多因素無人機傾斜攝影三維建模精度研究
2021-11-10 06:32:00王源呂揚李兵陳品祥韓雄
城市勘測 2021年5期
王源,呂揚,李兵,陳品祥,韓雄
(1.北京市測繪設計研究院,北京 100038; 2.城市空間信息工程北京市重點實驗室,北京 100038)
1 引 言
隨著數字城市、智慧城市的快速推廣[1],無人機傾斜攝影測量以其高效率、高精度、高可視化進行實景三維建模的特點獲得廣泛關注[2,3]。實景三維建模已在規劃設計、地質災害治理、地籍調查、社區管理等領域中得到應用。已有應用研究表明,三維模型的精度對應用的成效具有一定影響作用,表1所示為模型精度在典型應用中所造成的影響。此外,在實際實景三維建模作業中,由于生產軟件及硬件設施的條件限制,無法對大面積區域完成一次建模,一般需要進行分區建模,此時,建模精度將對分區接邊的效果造成極大影響。為提高無人機傾斜攝影測量實景三維建模的效率效果及模型應用價值,有必要對影響建模精度的因素進行研究。
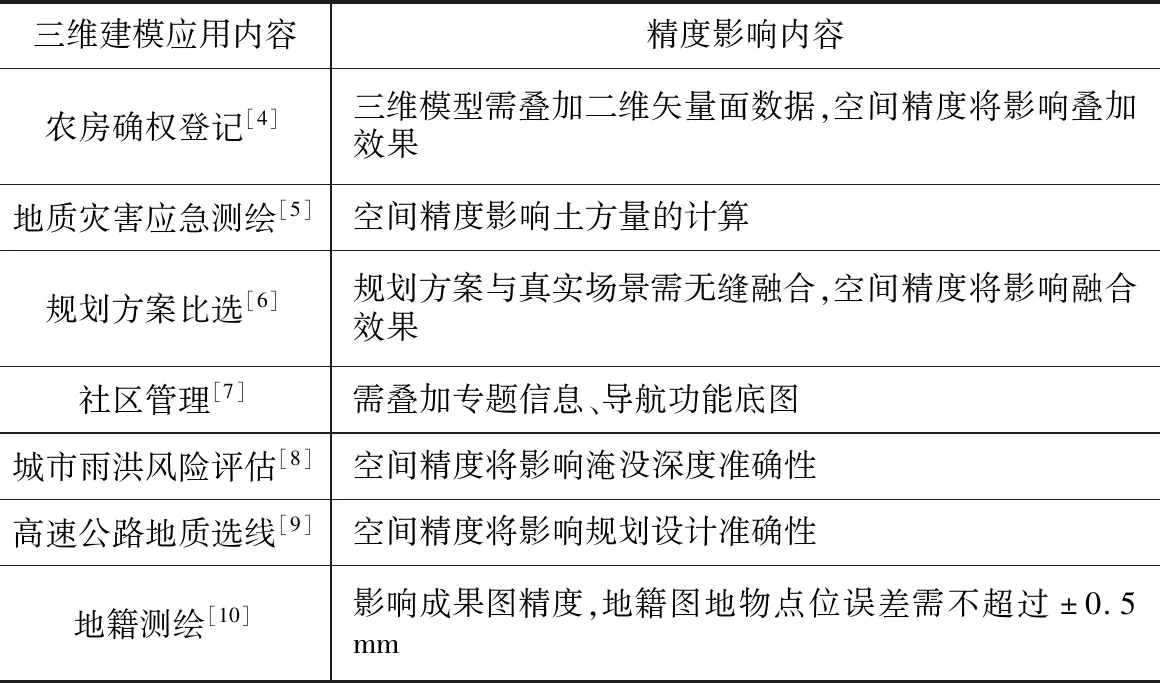
三維模型精度重要性 表1
由于航飛條件、外控布設條件、航線布設條件等多因素限制,在實際三維建模工作中,存在較難對某一因素進行控制的情況,無法通過控制單一因素達到控制精度的目的,因此,需要對多影響因素進行綜合分析。在對精度的影響因素方面,現有研究主要單獨針對控制點數量[13,14]、控制點分布[15]或航線規劃[16]等單因素進行不同方案的對比分析,利用同一數據源進行多影響因素綜合分析的研究比較匱乏。且在無人機傾斜攝影測量的成果類型方面,已有研究主要集中于正射影像和數字高程模型的精度研究[11,12],直接對三維模型精度進行分析的研究較少。
