基于演化計算的迷彩目標隱蔽策略仿真設計
2021-11-01 09:08:46周穎謝振平蔣曉軍
兵工學報 2021年9期
周穎, 謝振平, 蔣曉軍
(1.江南大學 人工智能與計算機學院, 江蘇 無錫 214122; 2.江蘇省媒體設計與軟件技術重點實驗室, 江蘇 無錫 214122;3.近地面探測與感知技術國防科技重點實驗室, 江蘇 無錫 214035)
0 引言
在緊張激烈的軍事對抗過程中,發現并摧毀敵方的軍事裝備是取得戰斗勝利的關鍵環節。因此,快速設計出武器裝備、運輸車輛、偵察車輛等軍事目標的偽裝隱蔽策略,對靈活作戰、部署兵力、機動調配等方面具有十分重要的戰略意義[1]。由于迷彩色及變形具有明顯的環境適應性和隱蔽效果,學者們以軍事目標的迷彩偽裝為方向進行了大量研究,包括迷彩拼接[2]、迷彩目標識別[3-4]、偽裝圖案設計、偽裝效果評估等,均具有各自的特點優勢。
偽裝圖案設計[5-6]主要以數碼迷彩、變形迷彩、仿造迷彩等圖案類型為主,針對不同的自然環境,從軍事目標偽裝隱蔽的角度進行迷彩圖案設計。初苗等[7]提出了基于空間混色系數的數碼迷彩空間混色程度表征方法,應用于提高數碼迷彩的設計質量。畢勝等[8]將分形幾何理論與隨機中點位移算法應用到迷彩圖案設計中,實現了變形迷彩圖案的自動生成。陳善靜等[9]借鑒生物遺傳進化思想,以斑馬圖案為基礎進行偽裝圖案優選復制、交叉繁殖和變異繁殖等仿生進化處理,得到能適應成像模型的仿造迷彩圖案。針對不同類型的偽裝圖案,崔寶生等[10]從圖像統計、形狀和紋理三方面提取出目標及其背景的特征值,采用反向傳播(BP)神經網絡建立了偽裝效果量化評估模型;馬世欣等[11]研究了聯合探測與感知的高光譜偽裝效果評估方法;楊鑫等[12]運用目標跟蹤和特征統計技術,提出了動態偽裝效果評估方法。
綜上所述,目前的軍事目標偽裝隱蔽研究主要是基于傳統的圖像處理手段對軍事目標進行偽裝圖案設計和偽裝效果評估。隨著人工智能與深度學習的不斷發展,深度神經網絡在計算機視覺領域顯現出了巨大的優勢,尤其是在目標識別[13]、圖像分割[14]、圖像特征提取[15]等問題上具備運算速度快、結果準確率高等優點。
本文在已有研究基礎上提出一種迷彩目標在典型自然環境中高效隱蔽策略的仿真設計新方法,使己方軍事裝備在戰場環境中更好地保護自己,以期為軍事目標在自然場景中進行動態機動行為提供路線參考。
1 方法框架
