CFAR算法對多環境下的目標檢測
2021-11-03 09:24:00南開大學濱海學院
電子世界 2021年18期
南開大學濱海學院 張 喆
為解決毫米波雷達對某個環境下探測的反射回波信號,并利用多普勒頻率進行雷達對目標徑向運動時的檢測和速度產生的估計問題,本文提出了基于線性調頻連續波(Linear Frequency Modulated Continuous Wave,LFMCW)毫米波雷達,采用利用多周期雙通道得到的相位變化信息結合多維頻譜分析(1D-FFT和2D-FFT)以及恒虛警檢測(constant false alarm rate,CFAR)實現了對徑向運動目標的檢測以及較為精準的速度估計,并分析了對多目標,多環境下的處理特征和檢測,最后通過仿真實驗和實際測試對算法檢測效果和準確度進行驗證。實驗結果表明,該算法在多環境多目標下檢測和速度的估計方面準確性較高。
在復雜環境下的目標檢測中,毫米波雷達對回波信號實現恒虛警檢測將具有一定的困難且難以取得良好的效果。對于隨機雜波干擾信號,采用功率檢測門限會產生大量的虛警和檢測率的下降,在實際操作中無法應用。然而,CFAR檢測算法可以對雜波情況下進行目標檢測。它采用與待檢參考單元相鄰的參考單元進行檢測,得到背景噪聲功率估計值,再與門限因子相乘得到功率檢測門限,從而避免大量虛警的產生。常見的CFAR檢測算法有單元平均恒虛警檢測(cell averaging constant false alarm rate,CA-CFAR)、最大恒虛警檢測(greatest test of constant false alarm rate,GO-CFAR)和最小選擇恒虛警檢測(smallest test of constant false alarm rate,SO-CFAR)。
針對以上問題,本文對兩種環境下測量的回波數據做了CFAR檢測,通過仿真實驗和實測數據處理,直觀地表明CFAR常見算法在兩種環境下對目標的檢測優略。
1 毫米波雷達
毫米波雷達是工作頻率在30-300GHz探測雷達,毫米波雷達具有體積小、質量輕和空間分辨率高的特點。與傳統的雷達相比,毫米波雷達穿透能力強,具有全天候、高分辨率、可測速以及可測距等功能的檢測傳感器,毫米波雷達能分辨識別很小的目標,而且能同時識別多個目標,常用與軍事和民用兩大領域。與此同時,毫米波雷達常常用于交通、安防、生命體征檢測等多方位領域。
2 CFAR算法
利用77G毫米波雷達測量的回波中含有豐富的目標信息,但是由于噪聲的干擾且噪聲具有不可預測性,需要過濾噪聲干擾獲取所需目標信息,處理得到頻譜信息后,依然存在較多的干擾信息導致無法檢測到目標。基于上述問題,CFAR算法在處理過程中具有很好的優勢,其原理是根據檢測在實際場景中干擾的波動,從而選擇與之對應的檢測門限值來完成對多環境條件下目標的檢測。CFAR具有較強的穩定性,在保持較理想的虛警概率和漏檢概率的情況下,還能保持接收機穩定狀態,CA-CFAR是其最基本的算法。
假設雜波幅度為x,雜波標準差為δ,噪聲概率密度函數f0(x)服從瑞利分布,則:

假設檢測門限為x0,被判斷為目標信號的條件是大于x0。則誤判雜波為目標信號的概率為:

從算法實現不同CFAR可分為三種:單元平均恒虛警、最大選擇恒虛警和最小選擇恒虛警。
單元平均恒虛警檢測的原理是首先對參考單元的功率求取平均值,然后估計干擾功率,進而算出檢測門限值,原理圖如1所示:
由圖1可知一維CA-CFAR窗有M個參考單元、2個保護單元和待檢單元xi。
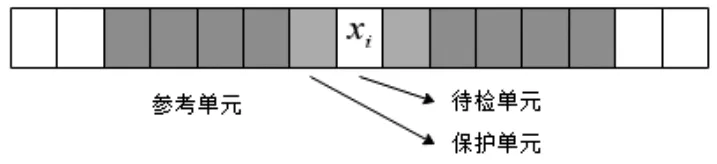
圖1 1-D CA-CFAR窗
如果噪聲干擾為獨立同分布時,噪聲功率為β2/2,則待檢測單元概率函數為:

當把這M個獨立同分布的參考單元結合時,則xn的聯合概率函數為:


又知檢測門限的概率密度函數為:

計算這個積分得到最終結果為:

根據上式推導結果可得虛警概率PFA只由門限因子k與M個參考單元決定,跟具體環境中的噪聲干擾無關。
門限因子為:
圖2為二維CA-CFAR目標檢測原理圖。
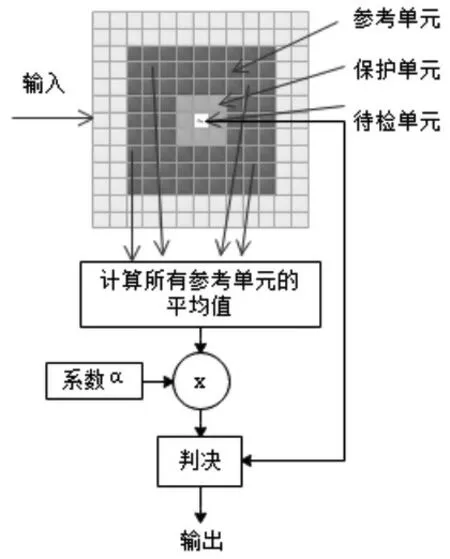
圖2 二維CA-CFAR檢測原理圖
3 仿真分析
數據模型為模擬均勻情況下,平面上距離雷達處分別存在靜止的多目標,距離分別為100m、150m、520m、600m、800m和900m,設置高斯隨機噪聲,處理數據結果如圖3、圖4所示。
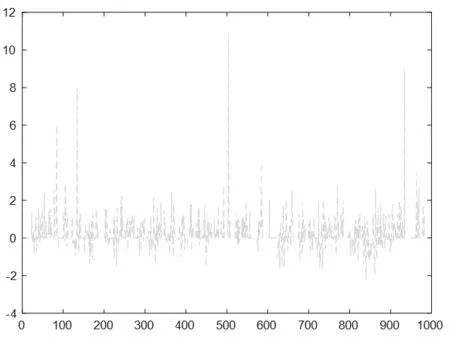
圖3 均勻情況下多目標示意圖
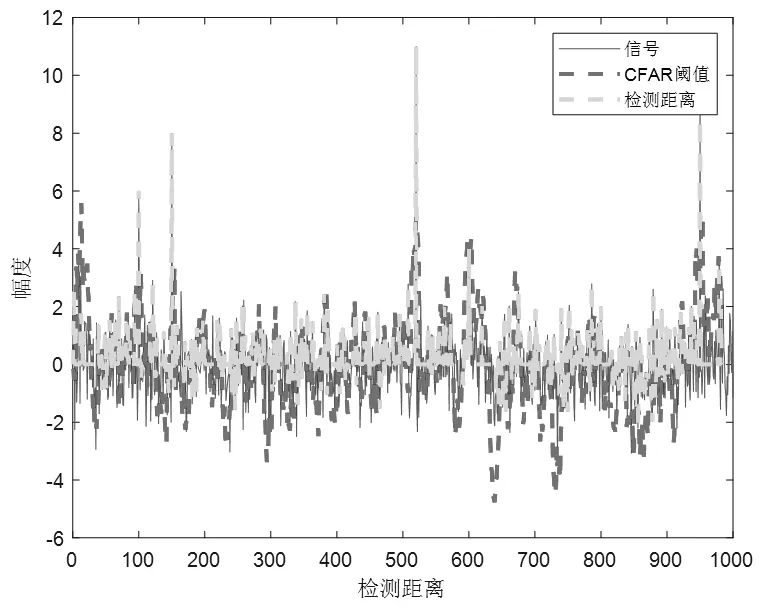
圖4 均勻情況下CFAR處理后示意圖
數據模型為模擬雜波情況下,雜波平面上距離雷達50m處存在靜止目標,雷達參數設置為:最大檢測距離為Rmax= 100m,最大檢測速度為Vmax= 100m/s,速度分辨率為Vdr= 3m/s,經過處理結果如圖5、圖6和圖7所示。
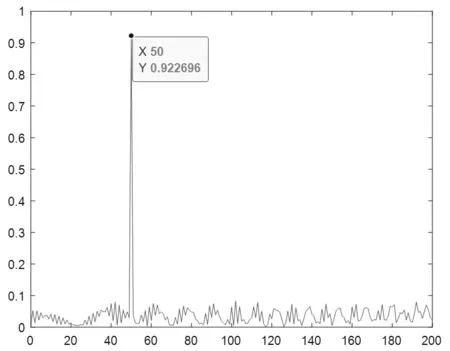
