數(shù)據(jù)缺失下的短時(shí)交通流預(yù)測(cè)①
2021-11-05 03:38:26徐東偉何德峰
高技術(shù)通訊 2021年9期
關(guān)鍵詞:模型
徐東偉 彭 鵬 何德峰
(*浙江工業(yè)大學(xué)網(wǎng)絡(luò)空間安全研究院 杭州310023)
(**浙江工業(yè)大學(xué)信息工程學(xué)院 杭州310023)
0 引言
隨著城市交通出行需求的不斷增長(zhǎng),快速而有效的未來(lái)交通狀態(tài)評(píng)估對(duì)于緩解交通擁堵、提高交通路網(wǎng)運(yùn)行效率等具有著重要意義。短時(shí)交通流預(yù)測(cè)作為一種有效的未來(lái)交通狀態(tài)評(píng)估方法,其預(yù)測(cè)結(jié)果不僅能夠幫助人們規(guī)劃更為合理的出行路線,還可以幫助交通管理部門制定更為科學(xué)的交通治理方案和采取更為有效的交通管控手段。
為了實(shí)現(xiàn)實(shí)時(shí)、準(zhǔn)確的短時(shí)交通流預(yù)測(cè),國(guó)內(nèi)外研究學(xué)者們提出了大量的交通流預(yù)測(cè)方法和模型。這些預(yù)測(cè)模型通常可以分為參數(shù)模型和非參數(shù)模型。常見的參數(shù)模型有自回歸差分移動(dòng)平均模型[1]、卡爾曼濾波模型[2]、隱馬爾可夫模型[3]等。相比于參數(shù)模型,非參數(shù)模型沒有固定模型參數(shù)和固定模型結(jié)構(gòu)的約束,因此有著更優(yōu)秀的數(shù)據(jù)學(xué)習(xí)能力和表達(dá)能力。常見的非參數(shù)模型有支持向量機(jī)(support vector machine,SVM)模型[4]、K 最近鄰(knearest neighbor,KNN)模型[5]、決策樹模型[6]、神經(jīng)網(wǎng)絡(luò)模型[7-9]、深度學(xué)習(xí)模型[10]等。
相比于其他模型,深度學(xué)習(xí)模型不僅有著靈活的模型設(shè)計(jì),還有著強(qiáng)大的海量數(shù)據(jù)深層特征學(xué)習(xí)能力。因此,越來(lái)越多的深度學(xué)習(xí)模型被提出并用于解決短時(shí)交通流預(yù)測(cè)問(wèn)題。文獻(xiàn)[11]基于深度信念網(wǎng)絡(luò)(deep belief networks,DBN)實(shí)現(xiàn)了交通流的多種任務(wù)預(yù)測(cè)。文獻(xiàn)[12] 構(gòu)建堆棧自編碼(stacked auto encoder,SAE)模型,實(shí)現(xiàn)了大數(shù)據(jù)下的短期交通流預(yù)測(cè)。文獻(xiàn)[13]提出了一種基于長(zhǎng)短期記憶神經(jīng)網(wǎng)絡(luò)(long short-term memory,LSTM)的短期交通流預(yù)測(cè)模型。文獻(xiàn)[14]提出了一種基于卷積神經(jīng)網(wǎng)絡(luò)(convolutional neural network,CNN)的短期交通流預(yù)測(cè)模型。文獻(xiàn)[15]提出了一種基于圖卷積網(wǎng)絡(luò)(graph convolutional network,GCN)的交通流預(yù)測(cè)模型。文獻(xiàn)[16]使用時(shí)空注意力神經(jīng)網(wǎng)絡(luò)完成了短時(shí)交通流的預(yù)測(cè)。