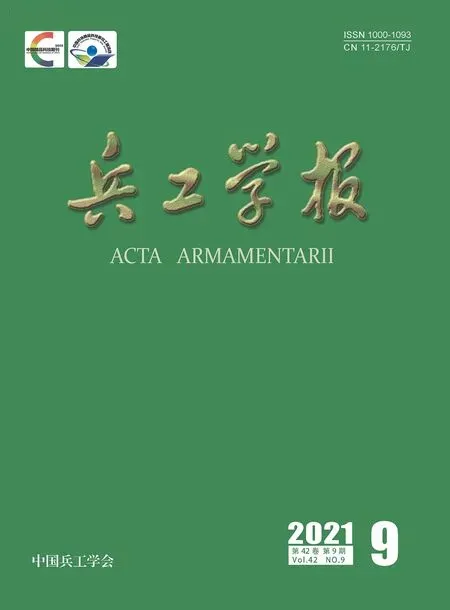
本文所提迷彩目標在典型自然環境中的隱蔽策略仿真設計方法主要框架如圖1所示,仿真設計模型的輸入參量為:迷彩目標圖像、環境場景圖像、視錯覺條帶圖像等三方面數據,模型輸出為一組給定當前環境場景中可有效實現迷彩目標隱蔽的策略參數(迷彩目標圖像的平移參數、旋轉參數,視覺錯條帶圖像的旋轉參數)及相應的隱蔽仿真圖像。圖1中,隱蔽策略參數為迷彩目標圖像的平移參數(圖像寬度和高度的像素值)、迷彩目標圖像的旋轉參數(旋轉角度°),以及視覺錯條帶圖像的旋轉參數(旋轉角度°)。
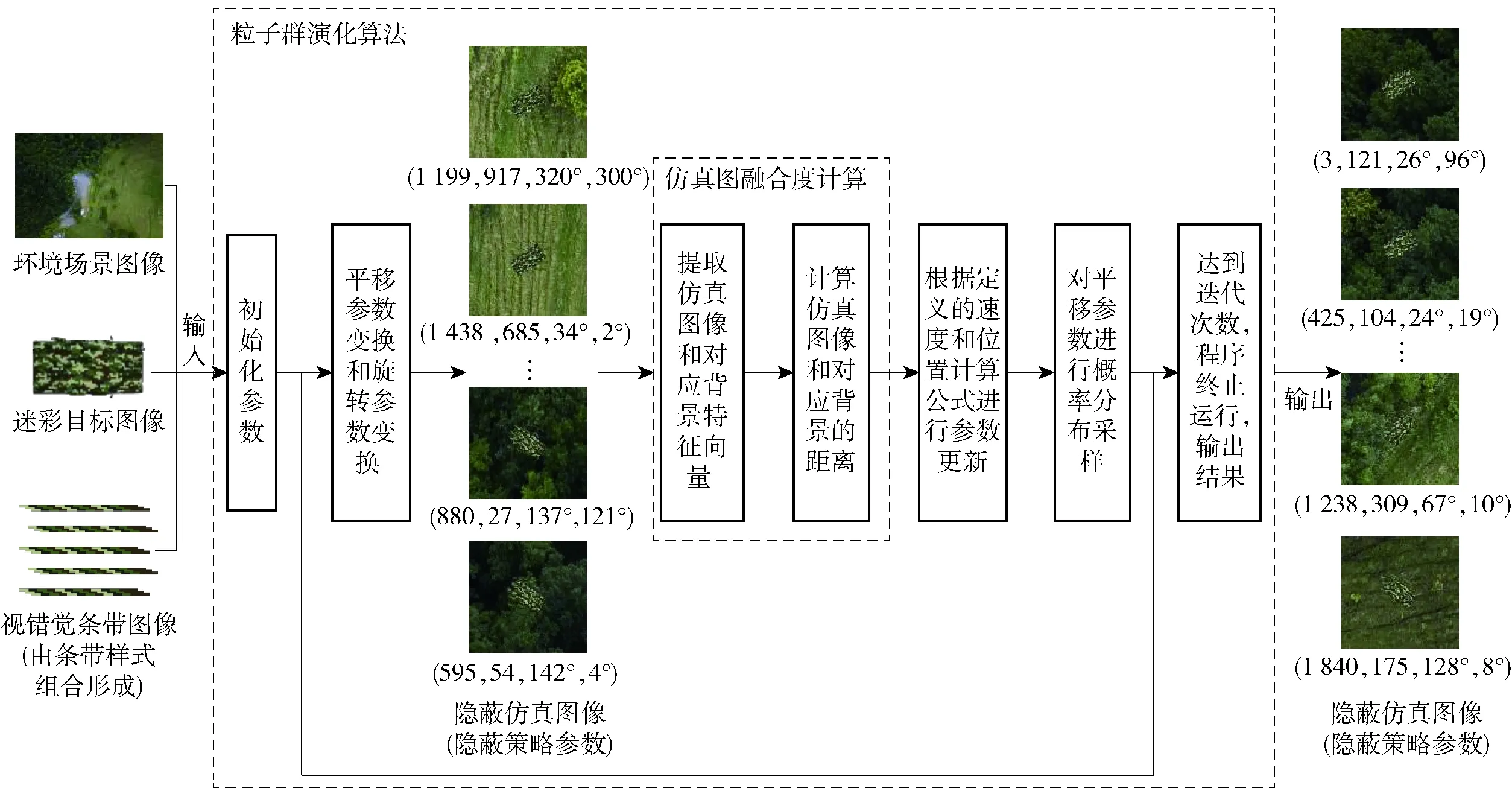
圖1 本文方法的技術框架Fig.1 Technical framework of the proposed method
如圖1所示,本文方法技術框架的主要過程為結合概率分布采樣的粒子群優化算法。引入這一新算法思想的主要思路如下:傳統單目標粒子群優化算法的輸出是一個最優全局解,而本文模型的目標是盡可能多地找到一組位于不同位置但又都有較高隱蔽度的隱蔽策略。通過在傳統粒子群優化算法計算過程中嵌入對位置參數的概率分布采樣處理,可以有效地實現上述要求。
隱蔽仿真圖像依據隱蔽策略參數動態計算生成。為了研究不同典型場景下的隱蔽仿真圖像結果,本文選擇林地和荒漠兩種典型自然場景,并針對其中的大量可能情況作對比實驗,發現迷彩目標在靠近樹木和道路附近時隱蔽效果相對較好。相應地,表1給出了4種能夠實現較好隱蔽效果的場景結果,分別是林地型林地場景1的數碼迷彩目標隱蔽仿真結果、林地場景2的變形迷彩目標隱蔽仿真結果,荒漠型荒漠場景1的數碼迷彩目標隱蔽仿真結果、荒漠場景2的變形迷彩目標隱蔽仿真結果。
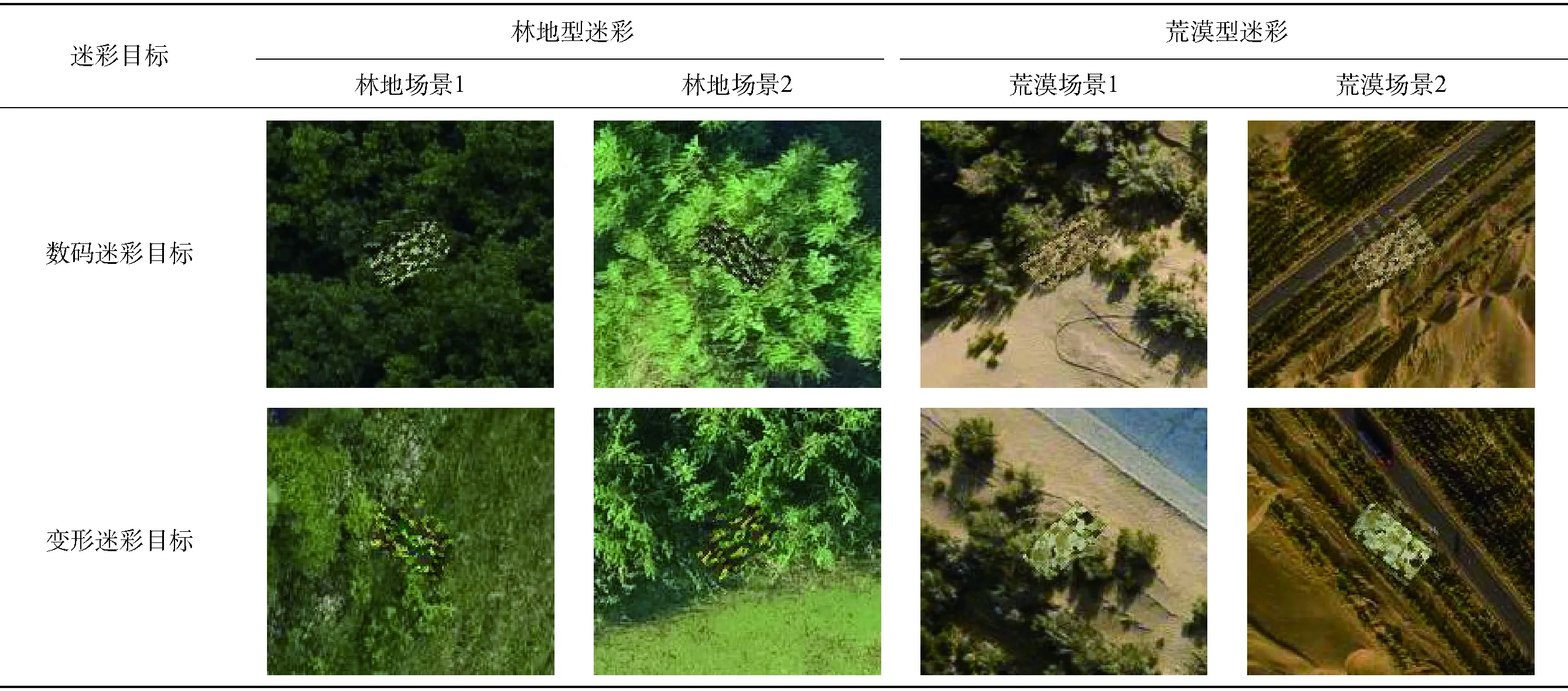
表1 不同類別場景下迷彩目標隱蔽仿真結果示例
根據試驗不同的圖像距離度量方法后發現,余弦相似度得到的圖像融合程度值與人眼判別結果最為接近。故迷彩目標的隱蔽程度根據隱蔽仿真圖與相應純背景圖的深度神經網絡特征相似度(余弦相似度)來度量,它也用作粒子群優化算法的適應度。仿真計算的終止條件為仿真計算(粒子群優化計算)結果不再有明顯變化。
2 關鍵算法模塊
2.1 粒子群優化算法
