數(shù)據(jù),開機(jī)后連續(xù)采樣1 min;④激光測風(fēng)雷達(dá)每15 min采集一次數(shù)據(jù),開機(jī)后連續(xù)采樣5~10 min;⑤超聲測風(fēng)傳感器,每15 min采集一次數(shù)據(jù),開機(jī)后連續(xù)采樣10 min;⑥所有傳感器在風(fēng)速大于20 m/s時(shí)做數(shù)據(jù)加密采集處理,連續(xù)采樣0.5 h;⑦衛(wèi)星通訊模塊每小時(shí)開啟一次,持續(xù)傳輸數(shù)據(jù)15 min。
根據(jù)上述的耗能假設(shè),本文采用如下低功耗方案:
①充分利用STM32F407RCT6提供的低功耗模式,在處理器完成主程序任務(wù)后,設(shè)置其進(jìn)入低功耗待機(jī)模式。
②對電源進(jìn)行有效管理,對于某時(shí)刻系統(tǒng)內(nèi)暫不工作的部分,使其斷電或處于降耗狀態(tài)。如當(dāng)采集數(shù)據(jù)時(shí),只讓電源模塊和采集處理模塊工作,通信模塊暫不工作。在采集結(jié)束后,通信模塊再開啟,對數(shù)據(jù)進(jìn)行傳輸。
③在滿足系統(tǒng)性能要求的基礎(chǔ)上,盡可能地選擇功耗較低的電子設(shè)備,降低功耗,延長電池工作時(shí)間。
本文所選設(shè)備以及功耗情況統(tǒng)計(jì)如表2所示。若要保證采集系統(tǒng)能在陰雨惡劣天氣無法充電的情況下連續(xù)15 d正常工作,根據(jù)設(shè)備總體功耗,采用8塊24V/125W 的太陽能電池板進(jìn)行充電,采用4節(jié)250 Ah鉛酸電池儲(chǔ)能,其充放電性能穩(wěn)定,價(jià)格較低,整體尺寸與重量相對較小,滿足系統(tǒng)的功耗要求[15-16]。
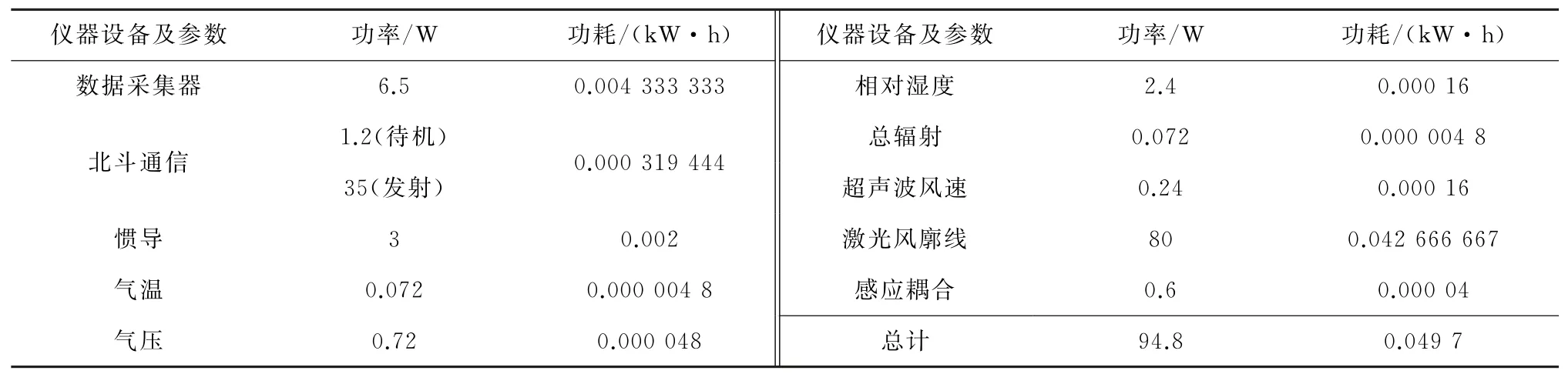
表2 儀器功率及功耗Table 2 Power and power consumption of instruments
2 數(shù)據(jù)采集系統(tǒng)軟件設(shè)計(jì)
