無人機傾斜攝影技術在山區公路選線中的應用
2021-11-08 09:42:42王全勇
天津建設科技 2021年5期
王全勇
(浙江景文高速公路有限公司,浙江 杭州 310006)
隨著建設規模持續擴大,我國公路建設逐漸轉入工程條件更為復雜的山區。山區公路工程建設最顯著的特點就是既有道路嚴重缺乏,無法滿足施工要求,需要大量建設臨時施工便道。施工便道在選址上經常位于懸崖、深谷以及河流之間,容易遭遇山體滑坡和泥石流等地質災害,而作為公路橋梁工程前期施工準備階段極其重要的一環,施工便道關系到施工各環節中的機械設備、材料和人員有效、安全的進出,決定著整個項目建設過程中能否順利進行。
施工便道的修建線路是否安全、合理、經濟,是以獲取精確的山區實地信息為前提的。在無人的山區環境,地形圖中數據信息精確度只能參考,無法精確的為便道選型設計所用。通常情況下,施工單位多采用傳統的人工攜帶全站儀結合實地步行勘測的方式獲取地形信息,不但工作量巨大,而且常常因山區惡劣的地形條件導致人員無法到達進行測繪,數據準確度大大受限。
本文以溧陽—寧德高速公路(G4012)浙江景寧—文成段(以下簡稱“景文高速”)為依托,提出基于無人機的傾斜攝影模式完成三維實景建模的方法,為施工便道的選型提供精準的技術支持[1~2]。
1 工程概況
景文高速中的某大橋主跨位于V形峽谷,橋臺兩頭直接與隧道相接,橋址兩側地形陡峭,谷底分布坡洪積碎塊石,夾雜大滾石。橋址建設區所處深山老林溝壑發育,溝壑峽谷深達20~60 m、寬達80~200 m,兩側陡坡一般在30°~70°,為高山溝谷,兩側岸坡深切,施工位置上下高差巨大,既有道路全無。
在如此復雜的地形環境條件下,合理選取橋梁的施工便道對工程進度、安全和經濟至關重要。
2 影像采集方案的確定
2.1 無人機傾斜攝影技術原理及特點
2.1.1 原理
近年來,無人機航拍技術不斷創新和更迭,傾斜攝影測量相關新技術也得到了較快發展[3]。該技術顛覆了以往常規航拍攝影使用正字法采集角度進行影像拍攝的方式;利用多角度相機,以大范圍視角、高分辨率、高清晰的模式,多角度感知鏡頭下方地貌物體,同時獲取多角度鏡頭。通過設計采集區的飛行航線并進行參數設定,實現無人機的自主航拍數據采集,在飛行航線區設置像控點,最終通過像控點的RTK坐標信息、無人機采集的影像信息和POS信息等進行后期的圖形計算及空中三角測量、密集匹配、自動紋理映射一系列處理形成三維模型,真實反映并符合人們生活中真實的視覺場景,場景中附有地理信息框架,可全面的展示豐富的坐標、高程、距離等地理信息[4~5],大大提高用戶的真實體驗,同時經濟性極高。
2.1.2 特點
1)所采集到的影像能讓用戶全方位多視角的觀測地物,更加真實的瀏覽地物實際情況,大大彌補了以往無人機航拍照片中單一角度影像所提供信息的不足。