本文針對影響模型精度的控制點數量、控制點分布以及航線布設三個因素設計不同方案,進行無人機傾斜攝影實景三維建模并完成精度驗證,通過分析,為因條件限制造成的控制點布設困難提供方案參考,從多因素角度較為系統地為實際應用工作提出建議。
2 研究區與數據
研究選取北京市懷柔區某地區開展精度驗證實驗,研究區面積為 2.7 km2。研究區內包含平原區水泥廠區、山區采石區以及部分矮房居民區。平原廠區辦公區海拔高度 96 m~102 m;山區采石區包含兩座山,最高海拔高度 210.3 m;矮房居民區密集分布1層~2層建筑。所選研究區較為具有代表性,可涵蓋一般工程區域類型。研究區如圖1所示。
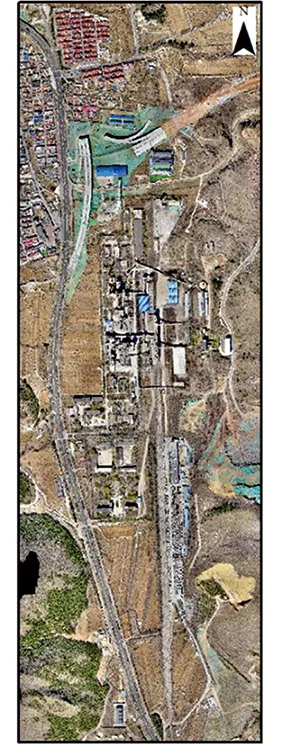
圖1 研究區
本研究航攝數據獲取使用成都縱橫大鵬無人機科技有限公司CW-10小型全電動垂直起降固定翼無人機系統,搭載JR503五拼傾斜攝影相機(總像素1.2億)。對研究區共進行3個架次航飛采集數據,每個架次均完全覆蓋研究區。前期南北向飛行一個架次,后期為進行航線布設對精度影響實驗,對研究區進行南北向和東西向各一個架次航飛(為防止時差問題對實驗造成影響,南北向為重復飛行),3個架次航向重疊度均為80%,旁像重疊度南北向為70%、東西向為50%。
