基于SVM分類受電弓振動干擾信號識別
2021-11-04 08:03:00丁宇鳴劉金朝徐曉迪張文軒楊志鵬
鐵道學報 2021年9期
丁宇鳴,劉金朝,徐曉迪,張文軒,楊志鵬
(中國鐵道科學研究院集團有限公司 基礎設施檢測研究所, 北京 100081)
自廣深鐵路開始,我國在提速干線、高速鐵路上開始推廣錨段關節式電分相,以滿足在列車高速運行時受電弓平穩通過的要求[1]。然而,這種過分相方式在電氣上暴露出了新的問題。
某關節式電分相示意見圖1。在位置2和位置3之間,接觸線與中性線平行懸掛。在該區段,兩根導線導高相同,受電弓同時接觸2根導線,在一段時間后過渡為僅接觸中性線的狀態,因此該區段被稱為等高區。同樣位置4與位置5之間也是等高區。在位置3與位置4之間由于沒有任何電氣連接,因此被稱為無電區。弓頭在經過位置2、3、4、5時處于機車惰行狀態,經過位置1、6時由于發生電力機車或動車組離網斷電和重新進網帶電合閘,會產生暫態過程,形成電磁干擾[2]。
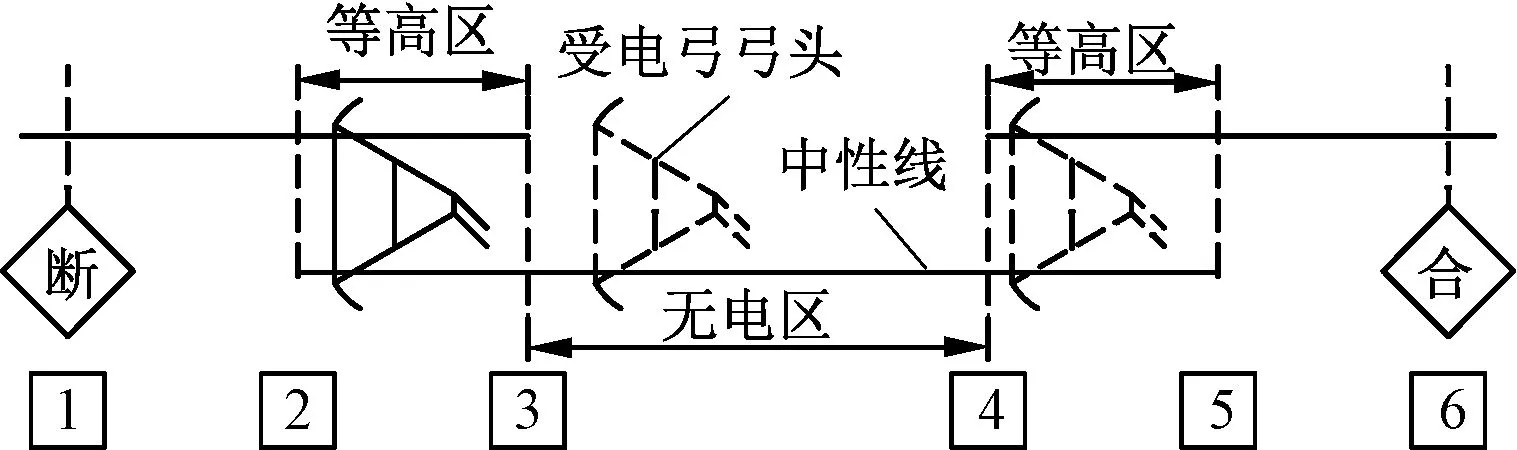
圖1 關節式電分相示意圖
同時接觸網檢測車附掛在運營的普速列車尾部,因此用于檢測接觸網硬點的檢測車受電弓在電力機車斷開主斷路器時,其與電力機車工作受電弓的間距隨電力機車與檢測車之間的車廂節數的變化而變化。這導致電力機車斷開主斷路器時的電磁干擾信號位置難以確定。
當這些干擾信號超過了所設的閾值被誤判為偏差時,會造成人力物力的浪費,進而導致接觸網養護維修的效率降低。因此,對現場環境下受電弓振動信號中干擾信號進行準確、有效識別是非常必要的。
針對電磁暫態過程中的過電壓問題,宮衍圣[3]進行了過電壓機理分析,對電力機車斷電之后惰行通過電分相過程中的各工作狀態進行了系統建模,并對不同工作狀態轉換時出現的暫態過程進行了過電壓仿真。文獻[4-5]在惰行通過電分相的暫態過程分析基礎上,增加了對電力機車離網斷電和重新進網帶電合閘時的暫態過程分析。蘇立軒等[6]對列車離網斷電、通過無電區時以及重新進網帶電合閘時的暫態過程進行了數學分析和瞬態電磁影響測試。高國強等[7]分析了影響過電壓的因素,并提出了限制過電壓的措施。