除此之外,人們還提出了一些組合模型來(lái)進(jìn)一步提高交通流的預(yù)測(cè)精度。文獻(xiàn)[17]將一維卷積與LSTM 相結(jié)合,提出了基于卷積-長(zhǎng)短期記憶神經(jīng)網(wǎng)絡(luò)(convolutional LSTM,Conv-LSTM)的短期交通流預(yù)測(cè)模型。文獻(xiàn)[18]提出了一種CNN 與支持向量回歸(support vector regression,SVR)相組合的交通流預(yù)測(cè)模型。文獻(xiàn)[19]將CNN 與LSTM 相組合,進(jìn)一步提高了LSTM 的短時(shí)交通流預(yù)測(cè)精度。
隨著人們的不斷研究,交通流預(yù)測(cè)模型的預(yù)測(cè)精度相比過(guò)去已經(jīng)有了較大的提高,但是這些模型是以完整交通流數(shù)據(jù)為研究前提的。在實(shí)際生產(chǎn)生活中,檢測(cè)器故障、服務(wù)器檢修等現(xiàn)象均可導(dǎo)致不等程度的交通數(shù)據(jù)缺失問(wèn)題。針對(duì)上述問(wèn)題,主要采用的解決方法為先數(shù)據(jù)修復(fù)然后再預(yù)測(cè),但是該方法相比于直接預(yù)測(cè)而言過(guò)程較為復(fù)雜且數(shù)據(jù)修復(fù)的質(zhì)量將直接影響模型的預(yù)測(cè)精度。
生成式對(duì)抗網(wǎng)絡(luò)(generative adversarial network,GAN)作為一種新型的生成式深度學(xué)習(xí)模型,其通過(guò)數(shù)據(jù)分布學(xué)習(xí)與博弈機(jī)制即可生成圖片[20]、對(duì)話文本[21]等內(nèi)容,具有強(qiáng)大的數(shù)據(jù)生成能力。為此,本文采用GAN 主體框架,以缺失交通流數(shù)據(jù)作為輸入,借助全連接層、門控循環(huán)單元(gated recurrent unit,GRU)層的數(shù)據(jù)生成能力與多層全連接層的判別能力,實(shí)現(xiàn)數(shù)據(jù)缺失下短時(shí)交通流的直接預(yù)測(cè)。
1 GAN
1.1 原始GAN
2014 年,文獻(xiàn)[22]提出了一種基于博弈思想的生成式模型,即生成式對(duì)抗網(wǎng)絡(luò)GAN。該模型為日后各種GAN 的變體模型的提出奠定了深厚的基礎(chǔ),因此人們也將該模型稱之為原始GAN。GAN 作為一種新型的深度學(xué)習(xí)模型,其主要由生成網(wǎng)絡(luò)G和判別網(wǎng)絡(luò)D兩部分組成。GAN 的模型框架結(jié)構(gòu)如圖1 所示。
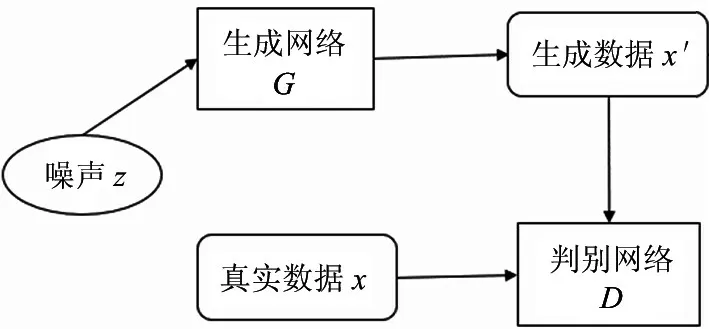
圖1 GAN 模型框架結(jié)構(gòu)圖
在GAN 中,生成網(wǎng)絡(luò)主要負(fù)責(zé)數(shù)據(jù)的生成,而判別網(wǎng)絡(luò)D則主要負(fù)責(zé)生成數(shù)據(jù)x′與真實(shí)數(shù)據(jù)x間的區(qū)分。當(dāng)噪聲樣本z輸入到GAN 中時(shí),首先生成網(wǎng)絡(luò)G基于噪聲z輸出生成數(shù)據(jù)x′,然后將生成數(shù)據(jù)x′與真實(shí)數(shù)據(jù)x輸入判別網(wǎng)絡(luò)D進(jìn)行真假數(shù)據(jù)的判別。
