一種適用于北斗短報文通信的天線波束指向算法
2021-10-31 06:20:02何宏倫
電子與信息學報 2021年10期
關鍵詞:信號
張 薇 何宏倫 王 瑋
(航天恒星科技有限公司 北京 100086)
1 引言
北斗短報文通信是我國自主研發的北斗衛星導航系統的獨有功能,具有覆蓋范圍廣、通信距離遠、通信無盲區、安全可靠的優點[1]。目前,北斗衛星短報文通信廣泛地應用在電力[2,3]、漁業[4–6]、應急救援[7,8]、軍事[9,10]等多個領域。隨著現在戰爭科技化水平的不斷提高,高速武器系統裝載衛星數據鏈的需求越來越迫切[11–14],北斗短報文通信作為一種有效的衛星中繼數據鏈路,也廣泛地應用在高速武器系統等高動態載體中。
高動態載體具有飛行速度快、姿態變化大、飛行區域廣甚至跨短報文波束的特點,而北斗二代短報文通信是采用5顆GEO衛星的10個短報文波束進行區域覆蓋和通信。載體在大姿態角時的短報文通信對載體天線的覆蓋角域性能帶來了巨大挑戰。為了適應高動態載體的這些特點,提高短報文通信性能,需要采用載體天線波束指向算法,而如何從10個短報文波束中選取最優波束進行短報文通信和天線波束指向則是一個技術難點。