一種IPMSM無位置傳感器系統(tǒng)設(shè)計(jì)的新方法
2021-10-28 07:39:24夏超英肖朋超
電力系統(tǒng)及其自動(dòng)化學(xué)報(bào) 2021年10期
夏超英,肖朋超
(天津大學(xué)電氣自動(dòng)化與信息工程學(xué)院,天津 300072)
隨著高性能永磁材料、電力電子技術(shù)和微處理器技術(shù)的發(fā)展,永磁同步電機(jī)PMSM(permanent magnet synchronous motor)的控制性能越來越好,應(yīng)用越來越廣泛[1]。實(shí)際應(yīng)用中,PMSM采用最多的控制策略是矢量控制,一般通過安裝旋轉(zhuǎn)變壓器或編碼器等傳感器獲得轉(zhuǎn)子位置和速度。然而,安裝傳感器除受環(huán)境和空間的限制外,還增加系統(tǒng)成本,且易受電磁干擾的影響。因此,在惡劣環(huán)境和對(duì)系統(tǒng)成本比較敏感的應(yīng)用場(chǎng)合,PMSM無位置傳感器技術(shù)得到了應(yīng)用,相關(guān)理論和方法的研究得到了重視[2]。
目前,學(xué)者們對(duì)于PMSM無位置傳感器控制的研究主要包括兩大類,即適用于中高速的算法和適用于低速甚至零速的算法。其中,適用于中高速范圍的無位置傳感器控制算法有磁鏈估計(jì)法、滑模觀測(cè)器法、模型參考自適應(yīng)法、擴(kuò)展卡爾曼濾波器法等[3-7]。這些算法一般是針對(duì)表貼式永磁同步電機(jī)SPMSM(surface permanent magnet synchronous mo?tor),基于靜止坐標(biāo)下SPMSM的電壓磁鏈數(shù)學(xué)模型得到反電勢(shì),通過反正切計(jì)算或鎖相環(huán)得到轉(zhuǎn)子位置。對(duì)于內(nèi)置式永磁同步電機(jī)IPMSM(interior per?manent magnet synchronous motor),由于交直軸電感不同,靜止坐標(biāo)系下的電感是轉(zhuǎn)子位置的函數(shù),使得IPMSM無位置傳感器控制系統(tǒng)的設(shè)計(jì)要困難的多[8-10]。文獻(xiàn)[8-9]分析了適用于SPMSM無位置傳感器控制的方法不能用于IPMSM的原因,提出了適用于IPMSM的擴(kuò)展反電勢(shì)EECMF(extended counter electromotive force)模型,在估計(jì)出EEMF后,就可以像SPMSM中的反電勢(shì)那樣從它的相位中得到轉(zhuǎn)子磁鏈的位置估計(jì)值。