基于STM32的智能物料搬運小車的設計
2021-10-30 07:07:42何宗志李海華崔志遠李鵬飛
智能城市 2021年18期
何宗志 李海華 張 琳 崔志遠 李鵬飛
(河南科技大學機電工程學院,河南洛陽 471003)
1 比賽場地、物料尺寸及放置要求
1.1 比賽場地
賽場采用近水平鋪設,尺寸為4 800 mm×2 400 mm的長方形平面區域,如圖1所示。
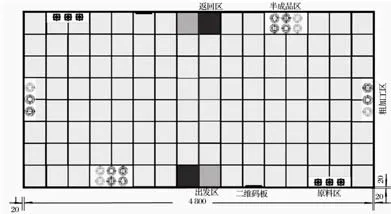
圖1 比賽場地(單位:mm)
賽場周圍設有擋板(無高度限制,顏色和高度不做任何要求,僅作為場地邊界),由于邊界擋板的不確定性,故不適合用邊界測距的方式確定小車的位置。賽道地面為亞光白色或淺黃色等淺色底色,路線有線寬為20 mm、線中心距為300 mm的黑色方格組成。比賽場地內,設置半成品區、精加工區、原料區、粗加工區、出發區、返回區、庫存區。決賽時拆除擋板。
1.2 比賽所搬運的物料
搬運的物料模型圖由solidworks繪制,利用3d打印機用三種不同顏色(紅、綠、藍)PLA耗材打印出模型。
搬運的物料所放置的原料區和庫存區的尺寸(長×寬×高)為580 mm×145 mm×(80~100)mm雙層貨架,白色啞光,原料區的高度為100 mm,物料采用顏色識別,庫存區貨架高度為80~100 mm,采用條形碼識別物料放置位置。
物料尺寸、原料區和庫存區如圖2、圖3所示。
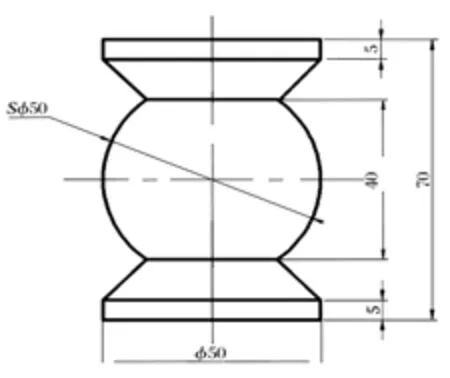
圖2 物料尺寸(單位:mm)