針對斷路器開關時產生的電磁干擾。文獻[8-9]建立了斷路器開關電弧引起的電磁輻射干擾模型,并對輻射場進行了模擬計算。文獻[10-11]針對斷路器開斷過程不同的電流區域提出不同的黑盒模型。
以上這些文獻均是針對電學方面,即發生暫態過程時對電路中電壓或電流數據進行了分析。然而目前鮮有科研人員對暫態過程中其他傳感器受到的電磁干擾進行深入研究。而受電弓弓頭的沖擊加速度是對接觸網進行動態檢測的主要檢測參數[12]。因此,由電磁干擾所引起的加速度中大量異常數據也會對后續的接觸網硬點診斷造成很大影響。
針對干擾信號處理,相關科研人員做了大量研究。袁力等[13]對數據進行信噪分離,運用二值法提取頻譜中干擾信號,但是此方法中選用的信噪分離方法對微弱信號的檢測能力相對較差。Antonini等[14]提出了一種基于小波包的干擾信號特征提取方法,并對提取的特征進行分類,以識別可能的干擾原因,但該方法在壓縮和去噪中的閾值選擇規則或分類中的參數或非參數方法的選擇等問題仍在研究中,其應用目前是由經驗驅動的。Moore等[15]、Mariscotti等[16]分別分析了電磁干擾的頻域特性和時頻特性,但并未研究如何識別時域上的電磁干擾。Azpúrua等[17]采用經驗模態分解(EMD)和瞬態模態分解相結合的方法來分離復雜電磁干擾的主要成分,但經驗模態分解(EMD)需要消耗大量時間,因此該方法也不滿足工程在線應用的要求。
針對設備運行狀態的識別,武立平等[18]提取振動信號多個參數,作為SVM特征量,對若干樣本進行了分類。但過多的特征量在處理大量數據時運算復雜度高,不滿足工程在線應用的要求。
基于以上分析,本文提出通過計算接觸網沖擊指數確定偏差位置,再計算各偏差位置的加速度衰減系數,并通過多組已確定是否為電磁干擾的樣本作為訓練集,加速度最大幅值和加速度衰減系數作為預測變量,基于SVM分類訓練出模型,以判斷各樣本是否為電磁干擾。
