L波段高空探測系統的時差及其測量不確定度
2021-11-02 01:36:18梁靜舒王海深胡姮
氣象科技 2021年5期
關鍵詞:測量
梁靜舒 王海深 胡姮
(中國氣象局氣象探測中心,北京 100081)
引言
高空氣象觀測是氣象業務的基礎之一,是天氣預報、氣候分析、科學研究和國際交換氣象情報和資料的主要來源[1]。L波段高空探測系統是高空氣象觀測的重要組成部分,也是我國自主研制的新一代探空系統。該系統由數字探空儀和二次測風雷達構成,具有探測精度高、采樣速率快、使用方便等特點,實現了高空氣象探測儀器的數字化和自動化[2-3]。試驗結果表明,L波段高空探測系統較59-701高空探測系統所測的溫度、高度資料更穩定、離散率更小,對提高預報準確率有利[2];在溫度較低的對流層上層,GTS1型電子探空儀測定的濕度數據較59型探空儀更加精確[3]。
L波段高空探測系統雖然具有很多優越性, 但在探測精度方面仍有一定局限性,尤其是在氣壓和高度方面[4-5]。研究表明,L波段電子探空儀氣壓值一直較RS92型探空儀偏低,系統差絕對值在低層要高于高層[6];L波段高空探測系統所反映出的測高偏差隨探測高度的增加而不斷變大;L波段雷達和GTS1型探空儀測量高度差值隨探空儀的升高而逐漸增大[5];還有研究對L波段高空探測系統的測風算法提出了改進方法[7-8]。
探空儀需要在運動狀態中測量氣象要素,若地面計算機軟件賦予探空儀測量要素的時間與測量元件感應的時間不一致,其測量結果就無法正確地反映氣象要素的實際變化,并由此造成測量誤差。
