基于分段優(yōu)化的高速磁浮輔助停車(chē)區(qū)位置設(shè)置方法研究
2021-11-04 12:44:04吳冬華耿書(shū)恒侯圣杰薛健康徐洪澤
鐵道學(xué)報(bào) 2021年9期
吳冬華,田 毅,耿書(shū)恒,侯圣杰,薛健康 ,徐洪澤
(1.北京交通大學(xué) 電子信息工程學(xué)院, 北京 100044;2.中車(chē)青島四方機(jī)車(chē)車(chē)輛股份有限公司,山東 青島 266111)
輔助停車(chē)區(qū)(Assist Stop Area, ASA)是為了滿(mǎn)足高速磁浮列車(chē)發(fā)生異常情況無(wú)法停靠到前方車(chē)站需要臨時(shí)停車(chē)而在線(xiàn)路上設(shè)置的停車(chē)區(qū)域。在ASA中設(shè)有供電軌或軌旁無(wú)接觸供電裝置。高速磁浮列車(chē)的車(chē)載直線(xiàn)發(fā)電機(jī)只在列車(chē)運(yùn)行時(shí)才能滿(mǎn)足列車(chē)用電需求,當(dāng)列車(chē)在ASA停車(chē)后再啟動(dòng)運(yùn)行時(shí)仍需供電軌或軌旁無(wú)接觸供電等方式為列車(chē)補(bǔ)充提供電能。在上海高速磁浮線(xiàn)路中設(shè)置大量ASA。為了降低線(xiàn)路建設(shè)成本,ASA不適宜全線(xiàn)設(shè)置。ASA的設(shè)置位置和數(shù)量與列車(chē)安全懸浮曲線(xiàn)、安全制動(dòng)曲線(xiàn)、線(xiàn)路結(jié)構(gòu)等密切相關(guān),是高速磁浮的研究重點(diǎn)和難點(diǎn)之一[1]。
目前,研究人員從列車(chē)運(yùn)行控制方式、線(xiàn)路結(jié)構(gòu)等方面對(duì)ASA設(shè)置方法進(jìn)行了研究[2-7]。卞建光[2]建立了高速磁浮ASA位置生成算法,該算法根據(jù)安全懸浮曲線(xiàn)、安全制動(dòng)曲線(xiàn)計(jì)算了上海磁浮試驗(yàn)線(xiàn)ASA的設(shè)置位置。楊軻[3]建立了基于速度防護(hù)曲線(xiàn)的ASA位置生成算法,對(duì)滬杭線(xiàn)進(jìn)行了計(jì)算,并考慮了坡道對(duì)ASA設(shè)置的影響。虞翊等[4]提出一種基于基準(zhǔn)運(yùn)行速度曲線(xiàn)的ASA位置生成算法,并對(duì)多目標(biāo)速度曲線(xiàn)下ASA的設(shè)置位置進(jìn)行了分析。然而,目前的研究成果均未考慮道岔、彎道等線(xiàn)路結(jié)構(gòu)對(duì)ASA設(shè)置的影響,導(dǎo)致ASA位置生成算法不能完全滿(mǎn)足實(shí)際需求[8-10]。
