一種基于航拍無(wú)人機(jī)的高橋墩偏位檢測(cè)方法
2021-11-08 11:26:08焦華成吳春利陳江川王子琳
公路交通技術(shù) 2021年5期
關(guān)鍵詞:檢測(cè)
焦華成, 吳春利, 陳江川, 周 森, 王子琳
(吉林大學(xué), 長(zhǎng)春 130000)
高橋墩偏位是橋梁安全的重大隱患[1]。當(dāng)高橋墩出現(xiàn)偏位時(shí),高橋墩受力位置不再位于高橋墩截面中心,會(huì)出現(xiàn)偏心受力,這將繼續(xù)加大高橋墩偏位,致使橋梁逐漸喪失穩(wěn)定性,直至破壞[2]。高橋墩偏位是評(píng)估橋梁是否安全的一個(gè)重要技術(shù)指標(biāo),因此,對(duì)使用中的高橋墩進(jìn)行偏位檢測(cè)極為重要[3]。常規(guī)檢測(cè)方式,先通過(guò)目測(cè)發(fā)現(xiàn)可能出現(xiàn)偏位的高橋墩[4],后對(duì)有偏位嫌疑的高橋墩進(jìn)行人工偏位檢測(cè),這既需耗費(fèi)大量人力,且檢測(cè)區(qū)域有限,又難以高效準(zhǔn)確地對(duì)高橋墩進(jìn)行檢測(cè)[5]。因此,在高橋墩偏位檢測(cè)領(lǐng)域,急需一種安全、快捷、機(jī)動(dòng)性強(qiáng)、適應(yīng)性強(qiáng)的檢測(cè)手段[6]。為解決這一難題,本文提出了一種基于航拍無(wú)人機(jī)的高橋墩偏位檢測(cè)方法,此方法能夠快速對(duì)高橋墩進(jìn)行偏位檢測(cè)。
1 航拍無(wú)人機(jī)
航拍無(wú)人機(jī)爬升力較強(qiáng),高度控制靈活,在短時(shí)間內(nèi)能夠完成從低海拔爬升至幾百米高空的飛行任務(wù),也能夠進(jìn)行50 m以內(nèi)的超低空拍攝。航拍無(wú)人機(jī)在操控上極為方便,起飛降落受場(chǎng)地空間限制較小,在操場(chǎng)、公路或其它較開(kāi)闊的地面均可起降。無(wú)人機(jī)小型輕便、機(jī)動(dòng)靈活、穩(wěn)定性和安全性好。
此前,航拍無(wú)人機(jī)多用于攝影、新聞、測(cè)量、地質(zhì)勘察等方面,對(duì)于高橋墩偏位這種需要高精度數(shù)據(jù)且受外界環(huán)境影響較大的領(lǐng)域,航拍無(wú)人機(jī)的應(yīng)用仍是一片空白。
目前,航拍無(wú)人機(jī)已能在4級(jí)風(fēng)力的影響下平穩(wěn)拍攝圖片。隨著衛(wèi)星定位系統(tǒng)不斷升級(jí),新型航拍無(wú)人機(jī)已能直接顯示出拍攝時(shí)的鏡頭與拍攝點(diǎn)的水平面夾角。在扣除相應(yīng)夾角后,可認(rèn)為拍攝時(shí)的鏡頭是絕對(duì)水平的。高橋墩偏位檢測(cè)就是運(yùn)用無(wú)人機(jī)的這項(xiàng)功能進(jìn)行航拍。工作時(shí)無(wú)人機(jī)需與終端設(shè)備(手機(jī)、電腦、iPad等)連接,并通過(guò)終端設(shè)備控制飛行。飛行時(shí)的數(shù)據(jù)(飛行高度、傾斜角度等)可在終端設(shè)備的顯示屏直接展示。