針對地理空間廣闊和不同地形地貌的環境場景特點,為快速仿真計算出迷彩目標的理想隱蔽策略,考慮引入基于鳥群覓食行為的粒子群優化算法[16-18],該算法能夠快速收斂得到最優解。根據此思想,引入粒子群優化算法對迷彩目標隱蔽策略進行搜索計算。算法的主要過程如下:
步驟1以場景圖像大小為搜索空間的范圍,將每個迷彩目標看作搜索空間中一個沒有體積質量的目標粒子,在這個范圍中隨機初始化一群目標粒子,它們在搜索空間中以一定的速度跳躍,該速度決定目標粒子跳躍的方向和距離。
步驟2將平移參數和旋轉參數作為目標粒子的位置參數,計算目標粒子與場景圖像生成的隱蔽仿真圖像融合度,并將融合度作為每個目標粒子迭代優化的適應度。在每一次迭代中,比較當前輪次中所有仿真圖像的融合度大小,獲取當前的全局最優隱蔽策略。
步驟3根據定義的速度計算公式(1)式、位置計算公式(2)式對仿真圖像的隱蔽策略參數進行更新,設置迭代次數為終止條件,滿足迭代次數時程序終止運行,輸出相應的隱蔽仿真圖像及隱蔽策略參數。
(1)
(2)

2.2 條帶樣式設計與覆蓋策略
考慮到視錯覺圖像的條帶樣式對人眼具有較強的迷惑性,進一步引入具有視錯覺特色的條帶樣式設計與覆蓋策略。視錯覺是由于人的視覺和知覺神經同時受被觀察物體的影響,人受到生理、心理等因素綜合刺激后形成的視覺感知偏差。圖3(a)~圖3(f)為條帶樣式設計與組合的過程示例。圖3(c)展示的視錯覺圖像為曲線錯覺類型,此類圖像的紋理圖案中線條看起來似乎是彎曲的,但其實是筆直而相互平行的。結合視錯覺圖像的特點,同時參考形成視錯覺效果的紋理線條,運用圖案紋理提取、迷彩主色提取、混合主色與紋理以及條帶組合等技術,進行視錯覺條帶樣式的設計與組合。

圖3 條帶樣式設計與組合的過程示例Fig.3 Process of strip style and combination design
具體地,抽取視錯覺圖像的紋理線條,同時采用k-means主色聚類的計算公式(3)式,提取迷彩目標的主體顏色,并使用(4)式按照紋理線條的樣式,將顏色和紋理進行亮度均衡混合設計,使得視錯覺圖像的紋理線條與迷彩目標在顏色空間上達到一致。然后將設計的條帶樣式運用(5)式,按照一定的數量和規律進行排列組合。
(3)
Io=(1-α)Ic+αIt,
(4)
Ns=「HIt/HIo?,
(5)
式中:Emin為最小化圖像像素聚類平方和;c為聚類得到的顏色類別;d為圖像像素;Xγ為第γ個圖像像素;Mμ為第μ個圖像的像素均值;Io為混合主色與紋理后的輸出圖像;α為混合系數,α∈(0,1);Ic為迷彩主色提取圖像;It為紋理線條提取圖像;Ns為組合的條帶數;HIt為迷彩目標的高度像素值;HIo為混合主色與紋理后的輸出圖像高度像素值。