1 沖擊指數法
由于受電弓垂向加速度具有很強隨機性,因此采用接觸網沖擊指數法將原始數據從高頻解調成高穩定性的低頻信號,更利于確定接觸網硬點缺陷的位置。
接觸網沖擊指數法詳細計算步驟如下:
Step1計算受電弓垂向振動加速度的移動有效值
(1)
式中:Sr為移動有效值的集合,r=1,2,…,N-K+1;K為向前加窗的窗長;xi為濾波后的受電弓垂向振動加速度波形信號的集合,i=1,2,…,N,N為受電弓垂向振動加速度波形信號的個數。
Step2將接觸網劃分成單元,單元長度一般取為50 m。
Step3計算各單元移動有效值的最大值Smax,記為單元有效值。

Step5計算接觸網沖擊指數CII為
(2)
Step6超限判斷,并記錄對應的位置信息[19]。
利用接觸網沖擊指數法分析某線路。2次通過K862+886附近的受電弓垂向振動加速度波形及對應的接觸網沖擊指數見圖2。圖2(a)、圖2(b)中為采樣頻率Fs=5 000 Hz 2次檢測的原始數據,對比2張圖可以看出受電弓垂向振動加速度信號幅值隨機性較大,難以確定評判閾值。使用以能量角度刻畫的接觸網沖擊指數法對兩段數據分別進行計算(取K=300)得到圖2(c)、圖2(d),可以觀察到該處出現3個獨立的較大峰值,而且波形相似,并且歸一化處理后評判指標的分布特性相同。由此表明本文提出的評判方法是穩定的,而且具有很好的重復性。再利用其分布規律自然較容易確定評判閾值。根據對大量測試數據的計算分析,閾值取4.0。
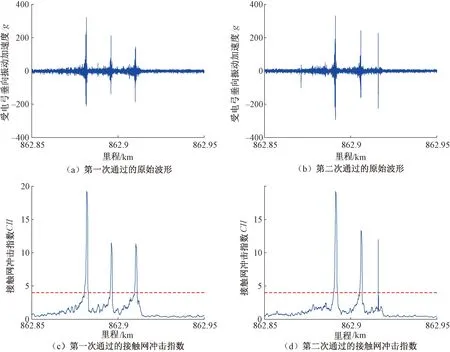
圖2 2次通過K862+886附近的受電弓垂向振動加速度波形及對應的接觸網沖擊指數
2 加速度衰減系數
接觸網沖擊指數雖然具有良好的重復性,但是當其超限時,難以判斷是由客觀存在的缺陷引起的還是由干擾信號造成的。