2 無(wú)人機(jī)航拍過(guò)程
1) 對(duì)無(wú)人機(jī)進(jìn)行開(kāi)機(jī)處理,放置在合適位置,注意來(lái)往車輛。案例中放置在高橋墩的正前方。
2) 調(diào)試終端設(shè)備,將終端設(shè)備與無(wú)人機(jī)連接,檢查連接情況,確認(rèn)GPS信號(hào)是否滿足飛行要求,并測(cè)試設(shè)備是否正常。
3) 進(jìn)行高橋墩偏位檢測(cè)。所在城市當(dāng)中無(wú)法找到高度20 m以上的高橋墩,案例中以15 m的高橋墩為例。
(1) 將已開(kāi)機(jī)的無(wú)人機(jī)放置在高橋墩正面。
(2) 終端設(shè)備按步驟調(diào)試正常后,控制無(wú)人機(jī)上下飛行,飛行中不能左右擺動(dòng)(高橋墩附近一般為空曠地帶,無(wú)人機(jī)無(wú)需規(guī)避障礙,能夠豎直飛行),無(wú)人機(jī)從地面飛行到高橋墩頂部。
(3) 飛行過(guò)程中,每隔一段相等距離拍攝一張圖片,確保高橋墩每一部分都能被拍攝下來(lái)。
(4) 案例中,將無(wú)人機(jī)放置在高橋墩的正前方2 m處,豎直方向自下而上每隔1 m拍攝一張圖片,共拍攝15張圖片。
3 航拍圖片的處理
3.1 圖片前期處理
1) 根據(jù)終端設(shè)備屏幕顯示的傾斜角度,并按屏幕提示的旋轉(zhuǎn)方向?qū)D片旋轉(zhuǎn)相應(yīng)的傾斜角度。處理完后,可認(rèn)為圖片拍攝時(shí)鏡頭處于水平位置,以減小因航拍無(wú)人機(jī)抖動(dòng)而產(chǎn)生的誤差。
2) 在高橋墩最底部拍攝的圖片底部建立坐標(biāo),x坐標(biāo)與圖片底部重合,坐標(biāo)原點(diǎn)在底部橋墩的中點(diǎn)[7],坐標(biāo)系如圖1所示。

圖1 高橋墩底部第1張圖片坐標(biāo)系建立
拍攝過(guò)程中,只允許航拍無(wú)人機(jī)上下移動(dòng)。因此,在第1張圖片的坐標(biāo)軸確定后,其余圖片的y軸與第1張圖片的y軸重合,x軸則依次向上平移,按等間距拍攝相鄰圖片的高差段即可。案例中依次向上平移1 m。
3.2 航拍圖片中高橋墩中軸線的擬合[8]
1) 偏位高橋墩中軸線在已定坐標(biāo)系下的中軸線方程
高橋墩偏位時(shí),支座處力的作用點(diǎn)將發(fā)生變化,由高橋墩中心向邊緣偏移[9]。根據(jù)彈性力學(xué)原理,支座處力的作用面可視為小邊界,因此,運(yùn)用圣維南原理,將模型進(jìn)行簡(jiǎn)化,如圖2所示。
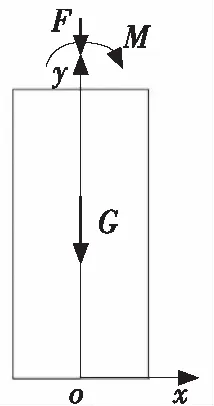
圖2 高橋墩受力模型
當(dāng)支座施加在高橋墩頂部豎直向下的力F與自重G單獨(dú)作用時(shí),只能引起高橋墩的豎向沉降,彎矩M是引起橫向偏移的主要原因。下面根據(jù)彈性力學(xué)對(duì)高橋墩中軸線方程進(jìn)行推導(dǎo)。
根據(jù)矩形梁受純彎曲時(shí),應(yīng)力分量表達(dá)式得:
