一種人體關節訓練機構的設計
2021-11-10 05:55:11田奕江孫淵金芏珺崔哲偉劉悅
科學與生活 2021年12期
關鍵詞:單片機
田奕江 孫淵 金芏珺 崔哲偉 劉悅
摘要:神經系統受到損傷后需要做康復治療。本文對一種可以代替醫師對患者進行康復訓練的機械進行研究。并通過單片機來實現腿部運動控制和系統保護機制功能。
關鍵詞:神經系統損傷;康復訓練;系統保護機制;腿部運動控制;單片機
1 選題背景及其意義
目前, 康復機器人與智能輔助系統已成為國內外機器人領域的研究熱點.最具影響力的機器人國際學術會議包括ICRA(IEEE International Conference on Robotics and Automation) 、IROS (IEEE/RSJ International Conference on Intelligent Robots and Systems) 等都設置專題對康復機器人與智能輔助系統進行研討;另外, IEEE機器人與自動化學會 (IEEE Robotics and Automation Society, RAS) 和醫學與生物工程學會(IEEE Engineering in Medicine and Biology Society, EMBS) 每兩年共同舉辦一次康復機器人國際會議 (IEEE International Conference on Rehabilitation Robotics, ICORR) , 康復機器人與智能輔助系統是其核心議題。
對于各種原因引起的中樞神經損傷導致的肢體殘障患者來說,其生存質量的高低取決于肢體功能恢復的程度。患者經過手術和藥物治療后,其運動功能的恢復主要依賴于各種康復運動療法[1]。如何運用現代先進康復治療技術,改善患者肢體運動功能,使患者在盡快擺脫病殘的折磨的同時,恢復其自主生活的能力,一直是康復工作者研究和實踐的重點。然而,上述的現狀表明,下肢癱患者人數眾多,康復師相對匱乏,傳統療法自動化水平低,效率差,進口康復設備價格又太高,所以研制人性化的智能康復機器人是一項重要而緊迫的任務,具有非常明顯的經濟效益和社會效益[2]。
2 研究內容
2.1 STM32程序控制基本工作原理
整個程序框架和內容分別包括兩部分。框架配合內容使整個裝置按照自己設想的方式運動。
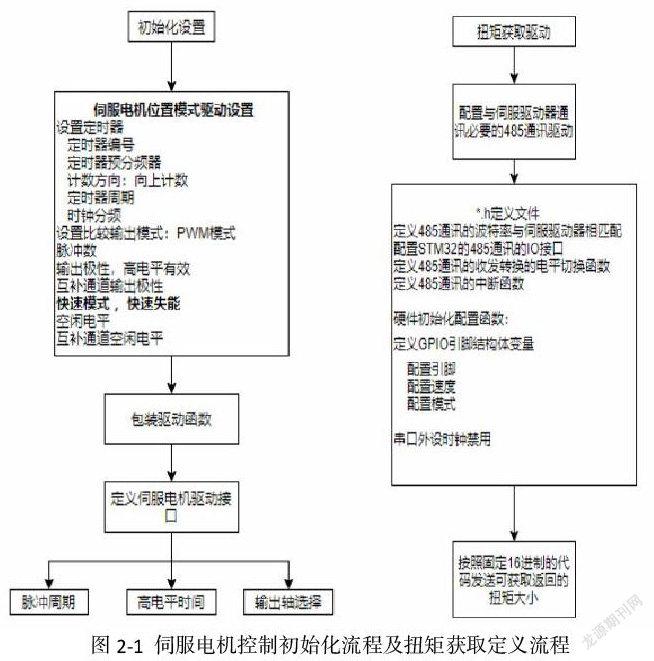
程序內容一部分是各個固件的驅動。如圖2-1需要設計到控制的元器件有伺服電機的控制,行程開關的檢測,伺服電機扭矩的反饋,屏幕收到用戶的按鍵信息后將信息發送給STM32。
伺服電機采用位置模式控制,通過脈沖的數量控制和發布脈沖的頻率來決定電機運動的速度和位置。在STM32控制系統中程序內容另一部分則是按照設定的規則,通過調用這些驅動獲取相應的信息或者去調用相應的動作。
程序框架則包括局部運動和整體聯合運動兩種控制方式。
2.2 腿部張合運動
通過雙向絲桿將兩個固定腳部部位聯系在一起,當電機控制絲桿轉動時,兩只腳會受到雙向絲桿的牽引實現張合運動。
2.3 腿部伸展與收縮運動
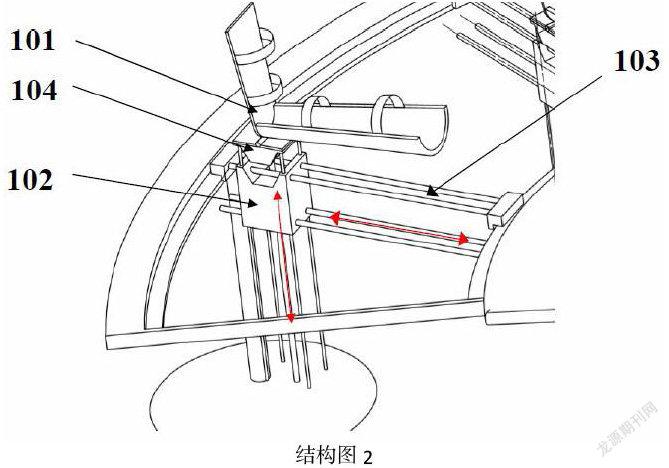
腳部關節(101)搭載著滑塊(102)隨著紅色箭頭方向,沿著滑道(103)運動,帶著腳部(101)前后運動,牽引著腿部關節的彎曲與伸展。同時兩側設立行程開關,避免機構出現超出行程的運動。另外此直線運動采用伺服電機驅動,時刻檢測負載扭矩,以防機械運動到患者無法承擔的位置導致劇烈疼痛與損傷。
2.4 腿部抬升與放下運動
腳部關節(101)隨著升降滑塊(104)沿著圖二中的紅線方向搭載著滑塊(102)移動,同時隨著升降滑塊(104)的上下移動,腳部關節(101)會相對于升降滑塊(104)進行轉動,以配合腿的移動。
2.5 腿部組合動作
腿部伸展運動和腳部抬升運動可以看作是腳部關節(101)沿著X軸和Y軸的運動。以此為基準我們就可以通過控制XY兩個方向的運動來控制人體的腳步的運動,就可以模仿走路的姿態,以及特定的康復動作。
3預期成果及創新點
本裝置對四肢每個動作的運動軌跡、運動強度、康復次數以及停頓時間進行規劃,相較于機械式的執行康復訓練可以使病人更快康復。針對不同患者設定私人康復方案,上位機的數據統計功能,通過和已經康復的患者的訓練次數進行對比,得出患者的康復進度。全機械自動輔助患者進行康復運動,減輕家屬負擔,同時避免了不正確的康復動作。四肢都將被機械控制完成指定的康復動作,控制手部彎曲、腿部彎曲和腰部扭轉運動、腿部張合、抬落,手臂的伸展等組合運動,減少由人力進行的輔助康復,節約資金,加快康復速度。
參考文獻:
[1]張通.中國腦卒中康復治療指南(2011完全版)[J].中國康復理論與實踐,2012,4(6):55-76.
[2]杜寧.基于3-RRC并聯機構的上肢康復機器人設計[D].秦皇島:燕山大學機械電子學科碩士學位論文,2012:1-2.
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36