依據條帶樣式設計與組合的過程(見圖3),將不同樣式的條帶按照錯位、交叉、疊加等方式進行組合排列,形成視錯覺條帶圖。然后將視錯覺條帶圖作為輸入參量,視錯覺條帶圖的旋轉參數作為隱蔽策略參數,并基于粒子群優化算法(見圖2),以迷彩目標的隱蔽融合度作為尋優目標進行迭代更新,獲得隱蔽融合度更高的隱蔽仿真圖像。表2為引入條帶覆蓋策略后獲得的隱蔽仿真結果,展示了數碼迷彩目標在林地型場景和荒漠型場景下的各3種隱蔽效果。同時在表2中每張隱蔽仿真圖像右面標注迷彩目標的隱蔽融合度值,數值越接近1,表示隱蔽效果越好。
2.3 仿真圖融合度計算
根據粒子群優化算法的流程圖(見圖2)可知,計算迷彩目標粒子的適應度是其中的關鍵步驟。考慮將迷彩目標圖像、環境場景圖像和視錯覺條帶圖像的融合度作為每個目標粒子的適應度,具體計算方式如下:根據(1)式和(2)式更新的位置參數獲得迷彩目標圖像的平移參數值、旋轉參數值和視錯覺條帶圖像的旋轉參數值作為隱蔽策略參數值,生成隱蔽仿真圖像;采用VGG-16深度神經網絡模型,對獲得的隱蔽仿真圖像區域及相應純背景圖像區域進行特征提取,然后運用(6)式計算仿真圖像區域及相應純背景圖像區域的深度神經網絡特征相似度(余弦相似度),用上述余弦相似度作為迷彩目標的隱蔽融合度。

表2 條帶覆蓋策略的隱蔽仿真結果
(6)
式中:Ff為隱蔽圖像區域及相應純背景圖像區域的融合度;Qp(imgc,imgs,mw,mh,rc,rs)為隱蔽仿真圖像區域的特征向量,p(imgc,imgs,mw,mh,rc,rs)為隱蔽仿真圖像的合成方法,imgc為迷彩目標圖像,imgs為視錯覺條帶圖像,mw、mh迷彩目標圖像的平移參數,mw∈[0,w],mh∈[0,h],w、h分別為環境場景圖像的寬和高,rc為迷彩目標圖像的旋轉參數,rc∈[0°,360°],rs為視錯覺條帶圖像的旋轉參數,rs∈[0°,360°];Qb為對應的純背景圖像區域的特征向量。
2.4 概率分布采樣
由于粒子群優化算法具有收斂性,經過多次演化計算后迷彩目標隱蔽策略參數將會趨向于單一值。為了獲得同一目標在相同場景背景中更多樣的有效隱蔽策略,引入基于概率分布的采樣技術對迷彩目標的平移參數進行再采樣,以獲得更多不同區域中的迷彩目標隱蔽策略。具體地,采用Metropolis-hasting采樣算法[19-22]對目標粒子位置參數中的平移參數進行采樣,相應的算法過程如下:
輸入:先驗概率分布q(x(*)|x(t)),目標概率分布p(x(i)|Xi),其中Xi={x1,…,xN},N為目標粒子數量。
initx(0)←random.uniform(xmin,xmax)
fort←0 toZ-1 do
sampleu←random.uniform(0,1)
samplex(*)←q(x(*)|x(t))
calculationλ←
ifu≤λ
x(t+1)←x(*)
else
x(t+1)←x(t)
end if
end for.
輸出:樣本序列(x1,x2,…,xN).
其中:x(0)為在[xmin,xmax]區間的一個初始隨機實數,xmin、xmax分別為場景背景的范圍最小值和最大值;Z為迭代次數;q(x(*)|x(t))為已知的正態分布,從中生成平移參數的候選狀態,x(*)為候選數值,x(t)為均值為0、方差為1的正態分布;λ為接受概率;u為在[0,1]區間內的一個隨機實數。按照以上過程進行分布采樣,在算法停止迭代后采樣出一個樣本序列(x1,x2,…,xN),可以近似地認為是從目標分布中采樣得到的。因此,利用概率分布采樣獲得的樣本可以滿足迷彩目標隱蔽策略的分散性要求,得到同一目標在同一場景中不同區域的隱蔽策略參數。表3展示了同一林地型數碼迷彩目標在同一林地場景中9處不同區域的隱蔽仿真圖像。
3 實驗及結果分析
3.1 實驗設計
3.1.1 迷彩目標分割模型訓練
通過無人機采集和網絡搜索到叢林、林地、草地、荒漠、沙漠等不同背景類型的航拍環境場景圖像,從中選取10張作為環境場景圖像,像素大小為2 000×1 500. 同時對迷彩玩具車模型進行俯視角度拍照,得到8個具有代表性的迷彩目標圖像,包括林地型和荒漠型迷彩,像素大小為50×20. 對迷彩目標圖像進行空間位置變換、姿態角度變換以及光照明暗度均衡,再與場景圖像進行仿真融合,得到初始的仿真訓練樣本。同時為了提升訓練模型性能,對初始的仿真訓練樣本采用基于圖聚類的采樣算法[4],選出具有代表性的樣本圖像,最終得到24 000張有效的仿真訓練樣本圖像,并對其進行迷彩目標區域語義標注。然后運用深度神經網絡DeepLab-Resnet網絡作為訓練模型[14],進行20 000次迭代訓練,得到用于測試的迷彩目標分割模型。
3.1.2 測試數據集構建