為了保證GAN 生成數(shù)據(jù)的質(zhì)量,GAN 的模型損失函數(shù)在生成網(wǎng)絡(luò)G與判別網(wǎng)絡(luò)D的博弈訓(xùn)練過(guò)程中對(duì)兩者均進(jìn)行了考慮。生成網(wǎng)絡(luò)損失函數(shù)LG、判別網(wǎng)絡(luò)損失函數(shù)LD計(jì)算方式分別如下:
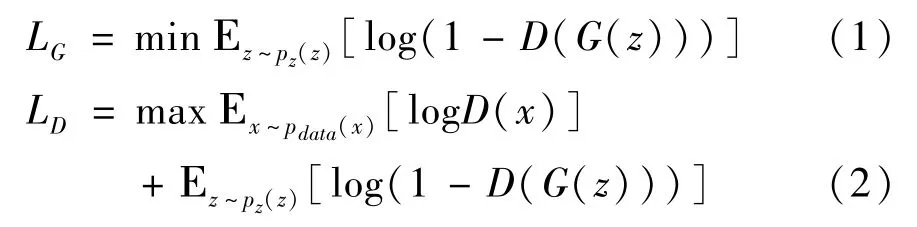
其中,z為隨機(jī)噪聲,x為真實(shí)數(shù)據(jù)。當(dāng)兩個(gè)網(wǎng)絡(luò)達(dá)到納什平衡時(shí),則GAN 模型訓(xùn)練完成。
雖然原始GAN 早期在圖像生成領(lǐng)域展現(xiàn)了出色的表現(xiàn),但是依舊存在訓(xùn)練過(guò)程中納什平衡難以維持、無(wú)法準(zhǔn)確反映模型訓(xùn)練程度、模型生成的數(shù)據(jù)樣本單一等問(wèn)題。為了有效解決原始GAN 的上述問(wèn)題,人們對(duì)GAN 的結(jié)構(gòu)、損失函數(shù)等進(jìn)行了改進(jìn),提出了一系列的GAN 的變體模型。
1.2 WGAN
針對(duì)原始GAN 存在的問(wèn)題,文獻(xiàn)[23]對(duì)原始GAN 進(jìn)行改進(jìn),提出了Wasserstein GAN(WGAN)。相比與原始GAN,WGAN 的改變主要包含以下幾個(gè)方面。
首先,在真假數(shù)據(jù)相似度衡量上,WGAN 采用Wasserstein 距離代替了GAN 中原有的JS 散度或KL 散度。Wasserstein 距離計(jì)算方式如下:

其中,Π(Pr,Pg) 為Pr和Pg的聯(lián)合分布的集合。相比JS 散度或KL 散度,Wasserstein 距離在數(shù)據(jù)樣本分布無(wú)重疊時(shí)依舊可以通過(guò)計(jì)算來(lái)反映兩個(gè)數(shù)據(jù)分布之間的有效距離。
其次,在網(wǎng)絡(luò)結(jié)構(gòu)上,WGAN 將GAN 中判別網(wǎng)絡(luò)中輸出層的激活函數(shù)sigmoid 進(jìn)行了刪除,使得判別網(wǎng)絡(luò)可以直接根據(jù)Wasserstein 距離計(jì)算衡量數(shù)據(jù)分布間的相似度,并有效避免了sigmoid 函數(shù)潛在的梯度消失問(wèn)題。
最后,在模型訓(xùn)練上,WGAN 在模型損失函數(shù)計(jì)算時(shí)不再進(jìn)行l(wèi)og 計(jì)算,在判別網(wǎng)絡(luò)參數(shù)更新過(guò)程添加了權(quán)重裁剪,并推薦使用RMSProp 優(yōu)化器進(jìn)行模型參數(shù)的求解。根據(jù)WGAN 的改變,WGAN 生成網(wǎng)絡(luò)損失函數(shù)LG、判別網(wǎng)絡(luò)損失函數(shù)LD的計(jì)算方式分別如下:

基于上述改進(jìn),WGAN 不僅有效解決了GAN在訓(xùn)練過(guò)程中存在的不穩(wěn)定問(wèn)題,明確了一個(gè)合理的數(shù)值去反映GAN 的訓(xùn)練進(jìn)程,還基本解決了GAN 的模式單一問(wèn)題,提高了生成數(shù)據(jù)的多樣性。
2 模型設(shè)計(jì)
2.1 模型結(jié)構(gòu)設(shè)計(jì)