(1)
代入物理方程得:
(2)
代入幾何方程得:
(3)
對(duì)x和y積分得:
(4)
式中:f1和f2分別是x和y的待定函數(shù);u和v是模型中軸線縱向和橫向的位移;I是模型橫截面慣性矩。
將式(4)代入式(3)中的第3式得:
(5)
將式(5)移項(xiàng)得:
(6)
從式(6)可以看出,等式左邊只是y的函數(shù),而等式右邊只是x的函數(shù)。若想要等式(6)成立,則兩邊都等于同一常數(shù)ω,代入式(6)得:
(7)
對(duì)式(7)積分得:
f1(y)=-ωy+u0
(8)
(9)
將式(8)、式(9)代入式(4)得:
(10)
(11)
根據(jù)位移邊界條件:
(12)
式中:h為模型高度。
將式(12)代入式(10)和式(11)得:
u0=0
(13)
(14)
聯(lián)立式(14),解得:
(15)
將式(15)代入式(10)和式(11)得:
(16)
將x=0代入式(16)的第2式得:
(17)
式中:v是模型中軸線的橫向位移。
2) 航拍圖片中高橋墩中軸線的擬合
(1) 圖片的二值化處理
對(duì)彩色圖片灰度化后,把獲取到的灰度圖像進(jìn)行二值化處理。即將目標(biāo)用戶背景分類,為后續(xù)的識(shí)別做準(zhǔn)備。二值化方法采用閾值法,它利用圖像中目標(biāo)與背景的差異,把圖像分別設(shè)置為2個(gè)不同的級(jí)別,通過(guò)選取一個(gè)合適的閾值,確定某像素是目標(biāo)還是背景,從而獲得二值化的圖像。
(2) 使用Matlab對(duì)橋墩邊界進(jìn)行識(shí)別,提取像素點(diǎn)坐標(biāo)
將二值化處理后的圖片導(dǎo)入Matlab,并對(duì)高橋墩邊界像素點(diǎn)進(jìn)行檢索,提取每行像素的邊界點(diǎn)坐標(biāo)。
(3) 高橋墩中軸線像素點(diǎn)坐標(biāo)的確定
高橋墩采用對(duì)稱式設(shè)計(jì),中軸線應(yīng)位于左右邊界連線中點(diǎn)處。對(duì)每行邊界像素點(diǎn)的橫坐標(biāo)取平均值,得到中軸線像素點(diǎn)的橫坐標(biāo)。中軸線像素點(diǎn)的縱坐標(biāo)與相應(yīng)邊界像素點(diǎn)縱坐標(biāo)相同,從而確定中軸線像素點(diǎn)坐標(biāo)。
(4) 高橋墩中軸線方程的擬合
中軸線像素點(diǎn)坐標(biāo)已知,所有像素點(diǎn)依次連成一條曲線,即為高橋墩中軸線[10]。已知高橋墩中軸線方程為二次方程,運(yùn)用Matlab對(duì)中軸線進(jìn)行二次方程擬合,擬合形式為:y=ax2+bx+c。
3) 坐標(biāo)軸的等價(jià)轉(zhuǎn)換
高橋墩中軸線擬合后,每張圖片在自身的坐標(biāo)系下都有一個(gè)中軸線方程,即每段高橋墩的中軸線方程。
每張圖片都有一個(gè)坐標(biāo)系,每個(gè)坐標(biāo)系只有x軸移動(dòng),y軸沒(méi)有移動(dòng)[11],即x軸上下移動(dòng)。因此,軸線方程中只有c值變化。每張圖片中軸線方程形式為:y=ax2+bx+c,理論上每張圖片中的a值和b值應(yīng)相等,c值不同,c值不同代表圖片所處的位置不同。