缺陷處、干擾信號處接觸網沖擊指數見圖3。由圖3可見,該缺陷處與干擾信號處的接觸網沖擊指數均遠遠超出閾值,且數據特征較為相似,因此僅憑接觸網沖擊指數難以判斷偏差是否是由干擾信號導致,還需要分別對2種情況的原始信號數據進行分析。
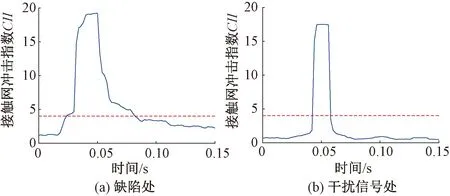
圖3 缺陷處、干擾信號處接觸網沖擊指數
缺陷處、干擾信號處加速度衰減波形圖見圖4。由圖4(a)可見,當受電弓通過客觀存在的缺陷時,原始信號振幅會逐漸減小,經過一段時間,克服外界阻力做功,振動才會衰減到一個正常的較小的范圍。而當偏差波形是由電磁干擾引起時,瞬時的電磁干擾導致傳感器出現如圖4(b)所示瞬時的異常大值,然后瞬間恢復正常。通過現場復核發現,具備這種波形特征的偏差處均不存在硬點缺陷。
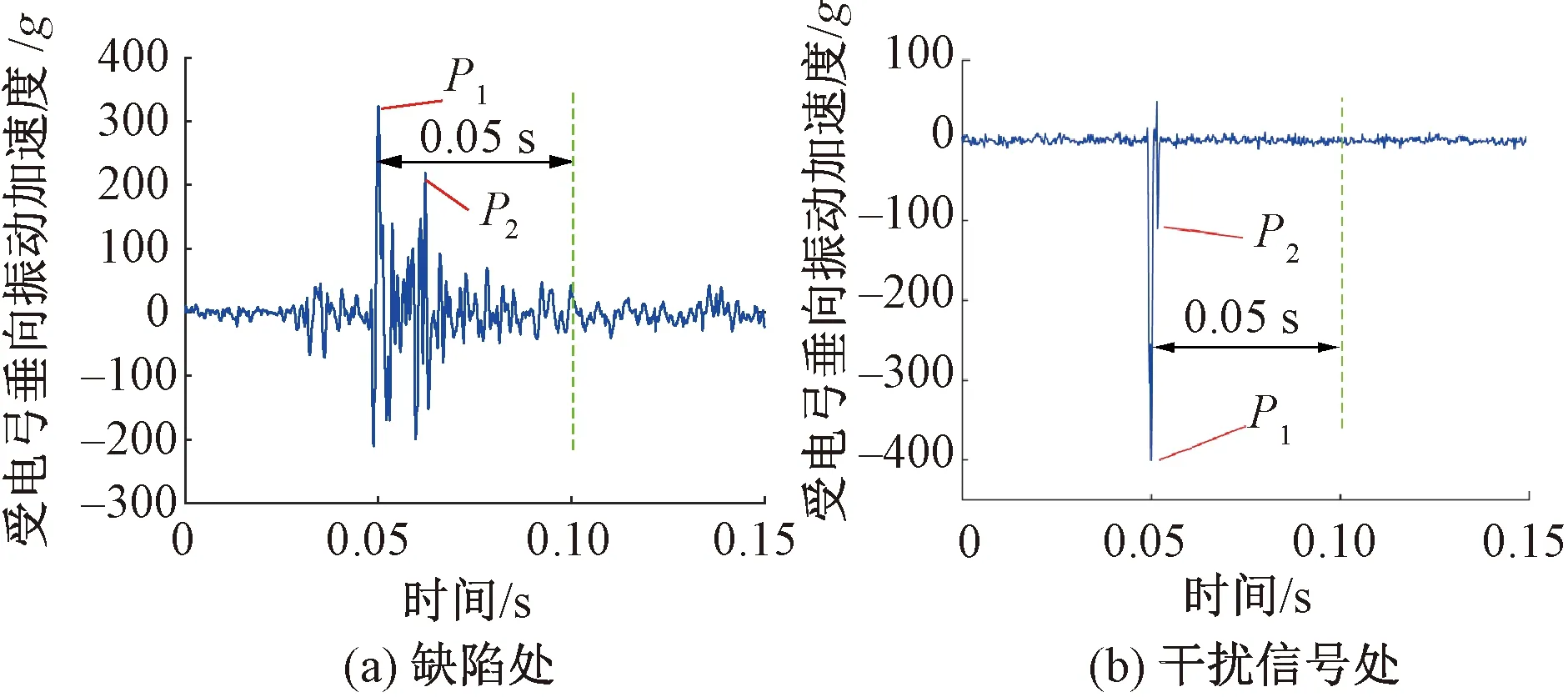
圖4 缺陷處、干擾信號處加速度衰減波形圖
基于圖4這種不同的數據特性,計算偏差位置處受電弓垂向振動加速度的最大幅值P1與加速度數據穿過橫坐標后一定時間內的最大幅值P2之比(根據對大量測試數據的計算分析,對該時間范圍取為0.05 s),記加速度衰減系數R為
(3)
3 基于SVM分類受電弓振動干擾信號識別方法
3.1 SVM分類的原理
支持向量機(Support Vector Machine, SVM)是一類按監督學習方式對數據進行二元分類的廣義線性分類器,其決策邊界是對學習樣本求解的最大邊距超平面[20-22]。
給定輸入數據和學習目標X={X1,…,XN},y={y1,…,yN}(Xi∈Rn;yi∈{-1,+1})若樣本線性可分,則支持向量機將分類問題轉化為求解凸二次優化問題
(4)
式中:ω為權重;C為懲罰因子;ξ為松弛因子;b為偏置常數。
所得最優分類決策函數為
sign[yi(ω·Xi+b)]
(5)
當多項式核的階不為1時,可得到非線性SVM。
非線性SVM優化問題為
(6)
所得最優分類決策函數為