GAN 及其變體在圖像、文本、視頻等諸多領(lǐng)域的成功不僅證明了其強(qiáng)大的數(shù)據(jù)生成能力,還說(shuō)明其具有一定的普適性。基于以上特性,針對(duì)數(shù)據(jù)缺失下的短時(shí)交通流預(yù)測(cè)問(wèn)題,本文提出了一種基于Wasserstein 生成式對(duì)抗網(wǎng)絡(luò)的短時(shí)交通流預(yù)測(cè)模型。該模型的框架結(jié)構(gòu)如圖2 所示。
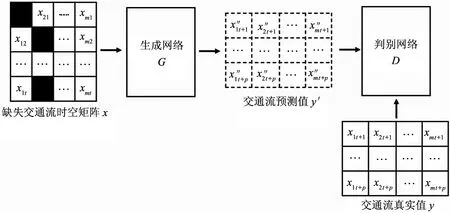
圖2 本文預(yù)測(cè)模型框架結(jié)構(gòu)圖
模型主要由生成網(wǎng)絡(luò)G和判別網(wǎng)絡(luò)D兩部分共同構(gòu)成,其輸入為數(shù)據(jù)缺失的交通流時(shí)空矩陣x,輸出為修復(fù)后的交通流時(shí)刻矩陣x′ 和預(yù)測(cè)的交通流量數(shù)據(jù)y′。假設(shè)第m條路段在第t時(shí)刻的真實(shí)交通流數(shù)據(jù)為xmt,修復(fù)后的交通流數(shù)據(jù)為,第m條路段在第t+p時(shí)刻的交通流預(yù)測(cè)值為,那么x、x′和y′分別表示如下:
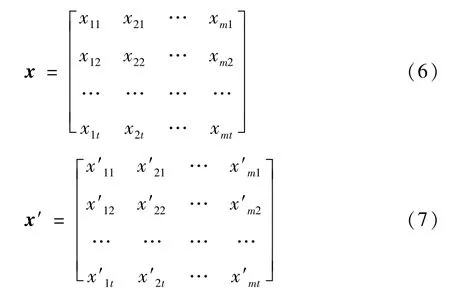
其中,m表示路段的數(shù)量,t表示交通流歷史數(shù)據(jù)窗口的大小,p表示交通流預(yù)測(cè)的窗口大小。
在該模型中,生成網(wǎng)絡(luò)G主要由輸入層、全連接層、GRU 層和輸出層構(gòu)成,其具體結(jié)構(gòu)設(shè)計(jì)如圖3所示。其中,輸入層、輸出層分別負(fù)責(zé)接收歷史交通流數(shù)據(jù)和輸出交通流預(yù)測(cè)結(jié)果,全連接層1 負(fù)責(zé)交通流數(shù)據(jù)的編碼,GRU 層負(fù)責(zé)交通流編碼結(jié)果的特征提取,全連接層2 負(fù)責(zé)GRU 層特征提取結(jié)果下的解碼。假設(shè)第t時(shí)刻的交通流數(shù)據(jù)集合為xt={x1t,x2t,…,xmt},那么生成網(wǎng)絡(luò)G計(jì)算過(guò)程的數(shù)學(xué)表達(dá)式如下:
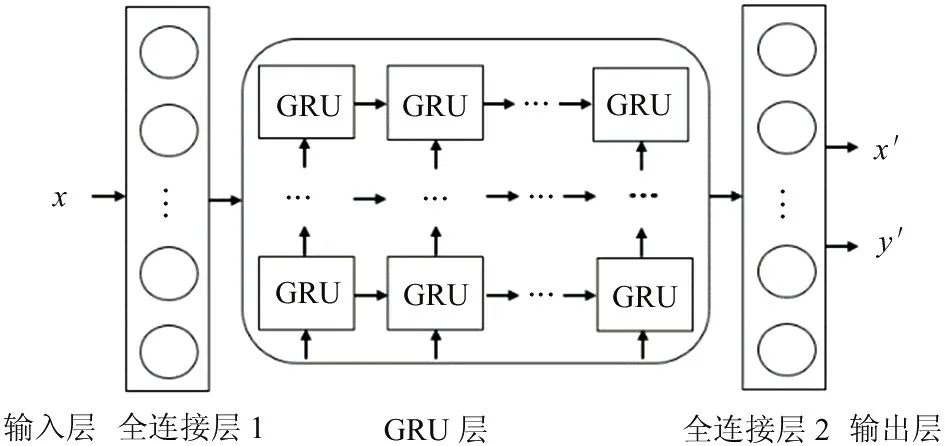
圖3 生成網(wǎng)絡(luò)框架結(jié)構(gòu)示意圖

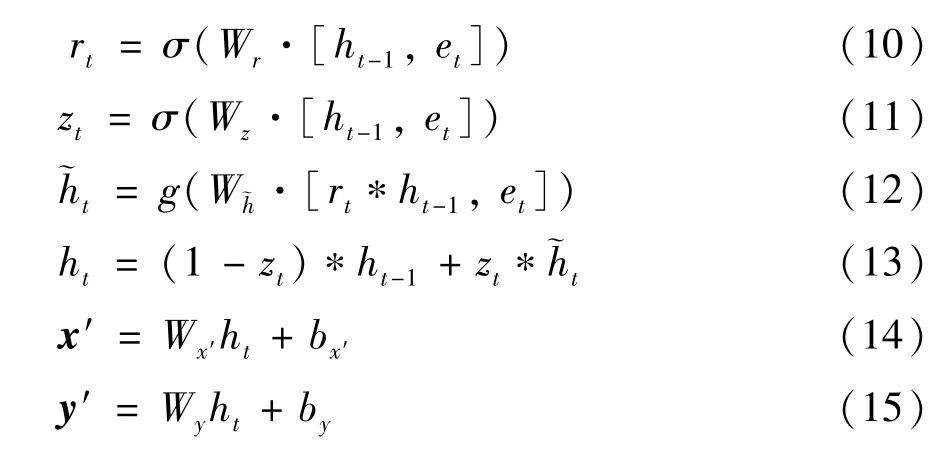
其中,·表示矩陣乘法運(yùn)算,[]表示向量相連操作,*表示矩陣的點(diǎn)乘運(yùn)算,et表示全連接層1 編碼輸出,rt、zt、ht和分別表示GRU 層中重置門、更新門、隱藏層和候選隱藏層的輸出。
相比于生成網(wǎng)絡(luò)G,判別網(wǎng)絡(luò)D主要負(fù)責(zé)生成交通流數(shù)據(jù)與真實(shí)交通流數(shù)據(jù)的區(qū)分,其主要由多層全連接層構(gòu)建而成。判別網(wǎng)絡(luò)D的結(jié)構(gòu)設(shè)計(jì)如圖4 所示。其中,d和d′分別表示在真實(shí)交通流數(shù)據(jù)和生成數(shù)據(jù)下判別網(wǎng)絡(luò)D的判別輸出。
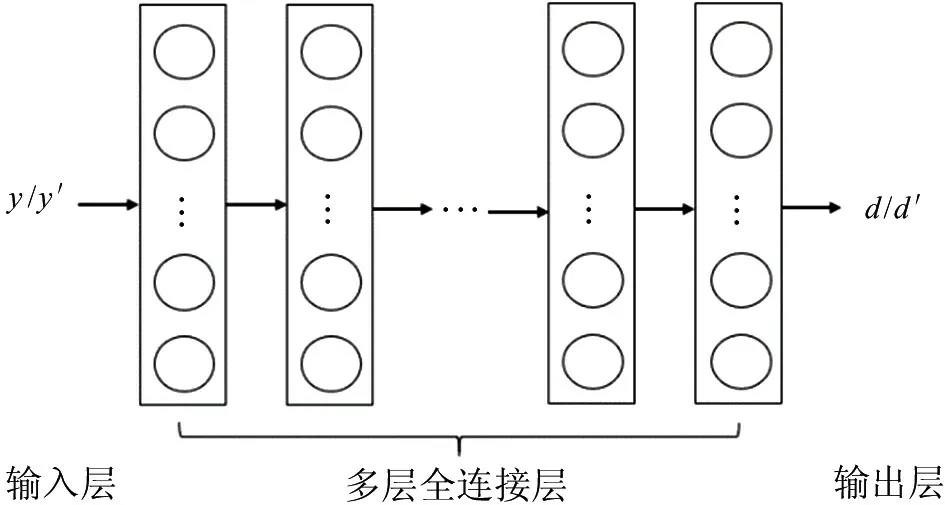
圖4 判別網(wǎng)絡(luò)框架結(jié)構(gòu)示意圖
2.2 模型損失函數(shù)設(shè)計(jì)
