平衡偏癱下肢康復訓練器設計
2021-11-07 10:32:17馮超馬早
科技信息·學術版 2021年22期
馮超 馬早

摘要:本文采用穿戴式外骨骼機械結構,設計一款用于偏癱患者進行康復訓練及助行的裝置。為了使患者在訓練和行走時更好的步態和協調平衡能力,在控制上通過采樣患者的健肢的運動信息進行識別處理,來控制患肢的運動。
關鍵詞:外骨骼 編碼器 偏癱 伺服電機 步態
1.背景
我國現有各類殘疾人員8296萬人,占我國人口6.34%,其中下肢體殘疾2412萬人,所占比重29.1%,現在下肢殘疾患者中,由中風引起的偏癱居多,據數據顯示,中國每年新發中風的病人超過200萬[1],其中80%以上的患者會留下一側肢體癱瘓的癥狀,給其身心帶來了雙重傷害,給獨立生活帶來困難,也給家庭社會帶來較大的負擔。這部分患者可以通過科學的、正確的康復訓練能夠回復到正常。
作為康復訓練來講,一是要由科學的訓練方法和步驟,二是要有有效的訓練器械。傳統的訓練是通過人工輔助和簡單的訓練器械進行的,其訓練強度,規范性都受到較大的制約,最終導致患者達不到希望的訓練效果,甚至造成患者步態發生嚴重的變化,使患者失去康復的信心,造成終生殘疾。設計有效的偏癱下肢康復訓練器是必要的。
偏癱下肢康復訓練器使用時,穿戴在患者的肢體上,通過電動機械結構使患者相應關節反復衩動屈伸,持續被動運動可以刺激關節,使其生理性關節液產生良性循環,減輕關節腫脹,可防止或治療因創傷或運動不足等原因導致或可能導致的關節運動幅度減小,關節僵硬和靜脈栓塞[2]等。