本文根據(jù)道岔等線(xiàn)路結(jié)構(gòu)對(duì)ASA位置的要求和列車(chē)的實(shí)際運(yùn)行過(guò)程,提出一種基于分段優(yōu)化的ASA位置設(shè)置方法,為高速磁浮線(xiàn)路的建設(shè)提供參考。
1 分區(qū)交接及約束條件
1.1 停車(chē)點(diǎn)步進(jìn)控制過(guò)程分析
為了保證運(yùn)行安全,高速磁浮線(xiàn)路上設(shè)置有多個(gè)ASA。運(yùn)行控制系統(tǒng)采用將進(jìn)路不斷從一個(gè)ASA延伸到下一個(gè)ASA的方式以滿(mǎn)足列車(chē)持續(xù)前行的要求[11]。列車(chē)的加速、渦流制動(dòng)和滑行制動(dòng)特性可以通過(guò)實(shí)際車(chē)輛動(dòng)力學(xué)模型或?qū)嶒?yàn)測(cè)試的方式得到[12-15],在此基礎(chǔ)上可以計(jì)算出到每個(gè)ASA的安全制動(dòng)曲線(xiàn)、安全懸浮曲線(xiàn)和兩個(gè)車(chē)站之間的列車(chē)運(yùn)行速度曲線(xiàn)[2-4]。當(dāng)列車(chē)速度位于當(dāng)前ASA的安全制動(dòng)曲線(xiàn)以下和下一個(gè)ASA的安全懸浮曲線(xiàn)以上時(shí),可以進(jìn)行停車(chē)點(diǎn)步進(jìn)控制[4]。分區(qū)交接時(shí)停車(chē)點(diǎn)步進(jìn)控制曲線(xiàn)見(jiàn)圖1。
1.2 ASA計(jì)算約束條件
若車(chē)站A、B之間有n個(gè)ASA,定義A站往B站方向?yàn)檎颉.?dāng)列車(chē)正向運(yùn)行時(shí),可以計(jì)算出列車(chē)從A站開(kāi)往B站的運(yùn)行速度
(1)

(2)

(3)
若列車(chē)當(dāng)前目標(biāo)停車(chē)點(diǎn)為第i個(gè)ASA,其在位置scl的運(yùn)行速度為vcl,則需滿(mǎn)足
(4)

(5)
(6)

同理,當(dāng)列車(chē)反向運(yùn)行時(shí),列車(chē)從B站開(kāi)往A站的運(yùn)行速度為
(7)
(8)
(9)

若列車(chē)在運(yùn)行過(guò)程中的當(dāng)前ASA為第i個(gè),則列車(chē)在位置scl的運(yùn)行速度vcl需滿(mǎn)足
(10)

(11)
(12)
2 線(xiàn)路結(jié)構(gòu)對(duì)ASA的要求分析
2.1 線(xiàn)路結(jié)構(gòu)對(duì)ASA位置的要求
由于ASA承擔(dān)著異常情況下乘客疏散任務(wù),因此不宜設(shè)在線(xiàn)路條件復(fù)雜的位置。高速磁浮線(xiàn)路中包括道岔、彎道等多種結(jié)構(gòu),應(yīng)考慮線(xiàn)路結(jié)構(gòu)對(duì)ASA設(shè)置的要求,如:①在道岔前后,通常需設(shè)置ASA;②在大的彎道前后,通常需設(shè)置ASA[2-4]。