分析L波段GTS1型探空儀和地面數據處理軟件的時序安排發現,探空儀和地面數據處理軟件都有測量與賦時不同步的問題,該問題也通過GTS1型探空儀與芬蘭RS92型探空儀的同球比對施放試驗得到了證明。通過進一步分析計算確認,L波段雷達高空探測系統由于測量與賦時不同步造成的氣象要素測量結果不確定度是不可忽視的,亟需改進探空儀及其數據處理軟件。針對北斗-GPS雙模式探空測風系統設計,本文提出了該問題的改進方法。
1 L波段高空探測系統的時序設計
L波段高空探測系統的時序設計包括探空儀和探空數據處理軟件兩部分,下面分別對上述兩部分的時序設計進行分析。
1.1 探空儀
探空儀的時序設計,主要考慮探測敏感元件感應氣象要素的時間與發射機發出的時間之間是否有時間差。目前業務應用的L波段探空儀主要是GTS1型探空儀,廠方發布的電路圖如圖1所示。
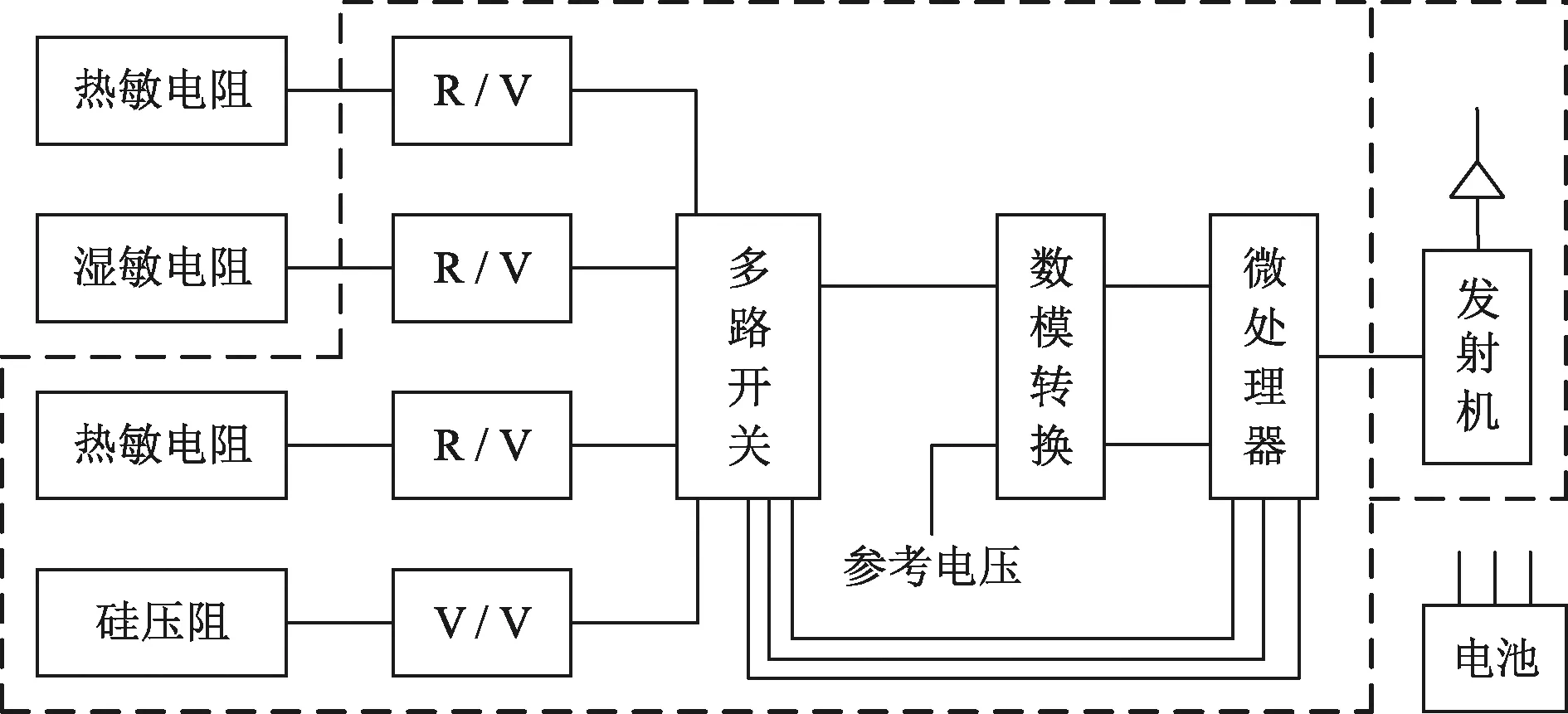
圖1 GTS1型電子探空儀的電路原理
可以看出,4個測量元件經三路電阻-電壓轉換,一路電壓-電壓轉換,再經“多路開關”的排序進入“模數轉換”,將電壓信號變為數字信號,然后進入“微處理器”(即單片計算機),顯然采用的是串行體制,必須經過一段時間才能將四路氣象信號傳入微處理器。此后在微處理器中設置了1個“更新單元”,即1個數據儲存器,探空儀測量電路的輸出,周期性地推向這個儲存器,使儲存器中的數據始終是最新的一組。GTS1型探空儀更新單元的更新周期為1.2 s。
探空儀的信號發射由單片計算機的程序控制,其時間分配為0.2 s發送氣象數據,0.8 s用于雷達測距,1 s為1個重復周期。在發送氣象數據時從“更新單元”中取出氣象數據,以發射機的調制信號發出。