軟件設(shè)計(jì)是浮標(biāo)數(shù)據(jù)采集控制的重要內(nèi)容,它控制著系統(tǒng)數(shù)據(jù)的采集過程、處理過程、發(fā)送過程和存儲(chǔ)過程等。本文軟件程序是基于Labview 圖形化編程語言在Windows XP Embedded系統(tǒng)進(jìn)行開發(fā)的,該系統(tǒng)建立于Windows XP Professional的基礎(chǔ)之上,具有與之相同的應(yīng)用程序編程模型,屬于精簡版的Windows XP系統(tǒng),利于軟件快速開發(fā);該系統(tǒng)還具有磁盤讀寫保護(hù)功能,可使浮標(biāo)在長期海洋工作中突遇斷電時(shí)系統(tǒng)不會(huì)崩潰,隨后系統(tǒng)能夠自動(dòng)重新開始觀測任務(wù)[17]。
2.1 數(shù)據(jù)采集控制程序設(shè)計(jì)
軟件的系統(tǒng)控制和數(shù)據(jù)采集流程如圖8所示。浮標(biāo)既要高速地采集大量數(shù)據(jù),又要對每次采集的數(shù)據(jù)進(jìn)行操作,若將采集數(shù)據(jù)和操作數(shù)據(jù)放在同一循環(huán)周期內(nèi),會(huì)降低數(shù)據(jù)采集效率,甚至導(dǎo)致端口緩存區(qū)內(nèi)的觀測數(shù)據(jù)可能未被及時(shí)讀取而被下一周期的觀測數(shù)據(jù)取代,進(jìn)而造成數(shù)據(jù)缺失。為了避免以上情況發(fā)生,開發(fā)軟件時(shí),采用了隊(duì)列操作模式,數(shù)據(jù)采集屬于入隊(duì)列循環(huán),操作數(shù)據(jù)屬于出隊(duì)列循環(huán),二者獨(dú)立運(yùn)行互不影響。
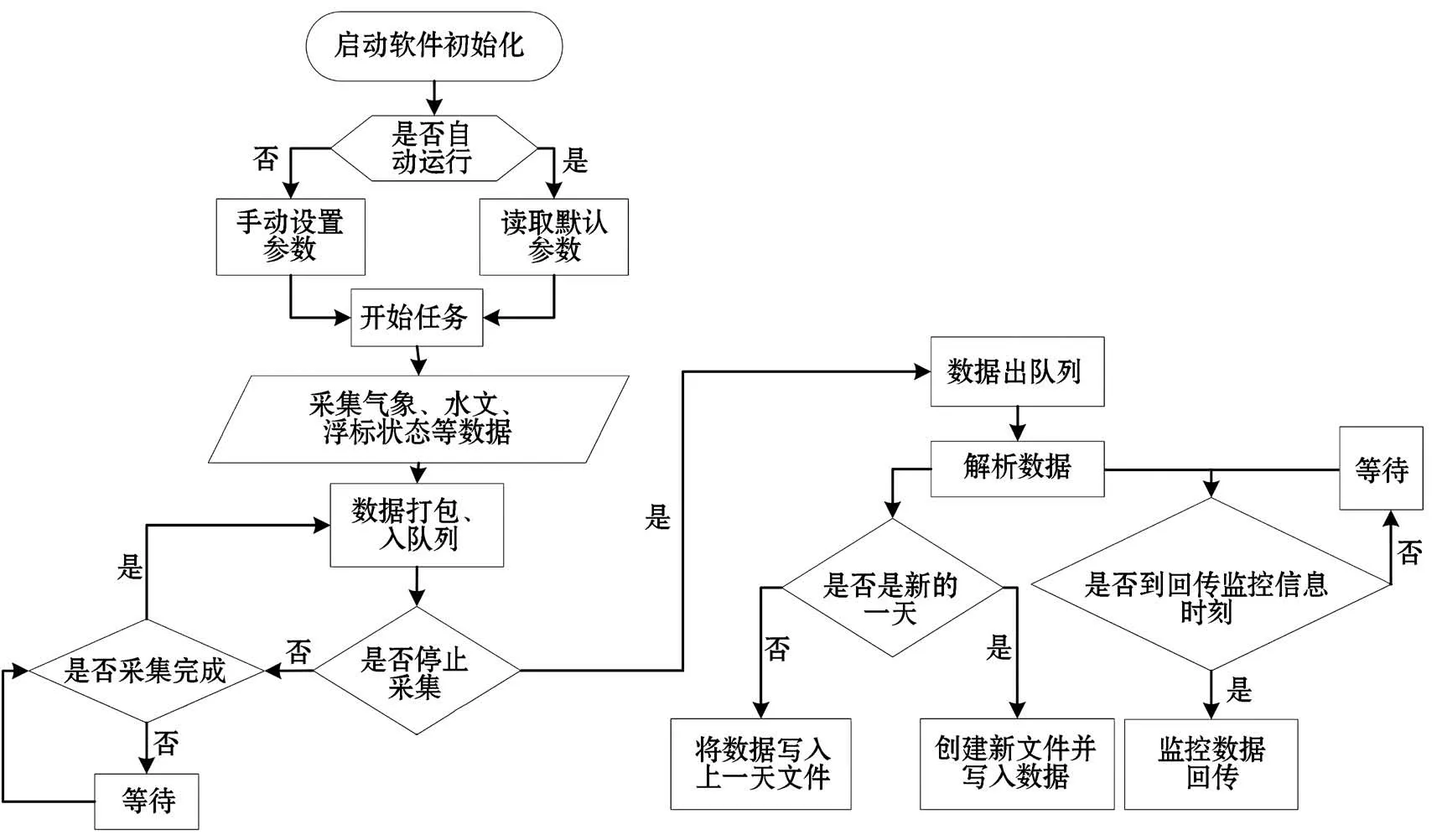
圖8 數(shù)據(jù)采集軟件流程Fig.8 Flow chart of the data acquisition software
觀測站軟件的主界面例如圖9所示。主界面包括控制參數(shù)設(shè)置窗口、狀態(tài)顯示窗口和錯(cuò)誤監(jiān)控窗口。通過控制參數(shù)設(shè)置窗口可對觀測站硬件工作參數(shù)進(jìn)行設(shè)置,包括各模塊端口號(hào)、端口速率、采集模式、通信地址、通信頻率和數(shù)據(jù)文件路徑等;通過狀態(tài)顯示窗口可以查看各個(gè)模塊的工作狀態(tài)、數(shù)據(jù)采集器的運(yùn)行狀態(tài)和通信狀態(tài)等;錯(cuò)誤監(jiān)控窗口的主要內(nèi)容是顯示軟件各個(gè)子模塊的運(yùn)行狀態(tài)。