控制點和檢查點采用RTK技術外業測量得到。實驗最終使用控制點和檢查點坐標系均為北京地方坐標系。
3 建模精度研究方案
本文選取控制點數量、航線布設和控制點分布三個主要影響因素,設計對比實驗,研究方案總體流程圖如圖2所示。
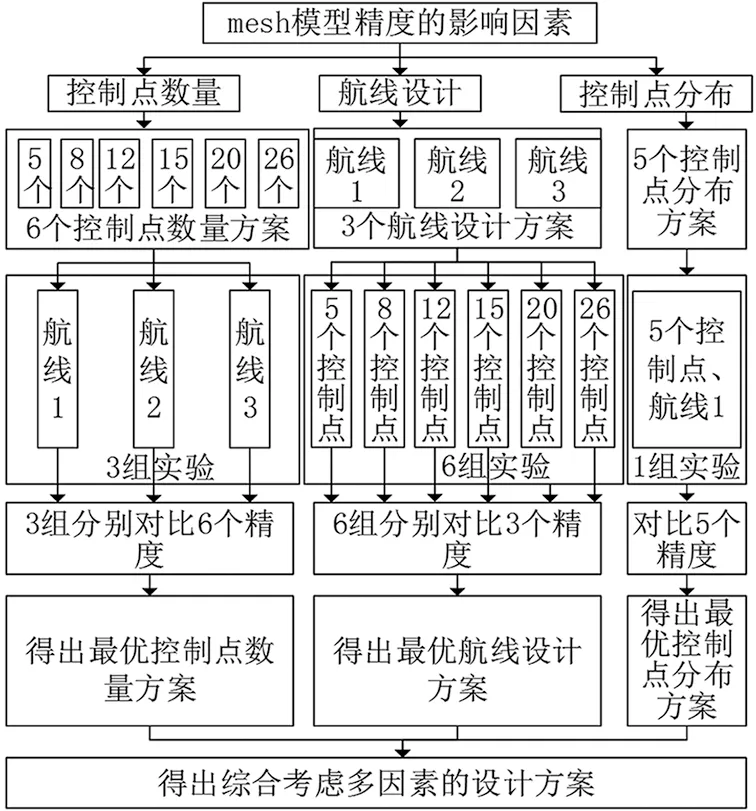
圖2 方案流程圖
3.1 控制點數量
為研究控制點(Ground Control Point,GCP)數量對建模精度的影響,分別選取5、8、12、15、20、26個控制點參與空中三角測量加密解算并完成三維建模。各組控制點選取均保證均勻分布,如圖3所示。
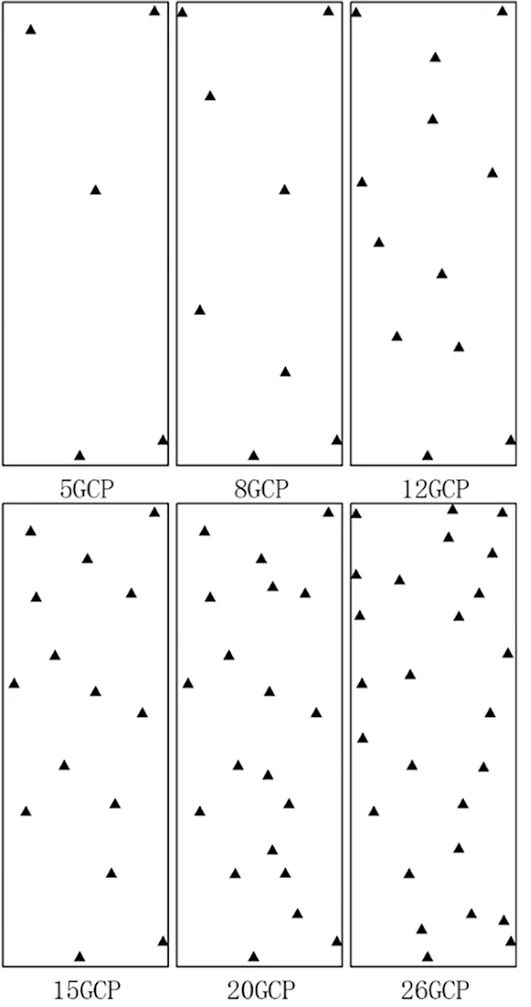
圖3 各組控制點分布圖
3.2 航線布設
為探討在控制點獲取有難度、外業實測控制點少的情況下,增加交叉航線是否相較于單向航線對提高模型精度有貢獻,設計三種航線布設方案(下述航線1、2、3)進行空中三角測量加密解算并完成三維建模。具體航線布設如圖4所示,航線1:南北單向航線;航線2:在南北單向航線的基礎上,增加東西航線形成交叉航線;航線3:在航線2的基礎上,增加東西航線密度,形成高密度交叉航線。
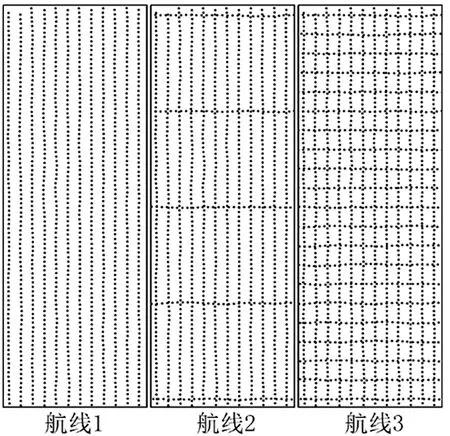
圖4 航線布設圖
3.3 控制點分布
為研究控制點分布對建模精度分布的影響,以5個控制點為例,分別選取5種分布方式進行空中三角測量加密解算并完成三維建模。
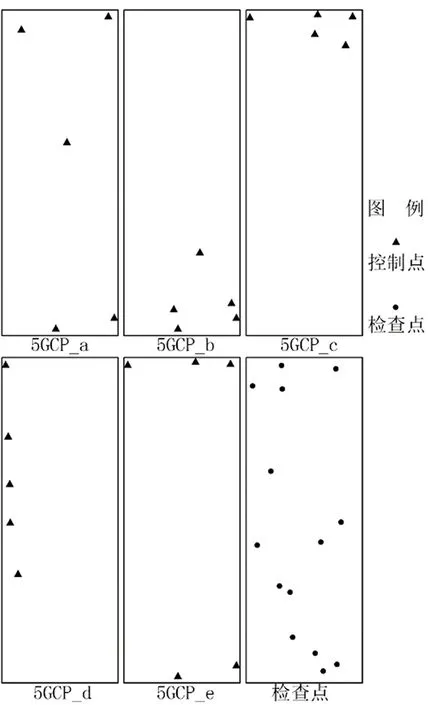