文獻[15]提出了一種導彈滾動角控制和天線波束賦形相聯合的方式來保證載體天線波束指向北斗GEO衛星,從而提高北斗短報文通信性能,但優選短報文波束的確定只是考慮了載體位置,并未結合天線增益。
本文提出了一種適用于北斗短報文通信的天線波束指向方法。根據載體所處的位置和姿態,綜合考慮北斗GEO衛星10個下行短報文波束的信號能量和載體天線波束指向北斗GEO衛星時的天線增益,實時選取最優的短報文波束,并將天線波束實時指向該最優短報文波束對應的GEO衛星,從而極大地提高了短報文通信性能。
2 模型建立
天線波束指向算法共包含如下幾個過程:創建查找表、天線波束指向角計算、波束總能量計算、防波束頻繁切換設計及最優短報文波束選取、天線波束指向角確定。圖1給出了天線波束指向算法的原理框圖。
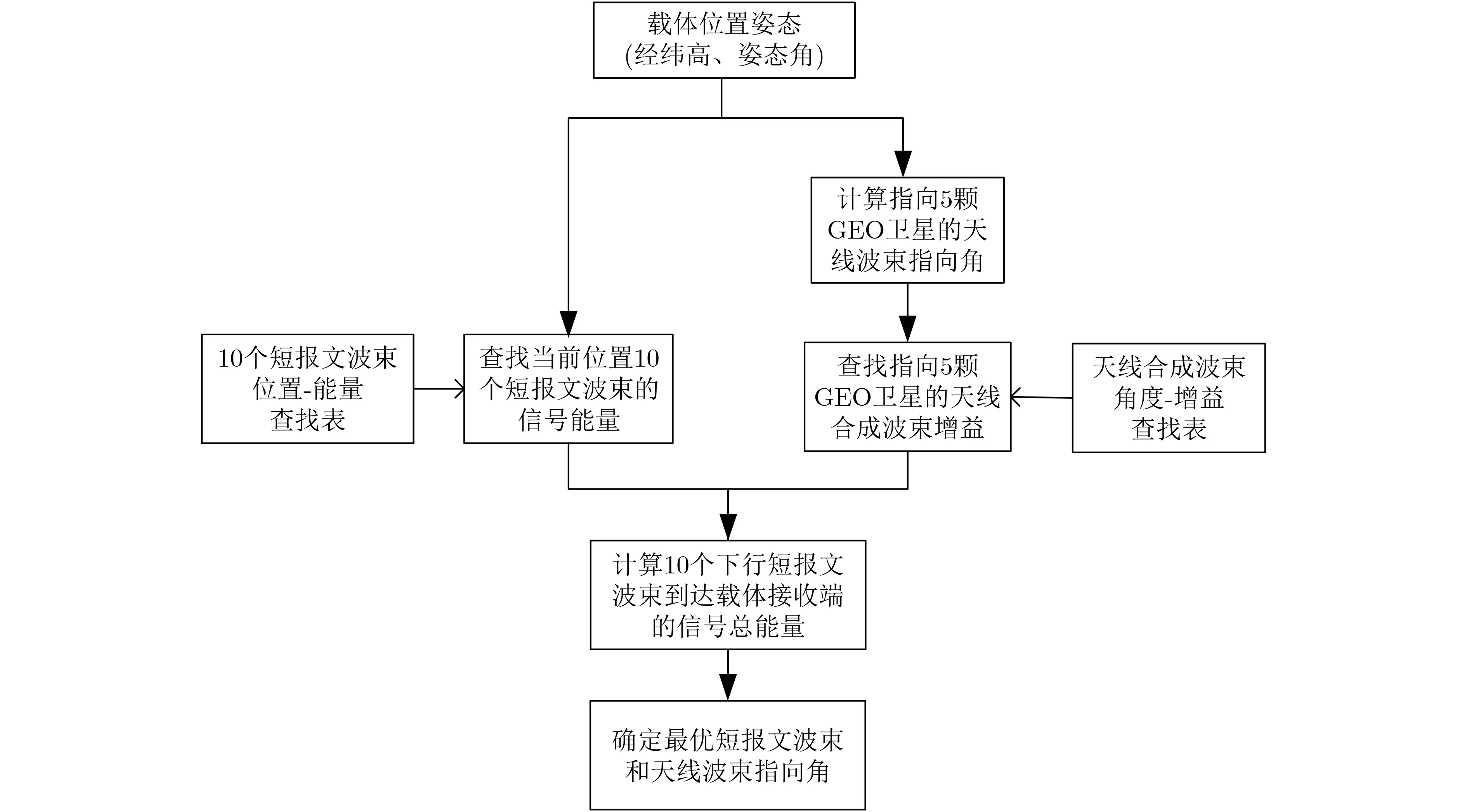
圖1 天線波束指向算法原理框圖
2.1 創建查找表
首先需要創建10個北斗衛星短報文波束能量查找表和1個天線合成波束增益查找表。