根據(jù)上述分析可知,高速磁浮線(xiàn)路道岔、彎道兩端布置的ASA受到線(xiàn)路結(jié)構(gòu)的約束,基本處于確定位置。高速磁浮線(xiàn)路的正線(xiàn)通常為復(fù)線(xiàn),在車(chē)站內(nèi)設(shè)置多條股道,道岔通常位于高速磁浮正線(xiàn)上靠近車(chē)站的兩端。彎道通常與線(xiàn)路建設(shè)時(shí)地形等要求相關(guān),一旦線(xiàn)路施工完畢,則彎道位置不會(huì)發(fā)生改變。因此,可以根據(jù)道岔、彎道的位置將整個(gè)高速磁浮線(xiàn)路分割為多個(gè)區(qū)段,在每個(gè)區(qū)段內(nèi)分別進(jìn)行ASA位置的優(yōu)化計(jì)算,進(jìn)而得到整個(gè)高速磁浮線(xiàn)路的ASA。
2.2 列車(chē)運(yùn)行過(guò)程及特征分析
列車(chē)運(yùn)行線(xiàn)路示意見(jiàn)圖2。列車(chē)從A站到達(dá)B站的一次運(yùn)行過(guò)程,可以分為以下3個(gè)階段。
圖2 列車(chē)運(yùn)行線(xiàn)路示意
階段1:從A站內(nèi)部的ASA啟動(dòng)出發(fā),加速運(yùn)行,通過(guò)道岔前端位置確定的ASA,進(jìn)入道岔。該階段中列車(chē)運(yùn)行特征為靜止到加速,運(yùn)行速度相對(duì)較低。
階段2:通過(guò)A站道岔,經(jīng)過(guò)道岔后端位置確定的ASA后進(jìn)入正線(xiàn),再經(jīng)過(guò)一系列加速、勻速、減速以及彎道,經(jīng)過(guò)B站內(nèi)道岔前端位置確定的ASA后進(jìn)入B站道岔。該階段中列車(chē)運(yùn)行特征為加速-勻速-減速。
階段3:通過(guò)B站道岔,經(jīng)過(guò)道岔后端位置確定的ASA后停車(chē)。該階段中列車(chē)運(yùn)行特征為減速到靜止。根據(jù)資料,在該階段線(xiàn)路中可以不設(shè)置ASA[2]。
列車(chē)從B站到A站反向運(yùn)行時(shí),運(yùn)行過(guò)程相同,只是階段1和階段3經(jīng)過(guò)的實(shí)際線(xiàn)路進(jìn)行了互換。
綜合列車(chē)在不同區(qū)段上的運(yùn)行特征,可以將ASA的位置設(shè)置方法分為兩類(lèi):
(1)在階段1中進(jìn)行ASA計(jì)算時(shí)需考慮正向運(yùn)行要求,在階段3中進(jìn)行ASA計(jì)算時(shí)需考慮反向運(yùn)行要求;考慮到列車(chē)在這兩個(gè)階段都是靜止-加速運(yùn)行,因此ASA的計(jì)算方法可以相同。
