基于改進(jìn)BP神經(jīng)網(wǎng)絡(luò)的雷達(dá)剩余雜波抑制方法
2021-11-08 01:59:08施端陽(yáng)
兵器裝備工程學(xué)報(bào) 2021年10期
施端陽(yáng),林 強(qiáng),胡 冰,陳 蕾
(1.空軍預(yù)警學(xué)院,武漢 430019;2.中國(guó)人民解放軍95174部隊(duì),武漢 430040)
1 引言
由于雷達(dá)工作環(huán)境的復(fù)雜性,雷達(dá)回波信號(hào)中包含大量的地物、氣象、海洋等雜波和各種干擾。傳統(tǒng)的信號(hào)處理技術(shù),如動(dòng)目標(biāo)顯示、動(dòng)目標(biāo)檢測(cè)和恒虛警率等,對(duì)雷達(dá)回波信號(hào)進(jìn)行檢測(cè)后,不能完全濾除雜波,仍會(huì)存在大量的剩余雜波。這些剩余雜波不僅會(huì)形成虛假點(diǎn)跡,影響航跡的質(zhì)量,還可能會(huì)導(dǎo)致數(shù)據(jù)處理系統(tǒng)飽和,影響雷達(dá)探測(cè)性能的發(fā)揮。因此,對(duì)信號(hào)處理后的剩余雜波進(jìn)行有效抑制具有重要的研究意義。
目前,國(guó)內(nèi)外對(duì)剩余雜波抑制方法的研究取得了一些成果。文獻(xiàn)[1]提出了基于AdaBoost的雷達(dá)剩余雜波抑制方法,該方法運(yùn)用自適應(yīng)提升算法構(gòu)造決策樹(shù)分類(lèi)器,通過(guò)組合多個(gè)基學(xué)習(xí)器的結(jié)果對(duì)目標(biāo)和雜波進(jìn)行分類(lèi),解決了弱學(xué)習(xí)器在特征不明顯的雜波點(diǎn)跡上表現(xiàn)不佳的問(wèn)題。文獻(xiàn)[2]提出了一種基于徑向基神經(jīng)網(wǎng)絡(luò)的海雜波抑制方法,通過(guò)改進(jìn)的IGWO算法進(jìn)行優(yōu)化,解決了GWO算法收斂速度慢,易陷入局部?jī)?yōu)化的不足,對(duì)海雜波具有較好的抑制作用。文獻(xiàn)[3]針對(duì)復(fù)雜天氣條件下,氣象雷達(dá)雜波抑制效果差的問(wèn)題,提出了一種基于模糊神經(jīng)網(wǎng)絡(luò)的雜波抑制方法,利用神經(jīng)網(wǎng)絡(luò)訓(xùn)練得到地雜波各極化參數(shù)的隸屬函數(shù),該方法的識(shí)別結(jié)果更符合地雜波寬分布和非均勻分布的特性,對(duì)地雜波抑制起到了較好的效果。文獻(xiàn)[4]綜合考慮了目標(biāo)與雜波在幅度、相位、距離等特征的差異,利用綜合特征因子評(píng)估過(guò)濾雜波,降低了虛假航跡率和點(diǎn)跡損失率。但該方法在綜合特征因子求取時(shí),加權(quán)因子的確定依賴經(jīng)驗(yàn)值,影響了算法的運(yùn)算效率和雜波抑制效果。文獻(xiàn)[5]提出了一種基于雜波圖的雜波抑制方法,分別對(duì)單部雷達(dá)和組網(wǎng)雷達(dá)進(jìn)行雜波抑制。但該方法需要對(duì)雜波區(qū)域進(jìn)行判別、劃分,根據(jù)不同雜波區(qū)選取不同的判別門(mén)限,在組網(wǎng)時(shí)要考慮不同雷達(dá)的融合權(quán)值,計(jì)算過(guò)程較為復(fù)雜。文獻(xiàn)[6]在研究了雷達(dá)信號(hào)處理中的動(dòng)目標(biāo)顯示和動(dòng)目標(biāo)檢測(cè)2種雜波抑制技術(shù)的基礎(chǔ)上,應(yīng)用了K近鄰算法對(duì)目標(biāo)和雜波進(jìn)行判別,但是該方法的雜波剩余點(diǎn)跡抑制率不到70%,雜波點(diǎn)跡識(shí)別率還有待提高。文獻(xiàn)[7]設(shè)計(jì)了5層BP神經(jīng)網(wǎng)絡(luò)分類(lèi)器,采用L-M算法對(duì)分類(lèi)器進(jìn)行訓(xùn)練,較K近鄰算法和支持向量機(jī)提高了分類(lèi)精度。但是該方法的神經(jīng)網(wǎng)絡(luò)過(guò)于復(fù)雜,識(shí)別時(shí)間較長(zhǎng),不太適用于雷達(dá)剩余雜波的快速識(shí)別。
本文針對(duì)現(xiàn)有BP神經(jīng)網(wǎng)絡(luò)算法學(xué)習(xí)速度慢,雜波識(shí)別率較低的問(wèn)題,提出了一種改進(jìn)的BP神經(jīng)網(wǎng)絡(luò)抑制雜波的方法。選取多普勒速度、目標(biāo)原始幅度、雜噪比等8個(gè)特征作為輸入,設(shè)計(jì)雷達(dá)點(diǎn)跡分類(lèi)器,引入彈性BP算法提高神經(jīng)網(wǎng)絡(luò)的收斂速度,并對(duì)網(wǎng)絡(luò)結(jié)構(gòu)進(jìn)行優(yōu)化。結(jié)果表明,改進(jìn)后的BP神經(jīng)網(wǎng)絡(luò)算法既節(jié)省了識(shí)別時(shí)間,也提升了雜波抑制的效果。
2 BP神經(jīng)網(wǎng)絡(luò)
BP神經(jīng)網(wǎng)絡(luò)是一種由輸入層、隱含層和輸出層組成的多層前饋網(wǎng)絡(luò)[8-9]。BP神經(jīng)網(wǎng)絡(luò)的隱含層數(shù)量和各層的節(jié)點(diǎn)數(shù)可以是一個(gè)或者多個(gè),一個(gè)包含單個(gè)隱含層的BP神經(jīng)網(wǎng)絡(luò)可以實(shí)現(xiàn)M維到N維的非線性映射,如圖1所示[10]。

