基于位置觀測量的光纖陀螺慣導系泊條件自標定方法
2021-11-05 02:53:12饒國像楊曉鶯
導航與控制 2021年4期
饒國像, 周 元, 楊曉鶯
(1.超精密航天控制儀器技術實驗室,北京100039;2.北京航天控制儀器研究所,北京100039)
0 引言
光纖陀螺慣導系統通過安裝在臺體上的陀螺敏感外界角運動,控制臺體處于空間穩定狀態,是一種全天候、抗干擾、完全自主性的高精度導航系統。光纖陀螺(Fiber Optic Gyroscope,FOG)具有結構簡單、動態范圍寬、瞬時響應靈敏、可承受較大過載、壽命長等優點,正逐漸發展為高精度導航領域主要的慣性器件之一[1-2]。光纖陀螺慣導系統在導航過程中能夠隔離外界角運動,相對慣性空間保持穩定,為慣性器件提供了一個良好的工作環境。慣導系統的導航精度主要取決于慣性測量單元(Inertial Measure Unit,IMU),由于慣性器件的誤差會隨時間發生變化,因此需定期對相關誤差參數重新標定。對IMU的標定是慣導系統的一項關鍵技術。
慣導系統的傳統標定方法是將其拆卸下來,利用高精度轉臺,通過不同的位置編排對慣性器件相關誤差參數進行標定[3]。為解決分立式標定對硬件設備要求高、操作過程繁瑣的問題,出現了系統級在線自標定方法,避免了拆裝的復雜性,并維持了長期的使用精度。此方法將IMU進行多位置自主轉位,利用IMU敏感重力加速度和地球自轉角速度,通過解析法可估計慣性器件的誤差系數。如楊立溪[4]設計了一種十六位置的誤差標定及自主對準的一體化方案,能夠分離出包括方位角在內的42項誤差。包為民等[5]從慣導系統誤差模型入手,分析了不同位置對估計結果的影響,設計了一種十六位置的最優多位置標定方案。另一種方法是基于導航方式的自標定,在每個位置進行導航解算,導航結果中包含有IMU的誤差信息,以導航結果為觀測量可分離出誤差系數。如翁海娜等[6]針對混合式光纖陀螺慣導系統設計了一種 “速度+位置”匹配的自標定方法,能在線標定30項誤差系數。為進一步提高標定精度與速度,出現了慣導系統連續旋轉自標定的方法[7]。李魁等[8]針對混合式慣導系統的結構特點和旋轉方式進行誤差分析,給出了轉位路徑的設計原則和可觀測性分析方法。上述方案均要求在靜基座條件下進行,無法適用于系泊環境條件。