圖5 控制點和檢查點分布圖
五種控制點分布方案(下述5GCP_a、5GCP_b、5GCP_c、5GCP_d、5GCP_e、)間設計區別較大以使實驗結果顯著,控制點分布如圖5所示,5GCP_a:四角加中心點均勻分布;5GCP_b:5個控制點集中分布在南部;5GCP_c:5個控制點集中分布在北部;5GCP_d:5個控制點集中分布在西部;5GCP_e:5個控制點分布在南北部且四角分布。
4 精度評價與討論
選取14個外業測量點作為檢查點進行精度評定,分布如圖5檢查點所示。檢查點精度通過均方根誤差來表示[15],X方向(mx)、Y方向(my)、平面(ms)、高程(mh)的均方根誤差通過式(1)、(2)、(3)、(4)計算得出。
(1)
(2)
(3)
(4)
為合理化實驗方案,最大化利用實驗數據,形成對比試驗,使實驗結果更為可靠,研究不同航線布設情況下控制點數量對模型精度的影響,以及不同控制點數量情況下航線布設對模型精度的影響,分別使用上述三種航線,將均勻分布的5、8、12、15、20、26個控制點引入空中三角測量解算,進而進行三維模型重建得到不同的18個整體三維模型,從每個模型中提取14個檢查點的三維坐標作為模型匹配值,通過式(1)、(2)、(3)、(4)計算得出精度評定結果如表2所示。
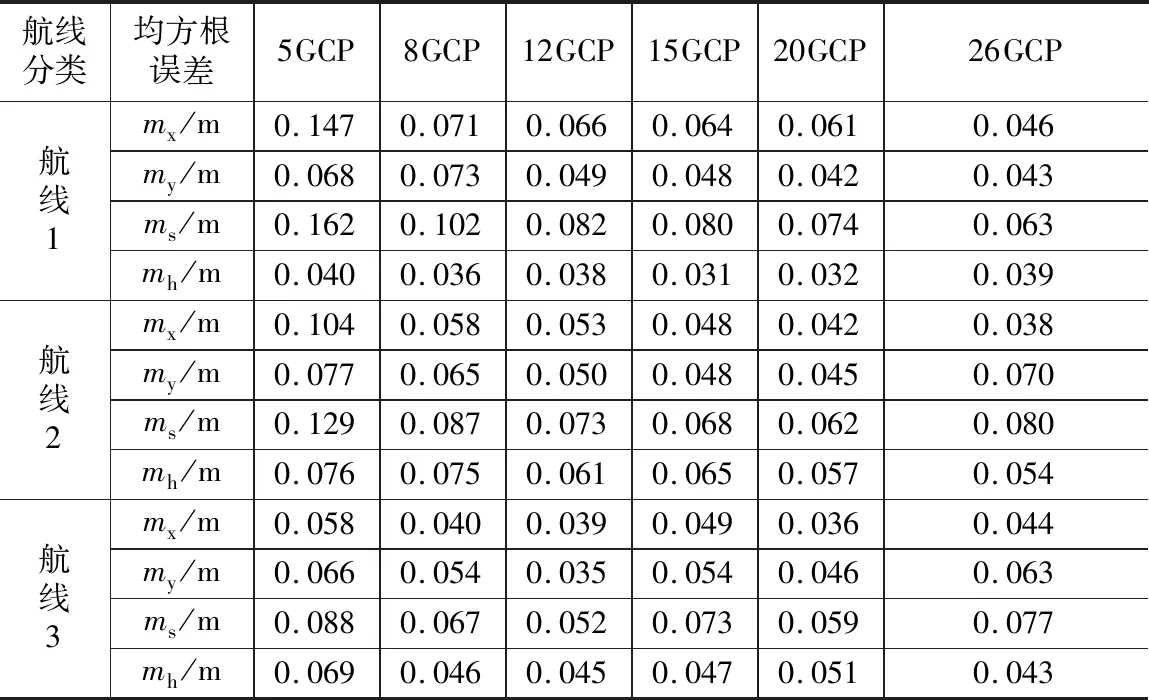
檢查點均方根誤差 表2