2.功能要求
1)被動單肢運動,平衡行走,起坐;主動單肢運動行走。
2)被動控制模式下,具有速度,步幅,步頻可調。
3)具有運動信息的采集、存儲。
4)具有三重安全保護措施和應急措施。
5)體積小穿戴使用方便,使患者康復訓練不受時間地點限制。
3.結構組成
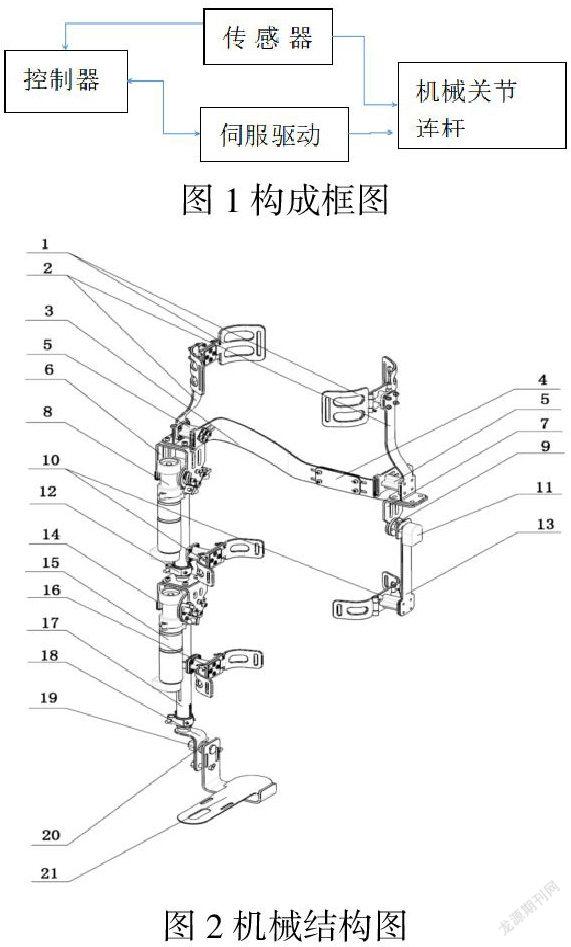
偏癱下肢康復訓練器依托穿戴式外骨骼結構設計的,其主要構成部分為:控制器,伺服驅動,傳感器、機械關節連桿等四部分構成。其構成框圖(圖一)和機械結構(見圖二)
伺服系統:是由直流伺服電機(120w空心杯直流電極),增量式光電編碼器(500線),伺服電機驅動器(CAN總線驅動),減速器(諧波減速機40:1)構成,主要完成在控制器的作用下對髖關節、膝關節進行驅動。
機械關節連桿:主要由髖關節,膝關節,踝關節,腰托,上枝條,腳托,大小腿連桿,腿托等構成,這些連桿是由關節連在一起形成外骨骼,使用時通過胸托,腰托,大小腿托,腳托捆綁在患者的下肢上,在控制系統的作用下,通過伺服系統驅動關節轉動,帶動患者肢體運動。為了適應不同的患者使用,腰托,大小腿連桿的尺寸都是可調節的;每個關節都設計有運動范圍(角度)安全保護裝置,以保護患者使用時的人身安全。