楊玉孔等[9]提出了一種針對艦船在錨泊條件下激光陀螺捷聯慣導全參數的標定方法,需用外部提供的高精度經緯度作為觀測量。Jorgensen等[10]提出了針對捷聯慣導在三種環境下的基于Kalman濾波的標定方法,需采用GPS提供精確的位置信息作為觀測量。袁鵬等[11]提出了一種針對艦載激光陀螺慣導系統系泊狀態的基于 “速度+位置”匹配的自標定方法,該方法對速度誤差進行濾波,會產生相位延遲,無法滿足精度要求。以上幾種適用于動基座條件的標定方法都需要引入外界參考信息。
在此基礎上,本文針對艦船在系泊環境下受到海浪等因素干擾,研究了一種基于位置觀測量的高精度慣導系統動基座自標定方法,能夠在45min內準確估計出光纖陀螺慣導系統的18項誤差系數,并針對不同的系泊環境運動學條件分析其對自標定結果精度的影響,得出了此標定方法的動基座適用條件。
1 慣導系統誤差分析
1.1 慣性器件誤差模型
以石英加速度計輸入軸坐標系為參考基準建立臺體坐標系p系(OXpYpZp),如圖1所示。OXp軸與X加速度計的敏感軸重合,OZp軸位于OXp軸與Z加速度計的敏感軸構成的平面內,并與OXp軸垂直,OYp軸由右手定則確定。
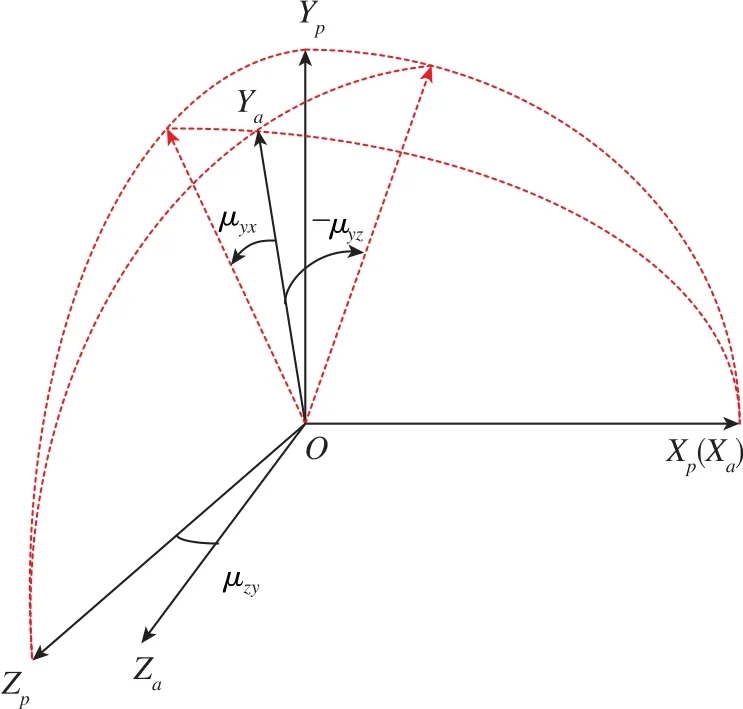
圖1 臺體坐標系示意圖Fig.1 Schematic diagram of platform coordinate system
加速度計的誤差模型為
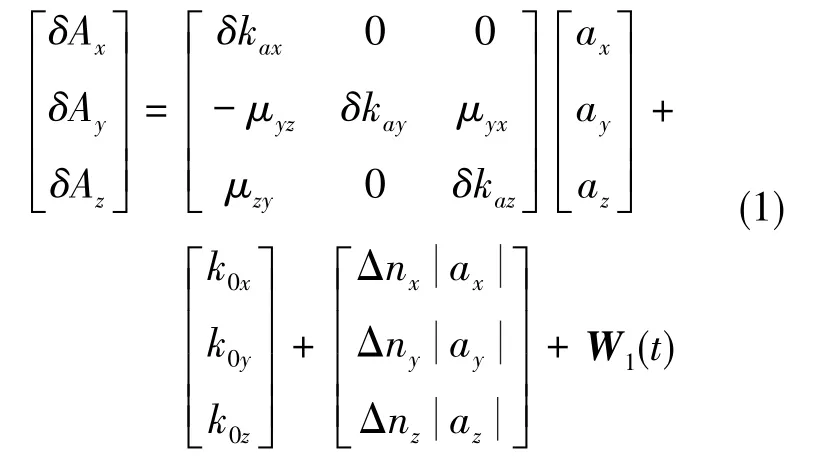
式(1)中,δAx、δAy、δAz分別為x軸、y軸、z軸加速度計的輸出誤差,k0x、k0y、k0z分別為3個加速度計的零偏,δkax、δkay、δkaz分別為3個加速度計的標度因數誤差,μyz、μyx、μzy為加速度計的安裝誤差,Δnx、Δny、Δnz為加速度計的標度不對稱誤差,ax、ay、az為臺體坐標系下的比力輸入,W1(t)為加速度計的隨機噪聲。
光纖陀螺的誤差模型為
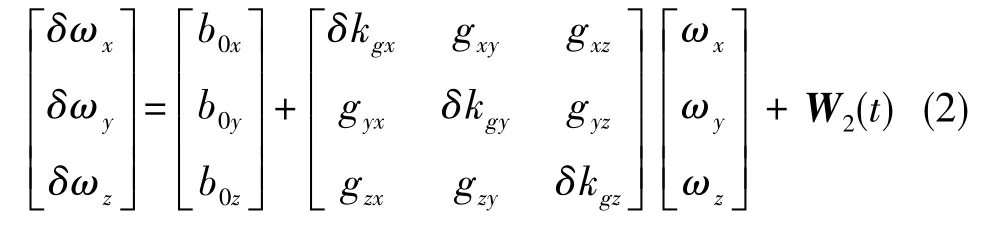