由于氣象數據的“更新單元”1.2 s更新1次。而取出數據發射的時刻,由單片計算機軟件給出的時標確定,為1 s 1次。這樣,在不考慮測量傳感器本身滯后的情況下,探空儀這種時序安排就使得氣象要素的感應時間與實際發出的時間之間產生了在0~1.2 s變化的時間差。
1.2 數據處理軟件
L波段雷達探測系統的數據處理軟件在時序安排上,采用了探空儀的做法,同樣設計了一個“更新單元”,其更新周期同樣為1.2 s。L波段軟件從氣象信號的接收到賦時的基本流程是:探空信號由接收機接收、變換后輸入探空儀廠家提供的“軟件包”(即解碼單元)變為氣象信號,然后存入“更新單元”等待讀取。數據處理計算機產生連續不斷的秒間隔信號,到“更新單元”中去取氣象數據,取來后賦予計算機的時間,分辨力為1 s。
地面軟件的設計采用了與探空儀相同的方式。不論軟件是否讀取數據,氣象數據在“更新單元”中每間隔1.2 s更新1次,與讀取的時間無關。這樣,顯然又造成了在0~1.2 s變化的時間差。
由于更新單元為1.2 s更新1次,數據處理軟件1秒取1次數據,這就不可避免地會出現在1個周期內取2次相等數據的情況,由于只有0.2 s之差,發生這種情況的概率并不大。但在探空信號受到干擾,每組的標志碼不能檢出時,“更新單元”中的數據就不會變化了。這就是業務探空中,氣象要素曲線出現直線(不變)的原因。


2 時差所致探空測量結果隨機變化
由于探空儀敏感元件感應氣象參數的時間與賦予的時間之間存在誤差,而該時差在0~2.4 s之間隨機變化,必然引起探測數據的起伏。在業務探測時,因為沒有標準值,這種情況很容易被忽略。
