一種星敏感器/陀螺組合衛(wèi)星姿態(tài)確定算法
2021-11-08 01:59:36周竹青李星秀吳盤龍
兵器裝備工程學(xué)報 2021年10期
關(guān)鍵詞:測量
周竹青,李星秀,吳盤龍
(南京理工大學(xué) a.自動化學(xué)院;b.理學(xué)院,南京 210094)
1 引言
遙感衛(wèi)星是觀測地表覆蓋和自然現(xiàn)象的一個重要手段,隨著對地觀測技術(shù)的發(fā)展,在無地面控制條件下,衛(wèi)星遙感對地觀測定位精度要求越來越高。高精度的姿態(tài)信息是測繪衛(wèi)星高精度定位,特別是無地面控制下定位的重要前提[1-2]。高精度測繪衛(wèi)星的自主定姿可以采用星敏感器/陀螺組合定姿方案,因?yàn)橥勇菽軌蜻B續(xù)輸出角速度,實(shí)時性好,但是陀螺存在漂移;而星敏感器可以獲得高精度的姿態(tài)信息,但是它的工作頻率較低。星敏感器/陀螺組合定姿方案用星敏感器獲得的高精度的姿態(tài)信息來補(bǔ)償陀螺漂移量,實(shí)現(xiàn)互補(bǔ),獲得高精度的衛(wèi)星姿態(tài)[3],為測繪衛(wèi)星定位精度的提高打下基礎(chǔ)。
姿態(tài)確定方法分為兩類,一類是確定性方法,另一類是狀態(tài)估計(jì)方法。確定性方法就是根據(jù)一組矢量觀測值求出衛(wèi)星的姿態(tài),有TRIAD、q-方法、QUEST法等,其中QUEST算法與其他算法相比,兼具魯棒性和快速性[4-6]。確定性方法結(jié)構(gòu)簡單清晰,但是無法考慮測量過程和模型中的各種誤差,而且只能處理星敏感器這類輸出觀測矢量敏感器輸出的數(shù)據(jù),無法處理陀螺數(shù)據(jù)。狀態(tài)估計(jì)算法就是通過建立狀態(tài)量的狀態(tài)方程和測量方程,應(yīng)用估計(jì)算法,根據(jù)觀測量估計(jì)出狀態(tài)量,估計(jì)算法有擴(kuò)展卡爾曼濾波(EKF)、無跡卡爾曼濾波、容積卡爾曼濾波等[7-9]。非線性濾波算法可以抑制觀測誤差對定姿精度的影響。然而姿態(tài)估計(jì)算法精度非常依賴系統(tǒng)模型的建立,并且有穩(wěn)定性不好,易發(fā)散等問題。
為使上述兩類姿態(tài)確定算法實(shí)現(xiàn)優(yōu)勢互補(bǔ),本文提出一種基于改進(jìn)QUEST算法的兩步最優(yōu)估計(jì)算法,將確定性算法QUEST和估計(jì)算法EKF相結(jié)合。不僅可以利用QUEST算法處理星敏感器數(shù)據(jù),降低姿態(tài)確定系統(tǒng)的非線性程度,還可以利用EKF估計(jì)出星敏感器的測量誤差和陀螺漂移。并且因?yàn)镼UEST算法無法判斷姿態(tài)四元數(shù)的正負(fù),導(dǎo)致輸出的四元數(shù)不連續(xù),這里對QUEST算法進(jìn)行了改進(jìn)。
2 陀螺及星敏感器測量模型
陀螺量測方程為
ωg=ω+d+ηg
(1)
式(1)中,ωg為陀螺的輸出,d為陀螺漂移,ηg為陀螺的測量噪聲,一般視為高斯白噪聲。陀螺的漂移d滿足:
(2)
式(2)中,ηd為高斯白噪聲。
星敏感器測量得到的是恒星的方向矢量,采用準(zhǔn)直型探測器孔徑成像或者調(diào)制型編碼成像技術(shù)。假設(shè)衛(wèi)星上的安裝的探測器系統(tǒng)由鏡筒和CCD陣列敏感器器件組成,定義探測器平面的中心點(diǎn)為測量坐標(biāo)系的原點(diǎn)Om;OmZm軸指向脈沖星方向,為探測器中心主軸;OmXm軸垂直于OmZm軸,指向CCD行掃描方向;OmYm軸與另外兩軸構(gòu)成右手坐標(biāo)系Omxmymzm,如圖1所示。
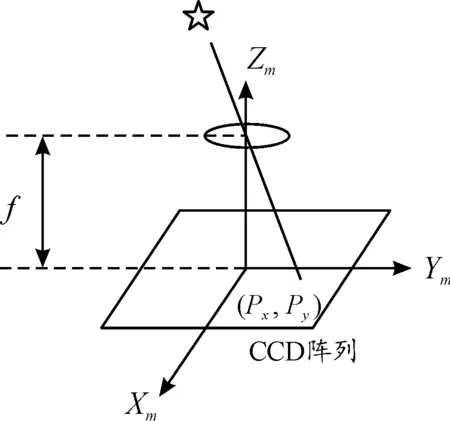
圖1 星光成像幾何關(guān)系示意圖
恒星在星敏感器測量坐標(biāo)系下的單位星光矢量m為
(3)
式(3)中,f為鏡筒焦距,(px,py)為星光矢量在CCD陣面上的坐標(biāo)。
由于衛(wèi)星星體坐標(biāo)系到星敏感器坐標(biāo)系的安裝矩陣已知,設(shè)為Cbm,所以可以得到恒星在星體坐標(biāo)系下的單位星光矢量b為
b=Cbmm
恒星在慣性坐標(biāo)系下的單位參考矢量r為
(4)
式(4)中,α、δ為恒星的赤經(jīng)、赤緯。
b、r之間的關(guān)系如下:
b=Cbir+ε
(5)
式(5)中,Cbi是衛(wèi)星本體坐標(biāo)系當(dāng)對于慣性坐標(biāo)系的轉(zhuǎn)換矩陣,ε為星敏感器的測量誤差。
3 星敏感器/陀螺組合的衛(wèi)星姿態(tài)確定算法
姿態(tài)確定算法原理如圖2所示,將星敏感器測得的矢量信息經(jīng)過QUEST算法預(yù)處理后得到的衛(wèi)星姿態(tài)四元數(shù),與陀螺狀態(tài)更新后所得的姿態(tài)四元數(shù),作四元數(shù)差得到的誤差四元數(shù),以此作為 EKF的量測值。