式(2)中,δωx、δωy、δωz分別為x軸、y軸、z軸陀螺的輸出誤差,b0x、b0y、b0z分別為3個陀螺的零次項,δkgx、δkgy、δkgz分別為3個陀螺的標度因數誤差,ωx、ωy、ωz為臺體坐標系下的角速度輸入,gxy、gxz、gyx、gyz、gzx、gzy為陀螺的安裝誤差,W2(t)為陀螺的隨機噪聲。
1.2 系統誤差方程
選取東天南坐標系為導航坐標系(g系),設加速度計的輸出值為對應臺體坐標系下加速度輸出為

對應在導航坐標系下的加速度輸出為

設Xe為包含基座初始對準誤差角?x、?y、?z和所有加速度計誤差在內的狀態向量,有

將式(4)在每個角位置對誤差項Xe進行一階Taylor展開,有

式(7)左邊為理想情況下的加速度在導航坐標系下的投影,右邊為根據預設的Xe值計算得到的加速度計輸出在導航坐標系下的投影。在第一次導航解算過程中,由于對慣導系統各誤差系數的預設值不準確,故加速度計算誤差在導航系的投影為

由于光纖陀螺慣導的臺體能夠隔離外界角運動,在導航過程中臺體處于空間穩定狀態,此時臺體相對慣性空間沒有角速度輸入,陀螺的標度因數誤差和安裝誤差對導航誤差影響不顯著,故不需要標定,只需考慮光纖陀螺的零偏。導航坐標系下,導航解算的漂移角速度誤差主要是由于陀螺漂移和初始方位角不準確引起的地球自轉角速度分量誤差造成的,則在每個位置上的角速度綜合誤差為

式(9)中,由方位角誤差產生的地球自轉角速度在導航坐標系下的投影L為當地緯度。
2 標定方案設計
合理的轉位路徑可充分激勵各項誤差系數,利用慣導系統處于導航標定狀態時導航解算的位置誤差中包含有慣導系統的誤差信息,分離出加速度綜合誤差和角速度綜合誤差在導航坐標系下的投影,然后根據系統誤差方程辨識各誤差系數。
在標定加速度計和陀螺誤差系數的過程中,采用迭代最小二乘的方法,第一次迭代時默認各誤差系數的預設值為零,以后每次迭代結束后,將得到的估計結果對誤差系數的預設值修正代入下一次迭代計算中,直至本次迭代結果與上一次迭代結果誤差達到預設范圍內時迭代結束。
2.1 綜合誤差辨識
艦載慣導系統處于碼頭系泊狀態時,慣導系統相對地理系的位置變化很小,在標定過程中可認為位置變化近似為零。水平方向上導航解算的位置誤差由位置誤差初值r0xg和r0zg、速度誤差Vxg和Vzg、加速度綜合誤差Δxg和Δzg、角速度誤差ωxg和ωzg引起,用多項式擬合位置誤差可表示為
豎直方向的位置誤差可表示為