每張圖片處理時(shí)有偶然誤差,為減小偶然誤差,對(duì)所有圖片的a值和b值進(jìn)行如下平均處理:
(1) 每張圖片中的中軸線方程進(jìn)行求導(dǎo)后,為y′=2ax+b。

3.3 高橋墩偏位角度的計(jì)算
得到高橋墩中軸線方程后,對(duì)軸線方程求導(dǎo),得到中軸線方程的切線方程,代入邊界條件求出斜率后,進(jìn)行反三角函數(shù)運(yùn)算,可求出高橋墩的偏位角度[12]。
4 航拍圖片實(shí)際處理過(guò)程
以15 m高橋墩為例,從下而上共拍攝15張圖片,以其中一張圖片舉例說(shuō)明。
4.1 圖片的二值化處理
調(diào)整圖片閾值為180,高橋墩與圖片背景因顏色不同而分離,如圖3所示。
圖3 二值化處理示意
4.2 邊界點(diǎn)像素點(diǎn)坐標(biāo)的提取
將二值化處理后的圖片導(dǎo)入Matlab,對(duì)高橋墩邊界像素點(diǎn)進(jìn)行檢索,提取每行像素的邊界點(diǎn)坐標(biāo),如圖4所示。
4.3 中軸線像素點(diǎn)坐標(biāo)的確定
對(duì)每行邊界像素點(diǎn)的橫坐標(biāo)取平均值,得到中軸線像素點(diǎn)的橫坐標(biāo)。中軸線像素點(diǎn)的縱坐標(biāo)與相應(yīng)邊界像素點(diǎn)縱坐標(biāo)相同,從而得到中軸線像素點(diǎn)坐標(biāo),如圖5所示。
圖4 邊界像素點(diǎn)提取示意
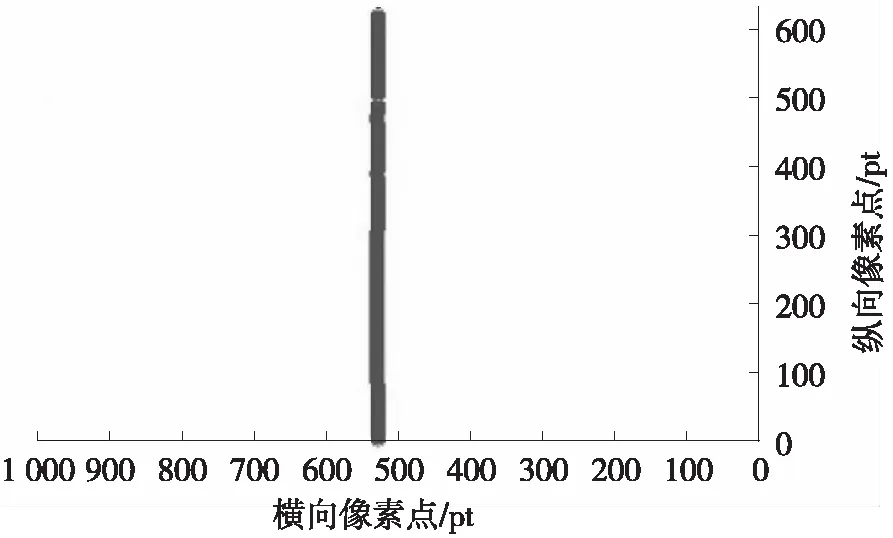
圖5 中軸線像素點(diǎn)坐標(biāo)
4.4 高橋墩中軸線方程的擬合
1) 先旋轉(zhuǎn)中軸線,后擬合
中軸線接近90°,擬合時(shí)a值很大,軸線方程類似指數(shù)方程,擬合結(jié)果會(huì)有較大誤差。為了減小誤差,將軸線進(jìn)行90°旋轉(zhuǎn)后擬合,如圖6所示。
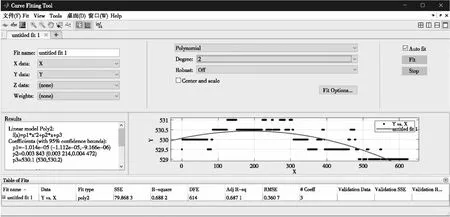
圖6 中軸線擬合
2) 擬合后中軸線方程的a、b值
根據(jù)圖6,該圖片中高橋墩中軸線方程為:
y=-1.014×10-5x2+3.843×10-3x+c
同理可得其它14張圖片中的中軸線方程,其a、b值如表1所示。

表1 15張圖片中中軸線方程的a、b值
3) 根據(jù)中軸線方程求中軸線偏位角度
(1) 根據(jù)表1列出整體中軸線方程
y=-1.013×10-5x2+3.845×10-3x+c
(18)
(2) 對(duì)整體中軸線方程求導(dǎo)
y′=-2.026×10-5x+3.845×10-3
(19)
(3) 求中軸線偏位角度
工程上以高橋墩底部偏位角度為技術(shù)標(biāo)準(zhǔn),因此,將x=0代入式(19)得:
y′=3.845×10-3
已知x=0處中軸線的斜率,進(jìn)行反三角函數(shù)運(yùn)算得出角度。
tan-13.845×10-3=0.22°