這些窗口可在調(diào)試系統(tǒng)時(shí)或者設(shè)備布放前進(jìn)行系統(tǒng)設(shè)置、查看運(yùn)行狀態(tài),以保證研制工作和測量任務(wù)順利進(jìn)行。該軟件界面簡潔易懂,操作方便,為用戶提供了便利。
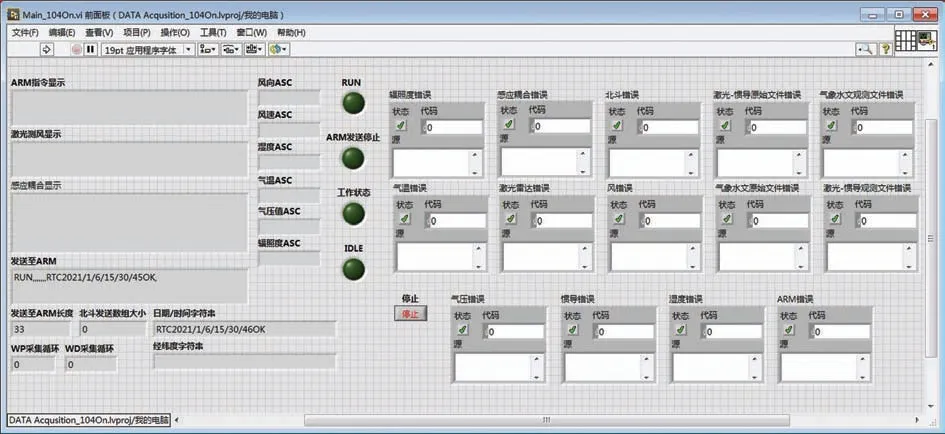
圖9 軟件主界面Fig.9 Main interface of the software
2.2 軟件時(shí)序及任務(wù)設(shè)計(jì)
根據(jù)不同的用戶需求,浮標(biāo)可采用3 h、1 h、0.5 h和10 min工作模式,以常用的1 h工作模式為例,浮標(biāo)數(shù)據(jù)采集控制系統(tǒng)工作時(shí)序如圖10所示。氣溫氣壓、風(fēng)速風(fēng)向、海流計(jì)、溫鹽等按照圖示進(jìn)行定時(shí)上電、采集和斷電。
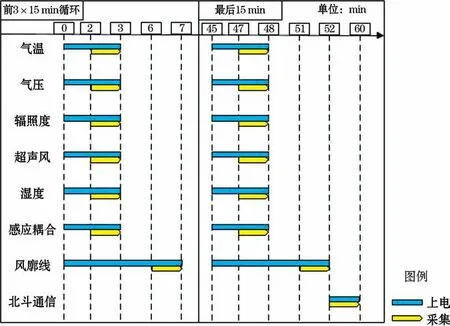
圖10 數(shù)據(jù)采集時(shí)序Fig.10 Sequence diagram of the data acquisition
3 數(shù)據(jù)采集系統(tǒng)實(shí)驗(yàn)測試
根據(jù)系統(tǒng)時(shí)序,浮標(biāo)數(shù)據(jù)采集軟件的任務(wù)組成主要包括風(fēng)速風(fēng)向采集任務(wù)、溫濕度采集任務(wù)、氣壓采集任務(wù)、海流采集任務(wù)、調(diào)試/顯示任務(wù)、衛(wèi)星通信任務(wù)、網(wǎng)絡(luò)通信任務(wù)、文件操作任務(wù)和時(shí)間調(diào)度任務(wù)等。因采用了實(shí)時(shí)操作系統(tǒng),做能保證各任務(wù)的實(shí)時(shí)性。
本文浮標(biāo)海上示范運(yùn)行擬選在某海域示范運(yùn)行時(shí)間不少于1 a,以補(bǔ)充我國海上監(jiān)測系統(tǒng)。在進(jìn)行現(xiàn)場示范之前,需要先進(jìn)行實(shí)驗(yàn)室實(shí)驗(yàn),模擬現(xiàn)場環(huán)境,檢驗(yàn)各部分設(shè)計(jì)制造的質(zhì)量、電子部分的性能與參數(shù)以及軟件的性能等,盡可能地提前發(fā)現(xiàn)問題、解決問題。實(shí)驗(yàn)測試總體流程如圖11所示。