在某一個位置時,第i個采樣時刻能得到一個位置觀測值rix、riz、riy,有
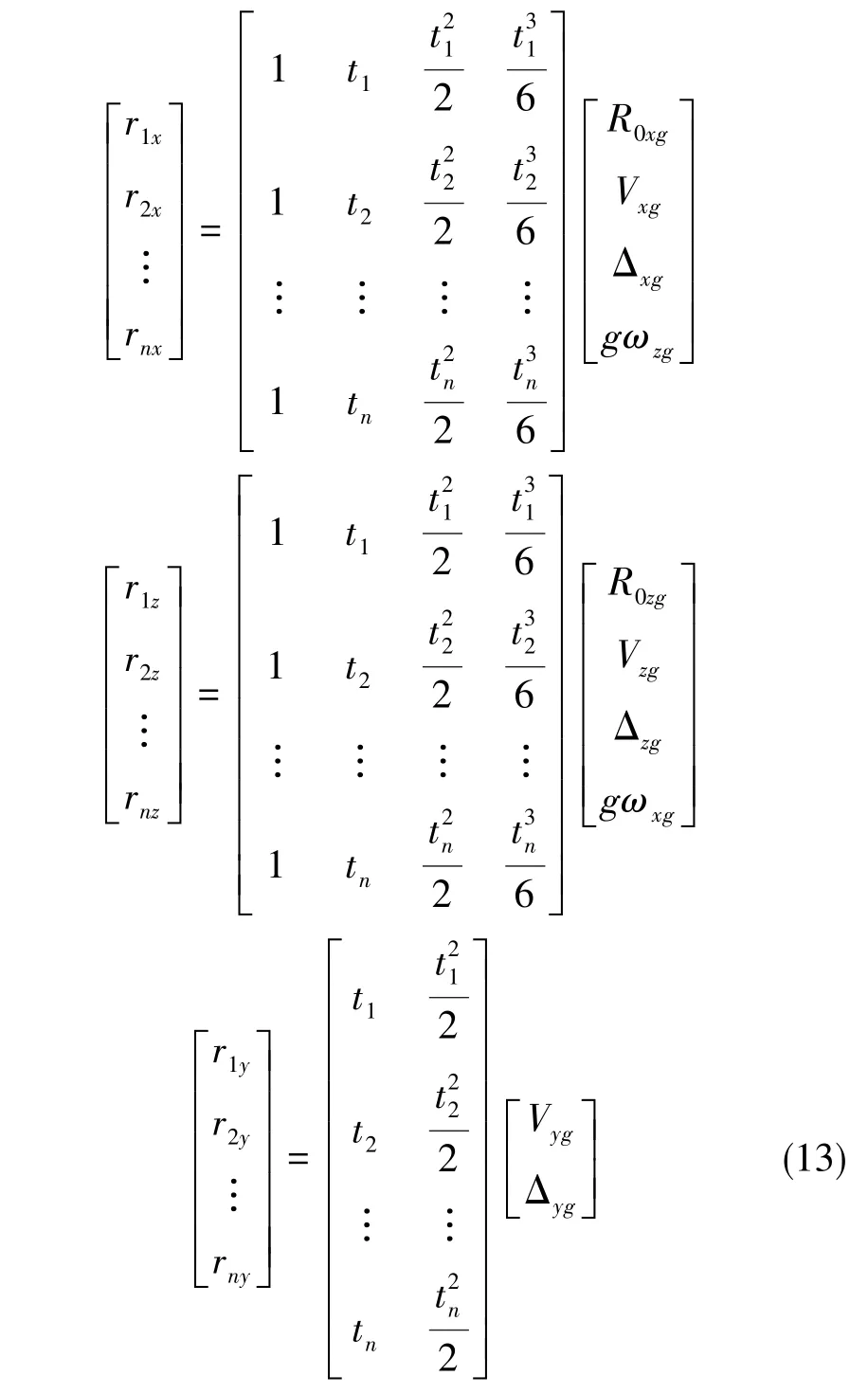
使用最小二乘的方法可以計算出Δxg、Δyg、Δzg。
當考慮陀螺漂移誤差時,水平方向上導航解算的位置誤差由位置誤差初值、速度誤差、水平偏角誤差αxg和αzg以及角速度綜合誤差引起,有
同理,用最小二乘的方法可以計算出ωxg、ωzg。
2.2 基于可觀測性分析的轉位路徑設計
為使光纖陀螺慣導系統各誤差系數充分體現在觀測量中,需通過不同位置的指向有效激勵所有誤差源,以提高濾波收斂效果。根據標定要求設計了8位置的轉位方案,如表1所示。
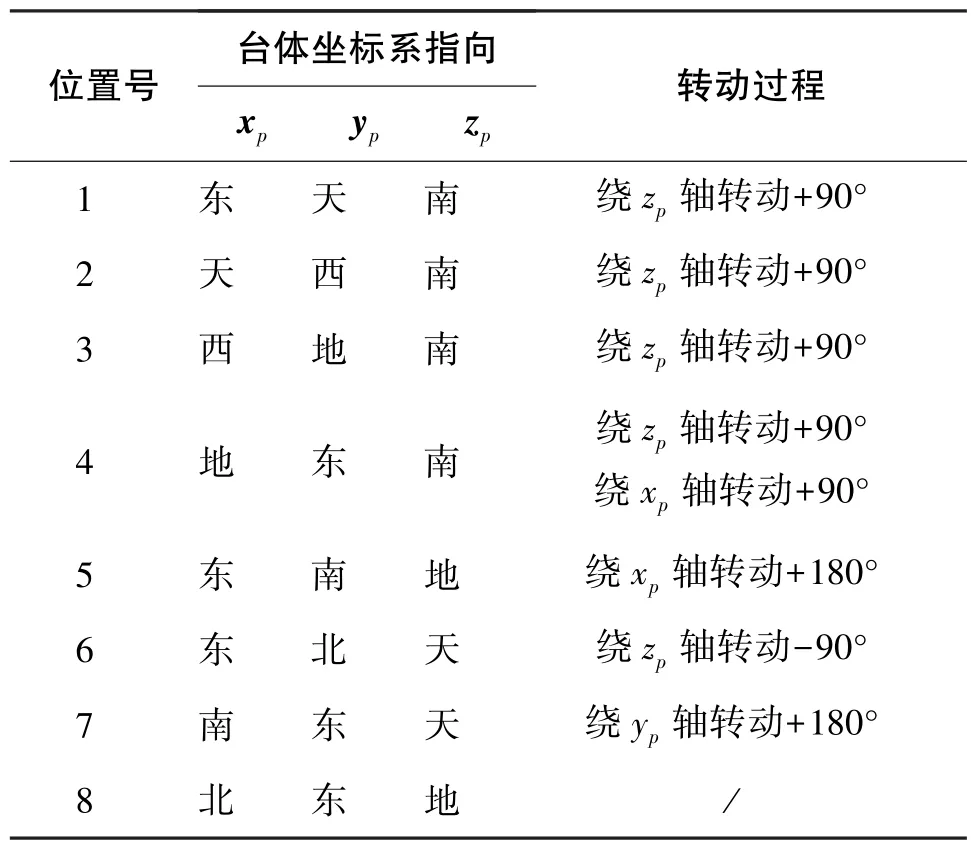
表1 自標定轉位位置方案Table 1 Rotation position scheme of self-calibration
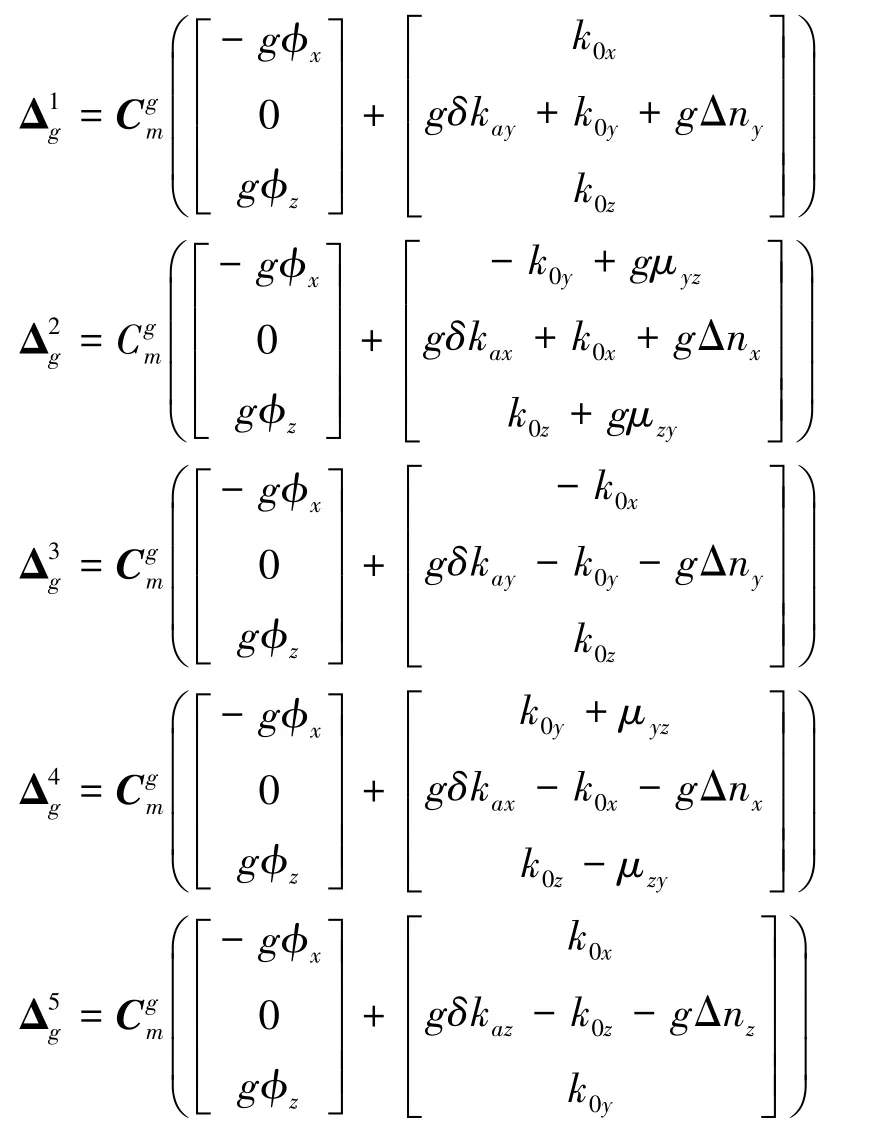
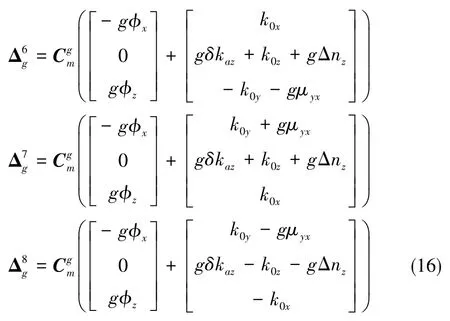
根據所設計的位置,可以推導出每個位置下的系統誤差方程,由式(8)可得在每個位置的加速度綜合誤差
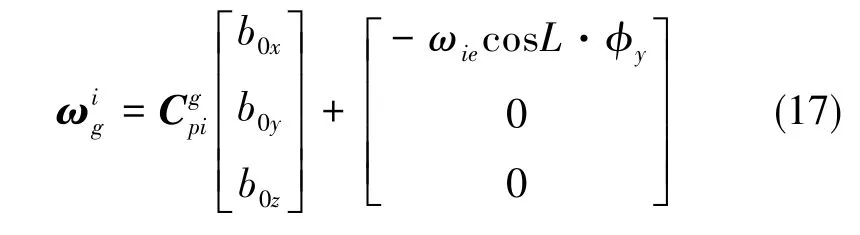
由式(9)可得在每個位置的角速度綜合誤差
取水平失準角和加速度計誤差系數為狀態向量Xe1,光纖陀螺的零偏和方位失準角為狀態向量Xe2=[b0xb0yb0z?y]T,以八個位置加速度綜合誤差和水平方向角速度綜合誤差為觀測量可得標定過程的觀測方程
將觀測矩陣Hg1、Hg2按位置寫成分塊形式,具體如下
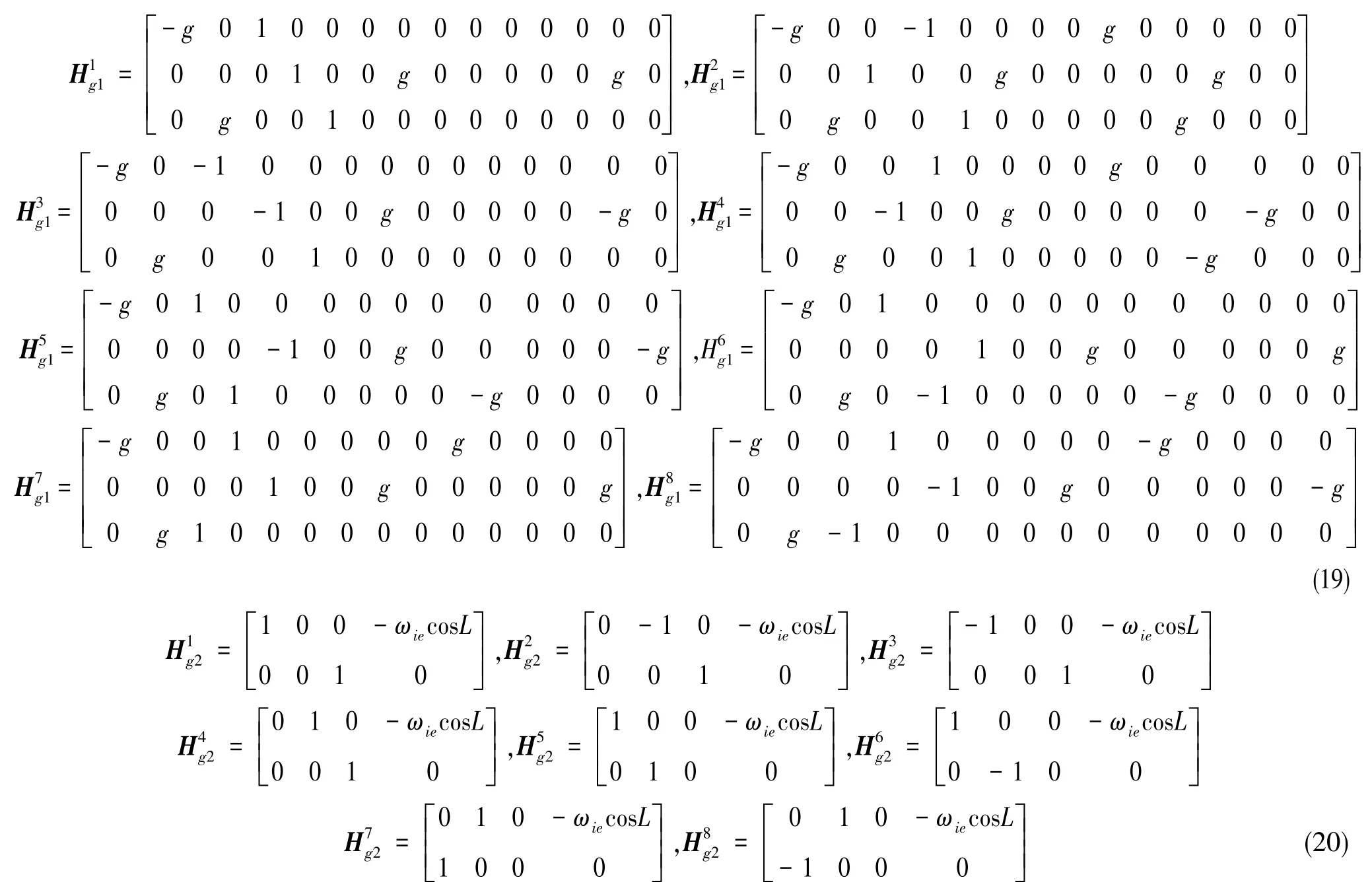
通過計算可得:rank(Hg1)=14、rank(Hg2)=4,觀測矩陣都是列滿秩,說明系統是完全可觀測的,可以估計出所有誤差系數。
3 系泊環境運動學模型
通過對艦船在碼頭系泊環境下采集的運動數據進行分析,可知系泊環境包含縱搖、橫搖、偏航3個方向的角運動和3個方向的線運動共6個自由度的運動學模型[12],其角運動由多個不同幅值和頻率的正弦信號疊加而成,在不同海況條件下,其幅值和頻率構成有所不同。若通過晃動運動來模擬海浪運動,選取的典型海態環境的運動參數滿足:規律性搖擺角運動和線運動的周期為6s~20s,繞方位軸的幅值不超過0.6°,繞水平軸的幅值不超過3.5°,線運動的最大幅值為0.5m。