文獻(xiàn)[8-9]中使用擾動(dòng)觀測(cè)器得到估計(jì)的擴(kuò)展反電勢(shì),然后使用反正切運(yùn)算得到轉(zhuǎn)子的位置估計(jì)值,通過自適應(yīng)觀測(cè)器得到估計(jì)轉(zhuǎn)速,實(shí)現(xiàn)了IPMSM的無位置傳感器控制,但是參數(shù)配置方法復(fù)雜,并且反正切函數(shù)對(duì)于噪聲敏感,易造成轉(zhuǎn)子位置估計(jì)偏差;文獻(xiàn)[10]基于擴(kuò)展反電勢(shì)模型,使用擴(kuò)展卡爾曼方法得到估計(jì)的EEMF,通過反正切運(yùn)算得到轉(zhuǎn)子位置,實(shí)現(xiàn)了IPMSM的無位置傳感器控制,但是擴(kuò)展卡爾曼方法設(shè)計(jì)復(fù)雜,運(yùn)算量大,并且方差矩陣設(shè)計(jì)影響算法的收斂性[11]。
在電機(jī)低速甚至零速時(shí),由于反電勢(shì)很小甚至為零,上述觀測(cè)算法失效。現(xiàn)有文獻(xiàn)中研究的PMSM低速甚至零速的無位置傳感器方法,主要是利用凸極性檢測(cè)轉(zhuǎn)子的位置。最典型的算法是通過向IPMSM中注入遠(yuǎn)高于基波頻率的電壓激勵(lì),檢測(cè)電機(jī)的高頻電流響應(yīng),獲取轉(zhuǎn)子位置信息。但注入高頻電壓會(huì)產(chǎn)生轉(zhuǎn)矩脈動(dòng)[12]。除了上述高頻注入法外,還有一些開環(huán)的觀測(cè)算法,如V/F(壓頻比)和I/F(流頻比)控制策略,但這些算法由于沒有轉(zhuǎn)速閉環(huán),不適用于對(duì)動(dòng)態(tài)響應(yīng)要求較高的場(chǎng)合[13]。
本文給出一種IPMSM無位置傳感器系統(tǒng)設(shè)計(jì)方案,由轉(zhuǎn)子永磁磁鏈角的估計(jì)值和同步坐標(biāo)系下定子磁鏈的代數(shù)模型得到定子磁鏈估計(jì)值,經(jīng)旋轉(zhuǎn)變換后與靜止坐標(biāo)系下由定子電壓電流積分模型得到的定子磁鏈進(jìn)行比較形成反饋閉環(huán)來抑制積分漂移,并利用兩者的叉積經(jīng)鎖相環(huán)得到IPMSM轉(zhuǎn)子位置和轉(zhuǎn)速估計(jì)值。與已有的EEMF狀態(tài)觀測(cè)器方法相比較,本文所提方法簡(jiǎn)單且動(dòng)、靜態(tài)估計(jì)性能更好。最后通過仿真和實(shí)驗(yàn)驗(yàn)證了所提出算法的可行性和有效性,試驗(yàn)中為提高系統(tǒng)的低速性能,對(duì)逆變器非線性進(jìn)行了補(bǔ)償。