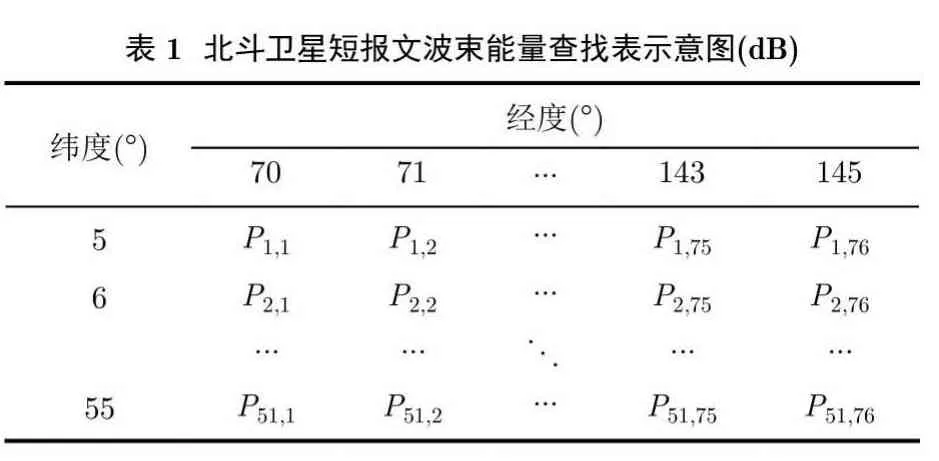
(1)北斗衛星短報文波束能量查找表(表1)
每個北斗衛星短報文波束能量查找表對應一個北斗二代GEO衛星下行短報文波束。該查找表是一個2維表格,查找表的行對應緯度,列對應經度,表格里面為對應位置(經緯度)的北斗衛星下行短報文波束信號能量。由于北斗二代GEO衛星短報文波束的地理位置覆蓋區域為:北緯5°~北緯55°、東經70°~東經145°,間隔1°進行波束能量存儲,因此每個波束能量查找表為51行×76列。短報文波束信號能量是一個包含小數的數值,為了減小波束能量查找表的存儲數據量,同時保證衛星信號的數值精度,對查找表中的數值進行×10、取整和歸一化的處理。
已知載體的位置(經度和緯度),即可以從北斗衛星短報文波束能量查找表中查找到對應位置的短報文波束信號能量。
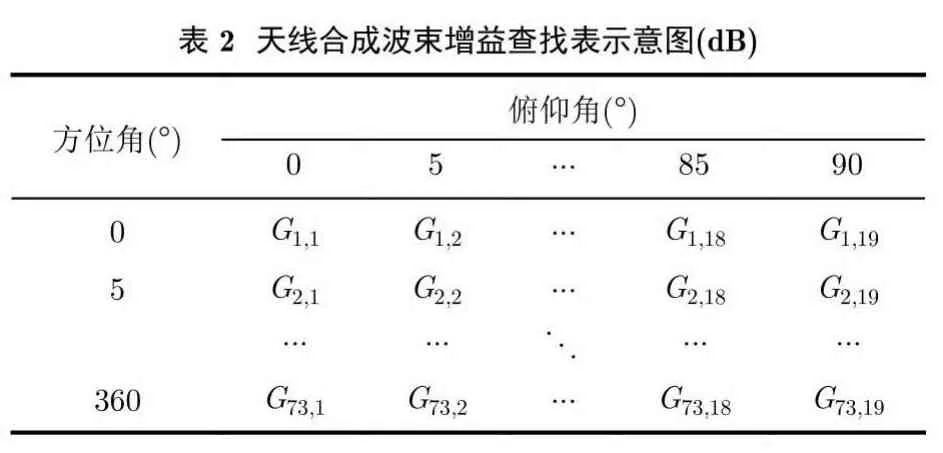
(2)天線合成波束增益查找表(表2)
