含雙驅動五桿回路的弱耦合并聯機構型綜合
2021-11-09 08:44:40朱小蓉李世杰周宇東沈惠平
農業機械學報 2021年10期
關鍵詞:結構
朱小蓉 李世杰 周宇東 沈惠平
(常州大學機械工程學院, 常州 213164)
0 引言
并聯機構由于剛度大、承載能力強、精度高、自重負荷比小以及結構緊湊等優勢,可應用于裝配、虛擬軸機床、飛行模擬器和醫用機器人等領域,但并聯機構也存在工作空間小、耦合性強、軌跡規劃和控制復雜等缺點。隨著對并聯機構構型研究的深入和工程實際應用的需要,具有高性能的并聯機構的設計越來越受到重視。近年來,在并聯機構的支鏈結構中引入閉合回路,或者以閉合回路為基礎進行并聯機構的設計,已成為提升并聯機構性能的有效手段之一[1-11]。
目前,在支鏈中引入閉合回路的研究主要包括:①引入單自由度平行四邊形回路,增加機構的剛度和承載力。如Delta機構[1]、H4[2]、I4[3]、Par4[4]、X4[5]等并聯機構,每條支鏈中都含有一個平行四邊形鉸鏈;劉辛軍[6]提出一種含3個平行四邊形回路的6自由度并聯機構,研究表明機構的剛度和靈巧度有明顯提高。②引入多自由度的閉合回路形成冗余驅動,提升機構的剛度性能和承載性能。文獻[7-10]提出了將2自由度的平面五桿閉環結構引入支鏈構成冗余機構,該方法與直接引入冗余支鏈作用于動平臺相比,不僅具有更好的結構緊湊性和力學性能,而且增加了線速度和角速度的靈巧性[10]。③利用閉合回路的變尺度特性、奇異特性構成可重構機構。YE等[11]根據閉合回路驅動單元特性綜合出一類可適時切換不同操作模式的可重構并聯機構。
在理論研究方面,沈惠平等[12]提出了一種基于混合單開鏈的弱耦合并聯機器人機構的設計方法;陳宇航等[13]基于廣義螺旋推導出含子閉環并聯機構的一階、二階影響系數的通用計算公式,并對所提出的含PRRR子閉環的6自由度并聯機構進行了驗證;楊靜遠等[14]對含球面四桿閉環的球面并聯機構進行型綜合;賀利樂等[15]研究了基于5R和RPRPR閉環結構的并聯機構型綜合,得出9種空間并聯機構。
不難發現,現有含閉合回路的并聯機構中,平行四邊形4R是最常見的閉合回路。機構構型綜合的研究,大多數基于支鏈數等于機構自由度數目的設定,在此基礎上進行簡單支鏈(記為SOC)的設計,再通過運動副等效替換法設計含閉環結構的復雜支鏈(記為HSOC),使得現有的并聯機構,特別是含閉合回路的4~6自由度機構,支鏈多、容易干涉,工作空間小,特別是轉動能力弱;同時,由于支鏈間耦合性強,機構的運動學正解難、受力復雜、可控性差,制約著機構的實際應用。
實際上,多自由度閉合回路的自由度數目大于等于2,當作為多驅動單元構成并聯機構的支鏈時,可以減少組成并聯機構的支鏈數目,使得動平臺上的運動副數目減少,降低支鏈與平臺間的干涉,使得機構工作空間增加;另一方面,多自由度閉合回路自身的耦合度較低(如平面五桿回路耦合度為0),且隨著機構支鏈數目的減少,支鏈之間耦合程度也會降低,有利于改善機構運動學、動力學性能[16-17]。
綜上,含多驅動回路單元的并聯機構具有較好的應用前景,需要對這類機構的拓撲結構設計、運動學及其動力學問題進行系統、深入的研究。但現有大部分學者的研究對象是針對個別支鏈含回路的并聯機構,目前為止支鏈含回路的并聯機構的數量有限,特別是4~6自由度并聯機構構型;而針對支鏈含多驅動回路的并聯機構型綜合與分析一般方法的研究則更少。
本文根據基于方位特征(Position and orientation characteristic, POC)方程的并聯機構設計理論與方法(簡稱POC方法)[18-19],以含多驅動回路的3T1R并聯機構型綜合為例,提出其構型綜合的一般方法;基于所提出的綜合方法,綜合出含多驅動回路的3T1R、3T2R和3T3R新型并聯機構,分析新機構的拓撲結構特征。
1 基于POC方程的并聯機構拓撲結構設計方法
基于POC方程的并聯機構拓撲結構設計方法詳見文獻[18],為節約篇幅,這里僅給出部分內容。
1.1 串聯機構POC方程
串聯機構末端構件的POC方程為
(1)
式中Ms——串聯機構末端構件的POC
MJi——第i個運動副的POC
k——子SOC數目
m——串聯機構運動副數
Msub-socj——第j個閉合回路的POC
1.2 并聯機構POC方程
并聯機構由動平臺、定平臺和兩者之間的n條支鏈(SOC)組成,則并聯機構動平臺的POC方程為各支鏈末端構件POC之交集,即
(2)
式中Mpa——并聯機構動平臺的POC
Msj——串聯機構末端構件的POC
由式(2)可知,動平臺POC集是其組成支鏈POC的子集,即
Msj?Mpa(j=1,2,…,n)
(3)
1.3 并聯機構自由度
并聯機構全周自由度計算式為
(4)
(5)
式中F——機構自由度
fi——第i個運動副的自由度
ν——機構獨立回路數
Msi——第i條支鏈末端構件的POC集
1.4 并聯機構耦合度κ
由基于序單開鏈(Single open chain, SOC)的機構組成原理[18]可知,任一機構可分解為約束度為正、零、負的3種有序單開鏈(SOC),第j個SOCj的約束度定義為
(6)
式中mj——第j個SOC的運動副數
Ij——第j個SOC的驅動副數
進一步,一組有序的ν個SOC可組成一個零自由度的獨立回路數為ν的基本運動鏈(Basic kinematics chain, BKC),對一個BKC而言,須滿足
(7)
因此,BKC耦合度為
(8)
2 多驅動閉合回路及其拓撲結構特征
廣義地講,能產生期望POC的回路結構(并聯或串并聯,包括某些自由度F為1~5的并聯機構本身),再串聯若干運動副,皆可作為并聯機構的支鏈。為使機構結構簡單,本文僅考慮單回路的雙驅動閉合回路。另,考慮到六桿及以上閉合回路機構的桿件較多,若將其作為驅動單元會使機構整體剛度降低、運動學求解困難。因此,本文以五桿回路機構作為驅動單元進行并聯機構的構型綜合。同時,驅動元件布局在定平臺或靠近定平臺,且移動副為主驅動關節。
圖1給出了7種雙驅動五桿回路。根據回路末端輸出自由度的屬性可分為2類:



根據式(6)可得回路約束度為
因此,該回路機構耦合度為
κ(3S2P)=Δ(3S2P)=0
同樣的方法,可計算得到其余6種平面五桿回路機構的耦合度為
因此,本文所提7種雙驅動五桿回路機構的耦合度均為0,是運動學和動力學分析可獨立求解的最小單元。
3 含雙驅動五桿回路支鏈綜合
含多驅動回路的支鏈,是在多驅動回路的輸出運動副或輸出構件上串聯一開鏈結構(由一個或多個構件與運動副串接而成),記為HSOC,結構如圖2所示。因此,含多驅動回路的支鏈的綜合,首先選擇回路結構,使其輸出運動副或輸出構件產生一部分運動輸出元素(少于或等于支鏈期望POC),然后再構造剩余的開鏈結構。
以3T2R支鏈為例說明含五桿回路支鏈的設計步驟。
步驟1:列出需設計支鏈的POC集,即
(9)
步驟2:構造支鏈的回路部分。分別選取圖1中兩類回路機構,可產生Mb中的一部分移動量及轉動量,分別記為
步驟3:構造剩余的開鏈結構。根據式(9)中的Mb,在步驟2構造的回路結構的輸出構件上,構造由3個轉動副(如圖3a中R6、R7、R8),或2個轉動副(如圖3b的R6、R7)組成的開鏈結構,使之能補齊Mb中尚未實現的其余移動輸出及轉動輸出,從而完成支鏈整個結構的構造。當然,圖3a中的平面五桿機構可以由圖1b~1f所示的5種平面五桿回路替換。
采用同樣的方法,可構造出含雙驅動回路的3T3R支鏈,如圖4所示。同樣,圖4a中的平面五桿回路可以由圖1b~1f的5種回路替換。表1列出了圖3和圖4所示復雜支鏈(HSOC)的拓撲組成,同時給出了常見的不含回路的簡單支鏈(SOC),以便后續型綜合時直接引用。

表1 支鏈結構Tab.1 Structure of chains
步驟4:支鏈擴展。在開鏈POC集不變的條件下,借助運動副合并生成多自由度的運動副,以及改變運動副軸線之間的幾何關系等,可擴展支鏈的結構類型。例如,圖3a支鏈中正交的R6、R7轉動副可用U副替換;圖4a支鏈中R6、S7位置對調,或者采用兩個U副替換,可分別生成圖4c、4d所示支鏈。
4 含雙驅動回路并聯機構設計
4.1 3T1R并聯機構設計
依據基于POC方程的并聯機構拓撲結構設計方法[18],本節給出含雙驅動回路的3T1R并聯機構型綜合過程。
設計要求為:設計4自由度3T1R并聯機構,且至少有1條支鏈含雙驅動回路。