sign[yi(ω·φ(Xi)+b)]
(7)
3.2 基于SVM的干擾信號識別
根據對大量測試數據的計算分析,干擾信號的接觸網沖擊指數往往會遠遠超出閾值,但也有少數較為嚴重的缺陷處接觸網沖擊指數也會遠遠超出閾值,因此僅憑接觸網沖擊指數難以判定出偏差是否是由干擾信號導致,而針對不同嚴重程度的缺陷,其原始信號的加速度衰減系數的分布也有所差異。故將第1節和2節中提出的接觸網沖擊指數和加速度衰減系數構成信號特征向量,作為SVM分類的輸入樣本,具體過程見圖5。
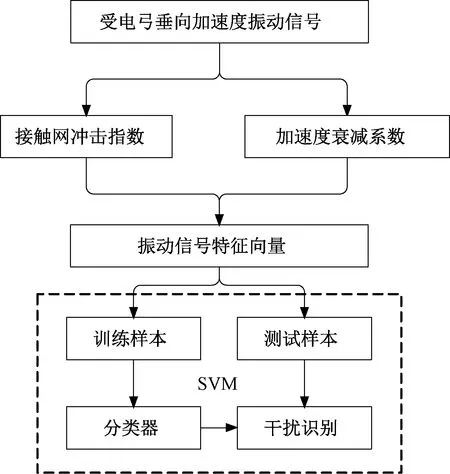
圖5 干擾信號識別流程圖
如圖5,首先基于受電弓垂向加速度振動信號,提取偏差處最大幅值和受電弓出現最大幅值后0.05 s內最大幅值,將最大幅值與受電弓出現最大幅值后0.05 s內最大幅值之比記為加速度衰減系數,將接觸網沖擊指數和加速度衰減系數作為振動信號特征向量。提取多組已確定是否為干擾信號的振動信號特征向量分別作為SVM 分類的訓練樣本和測試樣本,訓練樣本通過經驗風險和結構風險最小化原理訓練得到特征向量和干擾狀態參數之間的決策函數。再應用于測試樣本,得到測試樣本的分類結果和模型預測的準確率。
4 應用實例
4.1 實驗驗證與分析
為了驗證所提出方法的有效性,采用接觸網檢測車對多條鐵路線路進行檢測。接觸網硬點測量組件安裝于檢測列車受電弓弓頭滑板的2個支撐點位置。其中加速度傳感器的采樣頻率為5 000 Hz,采樣范圍為-100g~100g。
基于傳感器采集到的受電弓垂向振動加速度,計算各線路的接觸網沖擊指數,篩選出了其中142處超過管理值的振動信號作為樣本,通過人工復核判斷每處超限是否為真實的缺陷,如果是真實存在的缺陷,那么記該組樣本狀態函數值為1,如果現場復核未發現缺陷卻在波形中出現一個瞬時大值,即該位置數據存在干擾信號,記其狀態函數值為-1。確定好每組狀態函數值后,將所有樣本分為訓練樣本和測試樣本,其中111組為訓練樣本,31組為測試樣本。