模擬某典型海態環境的角運動模型
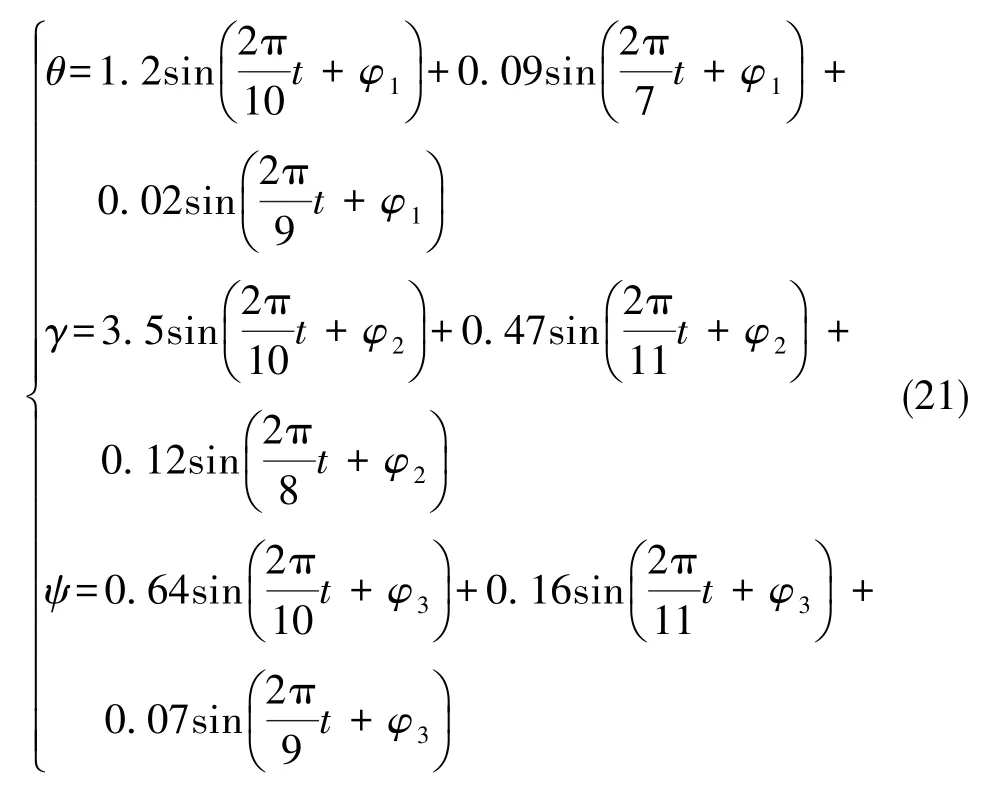
式(21)中,θ、γ、ψ、φ分別為縱搖角、橫搖角、偏航角、相位角。角運動的變化曲線如圖2~圖4所示。
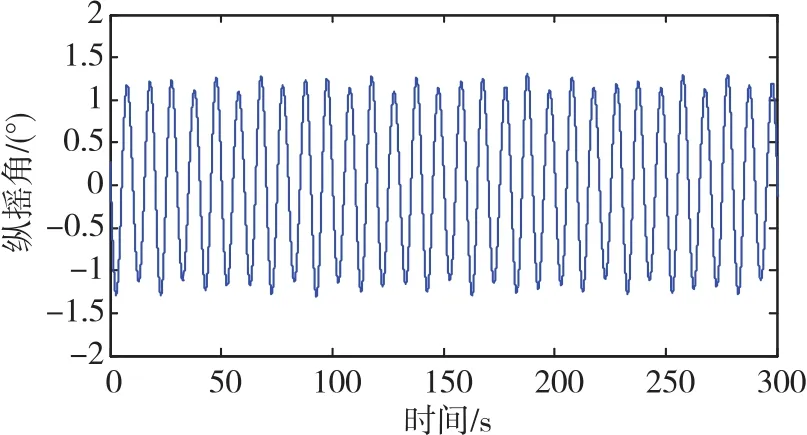
圖2 縱搖角變化曲線Fig.2 Curve of pitch angle
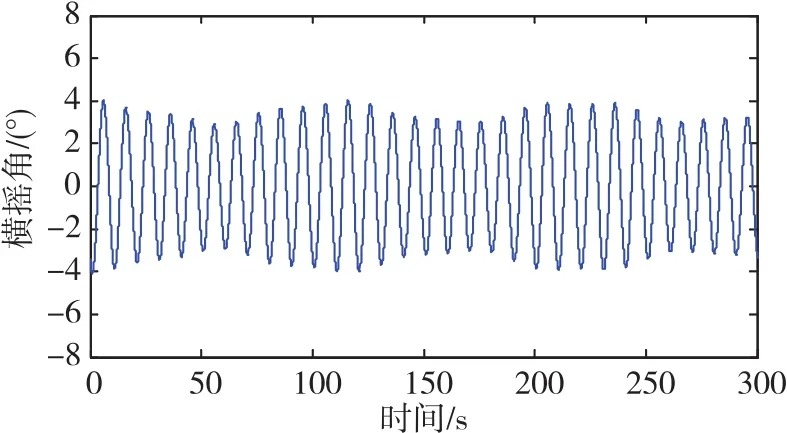
圖3 橫搖角變化曲線Fig.3 Curve of roll angle
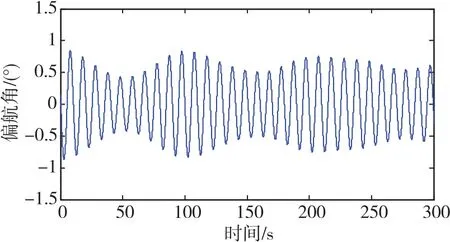
圖4 偏航角變化曲線Fig.4 Curve of heading angle
典型的線運動模型如下
線運動的變化曲線如圖5所示。
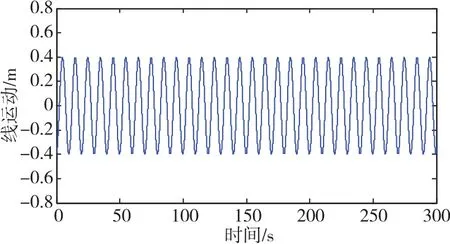
圖5 線運動變化曲線Fig.5 Curve of linear motion
4 仿真結果分析
4.1 典型工況下的標定仿真結果
為了驗證此方法在典型工況晃動條件下的標定效果,分別進行了靜基座和動基座的仿真實驗。利用Monte Carlo仿真方法,在靜基座和典型工況晃動條件下根據慣性儀表的統計特性仿真100組數據,假設慣性儀表統計特性滿足如下條件:加速度計零偏滿足均值≤100μg、標準差為5μg的正態分布,加速度計標度不對稱誤差滿足均值≤1×10-4、標準差為 5×10-6的正態分布, 陀螺零次項滿足均值≤0.3(°)/h、標準差為 0.005(°)/h 的正態分布,加速度計和陀螺的標度因數誤差滿足均值≤5×10-4、標準差為 1×10-5的正態分布, 加速度計和陀螺的安裝誤差滿足均值≤5′、標準差為5″的正態分布。根據3σ原則,可認為慣性儀表的均值統計特性滿足以0為均值、最大值的1/3為標準差的正態分布。每個位置的導航標定時間為300s。
按照式(21)、式(22)的系泊環境運動學模型對角運動和線運動求導,可得到系泊環境對慣導基座作用產生的角速度和線加速度,利用Matlab仿真模擬不同環境下慣導系統在標定過程中的輸出數據。