1 傳統(tǒng)的位置及轉(zhuǎn)速估計(jì)方法
IPMSM在兩相靜止坐標(biāo)系下的電壓、磁鏈數(shù)學(xué)模型為
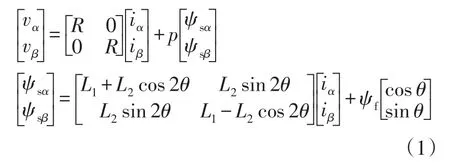
式中:vα、vβ、iα、iβ分別為靜止坐標(biāo)系下IPMSM定子電壓、電流的α軸分量和β軸分量;R為電機(jī)定子電阻;ψsα、ψsβ分別為定子磁鏈的α軸分量和β軸分量;θ為轉(zhuǎn)子位置角;ψf為永磁磁鏈;p為微分算子;,Ld和 Lq分別為IPMSM的直軸電感和交軸電感。
對(duì)于SPMSM,因?yàn)橛?Ld=Lq=L,因此,式(1)中的L2=0,故SPMSM靜止坐標(biāo)系下的電壓磁鏈方程與轉(zhuǎn)子角θ無關(guān)[14]。文獻(xiàn)[14]使用定子電壓電流積分得到定子磁鏈 ψsα、ψsβ和轉(zhuǎn)子永磁磁鏈 ψfα、ψfβ,再利用鎖相環(huán)PLL(phase-locked loop),即可得到估計(jì)的轉(zhuǎn)子位置θ?和轉(zhuǎn)速ω?,如圖1所示。為克服積分漂移,圖1中的積分運(yùn)算用大慣性環(huán)節(jié)代替,由于低頻時(shí)這會(huì)帶來觀測(cè)誤差,故系統(tǒng)的低速性能受到限制。
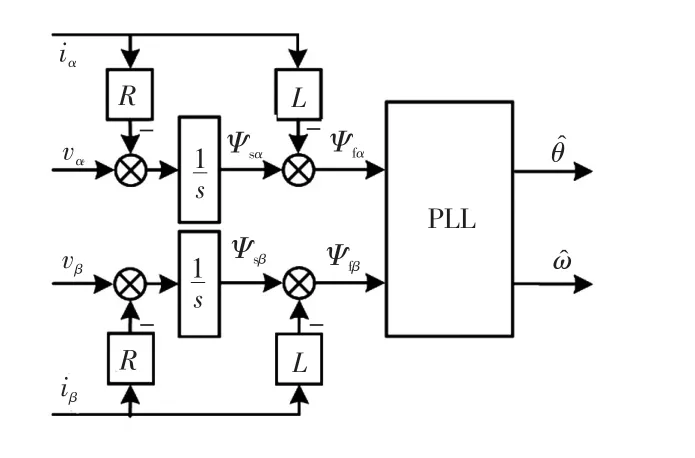
圖1 隱極電機(jī)轉(zhuǎn)子位置和轉(zhuǎn)速估計(jì)框圖Fig.1 Block diagram of estimation of SPMSM rotor’s position and speed
對(duì)于IPMSM,由于 Ld≠Lq,L2≠0,由式(1)可知,IPMSM靜止坐標(biāo)系下的電壓磁鏈方程與轉(zhuǎn)子位置θ相關(guān),圖1給出的轉(zhuǎn)子位置估計(jì)方法不能使用[15]。為此,文獻(xiàn)[8-9]中引入了擴(kuò)展反電勢(shì)的概念,即根據(jù)式(1),得到IPMSM用擴(kuò)展反電勢(shì)描述的模型為
式中:eα和eβ為擴(kuò)展反電勢(shì)的α軸、β軸分量;ω為電機(jī)的電角速度;id、iq分別為電機(jī)定子電流的直軸和交軸分量;θ為電機(jī)轉(zhuǎn)子位置角。由式(2)可以看出,引入擴(kuò)展反電勢(shì)eα、eβ后,IPMSM的電壓方程中不再含有轉(zhuǎn)子位置角θ(但含有電角速度),且電機(jī)定子的交、直軸電流和轉(zhuǎn)速只影響擴(kuò)展反電勢(shì)的幅值。