天線合成波束增益查找表用于根據計算的天線波束指向角查找對應的天線合成波束增益。該查找表是一個2維表格,查找表的行對應方位角,列對應俯仰角,表格里面為對應天線指向角(方位角、俯仰角)的天線合成波束增益G。查找表覆蓋角度為:方位角0~360°、俯仰角0~90°,每間隔5°進行天線增益的存儲,因此該查找表為73行×19列。同樣,由于天線增益(dB)是一個包含小數的數值,為了減小天線合成波束增益查找表的存儲數據量,同時保證天線增益的數值精度,對查找表中的數值進行×10、取整和歸一化的處理。
2.2 天線波束指向角計算
根據載體的位置(經度、緯度、高度)和姿態(俯仰角、偏航角、橫滾角),分別計算指向10個短報文波束的天線波束指向角(A1~A10)。由于北斗衛星GEO1對應短報文波束1、波束2,GEO2對應短報文波束3、波束4,GEO3對應短報文波束5、波束6,GEO4對應短報文波束7、波束8,GEO5對應短報文波束9、波束10,計算指向10個短報文波束的天線波束指向角即計算指向5顆GEO衛星的指向角,因此對于指向10個短報文波束的天線波束指向角:A1=A2,A3=A4,A5=A6,A7=A8,A9=A10。