根據《CH/T 9015-2012三維地理信息模型數據產品規范》如表3、表4對精度的要求,1∶500成圖比例尺,非外業調繪情況下,平面精度為 0.5 m,高度精度為 0.8 m。根據表2,18個三維模型的平面精度和高程精度均可滿足產品規范要求。
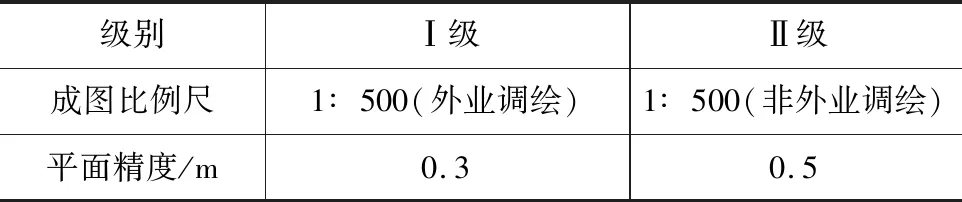
平面精度 表3
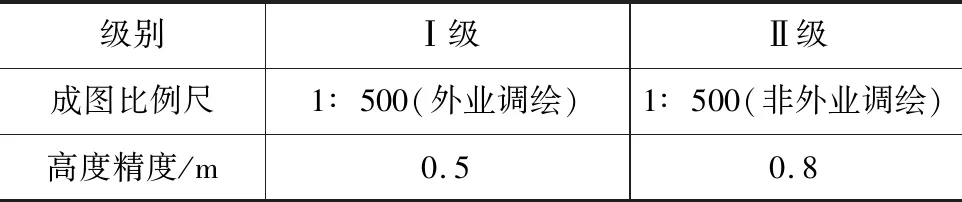
高度精度 表4
4.1 控制點數量
為便于分析不同數量控制點對模型精度的影響,將不同航線布設情況下,不同控制點數量的三維模型平面、高程均方根誤差變化趨勢以折線圖形式呈現,如圖6、圖7、圖8所示。
分析表2和圖6、圖7、圖8可知:①三種航線均方根誤差所呈現的整體趨勢基本一致,即隨著控制點數量增多,均方根誤差減小,模型位置精度增高;②控制點數量的無限增多并不能使模型精度無限增高,三種航線均呈現出隨控制點數量增多,均方根誤差減少至極值的趨勢,航線2和航線3的平面均方根誤差以及航線1的高程均方根誤差均出現小幅度增大的情況;③平面均方根誤差整體高于高程均方根誤差,這一特征不隨控制點數量變化而變化。
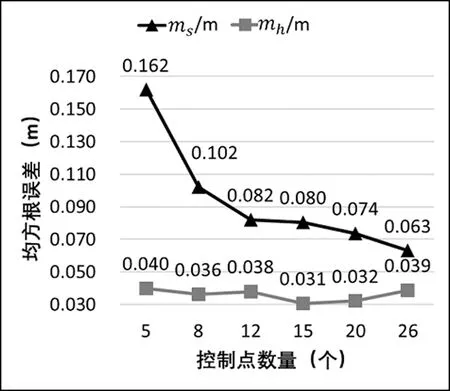
圖6 航線1平面、高程均方根誤差折線圖

圖8 航線3平面、高程均方根誤差折線圖
4.2 航線布設
通過對比圖9、圖10中三種航線的折線圖分析可得:①對于高程均方根誤差,航線2誤差最大,航線3次之,航線1的誤差最小;②對于平面均方根誤差,航線1誤差最大,航線2次之,航線3誤差最小;③交叉航線可一定程度提升模型平面誤差,但會降低高程誤差;④航線3較航線2在高程和平面上誤差均低,即交叉密度大的在提升模型精度方面表現較好。