本文模型的損失函數(shù)設(shè)計(jì)主要包含生成網(wǎng)絡(luò)和判別網(wǎng)絡(luò)兩部分。生成網(wǎng)絡(luò)損失函數(shù)主要用于保證生成網(wǎng)絡(luò)輸出的交通流預(yù)測(cè)數(shù)據(jù)與真實(shí)的交通流數(shù)據(jù)在數(shù)據(jù)分布上盡可能地相似,而判別網(wǎng)絡(luò)損失函數(shù)則主要用于保證生成數(shù)據(jù)與真實(shí)交通流數(shù)據(jù)的有效區(qū)分。
生成網(wǎng)絡(luò)損失函數(shù)主要由基本生成損失函數(shù)、預(yù)測(cè)損失函數(shù)和數(shù)據(jù)修復(fù)損失函數(shù)3 部分組成。基本生成損失函數(shù)主要用于促使生成網(wǎng)絡(luò)盡可能地生成判別網(wǎng)絡(luò)無(wú)法區(qū)分真假的數(shù)據(jù)樣本。而預(yù)測(cè)損失函數(shù)可以在一定程度上保證生成的交通流數(shù)據(jù)的預(yù)測(cè)質(zhì)量。此外,在一定程度上,對(duì)于數(shù)據(jù)修復(fù)損失函數(shù)的考慮可以進(jìn)一步提高模型的預(yù)測(cè)性能。因此,生成網(wǎng)絡(luò)損失函數(shù)表示如下:

其中,x′表示修復(fù)后的交通流時(shí)刻矩陣,表示完整的交通流時(shí)刻矩陣,y表示交通流數(shù)據(jù)的真實(shí)值,y′表示交通流數(shù)據(jù)的預(yù)測(cè)值,-D(y′) 為基本生成損失函數(shù),(y′ -y)2為預(yù)測(cè)損失函數(shù),為修復(fù)損失函數(shù)。
判別網(wǎng)絡(luò)損失函數(shù)主要是對(duì)數(shù)據(jù)相似度的衡量,其表示如下:

3 實(shí)驗(yàn)過(guò)程及結(jié)果分析
3.1 實(shí)驗(yàn)數(shù)據(jù)
本文的實(shí)驗(yàn)數(shù)據(jù)來(lái)自美國(guó)加州交通運(yùn)輸性能測(cè)量系統(tǒng)。該系統(tǒng)包含了全加州高速公路中部署的15 000 多個(gè)交通檢測(cè)器的數(shù)據(jù),這些數(shù)據(jù)包括交通流量、速度、飽和度等重要交通參數(shù)。本文選取了其中4 個(gè)檢測(cè)器2016 年4 月1 日至4 月30 日工作日的交通流量數(shù)據(jù)作為實(shí)驗(yàn)數(shù)據(jù),數(shù)據(jù)采樣時(shí)間間隔為5 min。其中,前80%的實(shí)驗(yàn)數(shù)據(jù)作為模型的訓(xùn)練集,剩余的實(shí)驗(yàn)數(shù)據(jù)作為模型的測(cè)試集。
3.2 數(shù)據(jù)預(yù)處理
為了減少實(shí)驗(yàn)數(shù)據(jù)的實(shí)際量綱對(duì)模型訓(xùn)練速度和預(yù)測(cè)性能的影響,本文對(duì)實(shí)驗(yàn)數(shù)據(jù)進(jìn)行了標(biāo)準(zhǔn)化處理,將數(shù)據(jù)量綱控制在[0,1]之間。本文采用的數(shù)據(jù)標(biāo)準(zhǔn)化計(jì)算方式如下:

其中,x表示原始數(shù)據(jù),x*表示標(biāo)準(zhǔn)化的數(shù)據(jù),min(x) 與max(x) 分別表示原始數(shù)據(jù)中的最小值和最大值。