根據(jù)IPMSM的擴(kuò)展反電動(dòng)勢(shì)模型式(2),建立狀態(tài)觀測(cè)器[16],認(rèn)為轉(zhuǎn)速是一個(gè)慢變化的量處理成常數(shù),得到擴(kuò)展反電勢(shì)阻尼為零的二階自振模型為

如前所述,擴(kuò)展反電勢(shì)矢量eαβ的模值與定子電流id、iq和轉(zhuǎn)速ω有關(guān),當(dāng)轉(zhuǎn)矩電流突變或轉(zhuǎn)速快速變化時(shí),其幅值會(huì)劇烈變化,導(dǎo)致轉(zhuǎn)子位置和轉(zhuǎn)速的動(dòng)態(tài)估計(jì)偏差大。另外,式(2)電壓方程中系統(tǒng)矩陣A雖然不是θ的函數(shù),但含有估計(jì)的轉(zhuǎn)速,在轉(zhuǎn)速突然變化時(shí),轉(zhuǎn)速估計(jì)偏差也會(huì)引起轉(zhuǎn)子位置估計(jì)偏差。
2 本文所提出的轉(zhuǎn)子位置估計(jì)方法
在永磁同步電機(jī)無位置傳感器系統(tǒng)設(shè)計(jì)中,往往配有鎖相環(huán),因此在本文中給出的設(shè)計(jì)方案中,提出一種定子磁鏈計(jì)算中抑制積分漂移結(jié)合鎖相環(huán)的設(shè)計(jì)方法,如圖2所示。
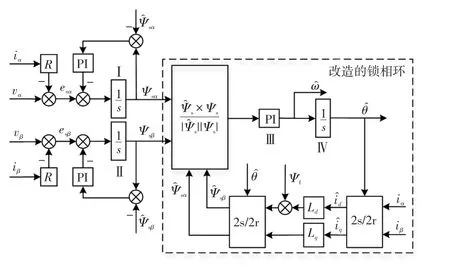
圖2 本文所提出的轉(zhuǎn)子位置估計(jì)系統(tǒng)框圖Fig.2 Block diagram of the proposed rotor position estimation system
在圖2的方案中,由轉(zhuǎn)子永磁磁鏈定向的同步旋轉(zhuǎn)坐標(biāo)下定子磁鏈代數(shù)模型和用鎖相環(huán)得到的轉(zhuǎn)子永磁磁鏈方向角估計(jì)值?,得到定子磁鏈估計(jì)值為

式中:ξ為系統(tǒng)阻尼系數(shù),取ξ=0.707;ωn是系統(tǒng)的無阻尼震蕩頻率,根據(jù)電機(jī)的運(yùn)行轉(zhuǎn)速范圍,ωn取為1 000 rad/s。因?yàn)镻LL為二型系統(tǒng),當(dāng)轉(zhuǎn)速為階躍輸入,θ為斜坡輸入,可以實(shí)現(xiàn)無靜態(tài)誤差,即穩(wěn)態(tài)下θ-?→0;對(duì)于轉(zhuǎn)速的斜坡輸入,θ為拋物線輸入,有靜態(tài)誤差,且靜態(tài)誤差的大小與ki成反比。
3 仿真分析與比較