圖1 BP神經(jīng)網(wǎng)絡(luò)示意圖
BP神經(jīng)網(wǎng)絡(luò)各層之間全連接,同一層的神經(jīng)元相互不連接。在BP神經(jīng)網(wǎng)絡(luò)中,數(shù)據(jù)按照輸入層-隱含層-輸出層的順序,逐層向后傳播。在對(duì)網(wǎng)絡(luò)的權(quán)值進(jìn)行訓(xùn)練時(shí),沿著誤差減小的方向,按照反向順序,逐層向前修正權(quán)值,通過(guò)多次的學(xué)習(xí)訓(xùn)練,最終的誤差逐漸縮小至符合要求的范圍,此時(shí)神經(jīng)網(wǎng)絡(luò)訓(xùn)練完成。

(1)
網(wǎng)絡(luò)的期望輸出為:
d(s)=[d1,d2,…,dJ]
(2)
2.1 工作信號(hào)正向傳播
神經(jīng)網(wǎng)絡(luò)中輸入層的節(jié)點(diǎn)數(shù)為輸入向量的維數(shù),輸入層的輸出為神經(jīng)網(wǎng)絡(luò)的輸入信號(hào)。假設(shè)輸入信號(hào)為x(s),則輸入層第m個(gè)神經(jīng)元的輸出為:
(3)
隱含層第i個(gè)神經(jīng)元的輸入為:
(4)
假設(shè)隱含層傳遞函數(shù)為f(·),則隱含層第i個(gè)神經(jīng)元的輸出為:

(5)
輸出層第n個(gè)神經(jīng)元的輸入為:
(6)
假設(shè)輸出層傳遞函數(shù)為g(·),則輸出層第n個(gè)神經(jīng)元的輸出為:

(7)
輸出層第n個(gè)神經(jīng)元的誤差為:
(8)
神經(jīng)網(wǎng)絡(luò)的總誤差為:
(9)
2.2 誤差信號(hào)反向傳播
神經(jīng)網(wǎng)絡(luò)在調(diào)整權(quán)值時(shí),按照網(wǎng)絡(luò)逐層反向調(diào)整。隱含層與輸出層之間的權(quán)值調(diào)整為:
ωin(s+1)=ωin(s)+Δωin(s)
(10)
輸入層與隱含層之間的權(quán)值調(diào)整為:
ωmi(s+1)=ωmi(s)+Δωmi(s)
(11)
式中,Δωin(s)、Δωmi(s)分別為隱含層與輸出層之間和輸入層與隱含層之間的權(quán)值調(diào)整量,其大小取決于訓(xùn)練算法。
3 改進(jìn)前后的BP神經(jīng)網(wǎng)絡(luò)模型
BP神經(jīng)網(wǎng)絡(luò)包含訓(xùn)練和學(xué)習(xí)2個(gè)過(guò)程[11]。網(wǎng)絡(luò)訓(xùn)練時(shí),數(shù)據(jù)通過(guò)輸入層進(jìn)入網(wǎng)絡(luò),然后傳遞至隱含層各神經(jīng)元,數(shù)據(jù)經(jīng)過(guò)傳遞函數(shù)變換后傳遞到輸出層輸出。當(dāng)實(shí)際輸出值與期望值誤差較大時(shí),誤差反向經(jīng)過(guò)隱含層傳遞到輸入層,傳遞時(shí)將誤差分配至每一層,各層的神經(jīng)元權(quán)值根據(jù)誤差進(jìn)行調(diào)整,直至滿足訓(xùn)練停止條件。網(wǎng)絡(luò)學(xué)習(xí)時(shí),先對(duì)網(wǎng)絡(luò)進(jìn)行初始化設(shè)置,分配連接權(quán)值,確定學(xué)習(xí)次數(shù)、誤差函數(shù)。然后輸入訓(xùn)練數(shù)據(jù),計(jì)算隱含層的輸入輸出,調(diào)整權(quán)值。最后計(jì)算全局誤差,直至誤差滿足停止條件[12]。
BP神經(jīng)網(wǎng)絡(luò)的設(shè)計(jì)包含網(wǎng)絡(luò)層數(shù)、輸入層節(jié)點(diǎn)數(shù)、隱含層節(jié)點(diǎn)數(shù)、輸出層節(jié)點(diǎn)數(shù)、傳遞函數(shù)、訓(xùn)練方法和訓(xùn)練參數(shù)設(shè)置等內(nèi)容[13]。
3.1 經(jīng)典BP神經(jīng)網(wǎng)絡(luò)模型
1)網(wǎng)絡(luò)層數(shù)
BP神經(jīng)網(wǎng)絡(luò)包含一個(gè)或多個(gè)隱含層。文獻(xiàn)[7]中構(gòu)建了5層神經(jīng)網(wǎng)絡(luò),其中包含一個(gè)輸入層、3個(gè)隱含層和一個(gè)輸出層。
2)輸入層節(jié)點(diǎn)數(shù)
輸入層的節(jié)點(diǎn)數(shù)取決于輸入數(shù)據(jù)的維數(shù)。文獻(xiàn)[7]中選取的數(shù)據(jù)特征為方位、距離、信噪比、幅度、方位跨度和距離跨度等6維特征,因此輸入層節(jié)點(diǎn)數(shù)為6個(gè)。
3)隱含層節(jié)點(diǎn)數(shù)
文獻(xiàn)[7]中第1個(gè)隱含層有10個(gè)節(jié)點(diǎn),第2個(gè)隱含層有20個(gè)節(jié)點(diǎn),第3個(gè)隱含層有10個(gè)節(jié)點(diǎn)。
4)輸出層節(jié)點(diǎn)數(shù)
輸出層的節(jié)點(diǎn)數(shù)取決于輸出數(shù)據(jù)的維數(shù)。在雷達(dá)剩余雜波抑制的過(guò)程中,需要根據(jù)BP神經(jīng)網(wǎng)絡(luò)來(lái)識(shí)別雷達(dá)點(diǎn)跡為目標(biāo)還是雜波,輸出數(shù)據(jù)為一維數(shù)據(jù),因此輸出層節(jié)點(diǎn)數(shù)為1個(gè)。
5)傳遞函數(shù)和訓(xùn)練參數(shù)