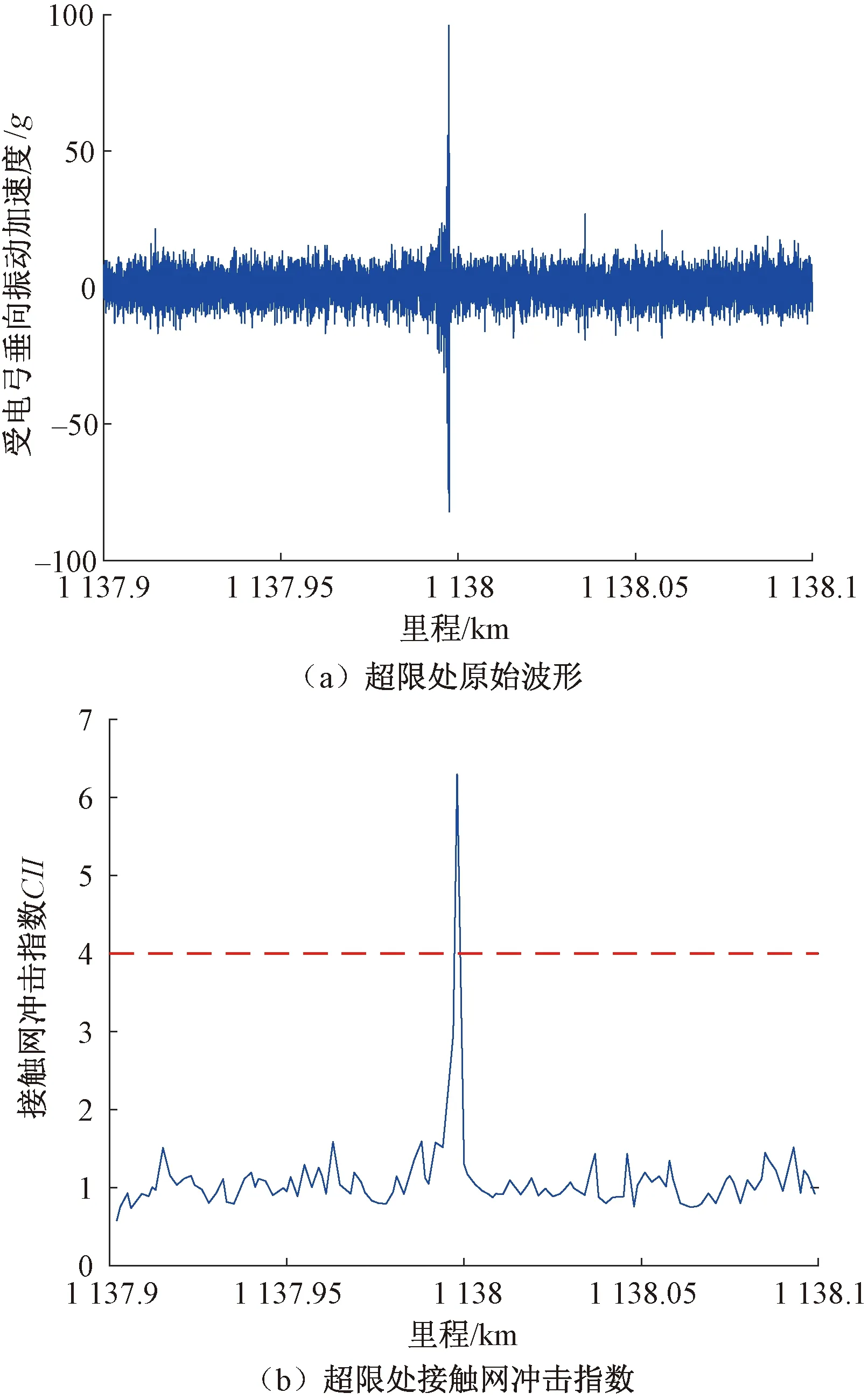
圖6 超限處原始波形及對應的接觸網沖擊指數
對該處超限原始波形進行深入分析,見圖7。該處最大幅值P1=96.02g,0.05 s范圍內最大幅值P2=82.01g,計算得到加速度衰減系數R=1.17。
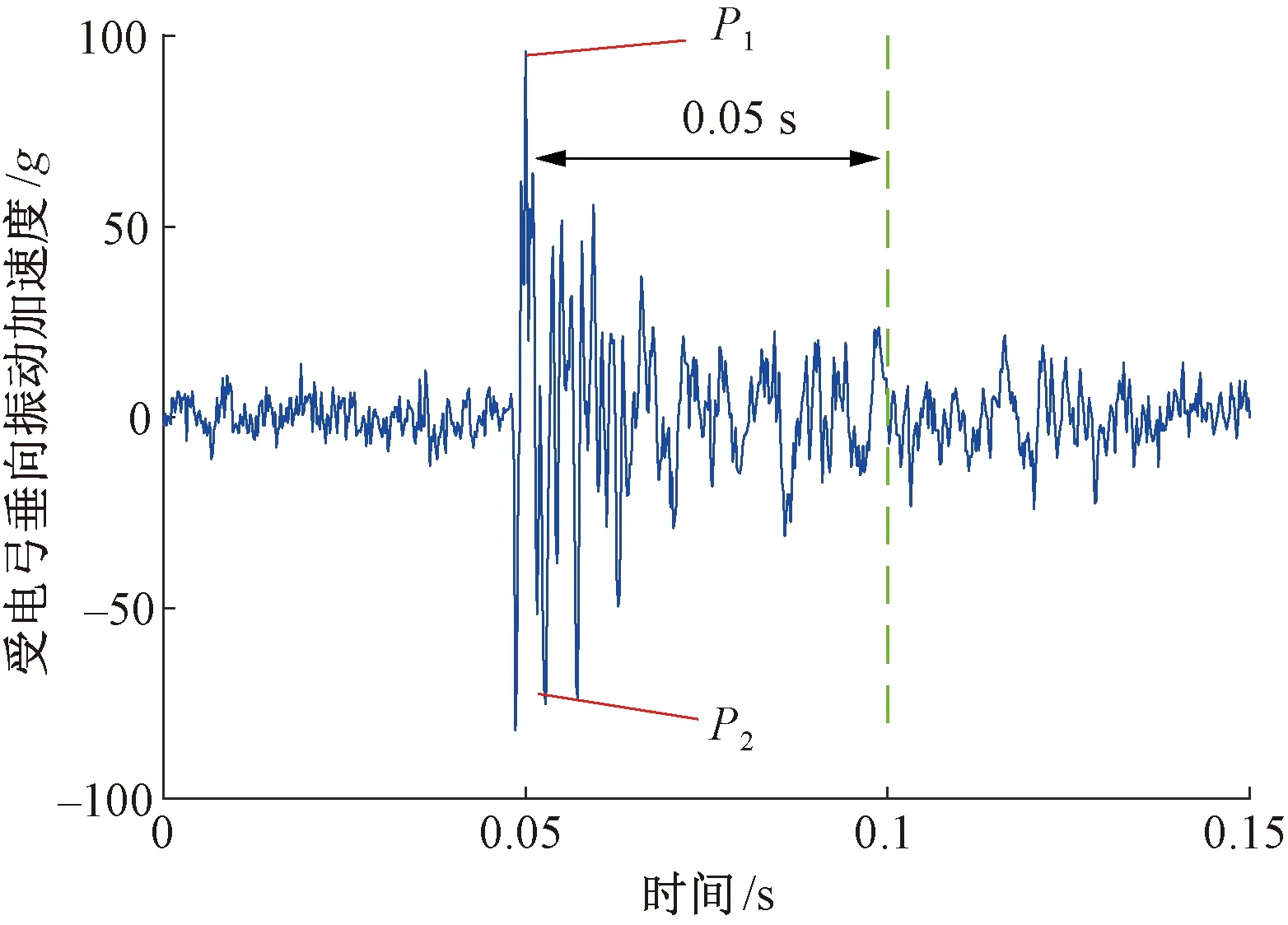
圖7 超限處加速度衰減波形圖
對該處超限進行現場復核,在定位點旁發現嚴重的導線扭面,這表明該處超限為真實的缺陷。記該組樣本狀態函數值為1。
將訓練樣本的接觸網沖擊指數和加速度衰減系數設為預測變量,將用于判斷樣本是否為干擾信號的狀態函數設為響應。并采用10折交叉驗證法,作為對算法準確性的估計。
原始數據集中不同類別的分布,見圖8。由圖8可見,-1類的數據點分布區域與1類的數據點有所不同。
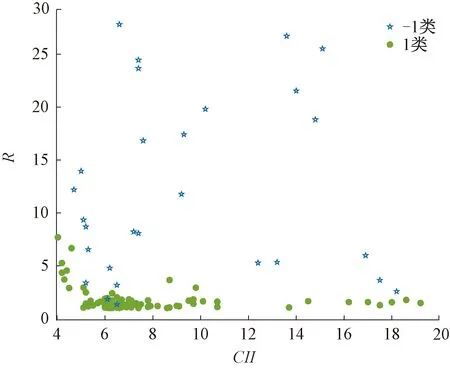
圖8 原始數據集
運用多種SVM分類方法對訓練數據進行訓練,得到各模型準確率見表1。

表1 多種SVM模型準確率 %
由表1可知,由精細高斯SVM分類方法訓練的模型準確度最高,三次和線性SVM其次。
因此,運用精細高斯SVM訓練出的模型見圖9。采用精細高斯SVM分類方法對訓練集進行訓練。
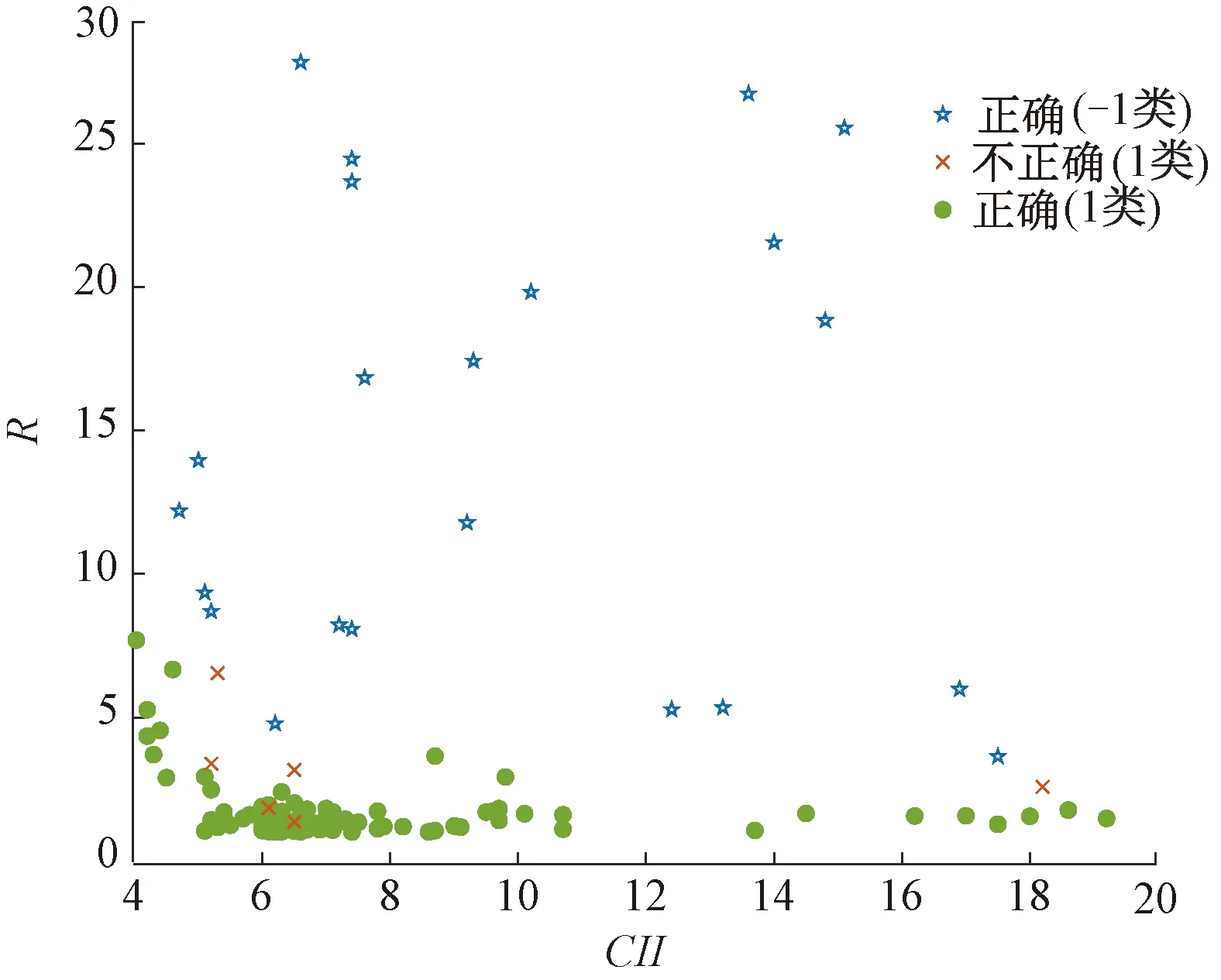
圖9 運用精細高斯SVM訓練的模型
模型的混淆矩陣見圖10,圖10中4個區域依次為:TN為真負樣本;FP為假正樣本;FN為假負樣本;TP為真正樣本。其中左上角和右下角的綠色區域代表樣本預測正確,而左下角和右上角區域代表預測錯誤,由圖10可見,僅有6個負樣本被誤判為正樣本。對這些樣本進行分析可見:其中4個樣本是由于在0.05 s范圍內恰好出現了兩次幅值相當的電磁干擾,1個樣本是由于該電磁干擾幅值較小,沖擊指數最大的1個樣本則是由于電磁干擾恰好出現在了一個振動幅值較大的病害附近。造成錯誤預測的情況都較為罕見。