實驗中,選取4張不用于訓練的林地型和荒漠型航拍場景圖像作為測試環境場景圖像。測試迷彩目標圖像來源于3dmax建模得到的越野車模型,經過4種典型的迷彩圖案貼圖,得到與實際車輛尺寸相符的迷彩越野車俯視圖。表4所示為測試環境場景圖像。表5所示為測試迷彩目標圖像。由于視覺錯條帶圖像對人眼具有極大的迷惑性,也便于放置在車輛頂部,經過條帶樣式設計與組合(見圖3),同時運用(5)式計算獲得條帶數量為5條,分別生成5種視錯覺條帶圖像。表6所示為相應的視錯覺條帶圖像。
表3 同一林地型數碼迷彩目標在同一林地場景中的1組隱蔽仿真結果
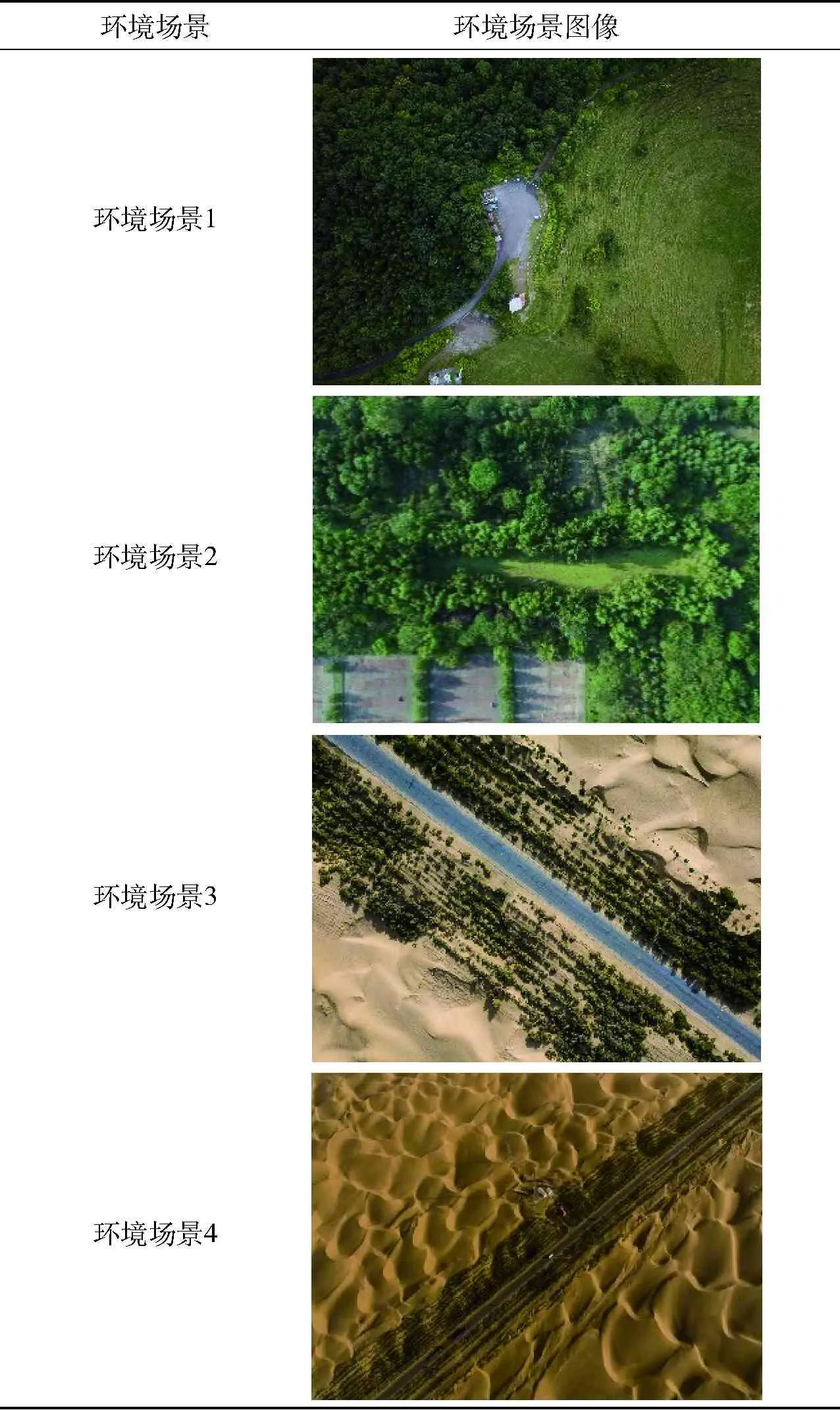
表4 測試環境場景圖像

表5 測試迷彩目標圖像
3.1.3 評價指標
結合迷彩目標分割模型,考慮到迷彩目標的隱蔽融合度和分割識出結果本身是一組對抗關系[23],當融合度越高時分割識出結果就越差。為了定量評估迷彩目標隱蔽策略仿真設計方法的有效性,從融合度和分割識出結果兩方面來判斷隱蔽仿真圖像樣本集的隱蔽效果。一方面,依據融合度的計算公式(6)式,可以得到一組多區域隱蔽仿真圖像的融合度值,然后取這組多區域仿真圖的平均融合度MFf為評價標準,以評價算法的整體強壯性。另一方面,運用訓練好的迷彩目標分割模型對這組仿真圖進行測試,得到分割識出率和分割圖像結果。就是把仿真圖中的每個像素點作為計量單位,統計迷彩目標像素點的識別數量,運用(7)式計算目標像素點的分割識出率Pt,獲得迷彩目標居中于隱蔽仿真圖像的平均分割識出率MMPt和迷彩目標非居中于隱蔽仿真圖像的平均分割識出率MPt. 分割識出率的計算公式為
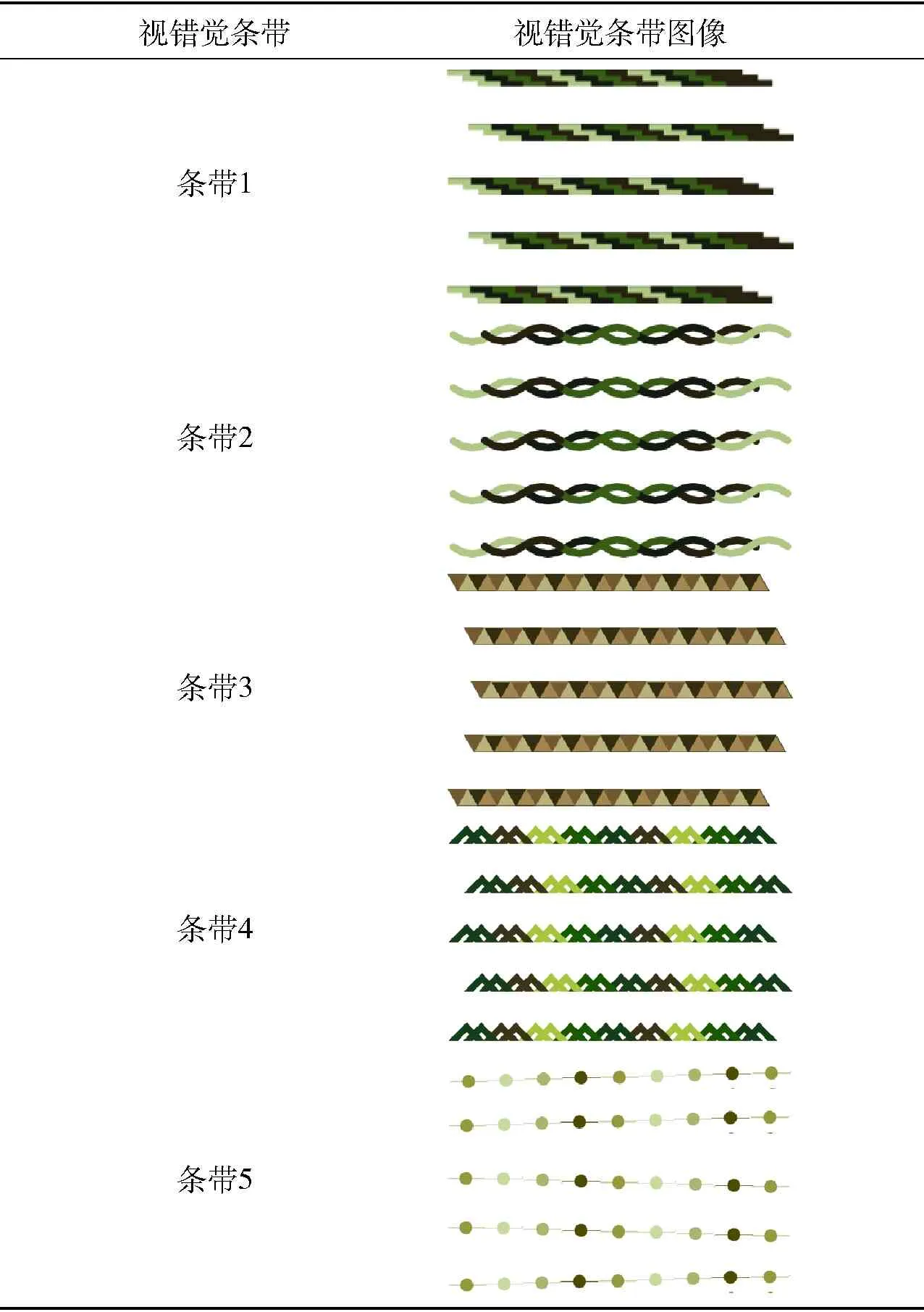
表6 設計的視錯覺條帶圖像
(7)
式中:T為迷彩目標中像素被正確識別的像素數;B為背景像素中被識別為目標的像素數。
3.2 實驗結果與分析
考慮精細化評估本文所提迷彩目標與場景圖像的融合仿真計算,以及視錯覺條帶覆蓋的迷彩目標隱蔽計算對隱蔽效果的影響,使用名稱為林地1和荒漠1的迷彩目標圖像,對林地1和荒漠1分別進行3種情況的實驗。第1種情況是僅對迷彩目標圖像進行平移參數變換,第2種情況是對迷彩目標圖像進行平移參數變換和旋轉參數變換,第3種情況是基于第2種情況,同時輸入對應的視錯覺條帶圖像并對條帶圖像進行旋轉參數變換。