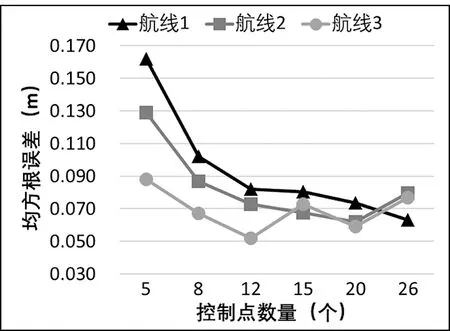
圖9 不同航線平面均方根誤差對比圖
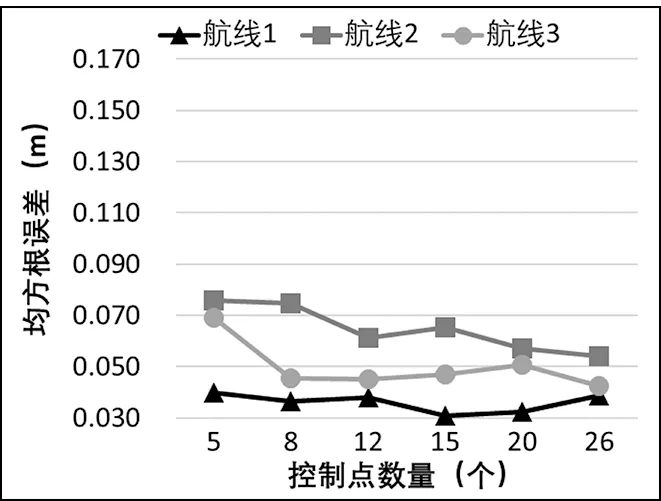
圖10 不同航線高程均方根誤差對比圖
4.3 控制點分布
(5)
(6)
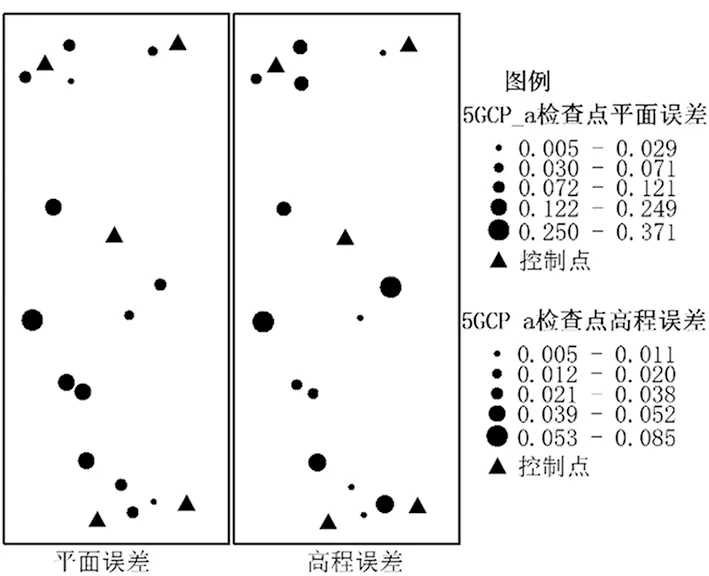
圖11 5GCP_1檢查點精度分布
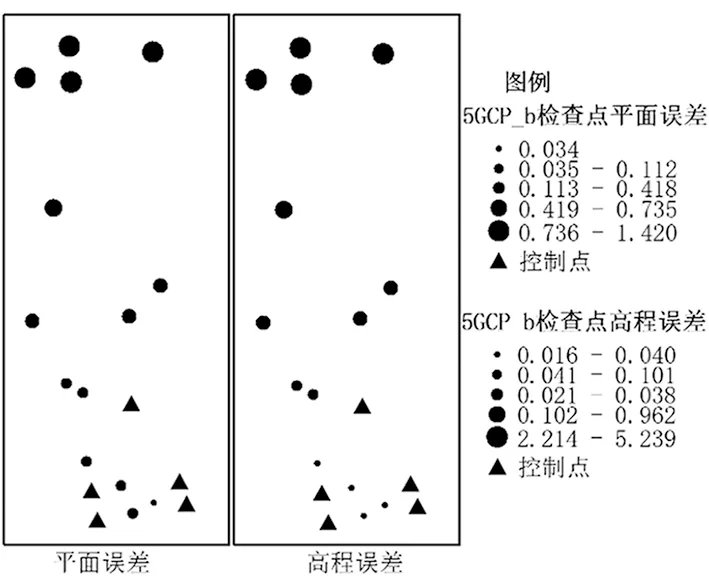
圖12 5GCP_2檢查點精度分布圖
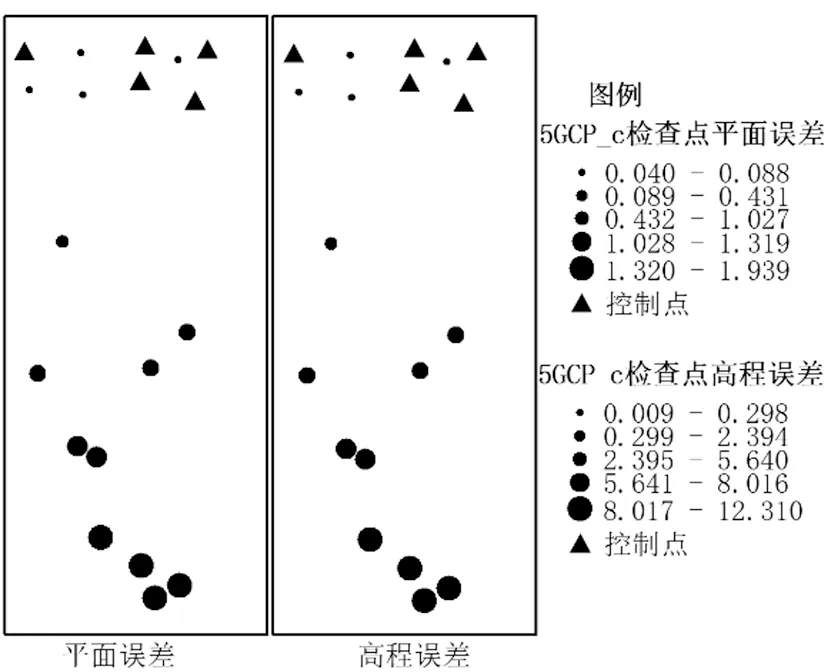
圖13 5GCP_3檢查點精度分布
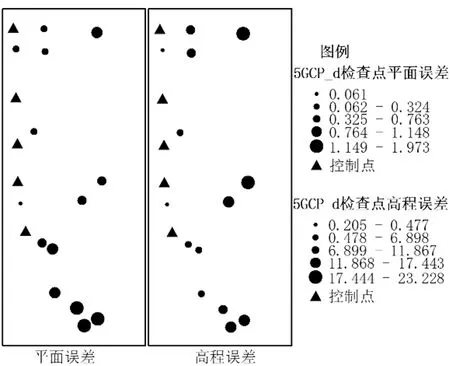
圖14 5GCP_4檢查點精度分布圖
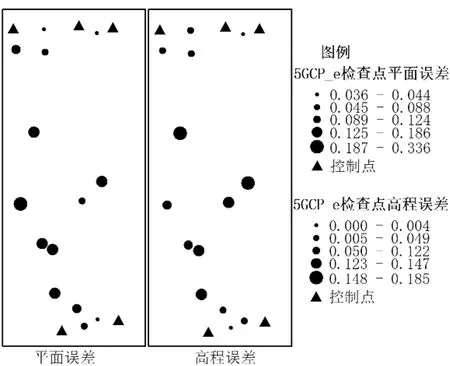
圖15 5GCP_5檢查點精度分布圖
為研究控制點分布對mesh模型精度的影響,以5個控制點、航線1方案為例,進行不同控制點分布對模型精度影響的實驗,均方根誤差結果如表5所示,各檢查點誤差分布情況如圖11~圖15(圖中各檢查點誤差均為絕對值,圓形由小到大代表差值絕對值由小到大)。根據表5,方案b、c、d的平面精度和高程精度均不滿足產品規范,即控制點分布不滿足四角布設的情況下精度無法達到產品規范對精度的要求。