傳感器:傳感器是由扭力傳感器、光電傳感器、肌張力構成,其作用一是作為訓練效果的測評,二是對出現的痙攣進行檢測和保護;三是檢測運動狀態信息為運動控制提供依據。
控制器:由嵌入式單片機(STM32)成承擔,完成對信息的采集、處理和對運動進行控制。
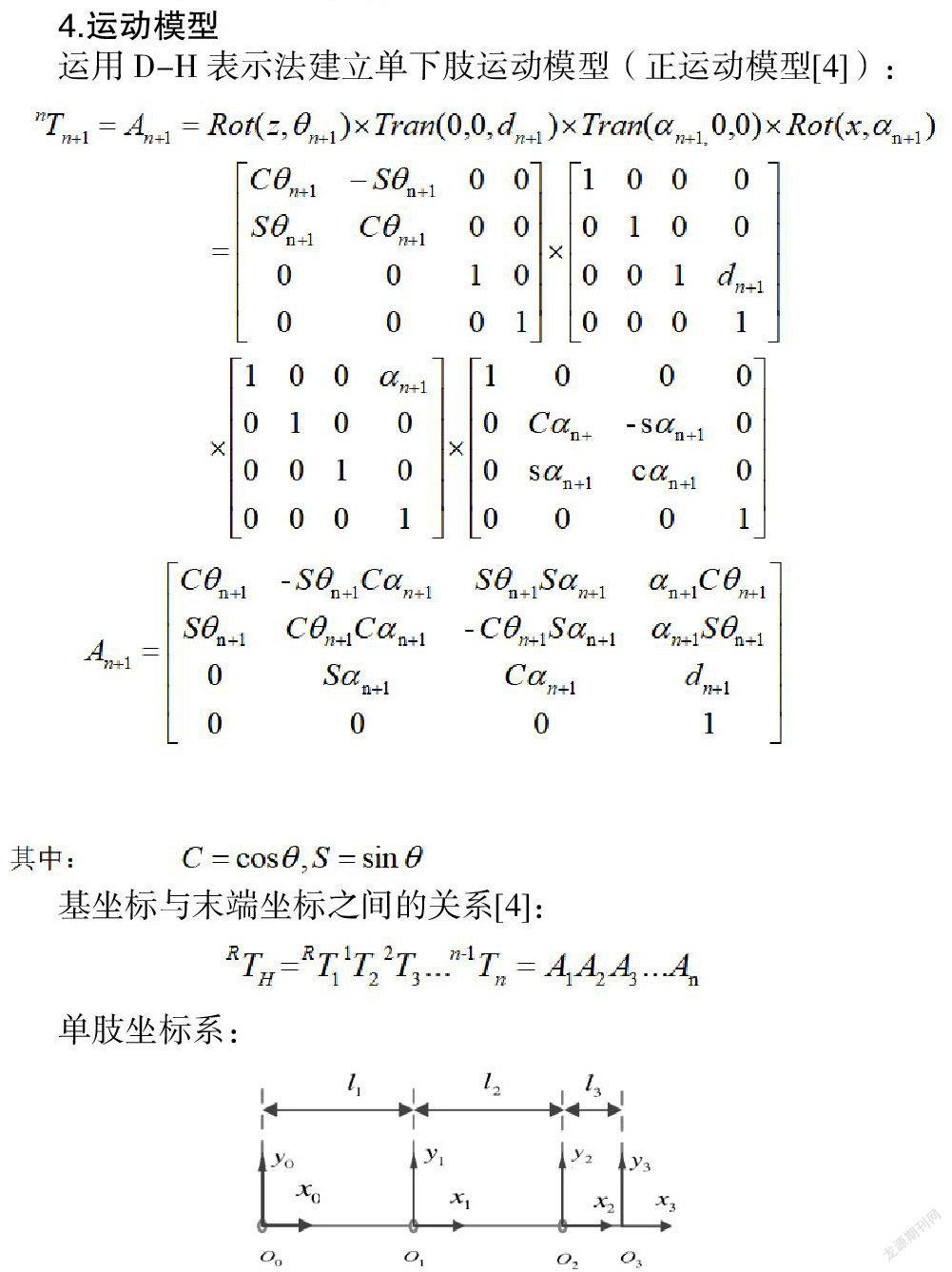
4.運動模型
運用D-H表示法建立單下肢運動模型(正運動模型[4]):
通過求解矩陣,就可以得到末端的位姿。
運動學的逆解:給定末端的運動位置和姿態,求解各關節的運轉角度。設末端的坐標為(xp,yp),姿態角ɑ=θ1+θ2+θ3,確定各關節的角度θ,其位姿矩陣為[3]:
在已知末端坐標和姿態角及連桿參數下,求解位姿矩陣,就可得到各關節的運動角度,在求解時,得到的解可能有多個,這時要根據各關節運動參數范圍來確定。
4.步態分析
根據人的下肢行走時與地面接觸情況,將人的行走過程分為[2]:承重反應期(0-15%)、站立中期(15%-40%)、站立末期(40%-50%)、邁步前期(50%-60%)、邁步初期(60%-70%)、邁步中期(70%-85%)、邁步末期(85%-100%)。
步態分析的目的就是根據步態不同區間建立該區間的動力模型,以確定控制系統輸出的驅動信息,達到驅動肢體運動的目的。
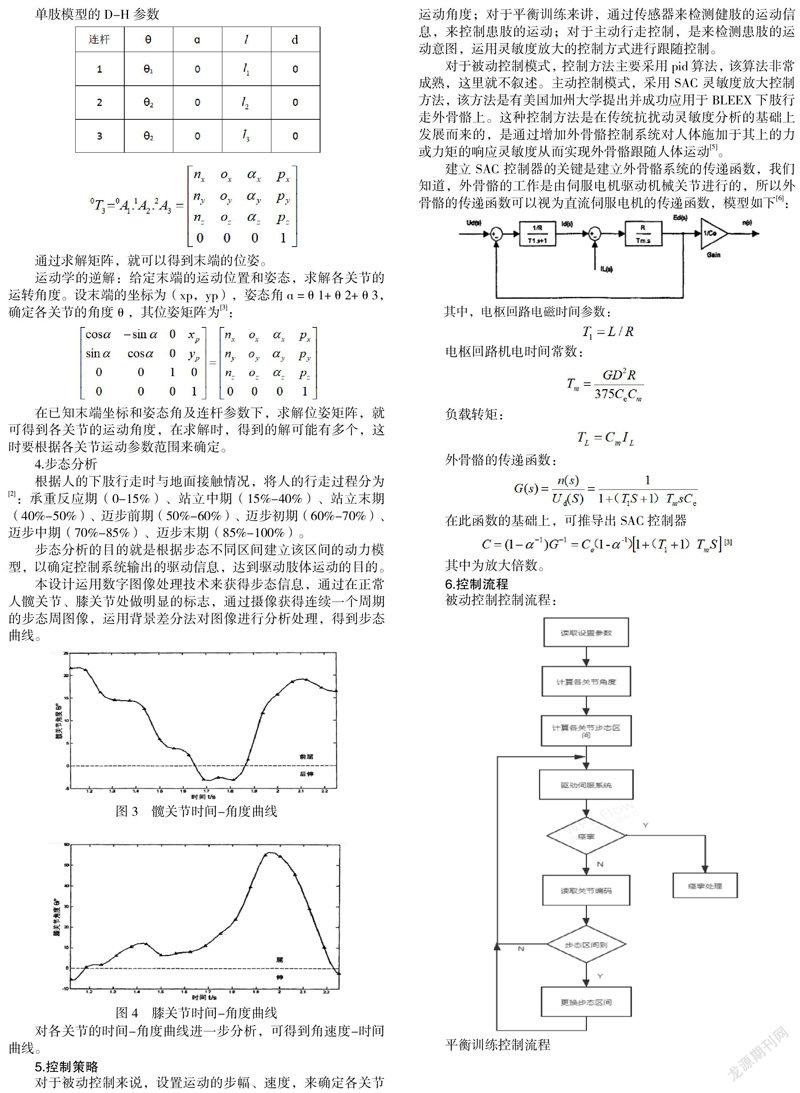