本文原始實(shí)驗(yàn)數(shù)據(jù)為完整的交通流量數(shù)據(jù)。為了有效模擬交通流數(shù)據(jù)不同程度的缺失,本文對(duì)原始實(shí)驗(yàn)數(shù)據(jù)進(jìn)行了隨機(jī)的數(shù)據(jù)缺失處理。數(shù)據(jù)缺失處理過(guò)程如圖5 所示。
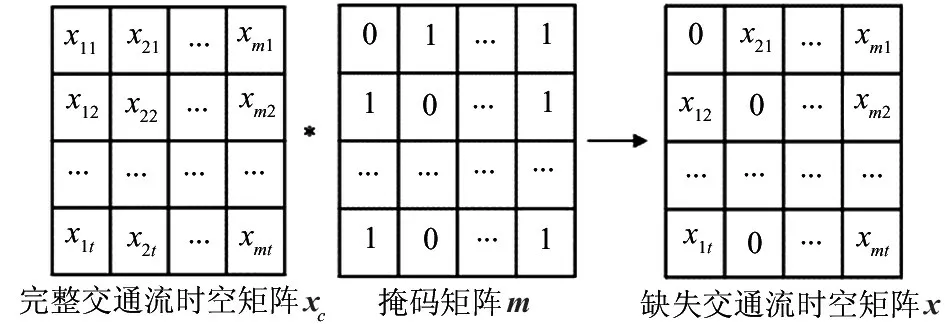
圖5 數(shù)據(jù)缺失處理示意圖
首先根據(jù)各檢測(cè)器歷史交通流數(shù)據(jù)構(gòu)建完整時(shí)空矩陣xC,然后構(gòu)建與交通流時(shí)空矩陣大小相同的掩碼矩陣m,最后將xC與m進(jìn)行點(diǎn)乘運(yùn)算,從而生成數(shù)據(jù)缺失下的交通流時(shí)空矩陣x。其中,掩碼矩陣m中的0 表示數(shù)據(jù)缺失,1 表示數(shù)據(jù)完整,0 與1的分布比例由實(shí)際的數(shù)據(jù)缺失率決定。為保證更好地模擬數(shù)據(jù)缺失過(guò)程,數(shù)據(jù)缺失處理過(guò)程中的數(shù)據(jù)損失率集合設(shè)定為{0.2,0.4,0.6,0.8},且構(gòu)建的m均為隨機(jī)生成。
3.3 模型參數(shù)
本文涉及的模型參數(shù)主要分為生成網(wǎng)絡(luò)、判別網(wǎng)絡(luò)、模型訓(xùn)練這3 部分。在生成網(wǎng)絡(luò)部分,全連接層1、GRU 層、全連接層2 的神經(jīng)元個(gè)數(shù)分別設(shè)置為64、32、4。在判別網(wǎng)絡(luò)部分,采用4 層全連接層,其每層神經(jīng)元個(gè)數(shù)分別設(shè)置為32、16、8、1。在模型訓(xùn)練部分,生成網(wǎng)絡(luò)與判別網(wǎng)絡(luò)均采用RMSProp 優(yōu)化器進(jìn)行訓(xùn)練,學(xué)習(xí)率設(shè)置為0.00001,批次大小為128,單次迭代下判別網(wǎng)絡(luò)訓(xùn)練次數(shù)設(shè)置為5,判別網(wǎng)絡(luò)的權(quán)重裁剪范圍設(shè)置為[-0.01,0.01]。此外,本文的交通流歷史數(shù)據(jù)窗口大小t設(shè)置為12,交通流預(yù)測(cè)窗口大小p即預(yù)測(cè)步長(zhǎng)設(shè)置為1。
3.4 性能評(píng)價(jià)指標(biāo)
為了更為有效地評(píng)估預(yù)測(cè)結(jié)果,本文選取了均方根誤差(RMSE)、絕對(duì)平均誤差(MAE)和平均絕對(duì)百分比誤差(MAPE)這3 個(gè)性能指標(biāo)來(lái)衡量模型的預(yù)測(cè)表現(xiàn)。其計(jì)算方式分別如下:

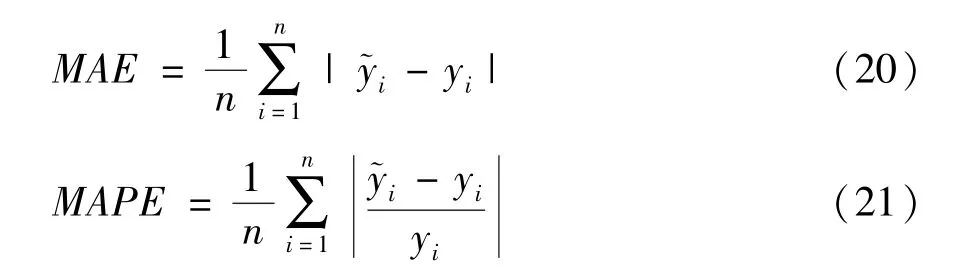
其中,yi表示交通流量的真實(shí)值,表示交通流量數(shù)據(jù)的預(yù)測(cè)值。
3.5 實(shí)驗(yàn)結(jié)果與分析
為有效了解和分析所提模型的交通流預(yù)測(cè)表現(xiàn),本文首先對(duì)數(shù)據(jù)缺失率為0.2 情況下的模型預(yù)測(cè)結(jié)果進(jìn)行分析。
以4 月27 日為例,提出模型的各路段預(yù)測(cè)結(jié)果如圖6 所示。從預(yù)測(cè)整體結(jié)果來(lái)看,所提模型具有較好的預(yù)測(cè)性能,其不僅可以有效捕捉交通流的變化趨勢(shì),還能夠較好地貼合交通流數(shù)據(jù)的真實(shí)值。此外,相比于高峰期的交通流預(yù)測(cè)而言,該模型在非高峰期的交通流預(yù)測(cè)有著更大的優(yōu)勢(shì)和精準(zhǔn)度。