圖5 一維FFT的距離和速度
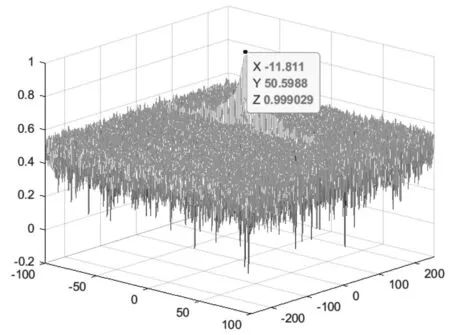
圖6 二維FFT的距離和速度
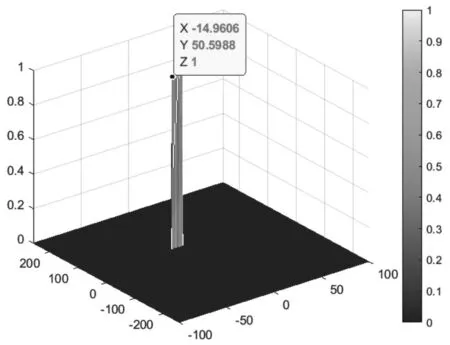
圖7 CFAR處理結果示意圖
4 實測數據驗證
使用77G毫米波雷達在室外均勻環境下和雜波環境下所測得實驗數據進行驗證分析,均勻環境情況下處理結果如圖8和圖9所示。雜波環境下處理結果如圖10所示。
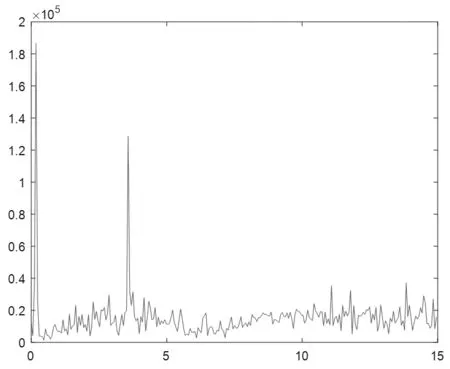
圖8 一維FFT的距離和速度

圖9 二維CFAR結果示意圖
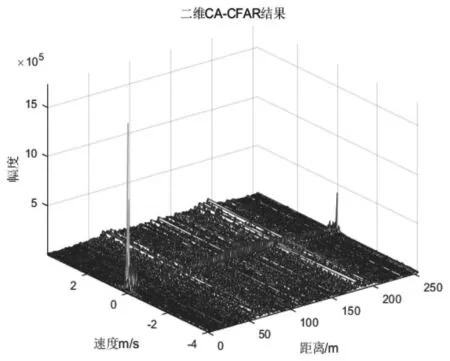
圖10 二維CA-CFAR結果示意圖
本文提出了基于多周期雙通道得到的相位變化信息,結合多維頻譜分析和恒虛警檢測算法在多環境下使用毫米波雷達對徑向運動目標進行檢測以及較為準確的速度估計,同時通過仿真實驗和實際測量數據驗證了本文算法的有效性、可靠性以及準確性。該目標檢測和速度估計的算法可為安防交通體系的毫米波雷達信號處理算法提供有價值的參考。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
中國生殖健康(2019年11期)2019-01-07 01:28:02