根據表5和圖11~圖15可知:①相較于平面誤差,控制點分布不均對高程誤差的影響更大;②控制點分布不進行四角分布將造成誤差超限;③從圖中可以看出,控制點分布多的區域對精度的控制較好,控制點可控制區域有限;④方案e和方案a的均方根誤差最大為 0.162 m,這兩種方案均進行了四角分布;⑤5種分布方案中,方案一對精度的控制能力最佳,即四角加中心分布;⑥控制點布設有難度的情況下,必須保證四角布設,有條件時應至少保證四角加中心布設。
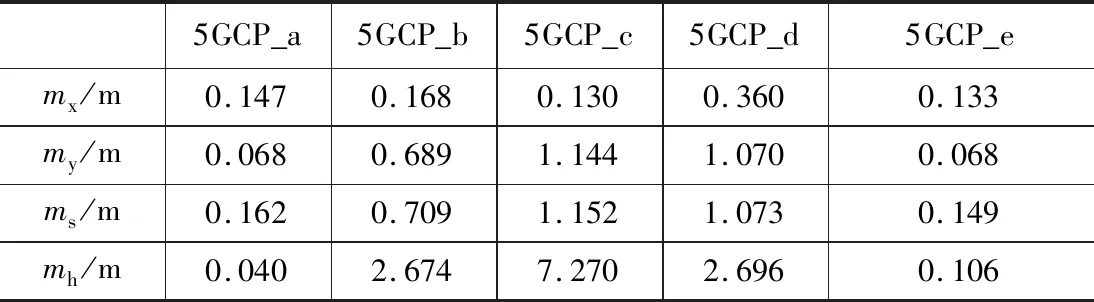
檢查點均方根誤差 表5
5 結 論
本文研究區內包含平原區水泥廠區、山區采石區以及部分矮房居民區,較具有代表性,可涵蓋一般工程區域類型。研究表明,控制點數量、控制點分布及航線規劃等因素對三維模型精度的影響較大,因此,本文選取上述三個因素綜合設計不同方案,選取6組不同數量控制點、3種航線方案、5組控制點分布分別引入空中三角測量加密解算并完成三維建模,選取14個檢查點對各組實景三維模型成果進行精度評定,基于本文條件下實驗結果得到以下結論:
(1)控制點數量越多,模型精度越高;控制點數量持續增加,模型精度增高趨勢趨于平緩;12個控制點時性價比較高,即平均 1 km2約4~5個點。
(2)相較于控制點數量,控制點分布對模型精度的影響性更高,即使不滿足 1 km24~5個控制點,保證四角分布的情況下精度也可滿足產品規范要求。