BP神經(jīng)網(wǎng)絡(luò)的傳遞函數(shù)必須可微[14]。文獻(xiàn)[7]中隱含層傳遞函數(shù)為tansig函數(shù),輸出層為logsig函數(shù)。
6)訓(xùn)練方法
標(biāo)準(zhǔn)BP神經(jīng)網(wǎng)絡(luò)的訓(xùn)練算法為最速下降法,但該算法的收斂速度慢,易陷入局部極小。文獻(xiàn)[7]中采用了L-M算法,使訓(xùn)練速度得到了一定的提升。
3.2 本文改進(jìn)BP神經(jīng)網(wǎng)絡(luò)模型
1)網(wǎng)絡(luò)層數(shù)
文獻(xiàn)[7]中構(gòu)建的網(wǎng)絡(luò)結(jié)構(gòu)過(guò)于復(fù)雜,導(dǎo)致雷達(dá)點(diǎn)跡判別耗時(shí)較長(zhǎng),無(wú)法快速抑制雜波。經(jīng)理論證實(shí),單個(gè)隱含層結(jié)構(gòu)的網(wǎng)絡(luò)可以實(shí)現(xiàn)任意非線性映射[15]。因此,本文構(gòu)建了3層BP神經(jīng)網(wǎng)絡(luò),包含一個(gè)輸入層、一個(gè)隱含層和一個(gè)輸出層,簡(jiǎn)化了網(wǎng)絡(luò)結(jié)構(gòu),提高了模型的識(shí)別速度。
2)輸入層節(jié)點(diǎn)數(shù)
本文選取的數(shù)據(jù)特征為多普勒速度、目標(biāo)原始幅度、目標(biāo)背景幅度、濾波標(biāo)志、恒虛警類(lèi)型、雜噪比、濾波器組選擇和EP質(zhì)量等8維特征,因此輸入層節(jié)點(diǎn)數(shù)為8個(gè)。
3)隱含層節(jié)點(diǎn)數(shù)
隱含層的節(jié)點(diǎn)數(shù)對(duì)BP神經(jīng)網(wǎng)絡(luò)的性能影響巨大,隱含層節(jié)點(diǎn)數(shù)增多可以提高網(wǎng)絡(luò)的性能,但也會(huì)延長(zhǎng)訓(xùn)練時(shí)間。文獻(xiàn)[7]中設(shè)計(jì)隱含層節(jié)點(diǎn)數(shù)時(shí)未給出設(shè)計(jì)的依據(jù),存在一定的隨意性。本文隱含層節(jié)點(diǎn)數(shù)采取下式確定:
(12)
式中,M和N分別為輸入層和輸出層節(jié)點(diǎn)數(shù),a是[0,10]之間的常數(shù)。本文中輸入層和輸出層節(jié)點(diǎn)數(shù)分別為8個(gè)和1個(gè),a取值為10,因此隱含層節(jié)點(diǎn)數(shù)為13個(gè)。
4)輸出層節(jié)點(diǎn)數(shù)
本文中,網(wǎng)絡(luò)輸出為0或1的一維數(shù)據(jù),0代表該雷達(dá)點(diǎn)跡識(shí)別為雜波,1代表該雷達(dá)點(diǎn)跡識(shí)別為目標(biāo),因此輸出層節(jié)點(diǎn)數(shù)為1個(gè)。
5)傳遞函數(shù)和訓(xùn)練參數(shù)
本文選用Tan-Sigmoid函數(shù)為隱含層傳遞函數(shù),線性函數(shù)purelin函數(shù)為輸出層傳遞函數(shù)。網(wǎng)絡(luò)學(xué)習(xí)率為0.01,目標(biāo)誤差為10-7,最大迭代次數(shù)為1 000次。
6)訓(xùn)練方法
文獻(xiàn)[7]中采用了L-M算法,模型的識(shí)別時(shí)間仍然較長(zhǎng),識(shí)別率較低。本文引入彈性BP算法,以提高神經(jīng)網(wǎng)絡(luò)的訓(xùn)練速度和識(shí)別率。彈性BP算法在調(diào)整權(quán)值時(shí),僅使用了偏導(dǎo)的符號(hào),而未使用偏導(dǎo)的幅值,這樣權(quán)值的調(diào)整量就與幅值無(wú)關(guān),可消除梯度幅度的不良影響。權(quán)值調(diào)整量的大小由下式?jīng)Q定:
(13)
權(quán)值的調(diào)整遵循以下原則,如果偏導(dǎo)為正,則權(quán)值減小,如果偏導(dǎo)為負(fù),則權(quán)值增加。下一次迭代的權(quán)值調(diào)整量為:

(14)
式中,Δin(s)為權(quán)值的調(diào)整步長(zhǎng),Δin(s)∈[Δmin,Δmax],0<η-<1<η+為調(diào)整系數(shù)。
與以學(xué)習(xí)率為基礎(chǔ)的其他算法不同的是,彈性BP算法直接修改調(diào)整權(quán)值,因此不會(huì)導(dǎo)致因?yàn)闊o(wú)法預(yù)期的梯度變化而使修改后的網(wǎng)絡(luò)性能下降。當(dāng)訓(xùn)練發(fā)生振蕩時(shí),彈性BP算法的權(quán)值調(diào)整量將減小,在多次迭代中權(quán)值朝相同方向變化時(shí),權(quán)值調(diào)整量增大。因此,彈性BP算法的收斂速度更快。
3.3 BP神經(jīng)網(wǎng)絡(luò)訓(xùn)練與分類(lèi)
將雷達(dá)點(diǎn)跡訓(xùn)練數(shù)據(jù)輸入設(shè)計(jì)好的BP神經(jīng)網(wǎng)絡(luò)中進(jìn)行訓(xùn)練,當(dāng)分類(lèi)精度滿足要求時(shí),網(wǎng)絡(luò)訓(xùn)練完成。將雷達(dá)點(diǎn)跡測(cè)試數(shù)據(jù)輸入訓(xùn)練好的網(wǎng)絡(luò)中,通過(guò)輸出識(shí)別雷達(dá)點(diǎn)跡為目標(biāo)還是雜波,若識(shí)別為雜波,則濾除該點(diǎn)跡,以達(dá)到抑制雜波的目的。
文中所提雷達(dá)剩余雜波抑制方法的流程如圖2所示。

圖2 基于BP神經(jīng)網(wǎng)絡(luò)的雷達(dá)剩余雜波抑制流程框圖
4 實(shí)驗(yàn)結(jié)果與分析
采集某型空管雷達(dá)的30 000個(gè)點(diǎn)跡實(shí)測(cè)數(shù)據(jù),選取24 000個(gè)作為訓(xùn)練樣本,其中目標(biāo)點(diǎn)跡和雜波點(diǎn)跡各12 000個(gè),剩余6 000個(gè)作為測(cè)試樣本,其中目標(biāo)點(diǎn)跡和雜波點(diǎn)跡各3 000個(gè)。數(shù)據(jù)分布如表1所示。