2.3 波束總能量計算
根據載體的位置(經度、緯度)查找表1,確定載體所處位置10個北斗衛星下行短報文波束的信號能量P1~P10;根據計算的天線波束指向角A1~A10,查找表2,確定指向10個短報文波束的天線合成波束增益G1~G10,由于

因此,

每個北斗衛星的下行短報文波束到達載體接收端的總信號能量為S1~S10,

計算得到總信號能量的最大值Smax及對應的短報文波束號Nmax。
2.4 防波束頻繁切換設計及最優短報文波束選取
由于高動態載體工作過程中,若實時選取總信號能量最大的短報文波束作為最優波束,則可能會由于短報文波束頻繁切換導致短報文通信數據丟失,因此采取了防短報文波束頻繁切換設計。具體策略為,若當前時刻總信號能量最大值Smax大于前一時刻所選短報文波束號對應的當前總信號能量Spre超過1 dB,則最優短報文波束號為Nmax,否則依然保持前一時刻的短報文波束號為最優短報文波束號。
2.5 天線波束指向角確定
根據選定的最優短報文波束號Nopt,則其對應的天線波束指向角即為最終的載體天線波束指向角。最后采用空時聯合波束合成方法[16]進行天線波束合成指向。
3 模型仿真及分析
以某一具體型號的載體運動軌跡為例,對其運動過程中的最優短報文波束和天線波束指向角等進行仿真。
圖2為載體運動過程中的姿態角變化情況,包括俯仰角、橫滾角和偏航角,可以看到,載體運動過程中存在較大的姿態角變化,尤其是俯仰角的變化范圍較大,超過了±30°。
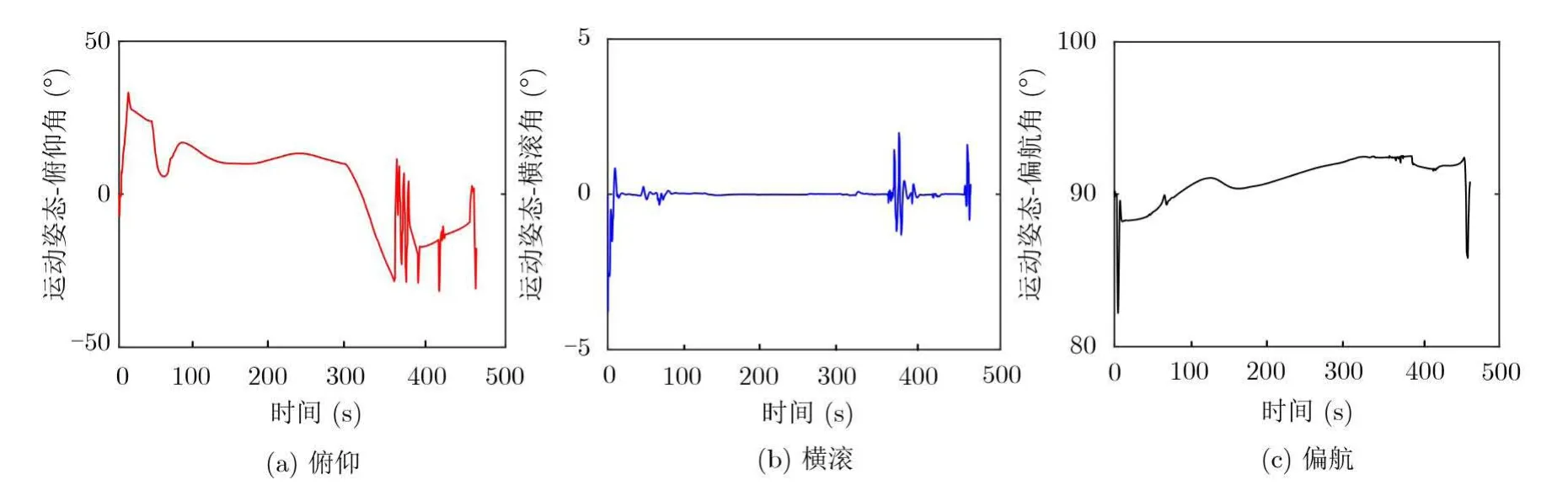
圖2 載體運動姿態角
采用本算法,仿真得到了載體運動過程中實時選取的最優短報文波束號、總信號能量(總鏈路增益)以及天線波束指向角,結果如圖3—圖6所示,其中天線指向角定義如圖7所示。從圖3可以看到,運動過程中選取的最優短報文波束,前半段為波束2,后半段為波束4,波束切換較少,波束選取穩定,未見頻繁波束切換;從圖4可以看到,運動過程中總信號能量變化幅度不超過2 dB,全程保持較高的接收信號能量,進一步表明該天線波束指向算法可以有效提高短報文通信性能。從圖5可以看到,運動過程中的天線波束指向角較小,俯仰角全程未超過50°,因此天線增益較高,表明天線波束指向算法的有效性;