偏位角度為0.22°,該高橋墩偏位符合要求。
整個(gè)圖片的處理過(guò)程,編寫(xiě)成一套Matlab程序處理。當(dāng)無(wú)人機(jī)航拍完一組圖片后,將圖片導(dǎo)入程序,便能快速準(zhǔn)確得到結(jié)果[13]。
5 精度檢驗(yàn)
受條件限制,無(wú)法通過(guò)室外試驗(yàn)來(lái)檢驗(yàn)該方法的精度,因此,通過(guò)室內(nèi)試驗(yàn)進(jìn)行檢驗(yàn)。
5.1 運(yùn)用CAD軟件模擬高橋墩偏位后的正面圖,并借助軟件求出偏位角度
在CAD軟件中畫(huà)出高橋墩模擬圖,偏位角度設(shè)置為5°,在高橋墩底部建立坐標(biāo),如圖7所示。
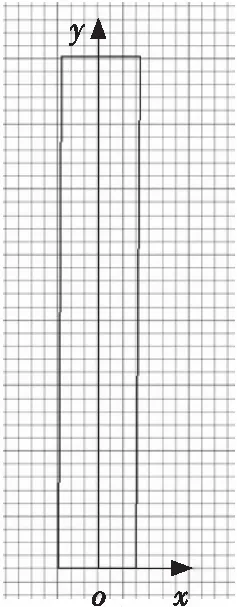
圖7 高橋墩模擬
實(shí)際工程中,偏位角度很小[14]。但角度過(guò)小不利于精度檢驗(yàn),為了提高精度,將正面圖的偏位角度適當(dāng)放大[15]。
5.2 運(yùn)用本文方法對(duì)正面圖進(jìn)行處理,求出中軸線偏位角度
運(yùn)用上文所述的方法,將圖7進(jìn)行處理,模擬出中軸線方程,如圖8所示。
中軸線方程為:
y=4.498×10-5x2+8.248×10-2x+c
(20)
中軸線切線方程為:
y′=4.498×10-5x+8.248×10-2
(21)
中軸線偏位角度為:
tan-18.248×10-2=4.72°
5.3 誤差比較
根據(jù)上述計(jì)算可知,真實(shí)角度為5°,計(jì)算結(jié)果為4.72°,則精度為:
(5-4.72)÷5=5.6%
本方法計(jì)算出的結(jié)果與真實(shí)角度的誤差為5.6%,精度較高[16]。

圖8 中軸線方程模擬
6 結(jié)論
1) 本文提出的基于航拍無(wú)人機(jī)的高橋墩偏位檢測(cè)方法已成功應(yīng)用于長(zhǎng)春三號(hào)線的橋墩檢測(cè),工程應(yīng)用檢測(cè)快速、結(jié)果準(zhǔn)確。
2) 試驗(yàn)結(jié)果表明,此方法所計(jì)算出的高橋墩偏位角度與真實(shí)偏位角度偏差不超過(guò)6%,符合工程要求。
3) 目前,此方法相較常規(guī)檢測(cè)方法更能準(zhǔn)確、高效、快速地進(jìn)行大范圍的高橋墩偏位檢測(cè),適宜推廣。
4) 未來(lái)幾年,隨著航拍無(wú)人機(jī)技術(shù)的不斷升級(jí),拍攝將更加穩(wěn)定、準(zhǔn)確,檢測(cè)精度將大大提高。
猜你喜歡
中國(guó)設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:36
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:34
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:50
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:48