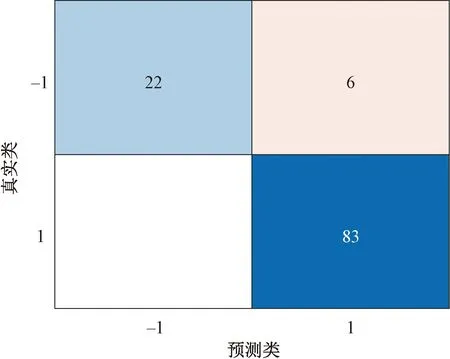
圖10 模型的混淆矩陣
由圖10混淆矩陣中的TP、FN、FP、TN4個參數值可計算真正率TPR和假正率FPR為
(8)
由TPR和FPR繪制成的ROC曲線見圖11,ROC曲線圍成面積為AUC,圖中顯示該模型的AUC=0.94,這表示模型分類效果很好。
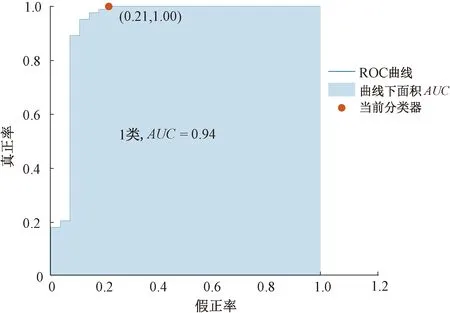
圖11 模型的ROC曲線
將模型導出,并將測試樣本的預測變量CII、R以及響應導入模型,得到預測的響應,與已知類別的響應進行計算驗證,得到準確率為96.77%。
由散點圖、混淆矩陣和根據ROC曲線計算出的曲線下面積AUC以及測試樣本的準確度,可知該模型在進行判斷偏差是否為瞬態電磁干擾的準確率較高。
4.2 對比傳統帶通濾波干擾信號識別方法
為了驗證所提出方法的優勢,與傳統帶通濾波干擾信號識別方法對比。
通過對若干硬點缺陷數據進行時頻分析,見圖12。能量主要分布在20~800 Hz,對111組訓練樣本進行帶通濾波。
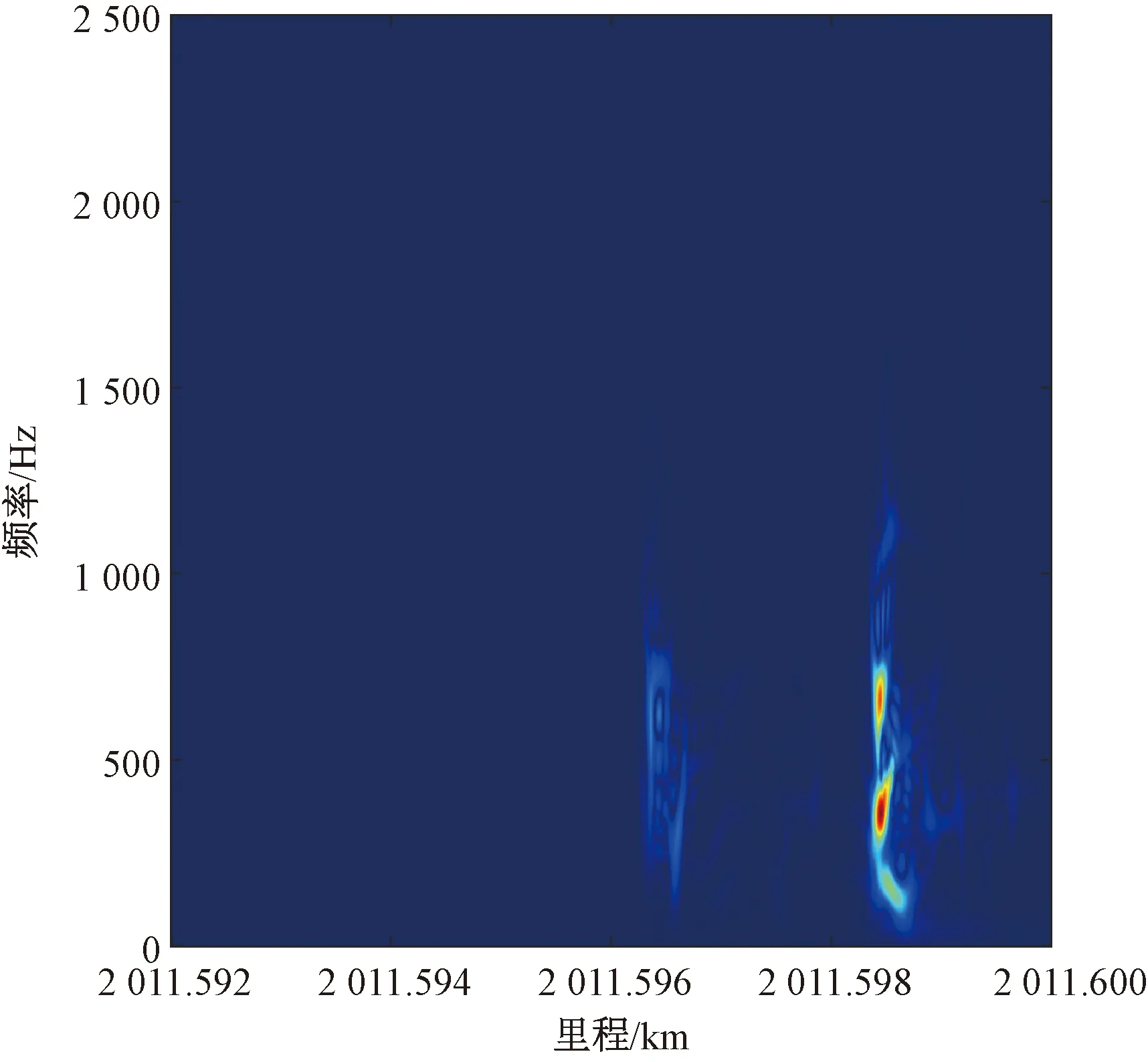
圖12 硬點缺陷數據時頻圖
將訓練樣本的加速度衰減系數和濾波后計算得到的加速度衰減系數設為預測變量,用于判斷樣本是否為干擾信號的狀態函數設為響應。并采用10折交叉驗證法,作為對算法準確性的估計。
運用精細高斯SVM訓練出的模型見圖13。由圖13可見,與本文方法相比,該模型預測錯誤的數量較多。
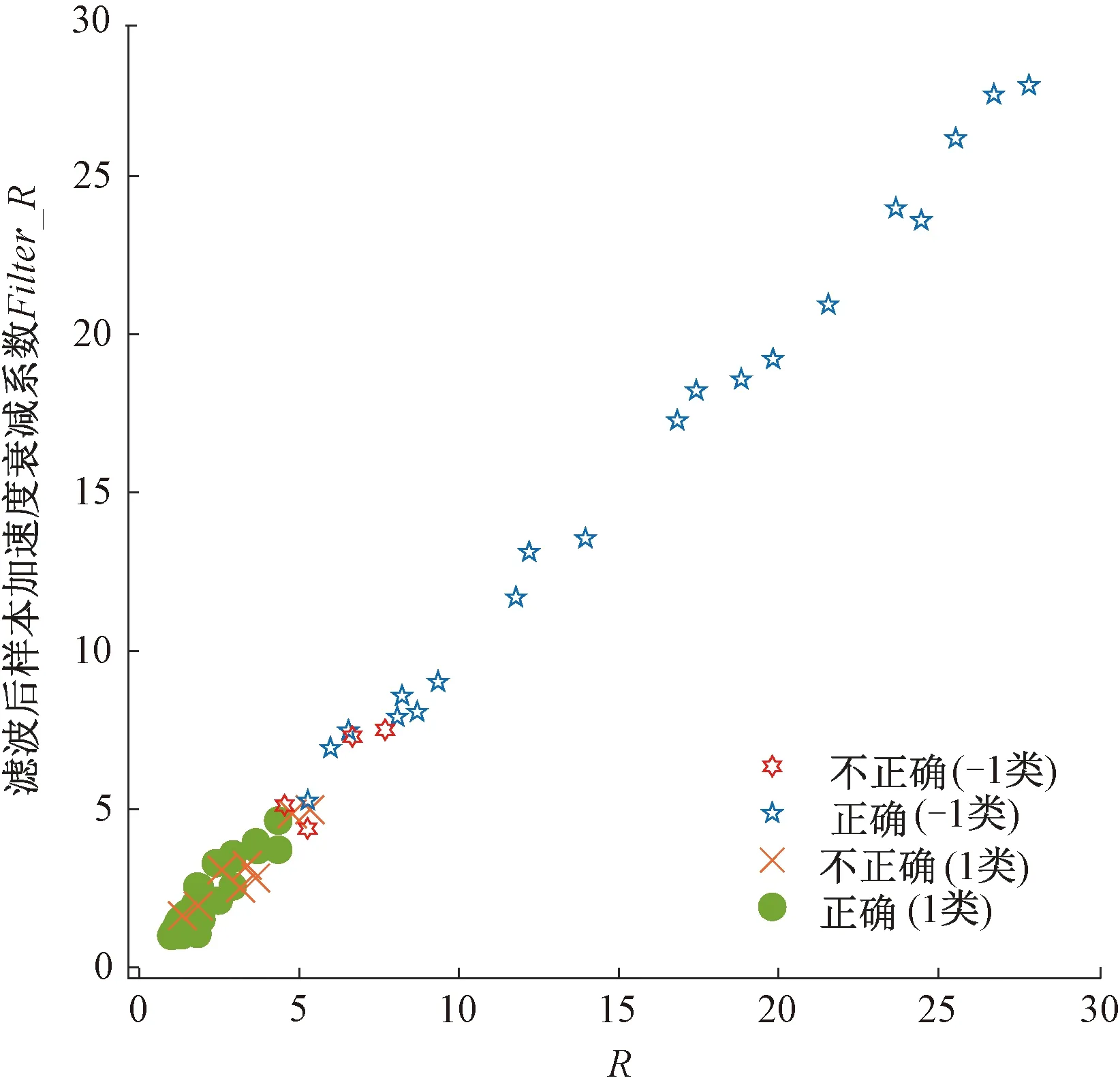
圖13 運用精細高斯SVM訓練出的模型
該模型的ROC曲線見圖14。由圖14可見,該模型的AUC=0.90,低于本文提出的方法。
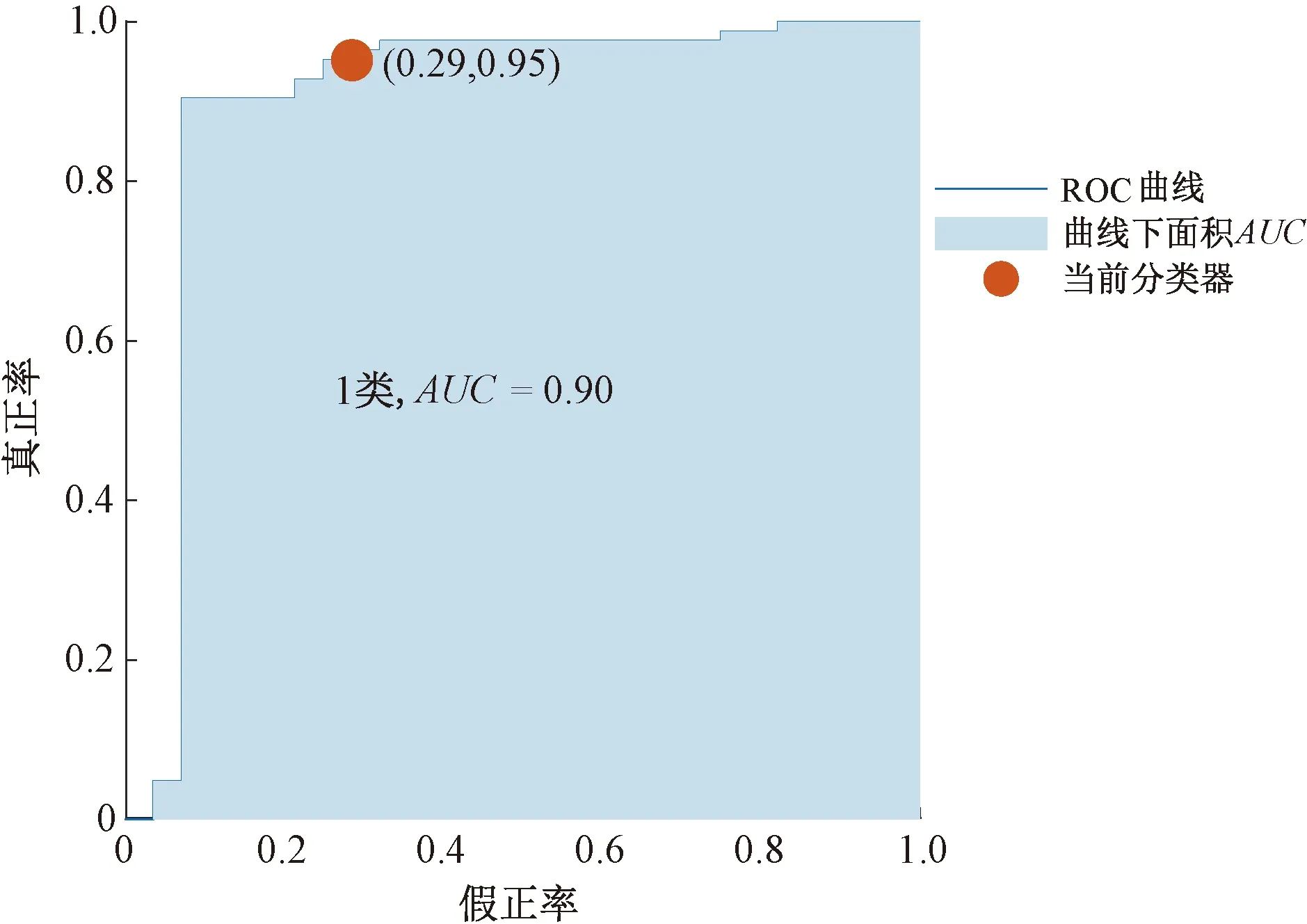
圖14 模型的ROC曲線