本設計運用數字圖像處理技術來獲得步態信息,通過在正常人髖關節、膝關節處做明顯的標志,通過攝像獲得連續一個周期的步態周圖像,運用背景差分法對圖像進行分析處理,得到步態曲線。
對各關節的時間-角度曲線進一步分析,可得到角速度-時間曲線。
5.控制策略
對于被動控制來說,設置運動的步幅、速度,來確定各關節運動角度;對于平衡訓練來講,通過傳感器來檢測健肢的運動信息,來控制患肢的運動;對于主動行走控制,是來檢測患肢的運動意圖,運用靈敏度放大的控制方式進行跟隨控制。
對于被動控制模式,控制方法主要采用pid算法,該算法非常成熟,這里就不敘述。主動控制模式,采用SAC靈敏度放大控制方法,該方法是有美國加州大學提出并成功應用于BLEEX下肢行走外骨骼上。這種控制方法是在傳統抗擾動靈敏度分析的基礎上發展而來的,是通過增加外骨骼控制系統對人體施加于其上的力或力矩的響應靈敏度從而實現外骨骼跟隨人體運動[5]。
建立SAC控制器的關鍵是建立外骨骼系統的傳遞函數,我們知道,外骨骼的工作是由伺服電機驅動機械關節進行的,所以外骨骼的傳遞函數可以視為直流伺服電機的傳遞函數,模型如下[6]:
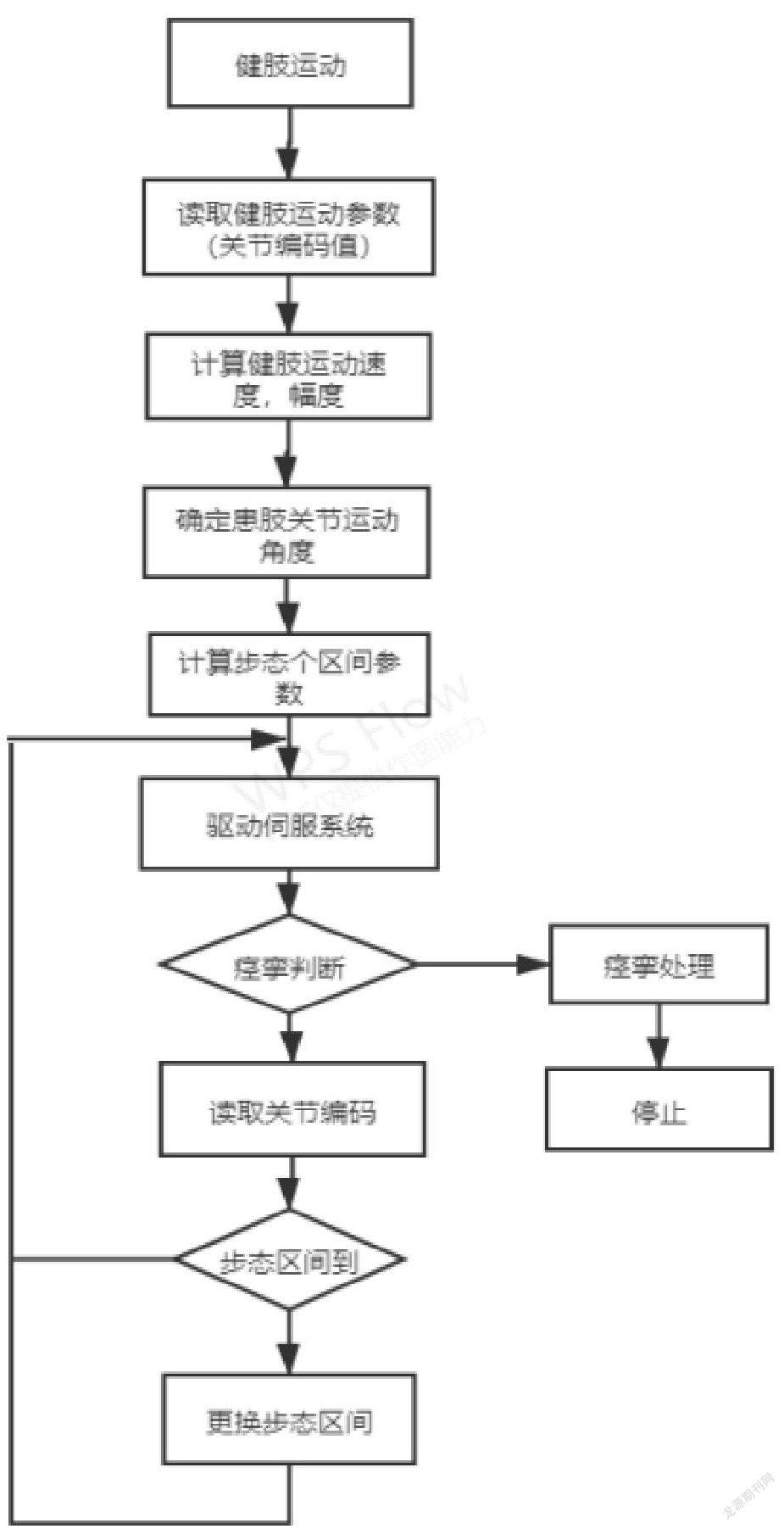
6.控制流程
7.總結