本節(jié)通過仿真驗(yàn)證圖2方案在平衡點(diǎn)的漸近穩(wěn)定性及其抑制定子磁鏈積分漂移的性能,并就位置估計(jì)的動(dòng)、靜態(tài)性能與擴(kuò)展反電勢(shì)方法進(jìn)行比較。仿真中IPMSM定子電阻R為0.1 Ω,直軸電感Ld和交軸電感Lq分別為0.368 mH和0.7 mH,永磁磁鏈 ψf為0.14 Wb。
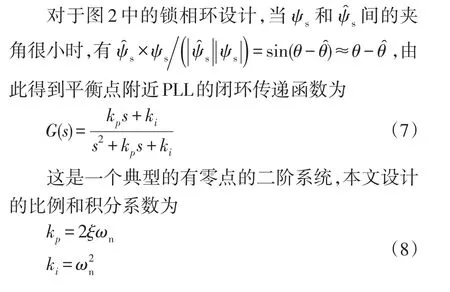
顯然,上述方案是非線性的,穩(wěn)定性和輸入相關(guān)聯(lián)(圖2系統(tǒng)并非在任意定子電壓、電流輸入下的漸近穩(wěn)定系統(tǒng))。為驗(yàn)證圖2系統(tǒng)在正弦電壓、電流輸入下的漸近穩(wěn)定性,只需考察4個(gè)積分器不同初值下的系統(tǒng)響應(yīng)是否收斂到一起即可。圖3給出了電機(jī)恒速運(yùn)行在30 rad/s,Ⅰ、Ⅱ、Ⅲ、Ⅳ積分器初值為0.1 Wb、-0.05 Wb、40 rad/s、5.9 rad(初始條件1)和0.09 Wb、0.06 Wb、20 rad/s、0.6 rad(初始條件2)時(shí)的仿真結(jié)果。仿真結(jié)果表明圖2給出的設(shè)計(jì)方案,在正弦電壓、電流輸入下將收斂到平衡狀態(tài)。
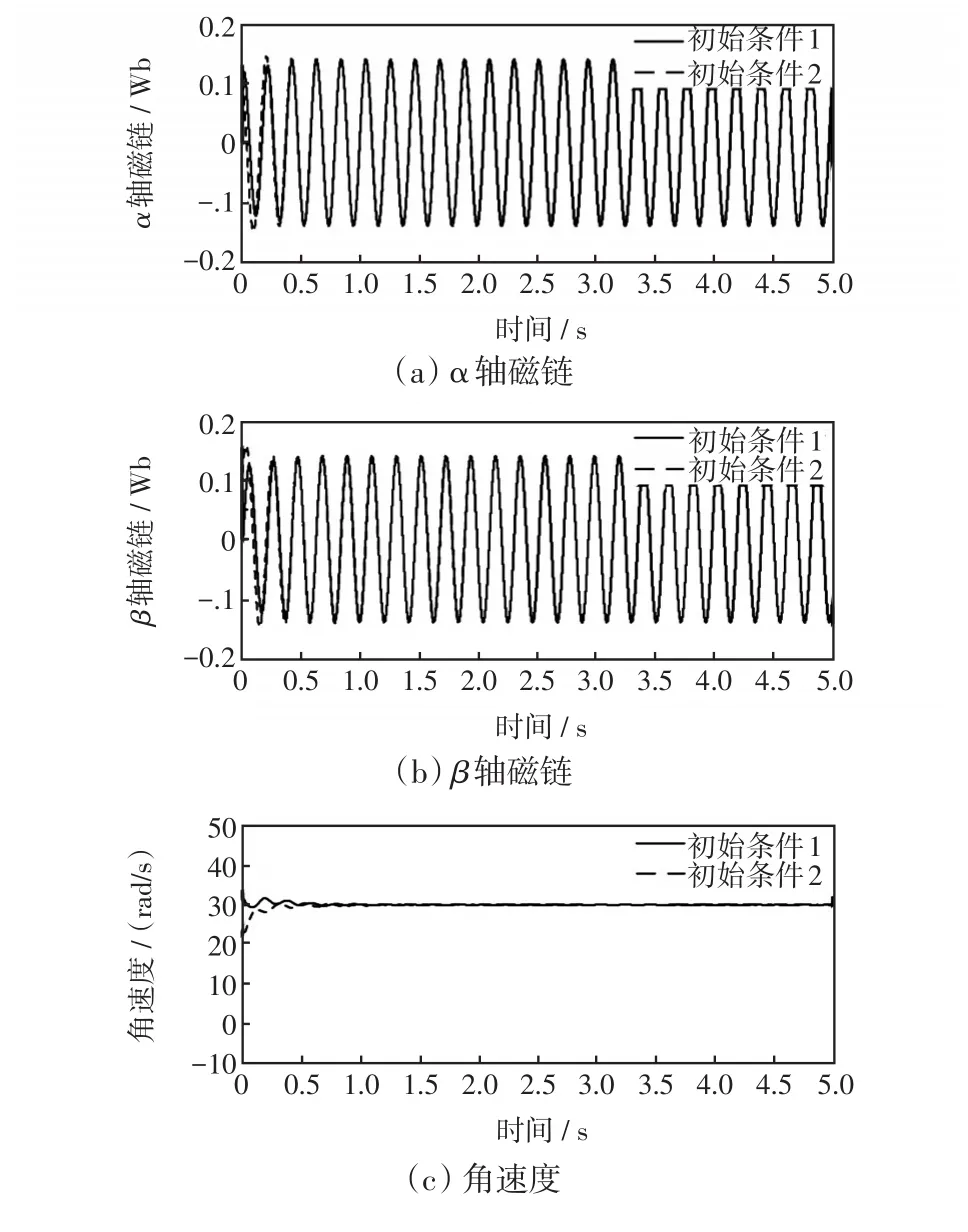
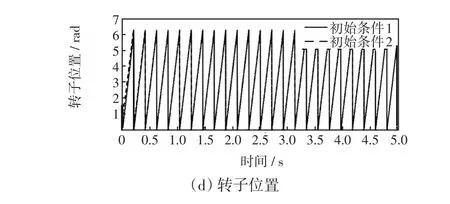
圖3 不同積分初值情況下系統(tǒng)響應(yīng)Fig.3 System response under different initial values of integral
電機(jī)恒速運(yùn)行在30 rad/s,此時(shí)定子反電勢(shì)幅值為4.2 V,以α軸為例,圖4給出在定子反電勢(shì)中含有0.1 V的直流偏置時(shí),不加反饋和加反饋?zhàn)饔茫≒I調(diào)節(jié)器比例和積分系數(shù)取為100和200)2種情況的對(duì)比。其中,有反饋時(shí)PI調(diào)節(jié)器的參數(shù)可以在很寬的范圍內(nèi)選取,并能獲得好的調(diào)節(jié)效果。可以看出,在不加定子磁鏈偏差反饋時(shí),磁鏈積分輸出出現(xiàn)嚴(yán)重的積分漂移問題,在加入反饋之后,積分漂移得到了很好的抑制。
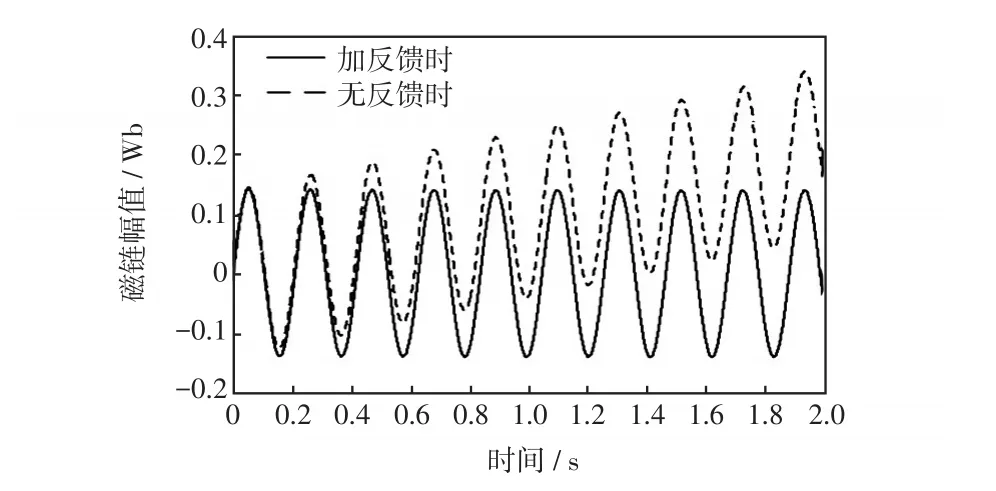