2013年12月,中國氣象局在廣東陽江進行了北斗-GPS雙模式導航測風探空儀與芬蘭RS92型探空儀的比對試驗,業務L波段雷達-GTS1型電子探空儀探測系統也參加了試驗。采用同球施放的方法得到了2種探空系統之間的比對試驗結果。
以RS92型探空系統的測量結果作為參考標準值,計算L波段雷達探測系統所測溫度、氣壓和濕度的誤差。為便于分析和研究,將L波段探測系統探空儀測量至軟件賦時的時間差造成數據隨機波動的情況放大,只取每次施放從地面至升空后90 s的比對結果,制作L波段高空探測系統與RS92型探測系統間的誤差曲線分布。同球施放共40次,溫度、氣壓和濕度的誤差分布如圖2所示。
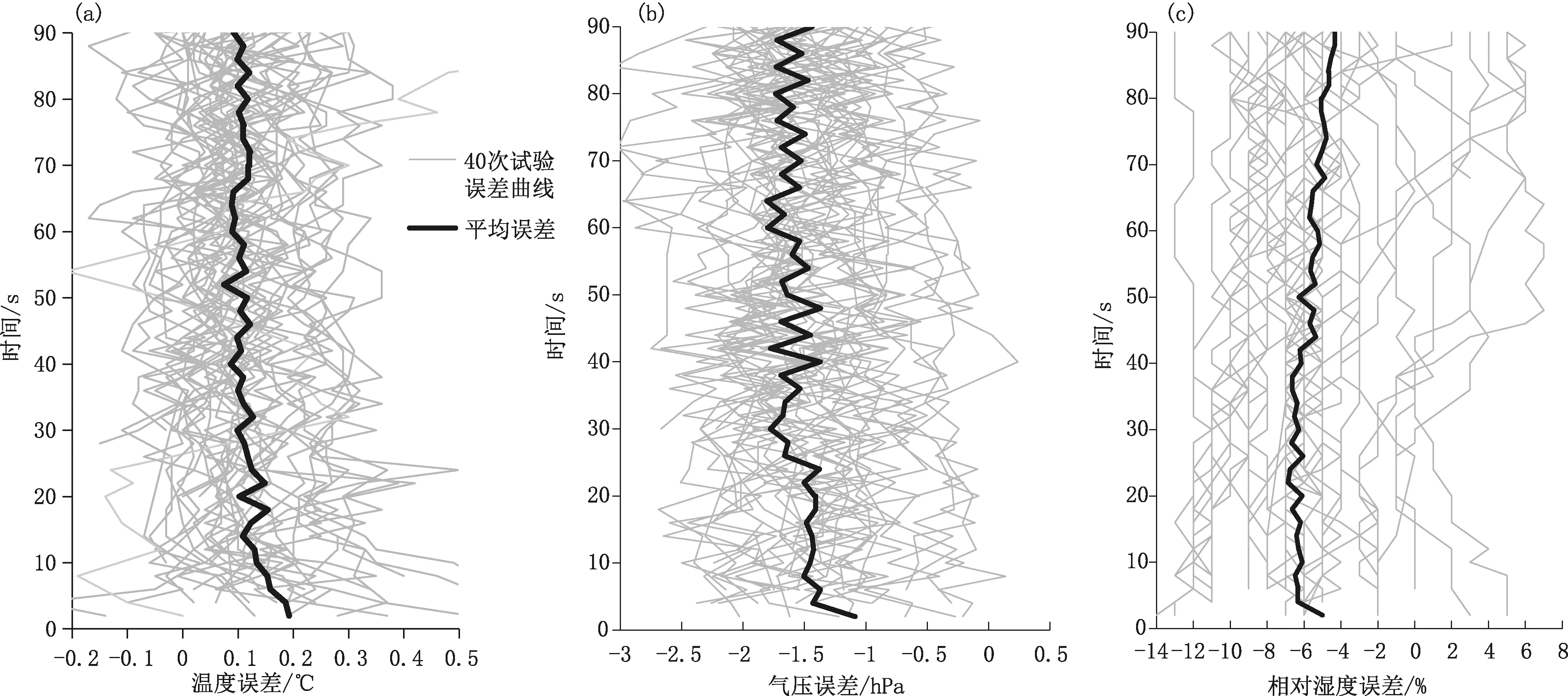
圖2 2013年12月廣東陽江GTS1型探空儀與RS92型探空儀同球施放比對試驗溫度(a)、氣壓(b)、相對濕度(c)誤差分布
可以看出,各次施放溫度誤差隨施放時間成折線變化,各次施放間有較大系統差異,但誤差隨施放時間的變化是基本相同的,2 s間的誤差變量通常在0~0.4 ℃之間;氣壓誤差隨施放時間的變化情況與溫度基本相同,2 s間的誤差變量多數在0~1 hPa之間;相對濕度在2 s間的誤差變量多數在0~2%之間。
由于本次試驗1次只施放了1個RS92型探空儀,無法得到其本身2個之間誤差的變化情況。這里取2008年7月錫林浩特國產GPS探空儀選型試驗的數據進行分析,該試驗中每次都同球施放了3個RS92型探空儀,共進行26次施放。用其中2個RS92型探空儀的施放結果,求得它們之間的相互差值,制作與圖2相同的誤差分布曲線。為便于比較,采用了與圖2相同的時間和各氣象要素誤差坐標尺度。RS92型探空儀溫度、氣壓和濕度誤差分布曲線如圖3所示。