圖3 原料、庫存區(單位:mm)
1.3 物料放置的要求
依據小車放置的物料接觸的最外一圈色環,通過查表得出分數,如表1所示。

表1 環號及環尺寸
2 系統設計
2.1 主控制器
主控芯片采用STM32F103ZET6,為中等容量增強型,32位基于ARM核心的128 kB字節閃存微控制器USB、CAN,7個定時器、2個ADC、9個通信接口、2個12位模數轉換器,1 μs轉換時間(多達16個輸入通道);ARM 32位的Cortex?-M3 CPU(最高72 MHz工作頻率),內核為Cortex-M3,該款處理器適合處理大量信息和同時控制多個硬件,能夠較好地處理此次比賽。
Cortex-M3模塊如圖3所示。
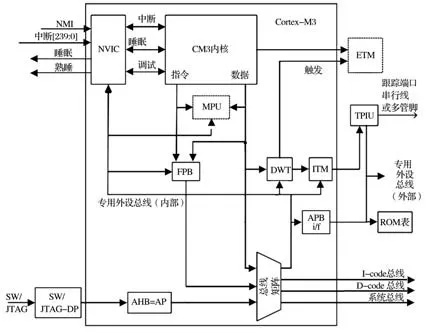
圖4 Cortex-M3模塊
2.2 顏色識別與捕捉設計
匹配原裝進口芯片TCS3200的顏色識別傳感器,8引腳SOIC表面貼片式封裝。
芯片集成64個光電二極管,其中16個光電二極管(帶紅色濾波器)、16個光電二極管(綠色濾波器)、16個光電二極管(藍色濾波器)、16個光電二極管(無任何濾波器)。64個二極管可以用于接收全部的光信息。由于光電二極管為交叉排列式,能夠有效保證入射光輻射的均勻性,提高顏色識別的精確性。
2.3 電源模塊設計
采用12 V鋰電池分別為直流減速電機和單片機以及傳感器供電,除了給電機提供12 V電源以外,其余電壓供電方式采用L7812CV三端電源穩壓模塊進行供電。提供正常工作的5 V直流電壓給單片機,提供正常工作的7.2 V直流電壓給數字電機(機械手組件)。
2.4 灰度傳感器巡線設計
采用四路灰度傳感器,X軸和Y軸方向各裝一個,用于循跡和記錄小車所處位置。采用進口聚光高亮LED,前置發光探頭設計,可在一定范圍內抵抗巡線賽;場地燈光和環境光的干擾;配合四路線性可調電阻,靈敏度、穩定性更高。數字信號以1或0輸出,編程控制簡單;根據場地光線等情況調節信號靈敏度。電壓比較器有兩個電壓輸入,一個為接收管的電壓,一個為電位器輸入的基準電壓,根據接收管2種色的電壓值調節基準電壓。
2.5 超聲波避障設計
避障模塊采用超聲波避障模塊HC-SR04,在一定距離內能夠高效地檢測障礙物與小車的距離,并將檢測的距離與程序設定的安全距離進行判定,判斷是否需要啟動自動避障動作。對外界發送40 kHz的工作頻率,可自行設定每秒發射超聲波的次數(過高會加重單片機內核運算負荷,過低會導致距離檢測不及時,無法地避障)。超聲波模塊將反射時間輸入給單片機內核,單片機將時間帶入聲波和距離計算公式,即可計算小車與障礙物的距離,有效躲避障礙物。
3 系統軟件設計
3.1 系統整體軟件設計思路
軟件流程如圖5所示。

圖5 軟件流程
采用配備雙霍爾磁性編碼器775減速直流電機碼盤的直流減速電機。根據比賽賽道建立絕對坐標系和相對坐標系,單片機根據傳感器和電機采集的數據進行計算,得出小車所處位置,讓小車執行相應的指令。執行指令過程中,通過小車自身傳感器配以PI算法產生中斷對指令的執行進行微調,更好地完成任務。執行的任務有采用GM65條形碼/二維碼掃描識別模塊掃描二維碼接受任務和掃描條形碼確定物品;內部算法定位,用配以顏色識別模塊和距離傳感器的機械臂(20 kg數字舵機)抓取物品運送到指定區域;單片機讀取速度并控制速度最終計算出行駛的距離,確定小車自身所處位置,采用兩個四路灰度傳感器循跡并識別路線;執行的任務通過LCD1602字符液晶屏顯示。
3.2 搬運目標顏色識別軟件設計
本設計利用TCS3200D顏色傳感器模塊對搬運目標進行識別。對TCS3200D顏色傳感器模塊進行初始化,即進行白平衡設置;單片機通過傳感器采集搬運物品反射光線的信息;通過程序進行三基色分離,通過RGB中三種顏色設置的參數值范圍識別顏色。軟件程序流程如圖6所示。

圖6 軟件程序流程
4 結語
程序高效地安排了程序運行時間,有效提高了程序運行的速率,編譯的程序能夠快速發現錯誤并修改,滿足了比賽中遇到比賽任務改變的情況。小車在賽道上運行平穩,能夠有效執行任務。軟、硬件均經過多次測試,保障在運行穩定,出現問題時內部檢測系統能夠及時報錯,便于修改。
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年12期)2018-08-01 00:48:04
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
電子制作(2017年19期)2017-02-02 07:08:27