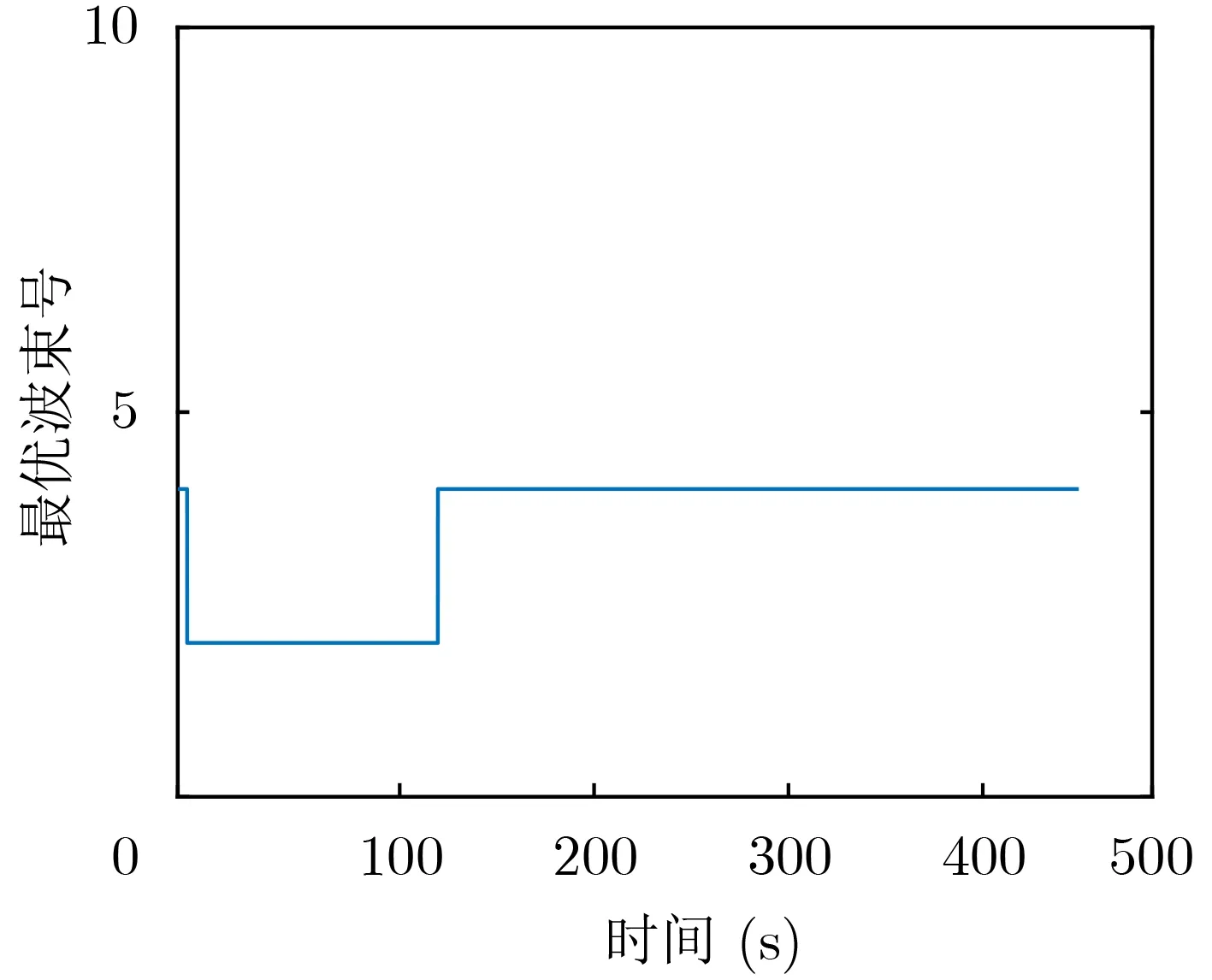
圖3 最優短報文波束號
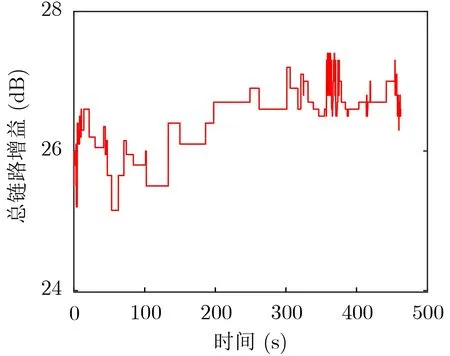
圖4 總鏈路增益
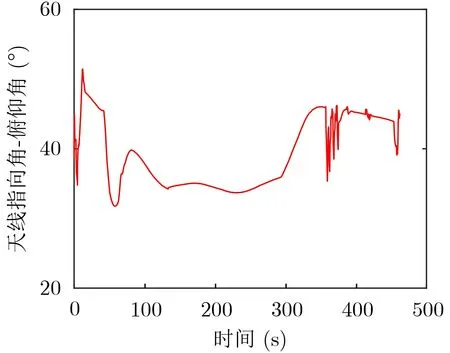
圖5 天線波束指向角-俯仰角
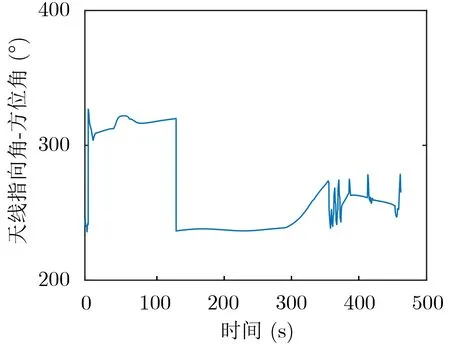
圖6 天線波束指向角-方位角
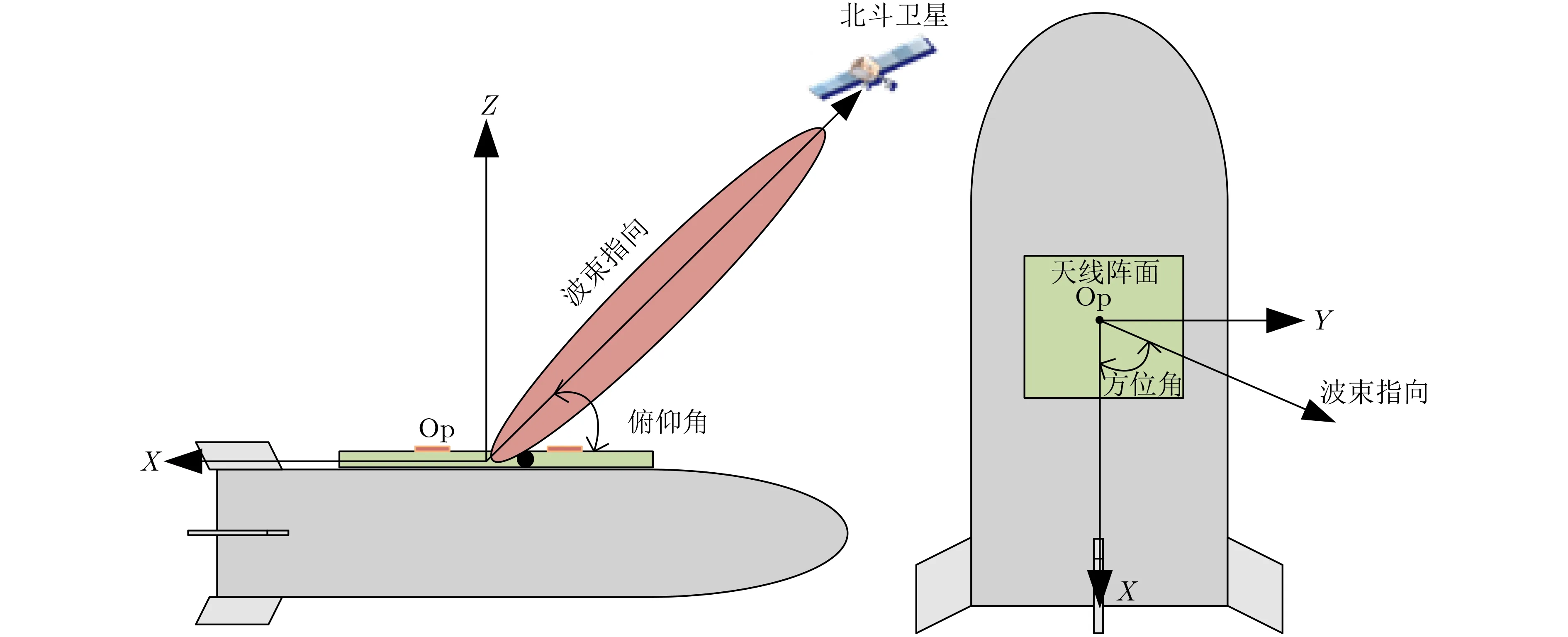
圖7 天線波束指向角定義
此外,還對同樣載體運動軌跡條件下,不采取防波束頻繁切換策略(即實時選取總信號能量最大的短報文波束)的算法情況進行了仿真。仿真得到的最優短報文波束號、總信號能量以及天線波束指向角如圖8—圖11所示。與圖3—圖6對比可以看到,載體運動前半段,若不采取防頻繁切換措施,會存在頻繁的波束切換,而此時的總信號能量并不比最優短報文波束時的總信號能量有明顯提高。因此,采取防頻繁切換策略后,可以避免短報文波束不必要的切換,同時還能保證較高的信號能量。