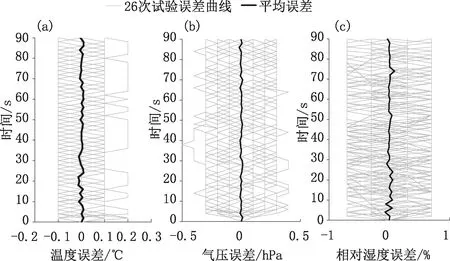
圖3 2008年7月錫林浩特RS92型探空儀同球施放26次自比對試驗溫度(a)、氣壓(b)、相對濕度(c)誤差分布
RS92型探空儀誤差分布最明顯的特征是,溫度、氣壓和濕度的誤差均存在明顯的“邊界”,即限制在一定的數據范圍內。各次施放,間隔2 s的誤差變化,溫度最大為0.1 ℃,氣壓最大為0.2 hPa,相對濕度最大為1%,通常為相應氣象要素的一個分辨力。由于RS92型的誤差散布較小,可以說明用圖2表示GTS1型探空儀的誤差數據具有較高的可信度。
由此可以得出,由L波段高空探測系統的時序設計造成的測量元件感應氣象要素至地面設備計算機軟件賦時之間的時間差,造成了測量結果的隨機波動是確定無疑的。對于探空儀,發射機發出氣象信息,讀取“更新單元”中的數據時,氣象數據可能剛更新過,也可能已經維持了1.2 s以內的一段時間。與測量元件感應氣象要素的時間相比,發射機發出的時間總是延遲的,其誤差的變化是隨機的。地面數據處理軟件與探空儀造成的時間誤差分布與探空儀相同。
3 L波段探空系統時差造成的測量結果不確定度
時間差的增加相當于改變了測量傳感器的時間常數,而作為一階測量系統的溫度、氣壓和濕度傳感器,其時間常數可以造成被測量值隨時間實際變化的幅度衰減和相位滯后,是不能忽略的。時間差造成的測量結果不確定度,可用施放時各氣象要素隨高度變化的速率和時差對應的高度計算。