2)通過使用功能豐富的配套軟件,可在航拍采集過程中收集地物的坐標、高度、長度、面積、角度、坡度等數據,在后期的成果模型中直接獲得。
3)具有可批量化圖像數據處理及貼紋理的特點,能快速標準化的完成三維實景建模工作,大大降低建模成本。
2.2 影像采集
2.2.1 設備選型
可選用市場上技術較為穩定的主流品牌。本項目選擇的是大疆單鏡頭多旋翼無人機,加裝了GPS接收機、高精度IMU進行高度集成,外形尺寸中等,是目前市場上最智能的民用無人機之一,可根據機型選擇大疆配套的飛行控制軟件。使用前,對飛機進行飛行前校核與設定,飛行控制軟件在航拍時可選取的模式有二維地圖合成、虛擬護欄、測繪航拍區域模式、測繪航拍環繞模式、航點飛行指定航線;后期三維處理軟件選用的是Pix4D mapper、contextcapture(smart3d)。
2.2.2 航行方案
在飛行控制軟件界面里選擇測繪航拍區域模式,進入界面后首先進行航行區域范圍的選擇確定。本工程飛行總長度為2 137.6 m,其對應的參數設定如下:飛行高度120 m,飛行相機傾斜角度45°,航向重疊度80%,旁向重疊度70%,飛行速度5 m/s。
2.2.3 實地飛行影像采集
實地飛行應選擇能見度良好并且五級以下風的常溫天氣,在橋址附近選取一塊適合起飛的平地,在軟件界面中設定中心位置,規劃出630 m×430 m的矩形范圍為飛行區域。在中心區域相應的位置進行像控點的布設,飛行完畢后所采集到的影像資料和POS信息資料會分別記錄在無人機上各自內置的存儲卡內,在后續的內業數據處理時從存儲卡中提取即可。
3 施工便道選線
3.1 三維實景模型建立
無人機傾斜攝影航拍采集到影像數據和POS等數據信息后,使用Pix4D mapper、contextcapture(smart3d)軟件進行數據處理。將這些照片和數據導入到建模軟件中,通過計算機圖形計算,結合POS信息的空三處理,生成點云,點云構成格網,格網結合照片生成賦有真實紋理的三維實景模型。見圖1。
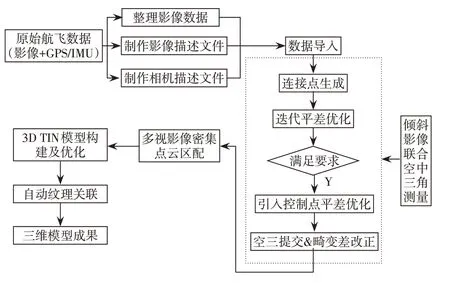
圖1 三維模型軟件構建流程
3.2 選線應用
基于三維實景模型不僅可直觀瀏覽各角度地形地貌情況,還可從中提取各點位之間的坐標、高差、距離以及高程等關鍵數據。在獲取關鍵地形地貌數據后,使用3Dmax、BIM或CAD等軟件在確定的施工圖中進行便道規劃設計。
3.2.1 布置原則
1)滿足功能需求:便道須承擔施工所用的鋼材、水泥、砂石、汽柴油、土方等材料的進出運輸功能;同時還需擔負施工所用的大型機械如塔吊、吊車、鉆機等機械和作業人員生產、生活的進出運輸功能。