圖2 衛(wèi)星姿態(tài)確定原理
3.1 改進(jìn)的QUEST算法
由1.2節(jié)可知星敏感器是通過測量得到恒星在星體坐標(biāo)系下的星光矢量來求取姿態(tài)的。Wahba將這類基于矢量觀測求解衛(wèi)星姿態(tài)的問題描述為在最小二乘意義下,求解最優(yōu)正交姿態(tài)矩陣的問題,即求解使Wahba損失函數(shù)
(6)

定義增益函數(shù)g(A):
g(A)=1-L(A)=tr[ABT]
(7)
式(7)中,tr代表的是矩陣的跡,矩陣B為
那么求解衛(wèi)星姿態(tài)問題就轉(zhuǎn)化為求解使g(A)最大的正交矩陣。Davenport引入四元數(shù)q[10]:
(8)
g(q)=qTKq
(9)
式(9)中,K是4×4維矩陣:
那么求解出使得g(q)最大的四元數(shù)q即求得衛(wèi)星的姿態(tài)。經(jīng)證明滿足條件的最優(yōu)四元數(shù)即為矩陣K最大特征值所對應(yīng)的特征向量,即:
Kqopt=λmaxqopt
然而,因?yàn)閝和-q都是K的最優(yōu)特征向量,即:
K(-q)=λmax(-q)
無法判定四元數(shù)的正負(fù),即不能得到一個連續(xù)的四元數(shù)輸出,也沒有辦法使用誤差四元數(shù)進(jìn)行工程上的其他應(yīng)用。為了解決這種問題,根據(jù)冪法求解特征向量的原理[11]。如果K的最大特征值是唯一的,并且有最大的絕對值,那么它可以寫成
(10)
式(10)中,p為模為1的隨機(jī)四維列向量。對式(10)進(jìn)行離散化,可得:
(11)
式(11)中,k=1,2,3,…,初始四元數(shù)q0=p也是一個隨機(jī)向量,對于標(biāo)準(zhǔn)正交的A,可以寫出K的特征分解:
K=VDV-1
(12)
式(12)中,D=diag(λ1,λ2,λ3,λ4),且λ1≤λ2≤λ3≤λ4,V是按順序?qū)儆谒刑卣髦档奶卣飨蛄拷M成。根據(jù)Mortari的文獻(xiàn)[12]可以得到-1<λ1≤λ2≤λ3<λ4≈1,那么:
Vdiag(0,0,0,1)V-1=qqT
最終的連續(xù)解表示為
qk=qqTqk-1,qk=qk/|qk|
即:
qk=sign(qTqk-1)q
(13)
式(13)中,sign(·)表示取符號。這里的qk是最優(yōu)四元數(shù)的標(biāo)量,這表明連輸四元數(shù)在Wahba最小二乘的意義上是最優(yōu)的,但對于四元數(shù)的選擇是連續(xù)的。
3.2 系統(tǒng)狀態(tài)模型
基于星敏感器/陀螺的衛(wèi)星姿態(tài)確定系統(tǒng)的主要思路是用星敏感器得到的高精度的姿態(tài)信息來補(bǔ)償陀螺的漂移。這里用四元數(shù)來描述衛(wèi)星姿態(tài),四元數(shù)姿態(tài)動力學(xué)方程為
(14)
定義誤差四元數(shù)和誤差角速度:
(15)
(16)