0.98 s的時間差所造成溫度、氣壓和濕度測量的不確定度主要取決于施放時氣球上升的速度和氣象要素的變化率。以中國氣象局2010年發布的《常規高空氣象觀測業務規范》[10](以下簡稱“《規范》”)規定的氣球標準升速計算,氣球平均升速為6.7 m/s,則在0.98 s的時間內探空儀上升的高度約為6.6 m。《規范》提供了單位高度氣壓訂正值,在原表基礎上列出時差對應高度可能引起的氣壓的標準不確定度(表1)。
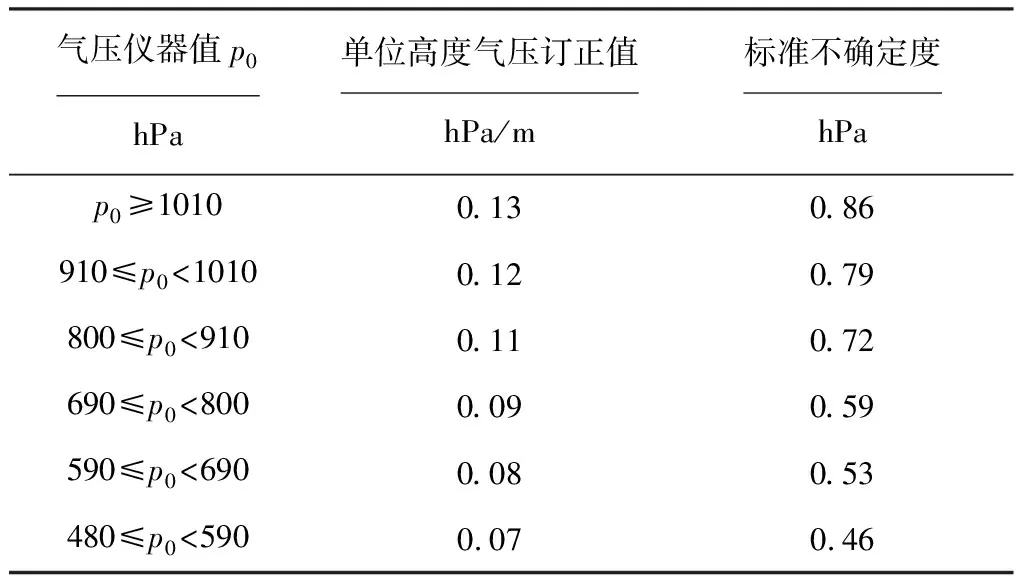
表1 時差對應高度可能引起的氣壓標準不確定度
《規范》沒有列出氣壓小于480 hPa的數據,但可以估計,時差造成氣壓的不確定度隨氣壓降低而減小。在對流層頂高度以下,大氣溫度的平均遞減率為每上升100 m降低0.65 ℃,由時差0.98 s對應6.6 m高度計算,其對應的溫度誤差約為0.04 ℃,對于探空儀的誤差來說可以忽略。濕度隨高度的變化與施放時的天氣條件有關,在探空儀出云入云時,有在1 s時間內相對濕度變化超過10%的記錄。在這種情況下,時差的主要作用是對濕度變化幅度的衰減和相位滯后,相當于濕度測量元件時間常數的增加或減小所引起的濕度誤差變化。由于情況復雜,本文不作討論。
可以得出的初步結論是,L波段探空系統總體的時差對氣壓測量影響較大,對溫度的影響較小,對濕度的影響較為復雜。目前業務中,由于探空業務應用文件對大氣的分層主要是氣壓和位勢高度,而位勢高度又主要取決于氣壓,因此,由時差造成的氣壓不確定性,將對探空應用文件的準確性造成一定影響。從時差形成的機理可知,相對于測量元件的感應時間總是延遲的,其總體散布中心為測量元件感應氣象要素后1.2 s,時差散布的擴展不確定度為0.98 s,氣壓誤差最大可達0.86 hPa。