結合前期多次實驗得到的數值結果相差在0.2以內,考慮設置在每種情況下均進行10次實驗,并取10次實驗得到的全局最優隱蔽仿真圖像的融合度均值MFg和一組多區域隱蔽仿真圖像的融合度均值MFp. 根據實驗結果的收斂情況,設置每次實驗的迷彩目標數量設為200個,訓練輪次為100輪。實驗中設置的具體參數如表7所示;根據隱蔽融合度的計算公式(6)式,得到實驗結果如表8所示。

表7 粒子群優化算法參數設置

表8 不同策略下本文方法的性能結果
分析表8可以看出:在林地和荒漠兩種典型的自然環境場景中,第1種情況下獲得的全局最優隱蔽仿真圖像的MFg可以達到0.98以上,并且一組多區域隱蔽仿真圖像的MFp也可以達到約0.97;第2種情況下,加入迷彩目標圖像的旋轉參數變換后,相較前者MFg和MFp均提高約0.02,表明本文所提嵌入概率分布采樣的粒子群優化算法具有顯著的優勢;第3種情況下,再加入不同樣式條帶的視錯覺條帶圖像的旋轉參數變換,根據實驗結果可知融合度有了進一步提高,表明本文所提條帶樣式設計與覆蓋策略具有合理性和實用價值。
為了進一步檢驗所提方法的有效性,使用4種典型的迷彩圖案林地1、荒漠1、林地2、荒漠2,運用上述仿真設計框架(見圖1)得到一組隱蔽仿真圖像,再利用迷彩目標分割模型對隱蔽仿真圖像進行檢驗,得出平均分割識出率。同時引入5種視錯覺條帶圖像(林地1_條帶1、林地1_條帶2、荒漠1_條帶3、林地2_條帶4、荒漠2_條帶5)與之進行對比分析。實驗中,為了保證結果的可靠性,分別對每種情況進行10次實驗,取MFf、MMPt、MPt作為數值性能指標。表9給出了相應的實驗結果。
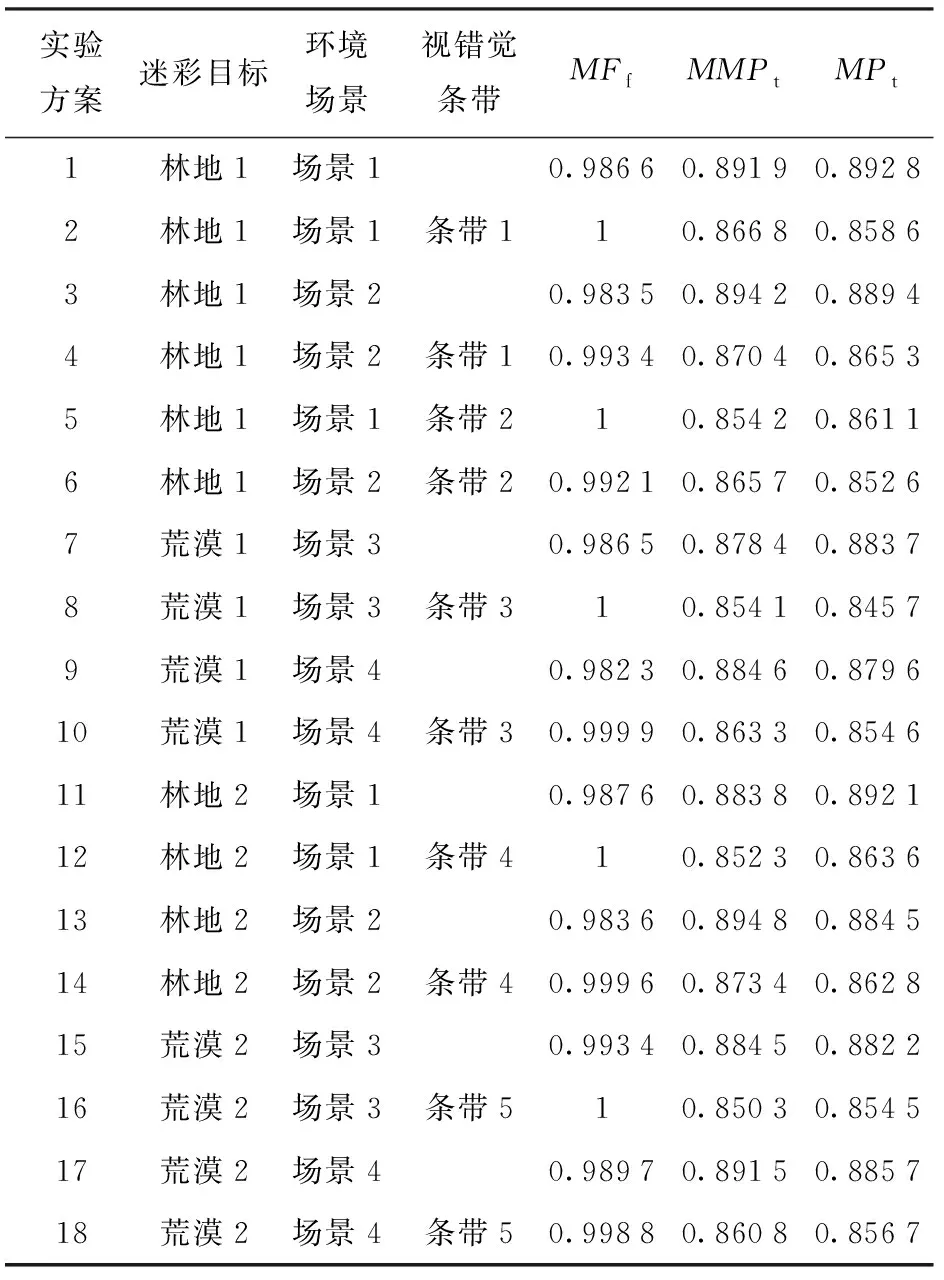
表9 迷彩目標隱蔽策略仿真設計性能結果
由表9可以清楚地看出:運用迷彩目標分割模型進行不同方案的多次實驗后,迷彩目標圖像和環境場景圖像的融合仿真計算得到的隱蔽仿真圖像的MMPt和MPt均低于0.9;引入不同樣式視覺條帶圖像后得到的隱蔽仿真圖像的MMPt和MPt又降低了約0.02,表明本文方法獲得的隱蔽仿真圖像具有較強的迷惑性和隱蔽性。
為了進一步直觀地展示本文方法的性能,對隱蔽仿真圖像的測試結果進行可視化呈現,給出表10和表11所示隱蔽仿真圖像的DeepLab-Resnet網絡分割實驗結果。運用3.1.1節訓練得到的迷彩目標分割模型進行測試,將增加了條帶覆蓋策略的隱蔽仿真圖像輸入模型中,獲得相應的分割圖像。其中,表10和表11的第1行均是迷彩目標位于圖像中間位置,第2行均是迷彩目標不在圖像中間位置。分割結果中純黑部分為背景,有色部分為迷彩目標分割模型發現的迷彩目標區域。