采用八位置自標定方法對輸出數據進行處理,得到靜基座和典型工況下的標定結果誤差,如表2所示。表2中,取100次仿真結果中誤差系數估計誤差的最大值來評估參數標定的精度。由于篇幅有限,給出的典型工況條件下某次標定結果誤差變化收斂趨勢如圖6、圖7所示。
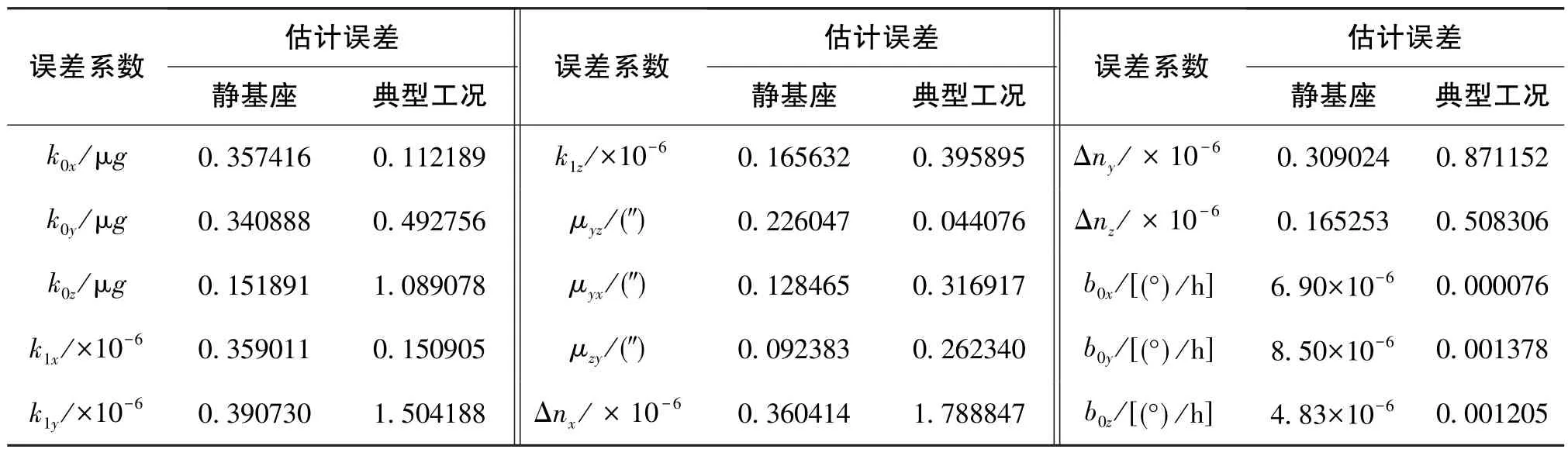
表2 標定誤差仿真結果Table 2 Simulation results of calibration errors
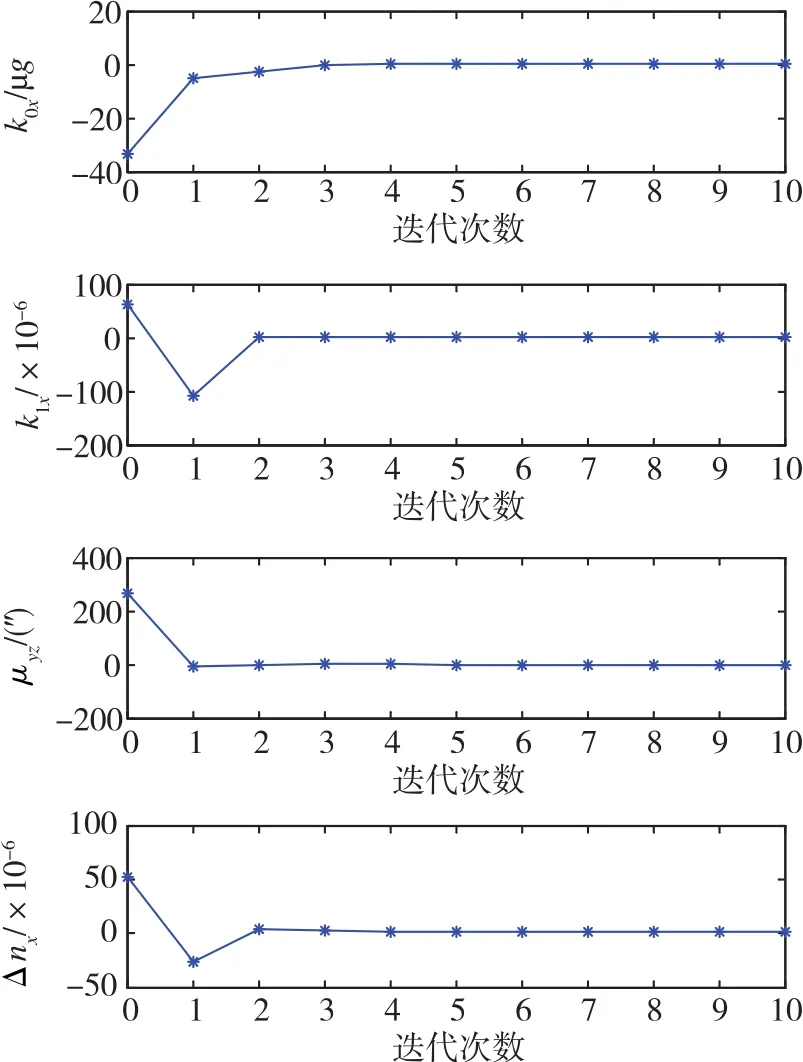
圖6 加速度計誤差估計結果Fig.6 Estimation results of accelerometer errors
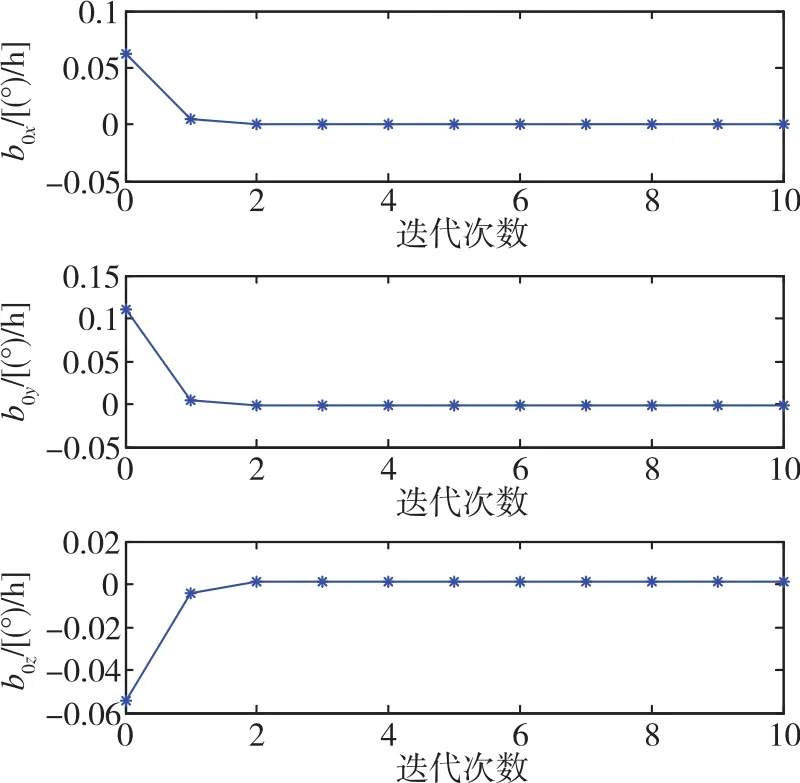
圖7 陀螺漂移誤差估計結果Fig.7 Estimation results of gyroscope bias errors
由表2可知,典型工況環境下,加速度計零偏估計精度優于1.1μg,加速度計標度因數誤差估計精度優于1.5×10-6,加速度計標度不對稱誤差估計精度優于1.8×10-6,陀螺零次項估計精度優于0.0014(°)/h,加速度計和陀螺安裝誤差估計精度優于 0.4″。
圖6、圖7為迭代10次后估計誤差的變化過程,第10次迭代估計結果與第9次迭代估計結果之差滿足迭代收斂條件。由誤差系數估計結果變化趨勢可知,各項誤差系數估計誤差收斂于0附近。由多次仿真結果可知,一般迭代4次左右即可滿足條件。
4.2 不同晃動條件下的標定仿真結果分析
為分析不同海況條件下光纖陀螺慣導標定的適應能力,針對系泊環境的運動學模型,以典型工況的運動學條件為基準,仿真設置了相位隨機獲得、不同頻率和幅值的多種環境參數作用于慣導系統基座上,具體工況的運動學條件如表3所示。為了更直觀地對比估計效果,將不同海況條件下的100組估計誤差結果放在同一坐標系中,如圖8~圖11所示。由于篇幅有限,只給出加速度計零偏和標度因數、陀螺漂移的對比圖。每項誤差系數求100組估計誤差的最大值得到不同海況條件下的標定結果,如表4所示。