步驟3:支鏈的結構綜合。表1給出了含回路和不含回路的典型支鏈,為便于區分,分別用HSOC和SOC表示。
步驟4:確定HSOC和SOC支鏈組合方案。表2給出了機構自由度F、支鏈總數目n以及含回路支鏈數目nHSOC與不含回路支鏈數目nSOC之間的配置關系。

表2 機構F、n、nHSOC、nSOC之間的關系
根據表2配置方案,3T1R并聯機構的支鏈數目n可取2或3。當n=2時,nHSOC=2且nSOC=0,組成機構的兩支鏈均為復雜支鏈;當n=3時,nHSOC=1且nSOC=2,組成機構的支鏈既有復雜支鏈,也有簡單支鏈。
對表1列出的6種HSOC及5種SOC進行組合,可以生成滿足預定POC集與自由度要求的3T1R并聯機構。考慮結構及對稱性,本文給出3種3支鏈和2種2支鏈的組合方案,機構支鏈組成如表3所示。
步驟5:支鏈裝配條件的確定。根據式(2),為實現動平臺輸出為3T1R,各條支鏈POC集交運算后需約束掉其余兩個方向的轉動元素。以表3中序號1的支鏈組合方案為例,確定支鏈在兩平臺裝配的幾何條件。
(1) 已知機構由1條HSOC支鏈和2條SOC支鏈構成
1-HSOC:{-(P(3R2P ),P(3R2P))⊥R17‖R18-}
2-SOC:{-Pi1‖Ri2‖Ri3⊥Ri4‖Ri5-} (i=2,3)

表3 3T1R機構的支鏈組合方案Tab.3 Combination of 3T1R parallel mechanisms
(2)在動平臺上任意選取點O′為基點。
(3)確定支鏈的POC集。
(4)建立并聯機構的POC集。將預定的機構動平臺POC集和支鏈POC集,代入式(2),得到
式中,?表示上式左端是所有支鏈POC集“交”運算的預定目標。
當R16‖R23且R18‖R25時,動平臺只存在繞R18軸線方向的轉動和三維移動。按此裝配幾何條件得到的并聯機構,如圖5a所示。
類似地,對表3的其他幾種支鏈組合方案,仿照以上步驟,可得到其余3T1R并聯機構,其結構簡圖分別如圖5b~5d所示。
步驟6:選定機構驅動副。
對于自由度為F的機構,在判定其驅動副時,可將預定的F個運動副鎖死,此時得到的新機構的自由度若為0,則該F個運動副可同時作為機構的驅動副,否則,該F個運動副不能同時作為機構的驅動副[18]。
以圖5a為例,判定該機構定平臺上的4個P副是否可為驅動副。
將定平臺4個P副(P11、P15、P21、P31)鎖死,得到新的并聯機構,其第1條支鏈自由度為3,拓撲組成為HSOC{-(R16⊥R17‖R18)-};第2、3條支鏈為{-Ri2‖Ri3-Ri4‖Ri5-}(i=2,3),自由度為4。
新機構3條支鏈的POC集分別為
確定第1個獨立回路的獨立位移方程數為

由第1、2支鏈構成的子并聯機構自由度為
且子并聯機構動平臺的POC集為

計算第2個獨立回路的獨立位移方程數為
機構自由度為
由于新機構自由度為0,則定平臺上4個P副可同時作為驅動副。
類似地,可用同樣方法判定圖5所示其余4種并聯機構的驅動副。結果表明,圖5b、5d、5e所示機構的移動副均可作為主驅動;圖5c基座上R21、R31以及移動副P12和P14可作為機構的驅動副。
4.2 3T2R并聯機構設計
3T2R并聯機構動平臺期望的自由度F=5和POC集Mp=[t3r2]T。由式(3)可知,其支鏈的運動輸出可取[t3r2]T和[t3r3]T。
根據表2中5自由度并聯機構的HSOC和SOC配置方案,含雙驅動回路的3T2R并聯機構可分為兩大類:①支鏈數目為4,其中nHSOC=1 且nSOC=3。②支鏈數目為3,其中nHSOC=2 且nSOC=1。表4為2種4支鏈和4種3支鏈的組合方案,結構簡圖如圖6所示。

表4 3T2R機構的支鏈組合方案Tab.4 Combination of 3T2R parallel mechanisms
4.3 3T3R并聯機構設計
3T3R并聯機構動平臺期望的自由度F=6且POC集Mp=[t3r3]T,機構所有支鏈的運動輸出均為[t3r3]T。
根據表2列出的6自由度并聯機構支鏈的配置方案,含雙驅動回路的3T3R并聯機構有3類:①支鏈數目n=5,其中nHSOC=1 且nSOC=4。② 支鏈數目n=4,nHSOC=2 且nSOC=2。③ 支鏈數目n=3,nHSOC=3 且nSOC=0。本文只考慮支鏈數目為4和3的兩類構型,表5為2種4支鏈和2種3支鏈組合方案,圖7為其結構簡圖。
5 機構拓撲結構特征分析
根據文獻[18]提出的拓撲結構特征計算方法,對圖5~7中的5種3T1R、6種3T2R和4種3T3R并聯機構進行拓撲結構特征分析,得到過約束數Nov、耦合度κ等,結果如表6~8所示。