4 探空儀及其數據處理系統的時序設計
為保證探空儀測量數據的瞬時性,使探空儀的測量結果能夠正確反映大氣要素的實際變化,避免測量元件感應氣象要素的時間與數據處理賦予時間之間產生時間差是非常必要的。即將在業務中推廣的北斗-GPS雙模式導航測風探空儀,其設計就采用了消除時差的方法,大大減小了測量結果的隨機誤差,且在2013年12月中國氣象局陽江試驗中效果良好。試驗所用的2個探空儀25次自比對結果,按照圖3對RS92型探空儀自比較誤差的處理方法,所得誤差曲線分布如圖4所示。
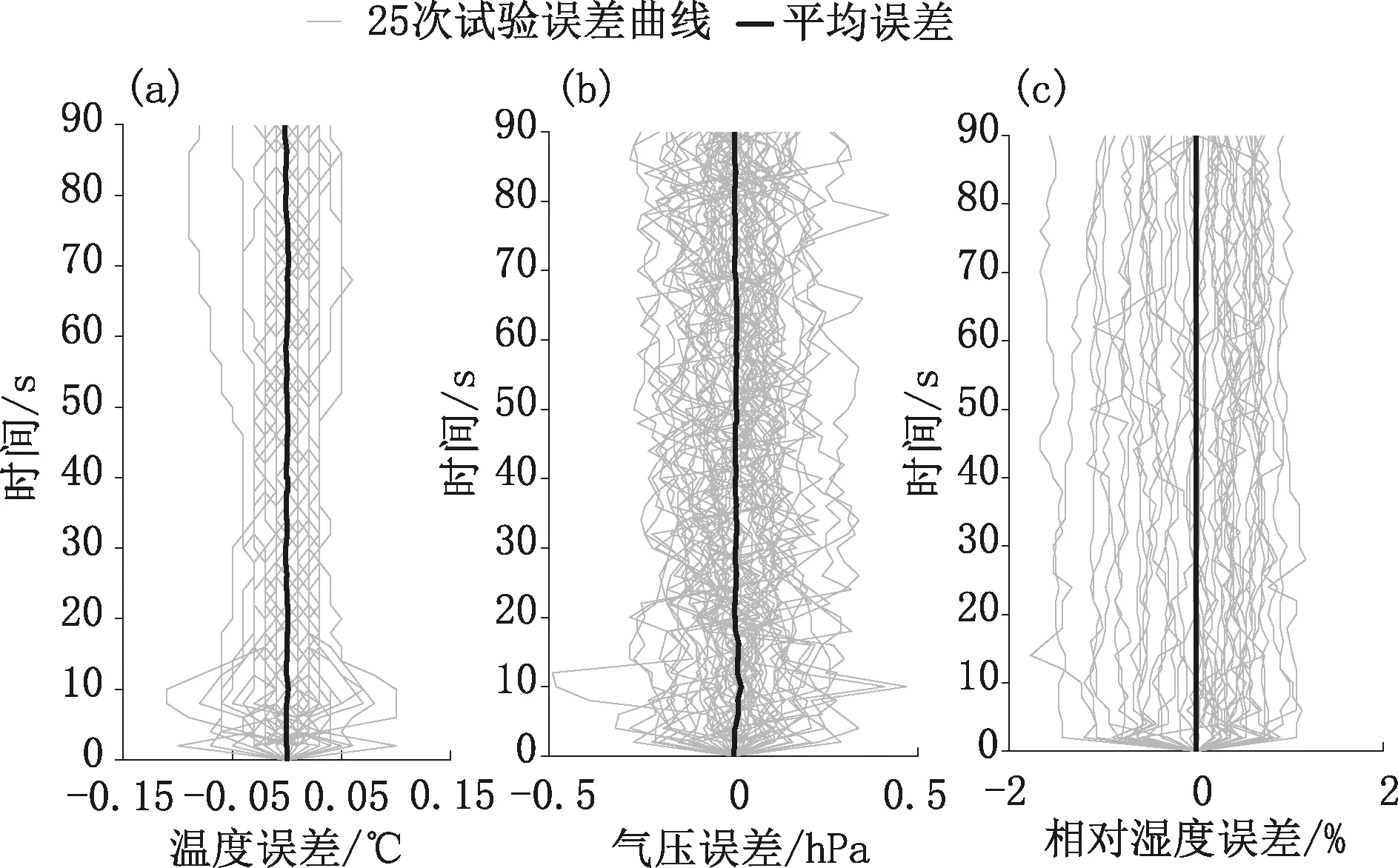
圖4 2013年12月廣東陽江北斗-GPS雙模式導航測風探空儀25次同球施放自比對試驗溫度(a)、氣壓(b)、相對濕度(c)誤差分布
可以看出,該探空儀的溫度誤差散布小于芬蘭RS92型探空儀,氣壓與RS92型相當,而濕度稍差,基本達到了芬蘭RS92型探測系統的水平。與RS92型比較,我國探空儀的誤差曲線沒有明顯的邊界,即仍然處于一個隨機變量的影響之下。
該探空儀采用的時序設計見圖5所示。其總體思路是,將所有的測量元件和標準器件通過轉換電路變為電壓信號,然后通過A/D(模數轉換器件)轉換為數字信號,并行連接在單片計算機上。目前的單片計算機通常有很多A/D轉換接口,也可以直接采用單片計算機中的A/D轉換器以簡化電路。
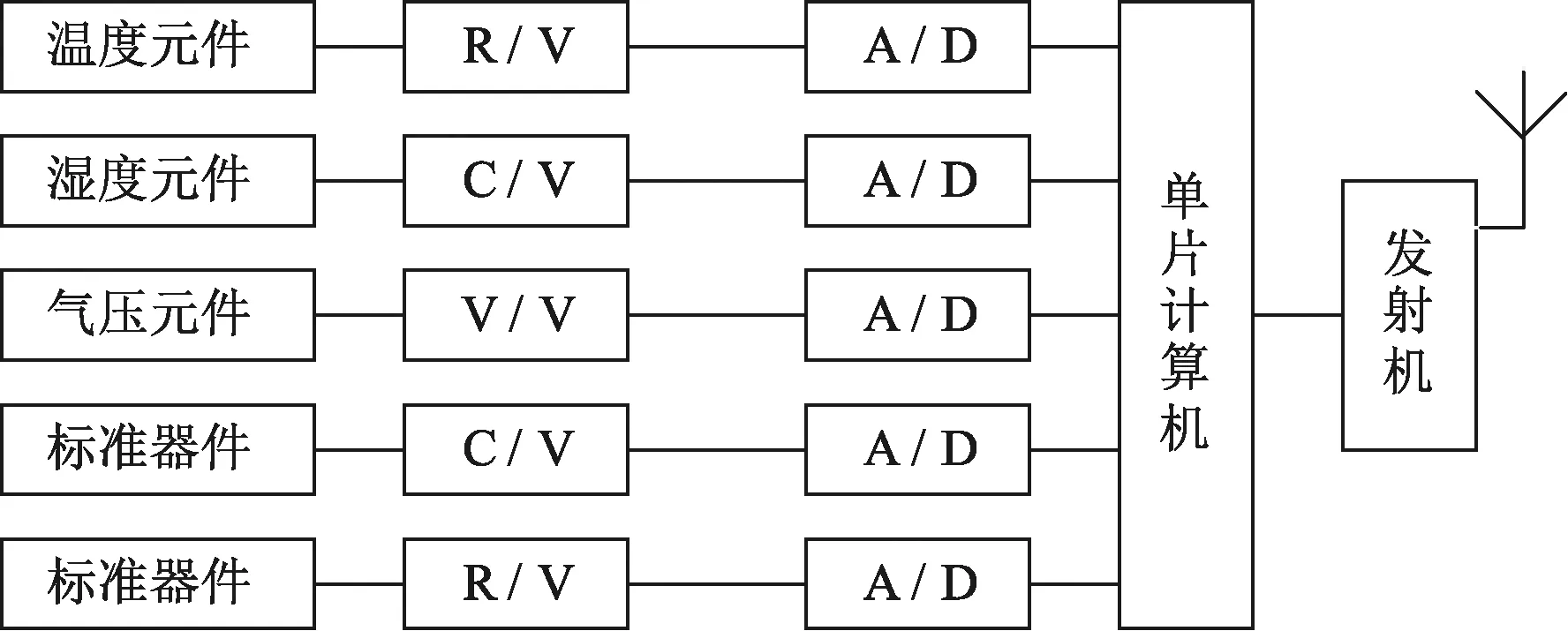
圖5 北斗-GPS雙模式導航測風探空儀時序設計