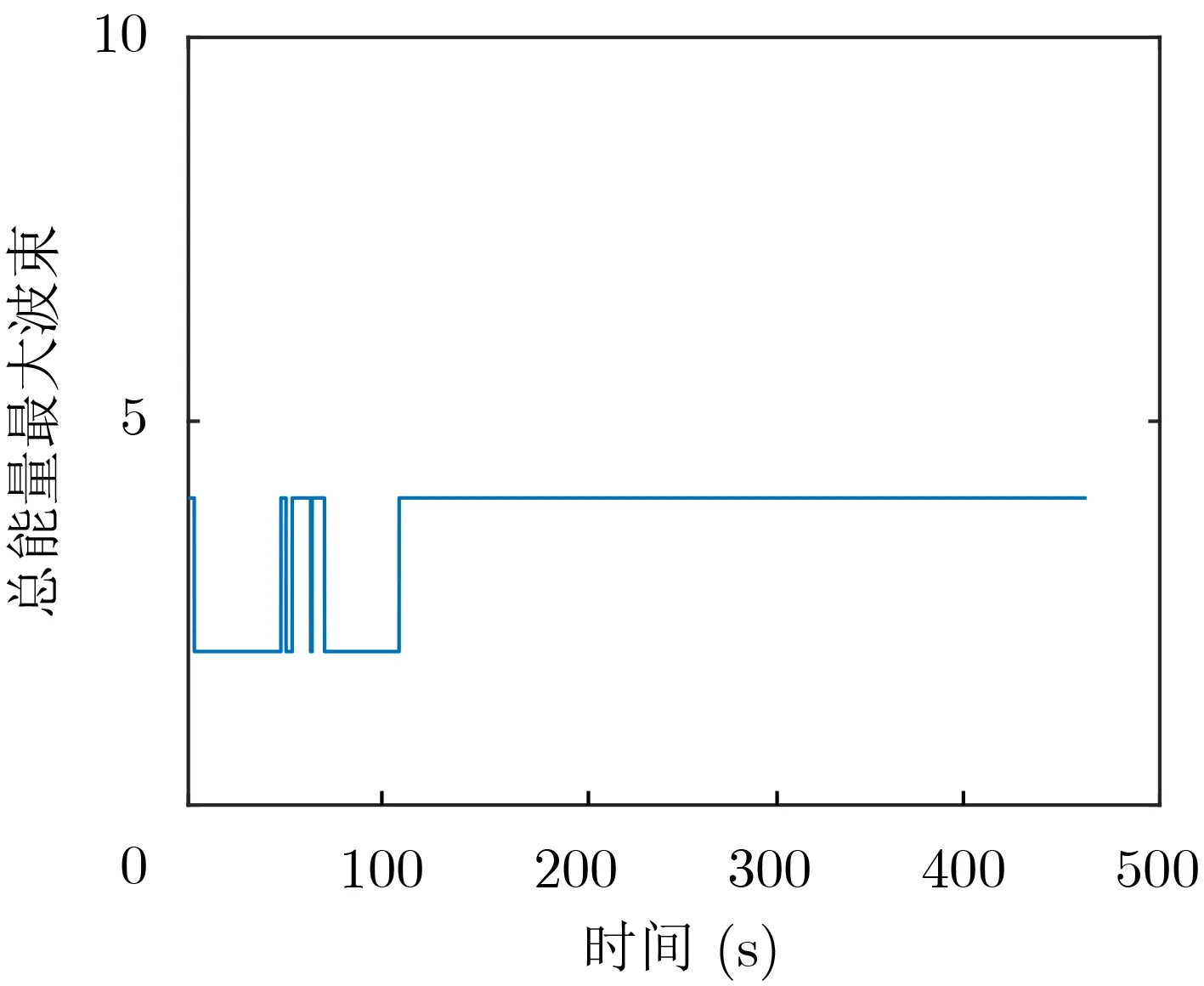
圖8 總能量最大短報文波束

圖9 總能量最大短報文波束的鏈路增益
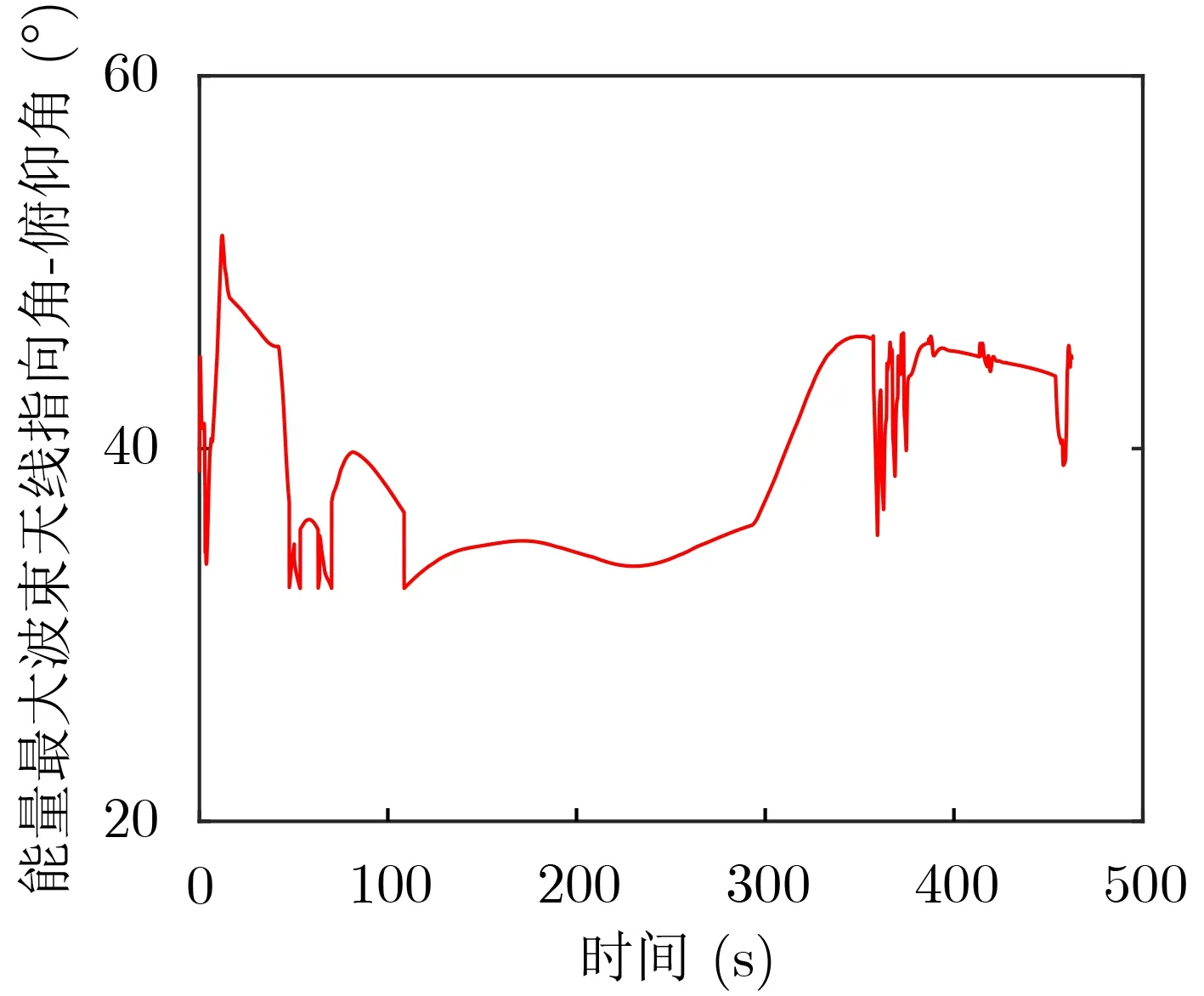
圖10 總能量最大短報文波束的天線波束指向角-俯仰角
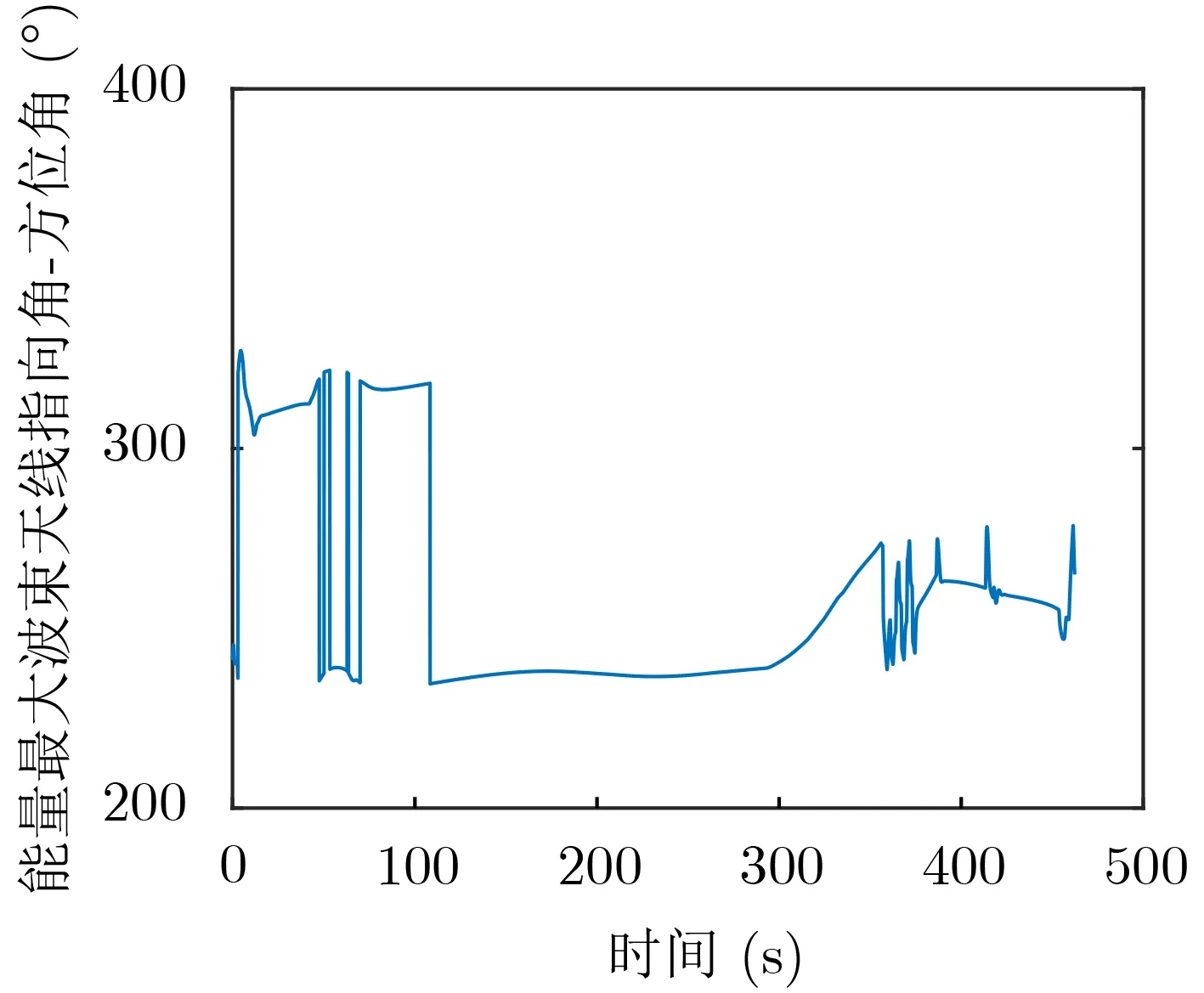
圖11 總能量最大短報文波束的天線波束指向角-方位角
4 結束語
在高動態載體的北斗短報文應用中,針對載體速度快、姿態變化大、飛行距離遠、跨短報文波束等特點,本文給出了一種適用于北斗短報文通信的天線波束指向算法,根據載體的位置、姿態以及北斗衛星下行短報文波束的信號能量,實時選取最優的短報文波束進行通信以及天線波束指向。該算法已經在某型號中成功應用,極大地提高了短報文通信性能,也能夠為后續高動態載體的北斗短報文通信應用或其他衛星通信應用提供指導。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