取系統(tǒng)狀態(tài)量δX=[δq13,δd]T,那么系統(tǒng)狀態(tài)方程為
(17)
將狀態(tài)方程進(jìn)行離散化處理,可以得到離散狀態(tài)方程:
δXk=Φk-1δXk-1+Gk-1Wk-1
(18)
式(18)中,Φk-1=1+F(t-1)T,T為采樣時間。
3.3 系統(tǒng)量測模型
星敏感器的輸出為觀測星在衛(wèi)星星體坐標(biāo)系的方向矢量。QUEST算法要求至少要得到2個不同的觀測星在衛(wèi)星星體坐標(biāo)系的方向矢量,本文假設(shè)在星敏感器視野內(nèi)有至少兩顆可觀測星。本文利用2個觀測星測得方向矢量,通過改進(jìn)QUEST算法計(jì)算得到衛(wèi)星四元數(shù)。本文的觀測量為星敏感器的測量殘差,定義量測量:
(19)
式(19)中,qpre根據(jù)式(14)預(yù)測得到,qstar為利用星敏感器的測量數(shù)據(jù)計(jì)算得到姿態(tài)四元數(shù),根據(jù)式(13)計(jì)算得到。因?yàn)榱繙y數(shù)據(jù)是離散的,所以系統(tǒng)的量測方程為
δZk=HkδXk+Vk
(20)
3.4 算法流程
根據(jù)狀態(tài)方程式(18)和量測方程式(20),使用EKF進(jìn)行衛(wèi)星姿態(tài)確定的流程如下:利用k-1時刻的狀態(tài)量得到k時刻的狀態(tài)量過程如下:
1)根據(jù)k時刻星敏感器的測量值,利用改進(jìn)的QUEST算法,計(jì)算得到k時刻的量測四元數(shù)(qstar)k。

3)根據(jù)式(20)計(jì)算量測誤差量δZk,進(jìn)行狀態(tài)更新:
其中,Rk為系統(tǒng)量測噪聲矩陣。
4 仿真試驗(yàn)及結(jié)果分析
由圖3和圖4對比可知,由于星敏感器測量精度很高,QUEST算法可以求得高精度姿態(tài)四元數(shù),但是它無法判斷四元數(shù)的正負(fù),就出現(xiàn)了圖4所示的情況,與真實(shí)姿態(tài)四元數(shù)符號相反和輸出不連續(xù)的問題。而經(jīng)過改進(jìn)之后如圖3所示,可以準(zhǔn)確判斷姿態(tài)四元數(shù)的正負(fù),輸出連續(xù)的四元數(shù)。

圖3 改進(jìn)QUEST算法求得姿態(tài)四元數(shù)與真值曲線

圖4 QUEST算法求得姿態(tài)四元數(shù)與真值曲線
基于星敏感器/陀螺的衛(wèi)星定姿仿真結(jié)果如圖5、圖6所示。其中紅色曲線表示從4 000 s開始出現(xiàn)1 min陀螺儀數(shù)據(jù)丟失情況時的仿真結(jié)果。

圖5 基于星敏感器/陀螺的衛(wèi)星姿態(tài)誤差曲線

圖6 基于星敏感器/陀螺的衛(wèi)星角速度誤差曲線
由圖5、圖6可以看出:無論是姿態(tài)角誤差還是角速度誤差,都能以較快的速度收斂至0,姿態(tài)角誤差估計(jì)精度達(dá)到0.003°、角速度誤差估計(jì)精度達(dá)到0.03°/h,并且短時間的陀螺儀數(shù)據(jù)丟失對衛(wèi)星定姿的影響不大。
5 結(jié)論
本文針對遙感衛(wèi)星對于高精度姿態(tài)信息的需求,提出了一種星敏感器/陀螺組合的衛(wèi)星姿態(tài)確定算法。首先改進(jìn)QUEST算法,準(zhǔn)確判斷四元數(shù)的正負(fù),從而輸出連續(xù)的四元數(shù)。將星敏感器所得的星光矢量經(jīng)過改進(jìn)QUEST算法處理后得到的姿態(tài)四元數(shù)作為EKF的量測數(shù)據(jù),修正陀螺的漂移。通過數(shù)值仿真驗(yàn)證了此算法可以使系統(tǒng)獲得較高的姿態(tài)估計(jì)精度。
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級版)(2015年4期)2015-04-29 00:00:00