2)因地制宜:應根據現場自然地貌條件進行規劃,結合地勢展開,便道線形盡量選取平而順和短而直的,在保證有充足視距的條件下便道不宜過長,結合當地環境盡量就地取材完成路基結構并對路面結構進行一定程度抗滑處理,提高便道通行過程中的安全性。
3)安全、環保、經濟、便捷:盡量利用既有道路,避免額外增加土地征用并且充分考慮就地取材應用于路基的鋪設,節約材料成本,減少對周邊生態環境的破壞;如果既有路全無,則需在滿足施工要求的前提下盡量做到因地制宜,以達到安全、環保、經濟和便捷的要求。
3.2.2 選線布置
山區公路橋梁工程中施工便道選線設計重點工作有兩點:一個是平縱線形的選取,另一個是橫斷面的精細化設計。精細化設計提出所需要的關鍵參數后,采用CNCCBIM Open R oads軟件對無人機傾斜攝影的地形數據進行提取轉化,基于三角網構建原理,使用Delaunay軟件對區域地形的模型進行編輯,將模型中的各種點云數據、地形數據的文件進行讀取收集,提取所需的高程、高差、距離以及坐標等數據信息。
根據建設標準,便道坡度一般情況下≯8%~10%,特殊地段的縱坡≯15%。根據以往經驗可知,便道縱坡>15%時,不利于材料、機械設備的安全運輸,同時還會增加機械設備的損耗成本;因此在設計過程中將縱坡控制在15%以內,保證材料、機械設備運輸的安全和順暢,同時還要結合車輛轉彎半徑的需求進行設計。見圖2。
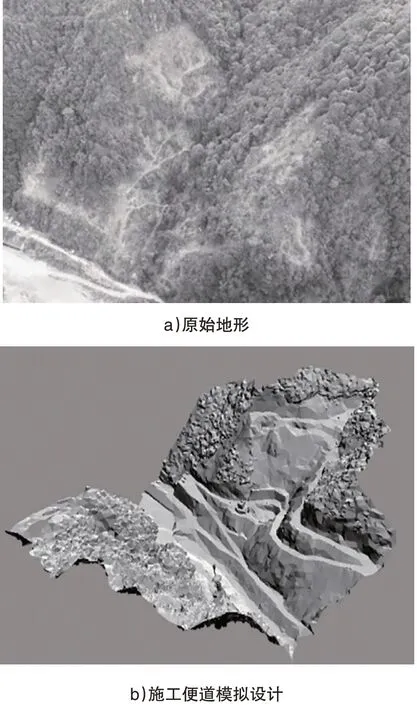
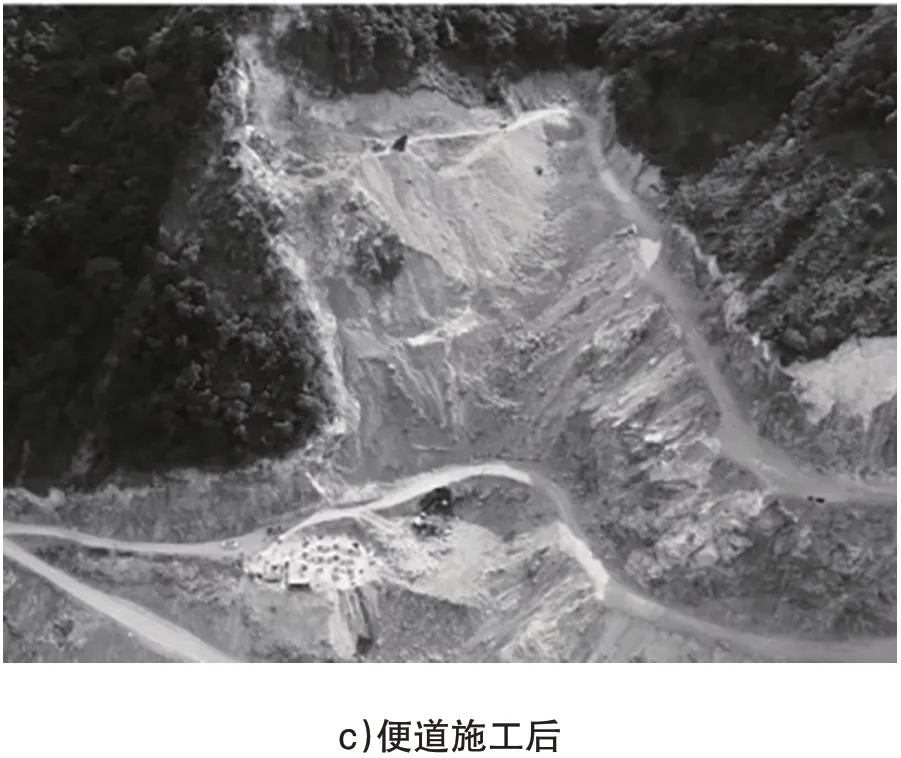
圖2 施工便道選線設計文件
基于上述方式進行的便道選線布置設計,所得出的實景模型便道線路設計誤差可控制在5 cm以內,不僅為便道施工線路提供了精準的設計,同時也為便道施工的土方工程量提供精確計算的基礎。
4 結語
基于無人機傾斜攝影技術結合現有常用的制圖軟件進行山區公路橋梁工程中的臨時施工便道選線設計更加快速準確,建立的三維實景模型更加直觀便捷。該技術還可以應用于隧道洞門場地的布置以及橋梁高墩施工安全管理等。
隨著無人機傾斜攝影技術的不斷發展,與相關行業內軟件技術的匹配會越來越便捷,在推動山區公路橋梁工程施工新技術應用方面會有更大發展,為工程建設帶來更高效、安全、經濟的效益。□■
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
建材發展導向(2021年9期)2021-07-16 07:11:36
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
中國房地產業(2016年2期)2016-03-01 01:25:48
河南電力(2016年5期)2016-02-06 02:11:34