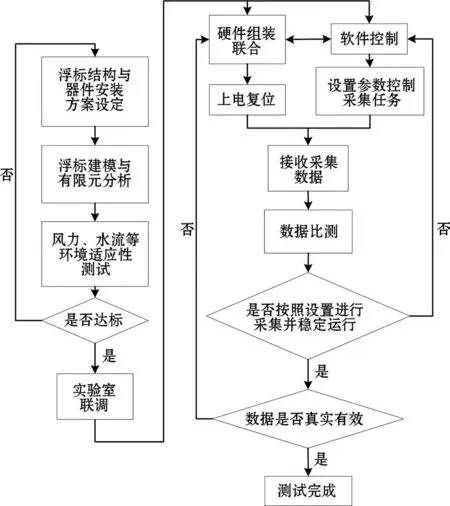
圖11 實(shí)驗(yàn)測試流程[18]Fig.11 Flow chart of experimental test[18]
為保證浮標(biāo)搭載器件安全穩(wěn)定運(yùn)行,浮標(biāo)體自身需要有良好的漂浮穩(wěn)定性,當(dāng)遇到相對惡劣的風(fēng)浪時(shí),能避免出現(xiàn)較大的搖晃、旋轉(zhuǎn)。本文通過仿真計(jì)算浮標(biāo)的靜穩(wěn)性曲線和動(dòng)穩(wěn)性曲線來確定浮標(biāo)的海上運(yùn)動(dòng)情況,2種曲線如圖12所示。
《國內(nèi)航行海船法定檢驗(yàn)技術(shù)規(guī)則》[19]中對于海洋浮體結(jié)構(gòu)的大傾角穩(wěn)性的要求為:橫傾角φ=30°處的復(fù)原力臂應(yīng)不小于0.2 m,最大復(fù)原力臂對應(yīng)的橫傾角應(yīng)不小于25°,穩(wěn)性消失角應(yīng)不小于55°。從圖12a可以得出,該浮標(biāo)的極限靜傾角約為41°,最大復(fù)原力臂約為0.58 m,穩(wěn)性消失角超過90°,完全滿足技術(shù)要求。由圖12b可知,浮標(biāo)的最小傾覆力臂為0.277 6 m。經(jīng)過計(jì)算可得,文中浮標(biāo)的風(fēng)壓傾斜力臂為0.220 9 m,進(jìn)而求得浮標(biāo)的穩(wěn)性衡準(zhǔn)數(shù)K=1.26,這滿足《船舶與海上設(shè)施法定檢驗(yàn)規(guī)則》[20]中要求浮體穩(wěn)性衡準(zhǔn)數(shù)大于等于1的要求。所以,該浮標(biāo)完全滿足技術(shù)規(guī)則的要求,具備足夠的靜穩(wěn)性與動(dòng)穩(wěn)性,即使在較為惡劣的海況下也能保持穩(wěn)定姿態(tài),確保了數(shù)據(jù)采集系統(tǒng)的各個(gè)器件能夠在安全穩(wěn)定的環(huán)境下運(yùn)行。
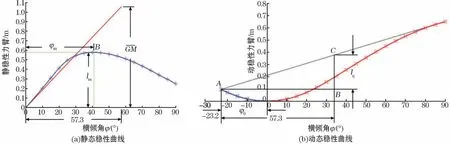