圖6 提出模型的各路段預(yù)測(cè)結(jié)果
為了進(jìn)一步驗(yàn)證提出模型的預(yù)測(cè)性能,本文還對(duì)模型在其余數(shù)據(jù)缺失率情況下的交通流預(yù)測(cè)進(jìn)行了實(shí)驗(yàn),并將提出模型的預(yù)測(cè)表現(xiàn)與KNN、SVR、反向傳播神經(jīng)網(wǎng)絡(luò)(back propagation,BP)、LSTM、GRU、SAE、Conv-LSTM 進(jìn)行了對(duì)比。各模型在不同數(shù)據(jù)缺失情況下的預(yù)測(cè)結(jié)果性能指標(biāo)分析如表1~表3 所示。
從表1~表3 中可知,在不同程度的數(shù)據(jù)缺失下,本文提出的模型預(yù)測(cè)性能均高于其他對(duì)比模型。在數(shù)據(jù)缺失率為0.2 時(shí),本文模型在RMSE、MAE、MAPE 上分別改善了11.95%~40.08%、12.07%~43.55%和13.53%~39.26%;在數(shù)據(jù)缺失率為0.4時(shí),本文模型在RMSE、MAE、MAPE 上分別改善了9.28%~52.85%、9.87%~58.31%和10.60%~48.12%;在數(shù)據(jù)缺失率為0.6 時(shí),本文模型在RMSE、MAE、MAPE 上 分 別 改 善 了11.12%~63.31%、11.93%~68.20%和11.01%~56.75%;在數(shù)據(jù)缺失率為0.8 時(shí),本文模型在RMSE、MAE、MAPE 上分別改善了4.74%~64.35%、5.67%~69.18%和7.80%~54.19%。在對(duì)比模型中,KNN 預(yù)測(cè)表現(xiàn)最差,SVR 的非線性空間映射使其預(yù)測(cè)表現(xiàn)要優(yōu)于BP 和SAE,LSTM 和GRU 因其優(yōu)秀的時(shí)間特征處理能力而有著較好的預(yù)測(cè)表現(xiàn),而Conv-LSTM 對(duì)交通數(shù)據(jù)時(shí)空特征的有效處理使其預(yù)測(cè)表現(xiàn)要遠(yuǎn)優(yōu)于其他對(duì)比模型。
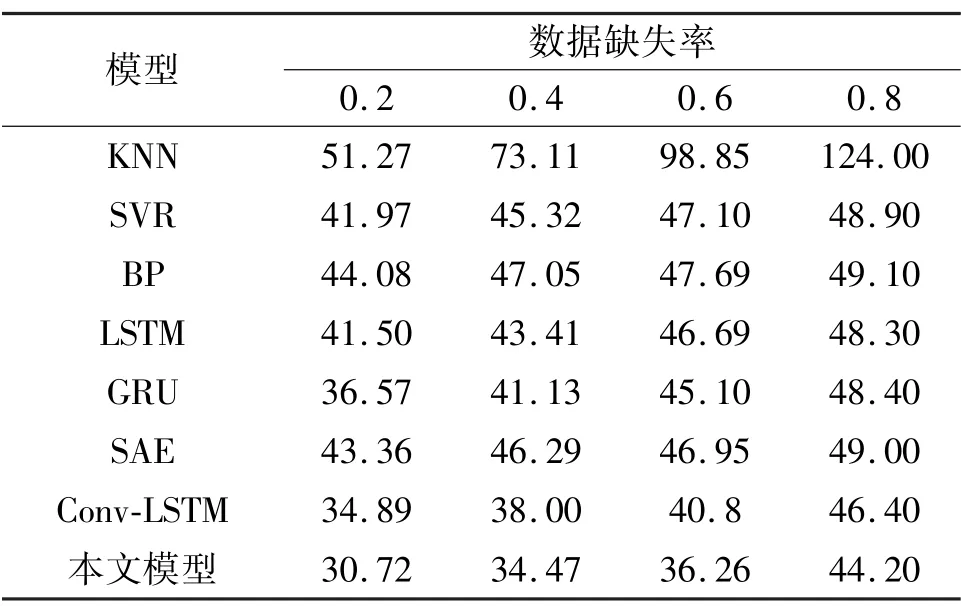
表1 各模型RMSE 性能指標(biāo)分析
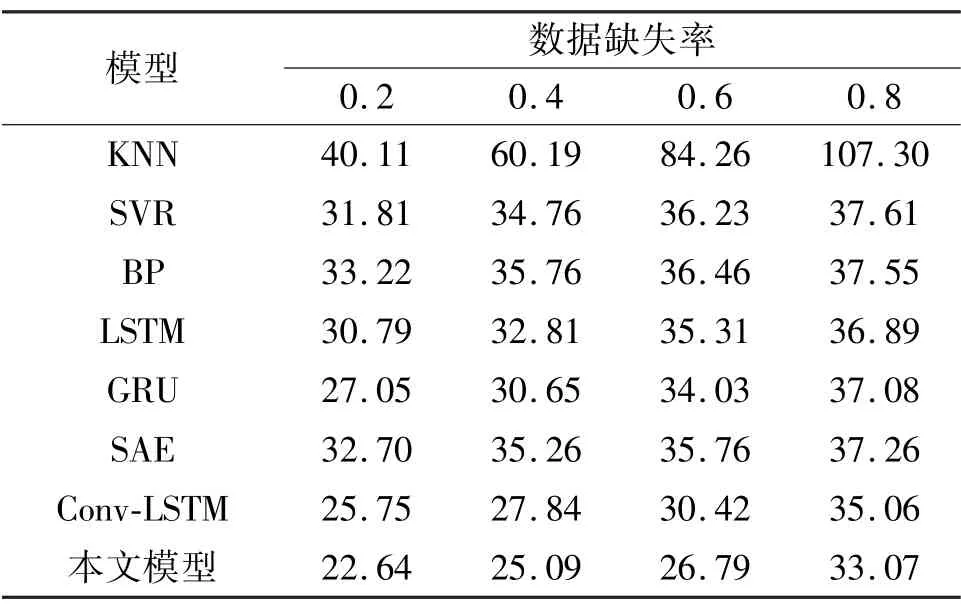
表2 各模型MAE 性能指標(biāo)分析
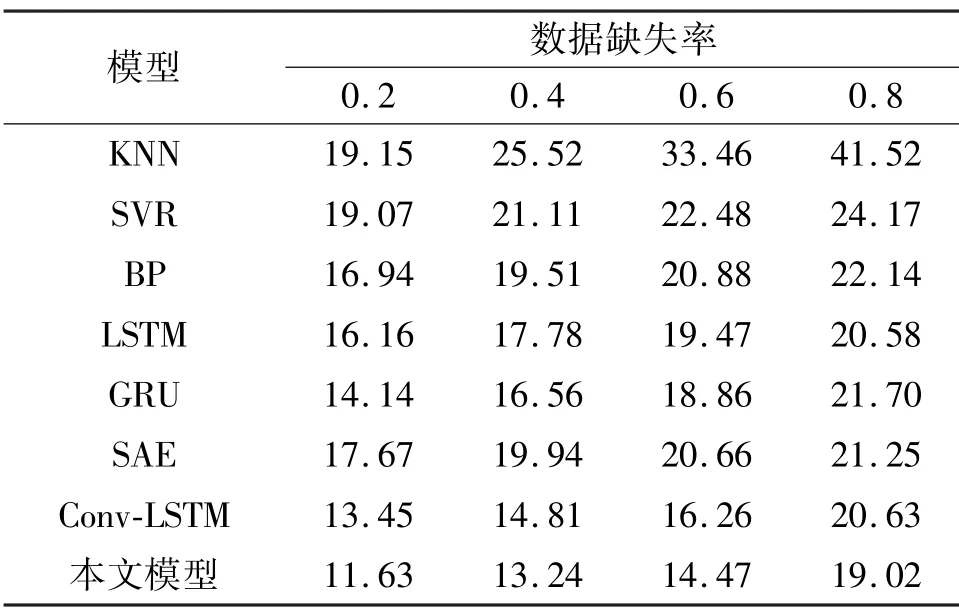
表3 各模型MAPE(%)性能指標(biāo)分析
此外,為探究數(shù)據(jù)修復(fù)函數(shù)對(duì)于本文模型的預(yù)測(cè)表現(xiàn)影響,本文對(duì)不含數(shù)據(jù)修復(fù)損失函數(shù)的預(yù)測(cè)模型進(jìn)行了實(shí)驗(yàn)分析,其分析結(jié)果如表4 所示。
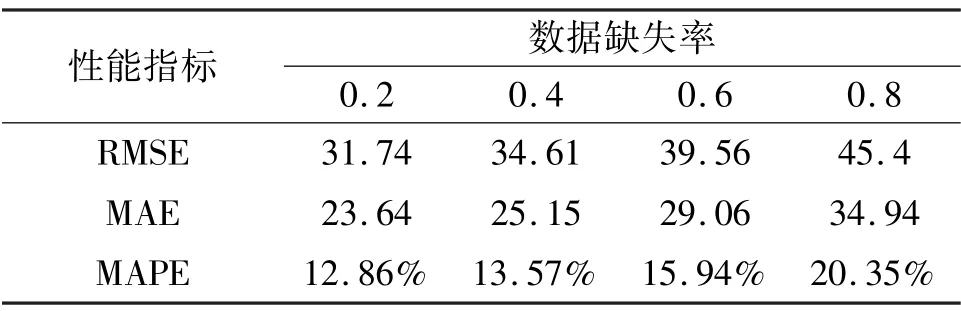
表4 無(wú)數(shù)據(jù)修復(fù)損失函數(shù)下的模型預(yù)測(cè)結(jié)果分析