表5 3T3R機構的支鏈組合方案Tab.5 Combination of 3T3R parallel mechanisms
由表6~8可知,綜合出的新機構結構緊湊,具有適度的非對稱性;15種機型中,耦合度為2的機構僅3種(圖5c、6a、6b機構),其余機構的耦合度均為0或1。由文獻[20-21]可知,典型的6支鏈6自由度Stewart并聯機構的耦合度為3,機構輸入-輸出運動耦合性強、運動學正解求解復雜;文獻[22-25]通過結構降耦得到了多種低耦合度的6自由度機構,但大多含有二重球副或三重球副,加工制造困難。而本文綜合的4支鏈和3支鏈6-DOF并聯機構的耦合度均為1,驅動回路部分的耦合度為0,且不含被動移動副和復合球副,加工制造容易實現;進一步的運動學分析表明,機構存在運動學正逆解的解析解,易于實時控制。
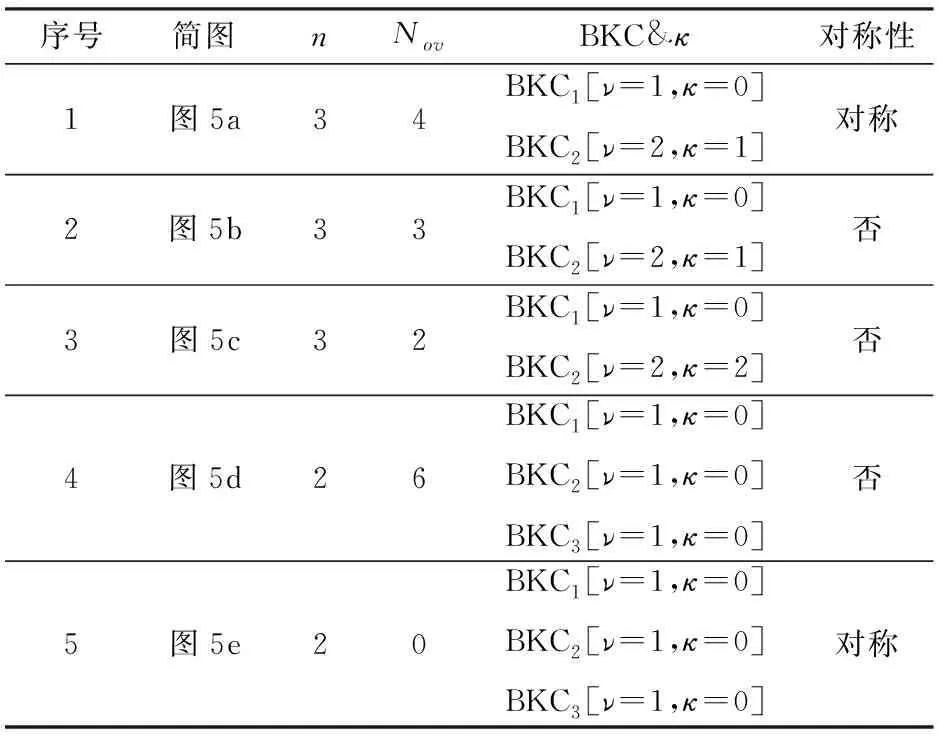
表6 3T1R并聯機構的拓撲結構特征Tab.6 Topology characteristics of 3T1R PMs

表7 3T2R并聯機構的拓撲結構特征Tab.7 Topology characteristics of 3T2R PMs

表8 3T3R并聯機構的拓撲結構特征Tab.8 Topology characteristics of 3T3R PMs
6 結論
(1)分析了7種五桿回路的拓撲組成、等效輸出及其耦合度,并提出了多種含雙驅動五桿回路的復雜支鏈。
(2)根據基于POC方程的拓撲結構設計方法,綜合出含雙驅動五桿回路的5種3T1R、6種3T2R和4種3T3R并聯機構構型,機構結構緊湊,驅動安裝在基座上,帶負載能力強;動平臺上運動副數目較少,支鏈間的干涉降低,工作空間增加;大多數機構具有較好的對稱性,有利于載荷均勻分布。
(3)進一步對綜合出的15種機構進行拓撲結構特征分析,結果表明大多數新機型具有過約束,且具有較低的耦合度,有利于改善機構的運動學、靜剛度及動力學性能,具有較好的應用前景。
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50