對若干干擾信號數據進行時頻分析,見圖15。由圖15可見,單個干擾信號的頻率范圍分布較廣,在20~800 Hz范圍內存在大量能量。因此僅憑帶通濾波無法去除干擾信號,這導致模型預測結果不夠精確,見圖13,在濾波后干擾信號的加速度衰減系數并沒有顯著的下降。
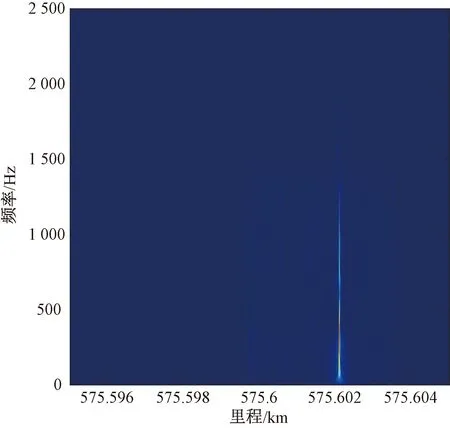
圖15 干擾信號時頻圖
僅將加速度衰減系數作為預測變量已能篩選出大部分干擾信號,但針對加速度衰減系數偏小的干擾信號不能做到很好的識別。而本文所提出方法將接觸網沖擊指數也設為一個預測變量,能夠很好反映缺陷引起弓網間沖擊的特性。實驗證明本文方法識別效果優于傳統帶通濾波識別方法。
5 結論
本文以識別受電弓振動信號中的干擾信號為目的,提出了基于SVM受電弓振動干擾信號識別方法,通過計算接觸網沖擊指數確定偏差位置,再計算各偏差位置的加速度衰減系數,將2個指標共同作為預測變量,訓練多組已知是否為電磁干擾的樣本,得到SVM分類模型。通過算例分析、多個指標的評判、以及測試集的驗證,結果表明該方法AUC達到0.94,對比傳統的帶通濾波干擾信號識別方法效果更佳,能很好的判斷偏差是否為瞬態電磁干擾,更好地指導接觸網養護維修,滿足工程在線應用的要求。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學大眾(2023年17期)2023-10-26 07:39:14
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
天天愛科學(2020年6期)2020-09-10 07:22:44
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
數學物理學報(2017年6期)2018-01-22 02:26:40
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