由于該探空儀測風系統由衛星導航數據接收處理膜片產生衛星定位數據和時間,并于1 s間隔產生信號使發射機發送信息,這樣在發射衛星定位信息后立即可對氣象信息進行掃描,使氣象數據緊跟在定位信息之后,形成一組包括衛星定位信息和氣象溫度、氣壓和濕度的數據組,其時間放在最前面,是由導航衛星賦予的,與地面數據處理計算機無關。該方案解決了L波段探測系統將測風和探空數據分為2個文件,致使探空和測風數據不同步的問題。同時,A/D轉換器的轉換過程在10 ms左右,而順序掃描所有A/D轉換器輸出數據的時間也在毫秒量級,這樣造成的時間差是很小的。
綜上所述,即將在業務中推廣的北斗-GPS雙模式導航測風探空儀的改進方案將顯著提升我國的探空系統水平、提高探空業務質量。
5 結論
探空儀是在運動中測量氣象信息的,其時間差不但可以使探測數據產生隨機波動,同時還相當于增加了測量傳感器的時間常數,使氣象要素的實際變化造成幅度衰減和相位滯后,而進一步產生誤差。因此,探空系統的時序設計是一個特別值得注意的問題。
通過試驗發現,L波段探空系統總體時差對氣壓測量影響較大,對溫度的影響較小,對濕度的影響較為復雜;相對于測量元件的感應時間總是延遲的,其總體散布中心為測量元件感應氣象要素后1.2 s,時差散布的擴展不確定度為0.98 s,氣壓誤差最大可達0.86 hPa。目前北斗-GPS雙模式導航測風探空儀的設計中采用了消除時差的方法,大大減小了測量結果的隨機誤差,為該問題提出了改進方法。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00