表1 數(shù)據(jù)分布
實(shí)驗(yàn)內(nèi)容分為2個(gè)部分,實(shí)驗(yàn)1通過(guò)設(shè)計(jì)的BP神經(jīng)網(wǎng)絡(luò)測(cè)試不同特征組合時(shí)的雷達(dá)點(diǎn)跡識(shí)別率,選取最優(yōu)的特征組合作為點(diǎn)跡識(shí)別模型的輸入數(shù)據(jù);實(shí)驗(yàn)2將本文提出的方法與文獻(xiàn)[7]中的方法進(jìn)行對(duì)比分析。
4.1 最優(yōu)特征組合的選取
從采集的雷達(dá)點(diǎn)跡特征中選取8個(gè)特征進(jìn)行測(cè)試,分別為:多普勒速度、目標(biāo)原始幅度、目標(biāo)背景幅度、濾波標(biāo)志、恒虛警類(lèi)型、雜噪比、濾波器組選擇和EP質(zhì)量。對(duì)單個(gè)特征或者多個(gè)特征組合時(shí)BP神經(jīng)網(wǎng)絡(luò)模型的識(shí)別率進(jìn)行研究,不同特征下的識(shí)別率如表2所示。

表2 不同特征下的識(shí)別率(%)
由表2可知,在特征組合為“多普勒速度+目標(biāo)原始幅度+目標(biāo)背景幅度+濾波標(biāo)志+恒虛警類(lèi)型+雜噪比+濾波器組選擇+EP質(zhì)量”時(shí)模型的識(shí)別率最高,目標(biāo)識(shí)別率為82.4%,雜波識(shí)別率為84.6%,整體識(shí)別率為83.5%。因此,該組合為最優(yōu)特征組合。
4.2 2種方法對(duì)比
由最優(yōu)特征組合中特征的數(shù)量可知,BP神經(jīng)網(wǎng)絡(luò)的輸入數(shù)據(jù)維數(shù)為8維,因此輸入層節(jié)點(diǎn)數(shù)為8個(gè)。已知輸出層節(jié)點(diǎn)數(shù)為1,由式(12)可知,隱含層節(jié)點(diǎn)數(shù)范圍為[3,13]。經(jīng)過(guò)驗(yàn)證,隱含層節(jié)點(diǎn)為13時(shí)的效果最好。因此,本文的BP神經(jīng)網(wǎng)絡(luò)由8個(gè)節(jié)點(diǎn)的輸入層、13個(gè)節(jié)點(diǎn)的隱含層和1個(gè)節(jié)點(diǎn)的輸出層構(gòu)成。如圖3所示,本文設(shè)計(jì)的神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)比文獻(xiàn)[7]中的神經(jīng)網(wǎng)絡(luò)更加簡(jiǎn)單。

圖3 2種BP神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)示意圖
為了對(duì)比2種BP神經(jīng)網(wǎng)絡(luò)的識(shí)別時(shí)間和雜波抑制效果,采取相同的訓(xùn)練數(shù)據(jù)對(duì)2種BP神經(jīng)網(wǎng)絡(luò)進(jìn)行訓(xùn)練,利用相同的測(cè)試數(shù)據(jù)對(duì)訓(xùn)練好的模型分別進(jìn)行測(cè)試,得到的識(shí)別時(shí)間如圖4所示,均方誤差如圖5所示。