(2)在階段2進(jìn)行ASA計(jì)算時(shí)需考慮列車(chē)雙向運(yùn)行要求,所采用的計(jì)算方法有所不同。
3 ASA設(shè)置方法研究
3.1 不同階段的ASA位置優(yōu)化要求
本節(jié)根據(jù)列車(chē)運(yùn)行過(guò)程不同階段所劃分的區(qū)段進(jìn)行分析。
(1)階段1和階段3的ASA設(shè)置分析
在該階段列車(chē)運(yùn)行線(xiàn)路相對(duì)較短,列車(chē)在出站后4~12 km內(nèi)會(huì)經(jīng)過(guò)道岔,在道岔的前端會(huì)布置ASA。道岔附近的ASA位置與道岔位置密切相關(guān)。因此,該部分ASA的計(jì)算可以簡(jiǎn)化為固定長(zhǎng)度區(qū)段內(nèi)列車(chē)從靜止到加速過(guò)程中ASA設(shè)置問(wèn)題,重點(diǎn)研究列車(chē)加速對(duì)ASA位置設(shè)置的約束。該階段ASA設(shè)置位置的優(yōu)化目標(biāo)為列車(chē)在該階段的加速度值最小。
(2)階段2的ASA設(shè)置分析
在該階段列車(chē)運(yùn)行線(xiàn)路相對(duì)較長(zhǎng),兩端都會(huì)有根據(jù)道岔計(jì)算出確定位置的ASA。整個(gè)線(xiàn)路還可能有根據(jù)彎道等計(jì)算出的其他確定位置的ASA。因此,可以將該區(qū)段的ASA設(shè)置問(wèn)題簡(jiǎn)化為在固定長(zhǎng)度區(qū)段內(nèi)設(shè)置列車(chē)初速不為0的ASA。該階段ASA設(shè)置位置的優(yōu)化目標(biāo)為ASA數(shù)量最少和ASA之間的最大間距值最小。
3.2 基于分段優(yōu)化的高速磁浮ASA位置設(shè)置方法
基于分段優(yōu)化的高速磁浮ASA位置設(shè)置流程見(jiàn)圖3。
圖3 基于分段優(yōu)化的高速磁浮ASA位置設(shè)置流程
(1)基于加速度的ASA計(jì)算方法
通常道岔距離車(chē)站4~12 km,在該區(qū)段布置1~2個(gè)ASA。以列車(chē)在正向運(yùn)行為例,ASA計(jì)算的優(yōu)化目標(biāo)為
min(ayh)
(13)
如果只需要布置1個(gè)ASA,則ayh的約束條件為
(14)
(15)
(16)
(17)
(18)

如果需要布置2個(gè)ASA,則ayh的約束條件還需要增加
(19)
(20)
(21)

如果需要布置更多的ASA,則以此類(lèi)推,很容易得到更多的約束條件。其計(jì)算流程見(jiàn)圖4。
圖4 基于加速度的ASA計(jì)算流程
(2)基于位置平均的ASA計(jì)算方法