圖12 浮標(biāo)穩(wěn)性曲線[18]Fig.12 Buoy stability curve[18]
進(jìn)一步對采集系統(tǒng)傳感器以及供電進(jìn)行相關(guān)測試(表2)可知,在浮標(biāo)搭載的各個(gè)器件中,激光測風(fēng)儀功耗約占總功耗的85%,實(shí)驗(yàn)中對激光測風(fēng)儀進(jìn)行功耗測試,連接一塊12 V 250 Ah蓄電池,用升壓模塊升至24 V 進(jìn)行供電,實(shí)際測得穩(wěn)定電流約為2.5 A,由電池的放電曲線可知,在電流小于0.05 C(7.5 A)時(shí),可直接計(jì)算放電時(shí)長而不會(huì)達(dá)到電池欠壓值,因此通過計(jì)算得出一塊電池可供激光雷達(dá)持續(xù)運(yùn)行約100 h。激光雷達(dá)與電源測試現(xiàn)場實(shí)物如圖13和圖14所示。

圖13 激光測風(fēng)雷達(dá)Fig.13 Wind LIDAR

圖14 電源控制與升壓模塊Fig.14 Power supply and boost module
本系統(tǒng)使用8塊24 V/125 W 的太陽能電池板(圖15)對4塊蓄電池進(jìn)行充電,為方便實(shí)驗(yàn),本文使用了兩塊電池板并聯(lián),按照浮體安裝設(shè)計(jì)的角度置于陽關(guān)充足的地方,并對放電實(shí)驗(yàn)中已放電的單塊電池進(jìn)行充電,測得在光照充足時(shí)充電電流約為3 A。

圖15 太陽能電池板測試Fig.15 Solar panels test
激光雷達(dá)運(yùn)行模式為每隔15 min啟動(dòng)運(yùn)行5~10 min。當(dāng)出現(xiàn)陰雨天氣時(shí),若電池中剩余電量按70%計(jì)算,則4 塊250 Ah電池能為激光雷達(dá)提供420~560 h的工作時(shí)間;其他器件雖工作時(shí)間與功耗各不相同,但總體占比較小,經(jīng)過估算認(rèn)為該系統(tǒng)能滿足在陰雨天氣下持續(xù)運(yùn)行15 d的要求。
在進(jìn)行電源供電實(shí)驗(yàn)的同時(shí),也為激光雷達(dá)數(shù)據(jù)采集做了測試,獲得垂直方向上1 000 m 以下的風(fēng)速、風(fēng)向相關(guān)數(shù)據(jù),通過圖16所示軟件進(jìn)行圖形化顯示,證明了采集模塊能正常運(yùn)行并獲取到傳感器的測量數(shù)據(jù)。