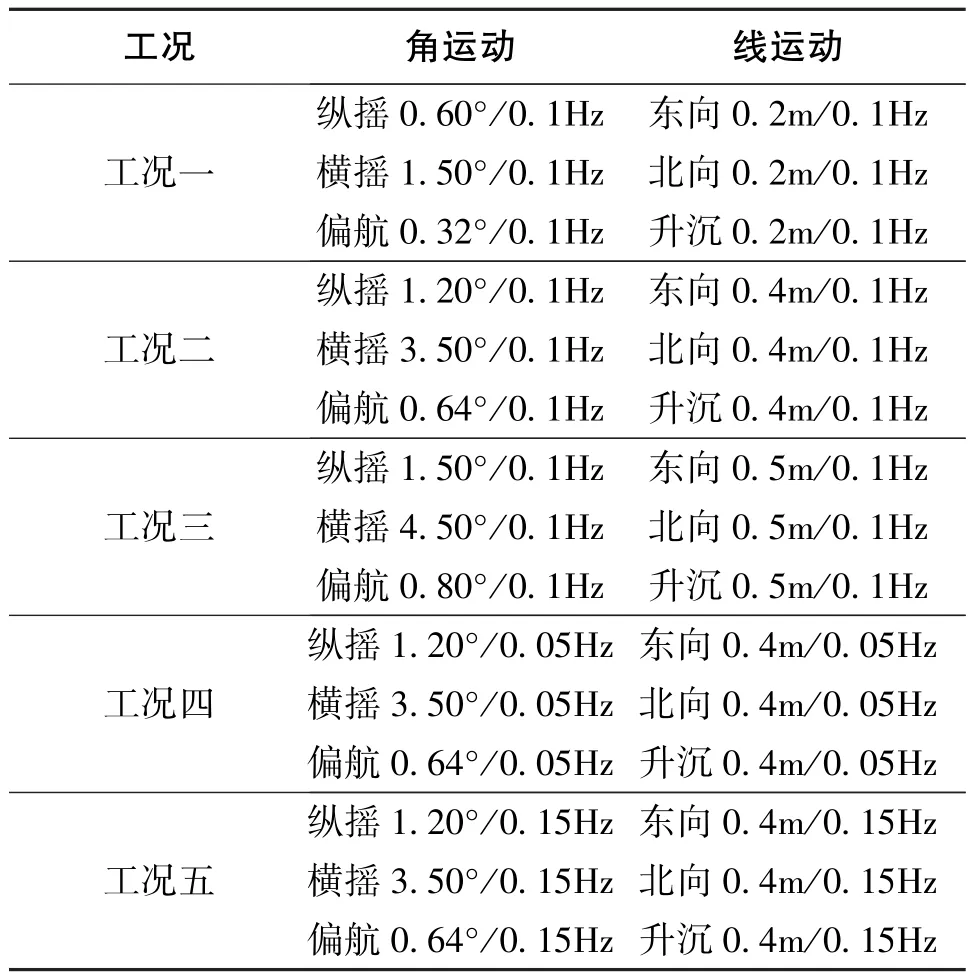
表3 不同海況條件的運動學參數Table 3 Kinematic parameters under different marine conditions
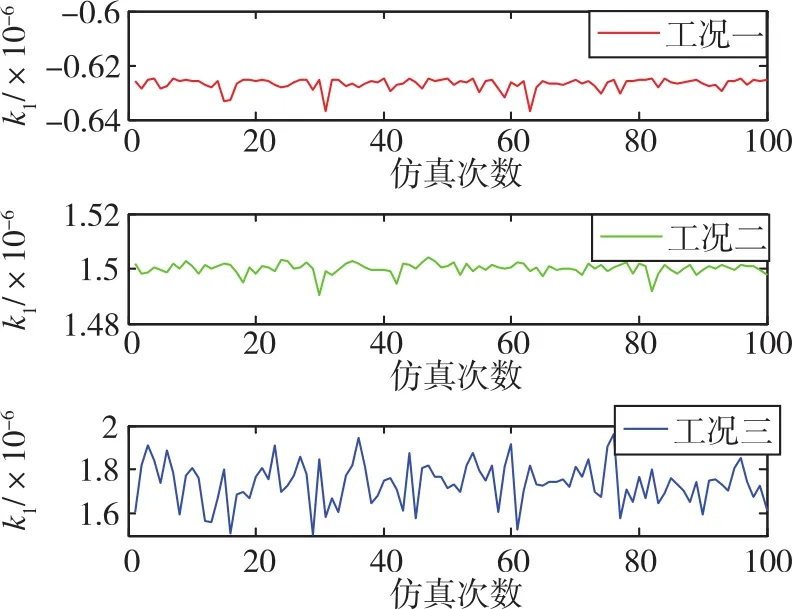
圖8 不同幅值條件下加速度計標度因數估計誤差對比Fig.8 Comparison of accelerometer scale factor estimation errors under different amplitude conditions
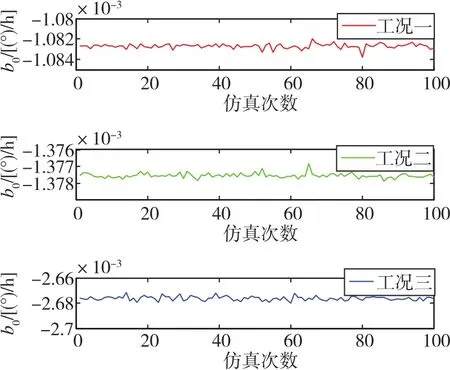
圖9 不同幅值條件下陀螺零次項估計誤差對比Fig.9 Comparison of gyroscope bias estimation errors under different amplitude conditions
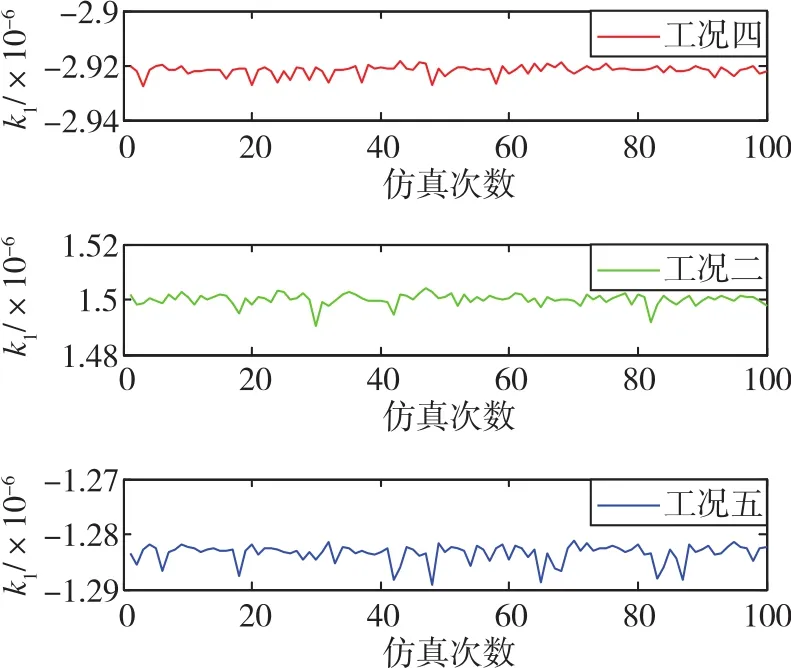
圖10 不同頻率條件下加速度計標度因數估計誤差對比Fig.10 Comparison of accelerometer scale factor estimation errors under different frequency conditions

圖11 不同頻率條件下陀螺零次項估計誤差對比Fig.11 Comparison of gyroscope bias estimation errors under different frequency conditions
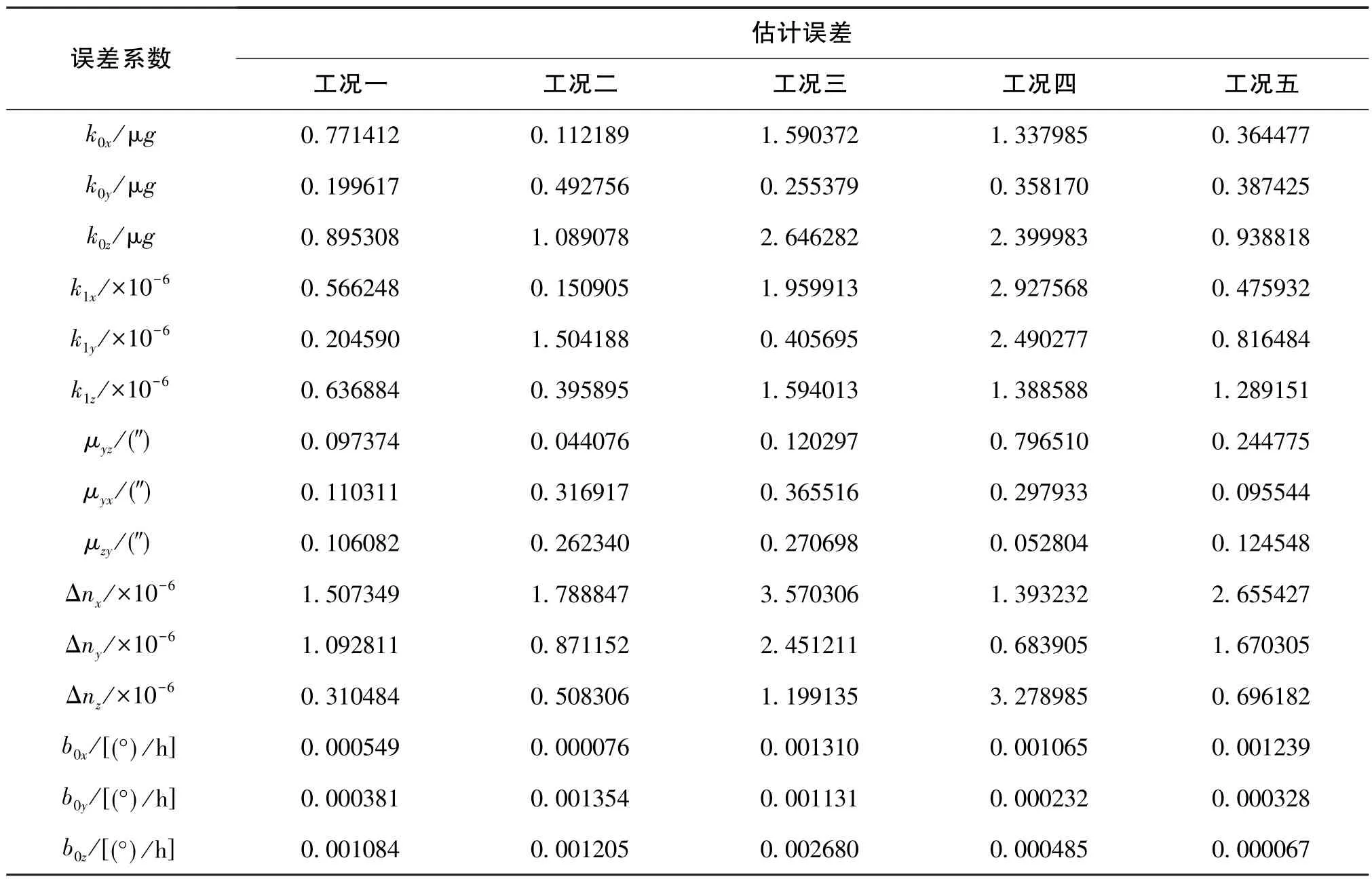
表4 不同系泊工況下的標定誤差對比Table 4 Comparison of calibration errors under different mooring conditions
根據表4的估計誤差結果,進行以下分析:
(1)海態干擾運動幅值對標定精度的影響