列車(chē)在階段2中經(jīng)過(guò)的區(qū)段內(nèi),如果直接采用平均布置ASA的方法,兩端的ASA可能會(huì)不滿(mǎn)足式(5)、式(6)、式(11)、式(12)。因此,本文建立了一個(gè)在階段2中的設(shè)計(jì)加速度比例參數(shù)ksj,采用該參數(shù)可以得到正向運(yùn)行時(shí)列車(chē)運(yùn)行速度
(22)
反向運(yùn)行時(shí)列車(chē)運(yùn)行速度為
(23)


(24)
(25)
(26)
(27)
優(yōu)化目標(biāo)為
(28)
式中:l1為ASA數(shù)量權(quán)值參數(shù);ito為ASA數(shù)量;l2為ASA間距權(quán)值參數(shù)。
上述模型的求解流程見(jiàn)圖5。
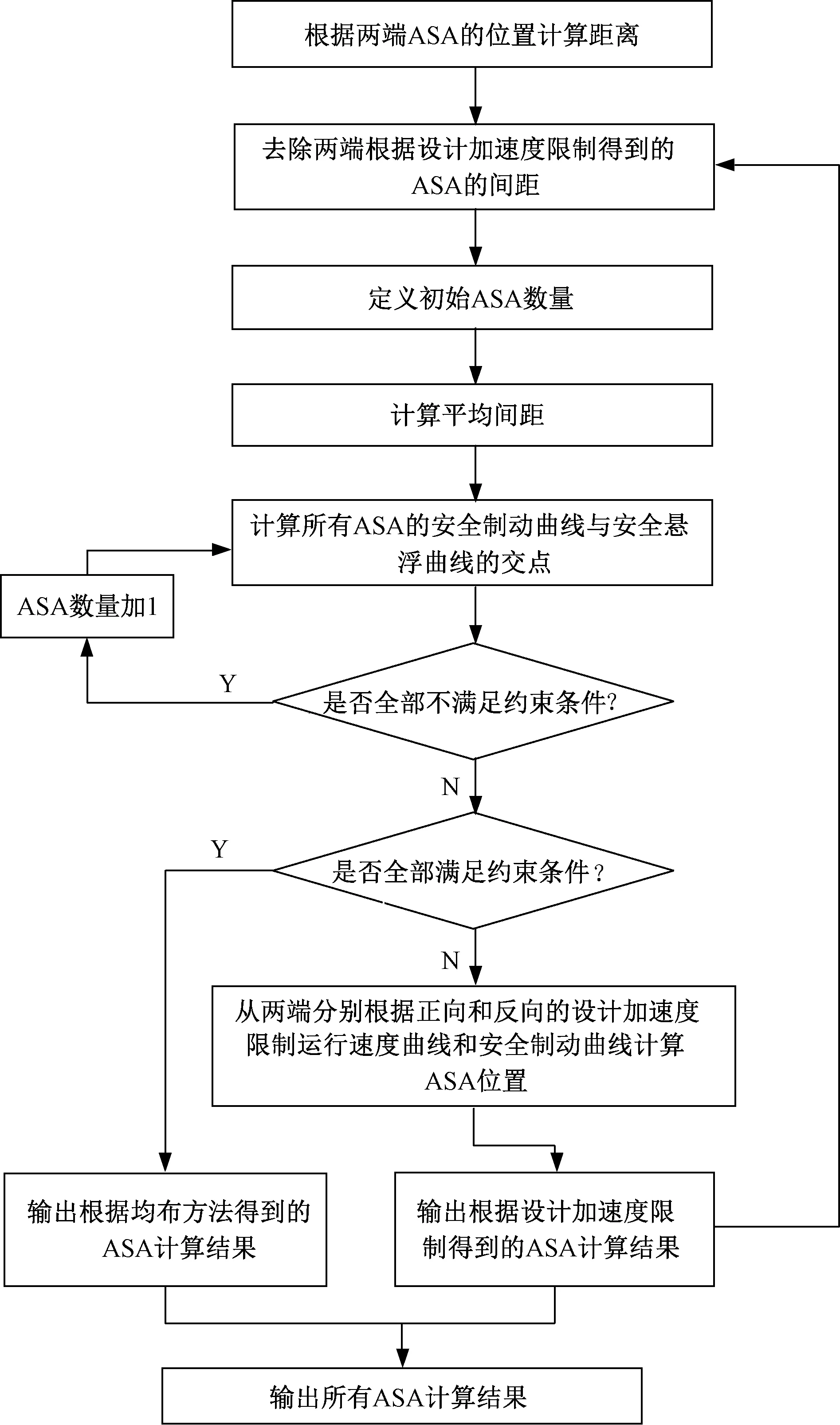
圖5 基于位置平均的ASA計(jì)算流程
(3)反向上第一個(gè)分區(qū)中ASA按照加速度的ASA計(jì)算方法從反向上進(jìn)行計(jì)算。
4 計(jì)算結(jié)果及分析
4.1 階段1中區(qū)段的ASA位置及分析
加速階段中道岔位置為5 km時(shí),階段1中區(qū)段上ASA位置計(jì)算結(jié)果見(jiàn)圖6。
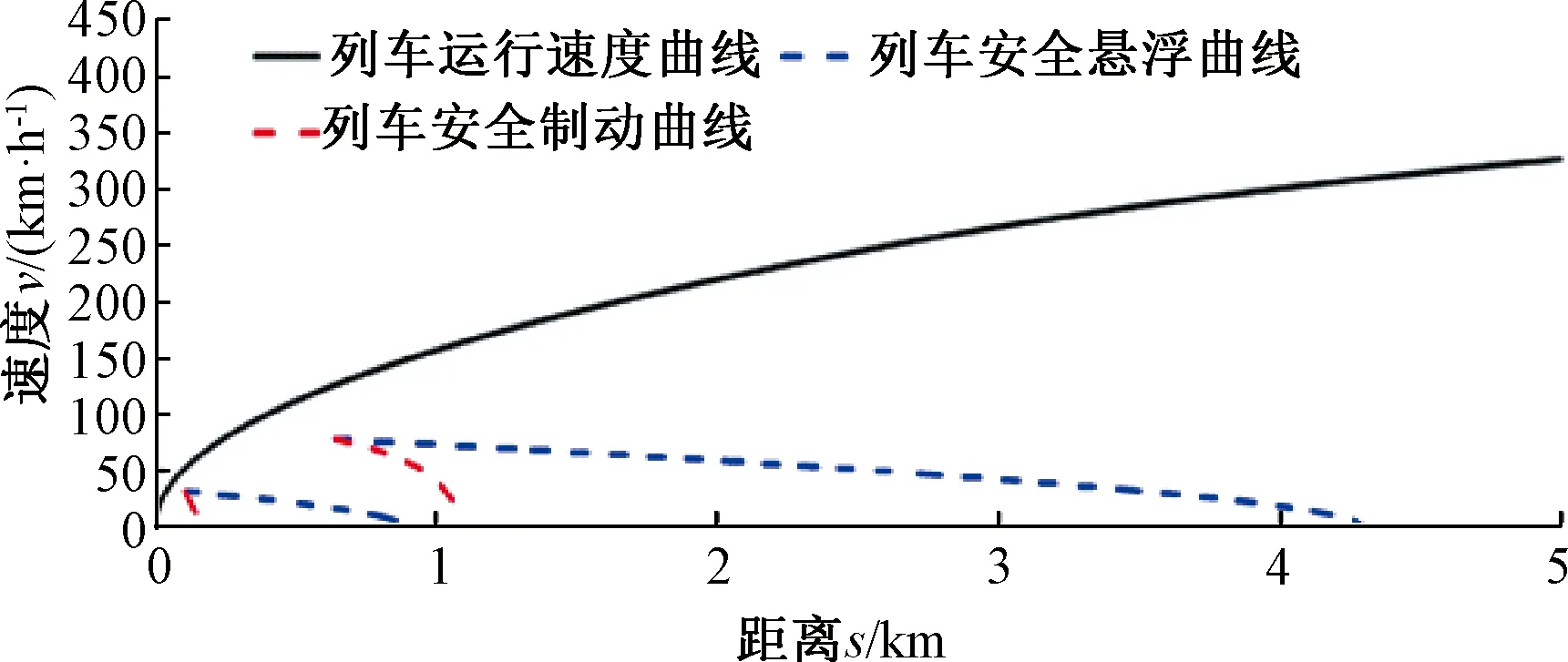
圖6 階段1中區(qū)段上ASA位置計(jì)算結(jié)果(道岔位置5 km)
從圖6可以得到,第1個(gè)ASA中心位置為0.981 km,第2個(gè)ASA中心位置為4.392 km,設(shè)計(jì)加速度的優(yōu)化結(jié)果為0.379 4 m/s2。根據(jù)文獻(xiàn)[2]中列車(chē)在不同速度區(qū)間的牽引加速度限制,可以得到列車(chē)在從靜止到達(dá)第1個(gè)和第2個(gè)ASA的過(guò)程中,牽引系統(tǒng)在加速過(guò)程中加速度限制的變化范圍在0.615~0.618 m/s2之間,有利于牽引系統(tǒng)性能發(fā)揮。
本文建立的基于加速度的ASA計(jì)算方法,能夠得到合理的ASA位置,使得列車(chē)在站內(nèi)等場(chǎng)所從靜止開(kāi)始加速到固定的ASA的區(qū)間內(nèi),牽引系統(tǒng)在加速過(guò)程中的加速度限制變化范圍更加小。
當(dāng)?shù)啦砦恢迷?~6 km之間時(shí),在階段1中采用的設(shè)計(jì)牽引加速度的優(yōu)化結(jié)果見(jiàn)表1。
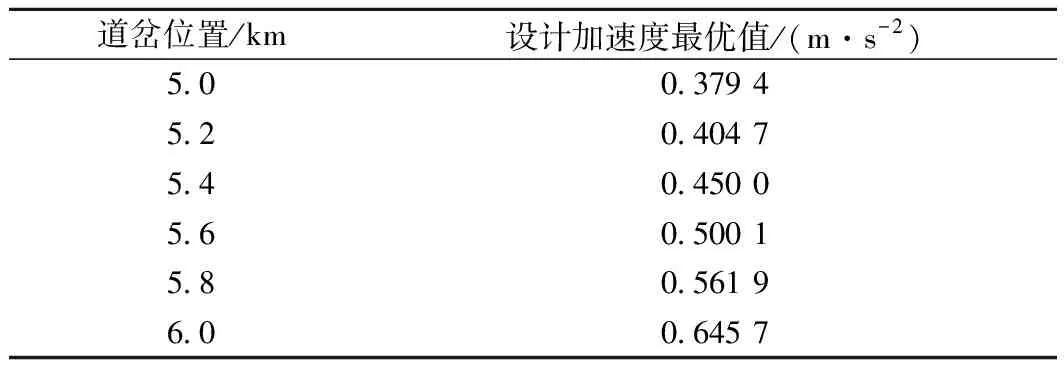
表1 設(shè)計(jì)加速度最優(yōu)值隨道岔位置變化的計(jì)算結(jié)果
由表1中可見(jiàn),隨著道岔位置的增加,ASA的間距越大,設(shè)計(jì)加速度也會(huì)逐步增大,使得牽引系統(tǒng)允許的加速度變化范圍越小,影響高速磁浮運(yùn)行時(shí)刻表的設(shè)計(jì)。