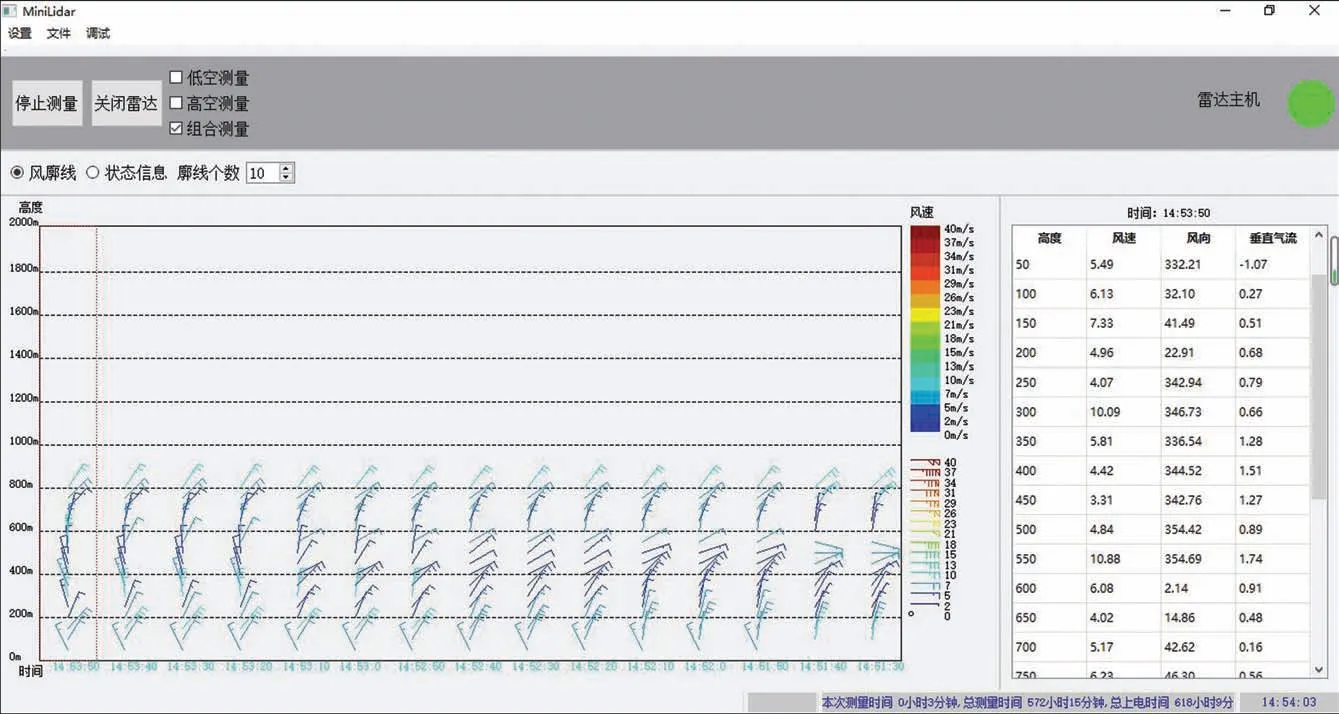
圖16 激光測風(fēng)數(shù)據(jù)圖形化顯示Fig.16 Graphical display of wind measurement by LIDAR
4 結(jié)語
本文針對自主研制的新型海氣多參數(shù)測量浮標(biāo),設(shè)計(jì)了集成激光測風(fēng)雷達(dá)等多種國產(chǎn)最新型海洋、大氣傳感器的數(shù)據(jù)采集系統(tǒng)。該系統(tǒng)對海氣觀測浮標(biāo)全國產(chǎn)替代技術(shù),進(jìn)行了有益的探索,積累了大量設(shè)計(jì)與制造經(jīng)驗(yàn)。
本文以滿足各傳感器工作條件為前提,論述了傳感器布設(shè)、電源供電、太陽能補(bǔ)充、多源多類數(shù)據(jù)接口、衛(wèi)星通信、主控模塊與控制軟件等功能單元的設(shè)計(jì)與實(shí)現(xiàn)方案。從選型與工作模式等多方面重點(diǎn)關(guān)注系統(tǒng)能耗優(yōu)化,實(shí)現(xiàn)連續(xù)工作1 a及在南海北部特定海洋環(huán)境下連續(xù)工作15 d無能源補(bǔ)充的低功耗目標(biāo)。此外,將傳感器布局設(shè)計(jì)與浮標(biāo)風(fēng)浪響應(yīng)仿真融入傳統(tǒng)數(shù)采系統(tǒng)設(shè)計(jì)流程中,保障了浮標(biāo)風(fēng)壓傾斜力臂、穩(wěn)性衡準(zhǔn)數(shù)等指標(biāo)符合相關(guān)檢測與設(shè)計(jì)規(guī)則要求,極大提高了數(shù)采系統(tǒng)設(shè)計(jì)結(jié)果的針對性與可靠性。理論計(jì)算、仿真實(shí)驗(yàn)與系泊實(shí)驗(yàn)結(jié)果,證實(shí)本文各項(xiàng)設(shè)計(jì)滿足了預(yù)定的設(shè)計(jì)目標(biāo)要求。后續(xù)將通過海上試驗(yàn),對各部分設(shè)計(jì)形成反饋,以進(jìn)一步提高其性能。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32