圖4 2種BP神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)識(shí)別時(shí)間界面
從圖4中可以看出,本文方法BP神經(jīng)網(wǎng)絡(luò)識(shí)別時(shí)間為4 s,文獻(xiàn)[7]中BP神經(jīng)網(wǎng)絡(luò)的識(shí)別時(shí)間為29 s,前者比后者的識(shí)別時(shí)間節(jié)省了86%。從圖5中可以看出,本文方法神經(jīng)網(wǎng)絡(luò)在迭代303次時(shí)均方誤差最低,誤差為0.117 49,文獻(xiàn)[7]中BP神經(jīng)網(wǎng)絡(luò)在迭代19次時(shí)的均方誤差最低,誤差為0.121 21,前者在更短的時(shí)間內(nèi)迭代次數(shù)更多且誤差下降更快最優(yōu)誤差更小。通過(guò)圖4和圖5可以說(shuō)明,本文方法收斂速度更快,精度更高,顯著提高了雷達(dá)點(diǎn)跡識(shí)別的效率,在雷達(dá)這種對(duì)情報(bào)實(shí)時(shí)性要求較高的裝備中,本文方法具有更好的適用性。

圖5 2種BP神經(jīng)網(wǎng)絡(luò)均方誤差曲線
圖6為3 000個(gè)測(cè)試樣本在分類(lèi)識(shí)別前的分布圖,橫坐標(biāo)為方位,縱坐標(biāo)為距離,綠色點(diǎn)代表目標(biāo)點(diǎn)跡,紅色點(diǎn)代表雜波點(diǎn)跡。

圖6 測(cè)試樣本空間分布圖
圖7為采取2種BP神經(jīng)網(wǎng)絡(luò)雜波抑制后的效果圖,前者為本文方法雜波抑制后的效果,后者為文獻(xiàn)[7]中方法雜波抑制后的效果。從圖6和圖7的對(duì)比中可以看出,采取2種BP神經(jīng)網(wǎng)絡(luò)后大部分雜波都被成功抑制。從圖7可以看出,在圓框內(nèi)的區(qū)域中,本文方法剩余的雜波點(diǎn)跡更少,雜波抑制的效果更好。

圖7 2種方法雜波抑制效果圖
2種方法的識(shí)別率如表3所示。由表3可知,本文方法比文獻(xiàn)[7]中方法雜波點(diǎn)跡識(shí)別率提升了1.6%,整體點(diǎn)跡識(shí)別率提升了0.2%,識(shí)別精度更高,雜波抑制效果更好。
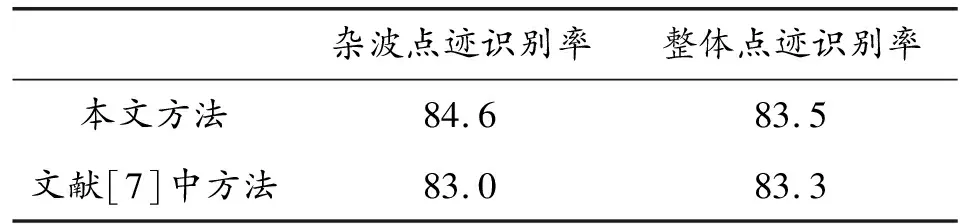
表3 2種方法的識(shí)別率(%)
5 結(jié)論
本文引入彈性BP算法,改進(jìn)現(xiàn)有的BP神經(jīng)網(wǎng)絡(luò)訓(xùn)練算法,提升了網(wǎng)絡(luò)收斂速度。通過(guò)分析隱含層的層數(shù)和節(jié)點(diǎn)數(shù),減少了現(xiàn)有神經(jīng)網(wǎng)絡(luò)中隱含層層數(shù)和節(jié)點(diǎn)數(shù)的數(shù)量,簡(jiǎn)化了BP神經(jīng)網(wǎng)絡(luò)的結(jié)構(gòu),提高了雷達(dá)點(diǎn)跡識(shí)別率。通過(guò)計(jì)算雷達(dá)實(shí)測(cè)數(shù)據(jù),證明本文提出的雷達(dá)剩余雜波抑制方法,不僅縮短了識(shí)別時(shí)間,也提高了雜波的抑制效果,對(duì)雷達(dá)裝備在實(shí)際工作中快速高效地抑制剩余雜波具有指導(dǎo)作用。