4.2 階段2中區(qū)段的ASA位置及分析
在階段2中,當(dāng)線(xiàn)路兩端兩個(gè)道岔確定的ASA間隔為40 km,設(shè)計(jì)加速度比例參數(shù)為0.9、0.5時(shí),ASA的計(jì)算結(jié)果見(jiàn)圖7。為了更好地表示各個(gè)ASA的曲線(xiàn),圖7中將第一個(gè)ASA的位置向右移動(dòng)了5.5 km。
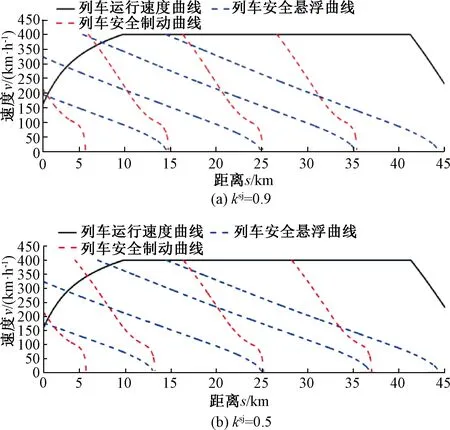
圖7 設(shè)計(jì)加速度比例參數(shù)不同時(shí)階段2中區(qū)段上ASA位置
由圖7可見(jiàn):
(1)第1個(gè)ASA與第2個(gè)ASA、第4個(gè)ASA與第5個(gè)ASA之間的間隔相同。這是因?yàn)樵摼€(xiàn)路采用雙向運(yùn)行,在同樣的線(xiàn)路條件下,兩端的ASA對(duì)稱(chēng),因此間隔相同。
(2)第2個(gè)ASA和第3個(gè)ASA、第3個(gè)ASA與第4個(gè)ASA的間隔相同,這是因?yàn)榛谖恢闷骄腁SA計(jì)算方法在進(jìn)行優(yōu)化時(shí),將滿(mǎn)足限制條件的ASA進(jìn)行了平均分布計(jì)算。
(3)當(dāng)設(shè)計(jì)加速度比例參數(shù)從0.9減小到0.5時(shí),在5.5 km處的第1個(gè)ASA與第2個(gè)ASA之間的間隔變小;第2個(gè)ASA與第3個(gè)ASA之間的間隔變大,從10.117 km增加到11.761 km;第1個(gè)ASA終點(diǎn)的安全制動(dòng)曲線(xiàn)與第2個(gè)ASA的安全懸浮曲線(xiàn)以及列車(chē)運(yùn)行速度曲線(xiàn)包圍部分的面積變大。這是因?yàn)樵O(shè)計(jì)加速度比例參數(shù)值越小,第1個(gè)ASA終點(diǎn)的安全制動(dòng)曲線(xiàn)與基于設(shè)計(jì)加速度限制值計(jì)算出的列車(chē)運(yùn)行速度曲線(xiàn)的交點(diǎn)的速度越小,進(jìn)而采用該交點(diǎn)和安全懸浮曲線(xiàn)計(jì)算得到的下一個(gè)ASA位置距離變小;當(dāng)ASA數(shù)量不變時(shí),前后兩個(gè)ASA之間的間距變小,則中間兩個(gè)ASA的間距就會(huì)變大。
采用基于位置平均的ASA計(jì)算方法能夠?qū)SA盡量平均的分布在整個(gè)區(qū)段上,使得列車(chē)緊急停車(chē)后,再次采用維護(hù)運(yùn)行時(shí)對(duì)車(chē)載蓄電池的要求統(tǒng)一。
4.3 50 km平直線(xiàn)路計(jì)算示例