對比工況一、工況二和工況三條件下的估計結果可知,隨著干擾運動幅值逐漸增大,加速度計零偏、標度因數、安裝誤差和標度不對稱誤差估計誤差的最大值逐漸變大,表明加速度計的標定精度逐漸降低;由工況二到工況三的干擾運動幅值變化梯度比工況一到工況二的要小,但是加速度計誤差系數估計精度變化更顯著,說明在工況三系泊條件附近此標定方法對干擾運動幅值變化更為敏感。從陀螺零次項估計誤差結果也可以看出,估計精度隨干擾運動幅值變大而降低。
干擾運動的幅值直接影響標定結果的精度,同頻率下幅值越大,作用在慣導上的角速度和線加速度越大,對慣性儀表輸出的影響越大,導致導航標定過程中位置誤差變大,將直接影響標定方法誤差。
(2)干擾運動頻率對標定精度的影響
對比工況四、工況二和工況五條件下加速度計零偏、標度因數、安裝誤差和標度不對稱誤差的估計結果,可知在工況四條件頻率最低時(0.05Hz)估計精度最差。陀螺零次項估計誤差最大值隨著頻率的逐漸提高變化不顯著,表明在系泊環境頻率范圍內頻率對陀螺零次項估計精度的影響不顯著。
本文采用以位置誤差為觀測量的系統辨識方法估計誤差系數,在利用最小二乘估計某位置綜合誤差的過程中對慣性儀表輸出有一個平滑的過程,海態干擾環境的周期性正弦擾動作用會相互抵消一部分。在系泊環境頻率范圍內,頻率越小抵消效果越弱,對標定方法誤差影響越大;但是當干擾運動頻率過大時(比如頻率等于1.5Hz),會造成作用在慣導上的角速度和線加速度極值過大,使估計結果發散。
5 結論
針對光纖陀螺慣導系統在晃動基座條件下的自標定問題,本文研究了一種基于最小二乘的濾波方法,以導航解算的位置誤差為觀測量,估計出慣導系統的18項誤差系數。該方法不需要引入外界信息,易于工程實現。同時,最小二乘方法對外界擾動作用有平滑效果,可以避免現有Kalman濾波方法由于環境擾動而造成的濾波發散問題。根據仿真結果分析,可以得出如下結論:
1)此方法能夠快速、準確估計出相關誤差系數,典型工況干擾運動條件下,加速度計零偏估計精度優于1.1μg,加速度計標度因數誤差估計精度優于1.5×10-6,加速度計標度不對稱誤差估計精度優于 1.8×10-6,陀螺零次項估計精度優于0.0014(°)/h,加速度計和陀螺安裝誤差估計精度優于 0.4″。
2)利用Monte Carlo仿真方法分析了不同海況條件運動的幅值和頻率對標定精度的影響,總結出了此動基座標定方法適用的海態干擾環境,對不同海態環境下的慣導自標定工程應用具有參考價值。