將有無(wú)數(shù)據(jù)修復(fù)損失函數(shù)的模型預(yù)測(cè)性能進(jìn)行對(duì)比,可以發(fā)現(xiàn)本文模型在缺乏對(duì)數(shù)據(jù)修復(fù)損失函數(shù)考慮后,其預(yù)測(cè)性能出現(xiàn)了一定的下降。因此,在本文模型損失函數(shù)設(shè)計(jì)過(guò)程中對(duì)數(shù)據(jù)修復(fù)損失函數(shù)進(jìn)行考慮并使用具有一定的合理性。雖然本文模型的預(yù)測(cè)性能在不考慮數(shù)據(jù)修復(fù)損失函數(shù)時(shí)會(huì)出現(xiàn)一定的下降,但是依舊要優(yōu)于其他對(duì)比預(yù)測(cè)模型。
4 結(jié)論
本文旨在解決數(shù)據(jù)缺失下的短時(shí)交通預(yù)測(cè)問(wèn)題,以實(shí)現(xiàn)交通數(shù)據(jù)缺失下更直接、更精準(zhǔn)的短時(shí)交通流預(yù)測(cè)。為實(shí)現(xiàn)這一目標(biāo),本文基于生成式對(duì)抗網(wǎng)絡(luò)提出了一種以缺失數(shù)據(jù)為輸入、未來(lái)交通流狀態(tài)為輸出的端到端的預(yù)測(cè)模型。在模型生成網(wǎng)絡(luò)部分,本文利用全連接層和GRU 層實(shí)現(xiàn)缺失數(shù)據(jù)中重要特征的提取和預(yù)測(cè)結(jié)果的輸出;在模型判別網(wǎng)絡(luò)部分,本文采用多層全連接層完成對(duì)生成數(shù)據(jù)與真實(shí)數(shù)據(jù)的區(qū)分。在模型損失函數(shù)設(shè)計(jì)上,本文對(duì)WGAN 損失函數(shù)進(jìn)行了改進(jìn),在其基礎(chǔ)上添加了數(shù)據(jù)修復(fù)損失函數(shù)。實(shí)驗(yàn)結(jié)果表明,本文提出的模型在不同的數(shù)據(jù)缺失下均有著較好的預(yù)測(cè)表現(xiàn)且預(yù)測(cè)性能也均優(yōu)于其他對(duì)比模型。此外,本文通過(guò)有無(wú)數(shù)據(jù)修復(fù)損失函數(shù)下的模型預(yù)測(cè)表現(xiàn)對(duì)比,驗(yàn)證了模型損失函數(shù)改進(jìn)的可行性和有效性。本文以高速路為實(shí)驗(yàn)對(duì)象,其網(wǎng)絡(luò)結(jié)構(gòu)復(fù)雜度相對(duì)較低,在未來(lái)的研究中可以對(duì)更為復(fù)雜的城市道路的短時(shí)交通流預(yù)測(cè)進(jìn)行研究。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19

- 高技術(shù)通訊的其它文章
- 基于專利和論文分析的我國(guó)納米技術(shù)研究進(jìn)展①
- 履帶車輛變速箱振動(dòng)特性分析及實(shí)驗(yàn)研究①
- 基于改進(jìn)Deeplabv3 +網(wǎng)絡(luò)的線纜表面缺陷檢測(cè)研究①
- 基于多核學(xué)習(xí)極限學(xué)習(xí)機(jī)的助行機(jī)器人運(yùn)動(dòng)相容性識(shí)別①
- 基于變速趨近律全階滑模觀測(cè)器的異步電機(jī)無(wú)速度傳感器控制①
- 基于OPC UA 協(xié)議的工業(yè)網(wǎng)關(guān)系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)①