采用一條50 km的高速磁浮平直線(xiàn)路進(jìn)行計(jì)算,列車(chē)商業(yè)運(yùn)行速度為400 km/h,道岔出現(xiàn)在距離A站5、45 km處,設(shè)計(jì)加速度比例參數(shù)值為0.85,ASA的計(jì)算結(jié)果見(jiàn)圖8。

圖8 50 km平直線(xiàn)路中ASA計(jì)算結(jié)果
從圖8中可以得到,建立的基于分段優(yōu)化的ASA位置設(shè)置方法,通過(guò)將線(xiàn)路上道岔位置對(duì)ASA位置設(shè)置限制約束轉(zhuǎn)化為不同區(qū)段上分別進(jìn)行優(yōu)化計(jì)算的方式,最終得到最合理的ASA設(shè)置位置。
5 結(jié)論
本文設(shè)計(jì)了基于分段優(yōu)化的ASA位置設(shè)置方法,利用線(xiàn)路上道岔、彎道位置對(duì)ASA位置設(shè)置的限制約束,通過(guò)已確定的ASA位置將整個(gè)高速磁浮線(xiàn)路分割為不同的區(qū)段,并分別進(jìn)行優(yōu)化計(jì)算,最終得到整個(gè)線(xiàn)路上最合理的ASA設(shè)置位置。提出了兩種ASA優(yōu)化計(jì)算方法:
(1)基于位置平均的ASA計(jì)算方法,在滿(mǎn)足停車(chē)點(diǎn)步進(jìn)的要求下將ASA盡量平均分配在整個(gè)線(xiàn)路上。該方法可以根據(jù)磁浮線(xiàn)路實(shí)際情況,通過(guò)調(diào)整設(shè)計(jì)加速度比例參數(shù)值實(shí)現(xiàn)速度曲線(xiàn)的包圍范圍和ASA位置間距的調(diào)整。
(2)基于加速度的ASA計(jì)算方法,解決了列車(chē)在站內(nèi)等場(chǎng)所從靜止開(kāi)始加速到固定ASA區(qū)間內(nèi)的ASA布置問(wèn)題。
基于分段優(yōu)化的ASA位置設(shè)置方法為高速磁浮輔助停車(chē)區(qū)的位置設(shè)置提供了新的思路,為高速磁浮線(xiàn)路設(shè)計(jì)提供了指導(dǎo)。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
少先隊(duì)活動(dòng)(2021年4期)2021-07-23 01:46:22
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
攝影之友(影像視覺(jué))(2019年3期)2019-03-30 01:36:50
沈陽(yáng)醫(yī)學(xué)院學(xué)報(bào)(2015年1期)2015-12-27 13:44:40
醫(yī)學(xué)教育管理(2015年3期)2015-12-01 06:43:16
現(xiàn)代企業(yè)(2015年2期)2015-02-28 18:45:09