本文論述了平衡偏癱下肢康復訓練器的組成、模型以及控制原理和流程;設計了被動、平衡、主動3種訓練模式,以更好地適用偏癱患者的訓練;尤其是用健肢運動狀態來控制患肢的運動,使患者更好的掌握平衡,步態更趨于合理;主動模式采用了具有自學習能力的ASC控制方法,使患者訓練時能感到舒適,自然。
參考文獻:
[1]我國康復機器人的現狀 、機遇和未來,賢集網2021-06-16
[2]蔡廣文等編著.中風康復訓練手冊,世界圖書出版公司,2009-10-1
[3]張宏亮.外骨骼式老年人輔助行走裝置設計研究,南京理工大學學位論文,2011.3
[4]董慧穎.機器人原理與技術,機械工業出版社2014年9
[5]Kazerooni H.,Racine J.-L.,Huag Lihua,Steger R.,On the Control of the Berkeley Lower Extremity Exoskeleton (BLEEX)[J].Proceedings of the 2005 IEEE Intermationgal Conference on Robotcs and Automation.2005,4;18-22
[6]留錦波,張承惠。電機與拖動[M].北京:清華大學出版社,2006
作者簡介:
馮超,1987.10,陜西西安人,男,漢,本科,研究方向:機電設備設計與實施,職稱:電氣工程師。
馬早,1988.07,女,漢,河南 鄭州人,本科,研究方向:機電設備運行與管理,職稱:機械助理工程師。