表10和表11的測試結果表明,基于迷彩目標圖像和環境場景圖像的融合仿真計算,同時引入視錯覺條帶覆蓋策略的方法框架,迷彩目標分割模型不能完整分割出迷彩目標區域,甚至無法發現迷彩目標區域。而且結合人眼判讀,也可以發現獲得的不同區域隱蔽仿真圖像具有明顯的隱蔽性。
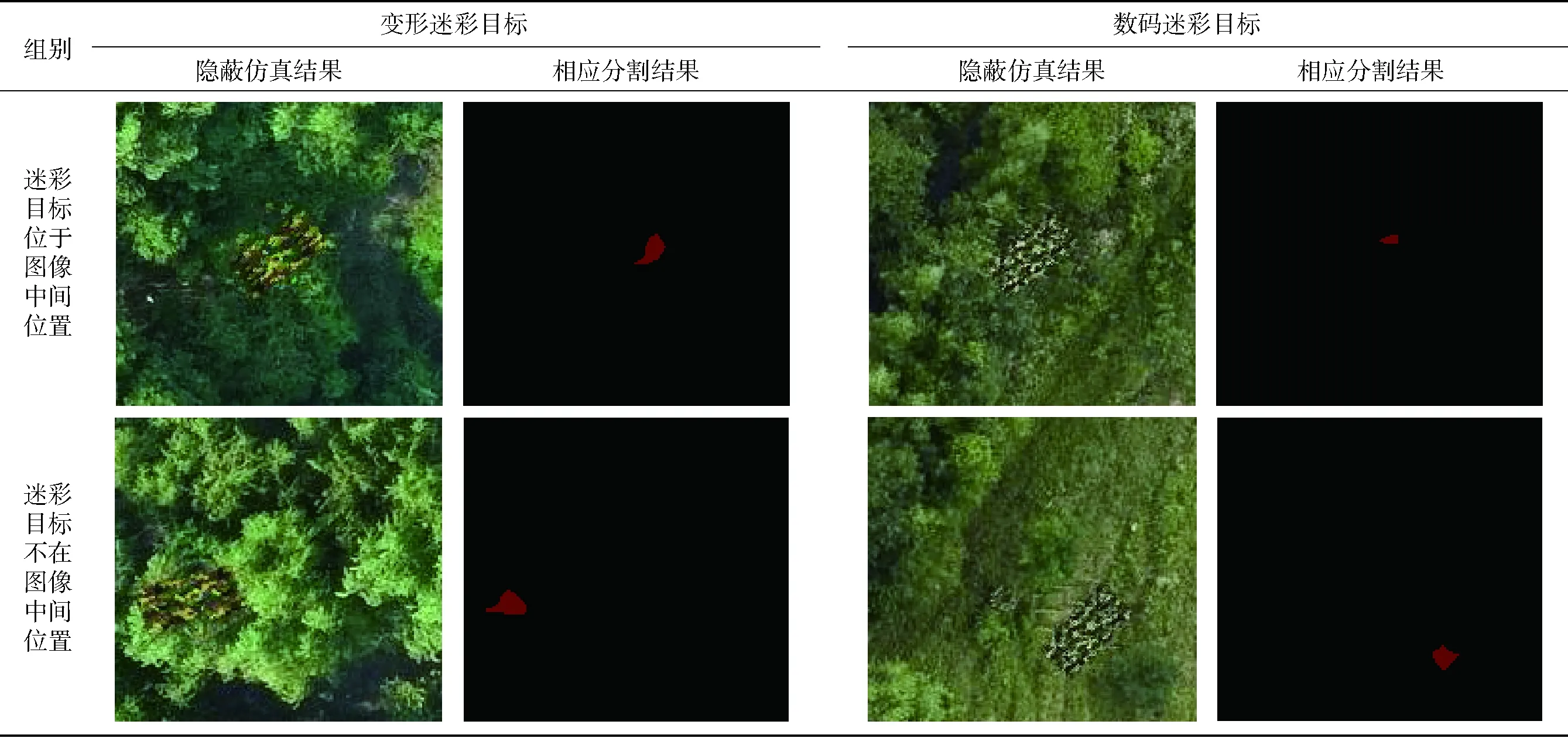
表10 隱蔽仿真圖像(荒漠型場景)的DeepLab-Resnet網絡分割實驗結果

表11 隱蔽仿真圖像(林地型場景)的DeepLab-Resnet網絡分割實驗結果
4 結論
本文提出一種基于優化計算的迷彩目標隱蔽策略仿真設計方法,該方法主要設計了迷彩目標圖像、環境場景圖像和視錯覺條帶圖像的融合仿真計算策略、條帶樣式設計與覆蓋策略,以及嵌入概率分布采樣的粒子群優化算法的搜索計算過程。所得主要結論如下:
1)本文方法可以準確給出迷彩目標的隱蔽策略參數,為快速地隱蔽迷彩目標提供位置信息,并能依據隱蔽策略參數生成高質量的多樣性隱蔽策略結果,表明了新方法思路的現實可行性,即在當前技術條件下迷彩目標隱蔽策略的自動化設計是完全可行的。
2)本文所提視錯覺條帶樣式設計與覆蓋策略可以得到隱蔽性和迷惑性更強的隱蔽策略結果,而且也通過了深度神經網絡分割模型的驗證,表明了新方法的有效性,也為典型自然環境下的迷彩圖案設計提供了一種新的思路。
如何更真實地仿真設計軍事目標在戰場環境中的動態隱蔽策略,以達到軍事目標在機動過程中最好的隱蔽能力,還需要更加深入的研究。
猜你喜歡
教學考試(高考化學)(2021年2期)2021-05-30 06:15:52
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中學生數理化·高一版(2020年3期)2020-04-21 08:03:20
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
藝術啟蒙(2018年7期)2018-08-23 09:14:18
數學大世界(2018年1期)2018-04-12 05:39:14
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16