(3)在無法增加控制點布設以滿足分布要求和數量要求的情況下,交叉航線可一定程度提升平面精度。
(4)控制點布設必須保證四角布設,否則將造成精度超限和分區模型難以接邊的結果。
(5)控制點所能控制的區域有限,為保證不出現分區建模接邊分層問題,分區邊緣需均勻布設控制點。
綜上所述,在本文實驗方案下,滿足產品規范精度要求且最經濟的方案為單向航線、5個控制點且保證四角分布的方案,平面中誤差最大為 0.162 m、高程中誤差最大為 0.106 m。在實際工作中對控制點進行布設時,相比較考慮控制點的數量,應對控制點分布進行更多關注,分區邊緣控制點均勻分布尤為重要,將影響整體拼接效果和效率;如果存在無法增加控制點布設的情況,可考慮交叉航線,能一定程度提高模型精度。
本文結論可從多角度因素較為系統地為實際應用工作提出指導和建議,由于選區實驗區較小,今后的研究應將研究區擴展至大面積和地勢起伏大的區域。另外,隨著無人機傾斜攝影測量技術的發展,免像控攝影測量技術也日益成為關注的熱點[17,18]。免像控技術一般需要利用實時動態RTK測量系統及動態后處理差分PPK測量系統等差分定位技術,獲得高精度位置、姿態信息,在滿足產品坐標系統要求的情況下,今后的研究應考慮免像控技術對三維建模精度的貢獻。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
汽車工程學報(2017年2期)2017-07-05 08:13:02
光學精密工程(2016年6期)2016-11-07 09:07:19