圖4 直流偏置下加反饋和無反饋時(shí)積分輸出對(duì)比Fig.4 Comparison of integral output with and without feedback under DC bias
為驗(yàn)證所提出算法的動(dòng)態(tài)性能,在轉(zhuǎn)矩電流突變的情況下與EEMF狀態(tài)觀測(cè)器法進(jìn)行仿真比較;仿真時(shí)2種方法的鎖相環(huán)頻帶均為1 000 rad/s。狀態(tài)觀測(cè)器反饋增益矩陣根據(jù)李雅普諾夫穩(wěn)定性原理配置[19]。
圖5(a)顯示了電機(jī)帶12 N·m負(fù)載的變速運(yùn)行曲線,開始時(shí)電機(jī)1 000 r/min勻速運(yùn)行,在0.5 s時(shí)電機(jī)轉(zhuǎn)矩電流階躍至40 A,電機(jī)隨之加速至2 200 r/min,之后轉(zhuǎn)矩電流減至19.67 A與負(fù)載平衡勻速運(yùn)行,在1.5 s時(shí)轉(zhuǎn)矩電流階躍至0 A,電機(jī)在負(fù)載轉(zhuǎn)矩作用下減速至1 000 r/min。圖5(b)顯示了電機(jī)轉(zhuǎn)矩電流的變化情況;圖5(c)和圖5(d)分別顯示了2種方法在轉(zhuǎn)矩電流突變時(shí)轉(zhuǎn)子位置和轉(zhuǎn)速估計(jì)偏差波形。可以看出,在轉(zhuǎn)矩電流突變時(shí),基于EEMF觀測(cè)器的設(shè)計(jì)方案,位置和轉(zhuǎn)速估計(jì)均出現(xiàn)了明顯的振蕩,而本文所提方案卻幾乎沒有這種振蕩。在電機(jī)穩(wěn)速運(yùn)行時(shí),2種方法的位置和轉(zhuǎn)速估計(jì)偏差都為零,在電機(jī)加減速過程中,電機(jī)轉(zhuǎn)速為時(shí)間的斜坡函數(shù),轉(zhuǎn)子位置為時(shí)間的拋物線函數(shù),鎖相環(huán)是一個(gè)Ⅱ型系統(tǒng),所以會(huì)有一定的穩(wěn)態(tài)誤差,穩(wěn)態(tài)誤差為常值且大小與角加速度成正比,與鎖相環(huán)中積分系數(shù)成反比;電機(jī)在變速時(shí)的角加速度為508.5 π/s2,鎖相環(huán)中積分系數(shù)ki=106,所以理論上鎖相環(huán)會(huì)造成0.001 597 rad的估計(jì)偏差。如圖5所示,使用本文的設(shè)計(jì)方案轉(zhuǎn)子位置估計(jì)偏差最大為0.002 2 rad,角速度估計(jì)偏差最大為0.2 rad/s,基于EEMF狀態(tài)觀測(cè)器的算法轉(zhuǎn)子位置估計(jì)偏差最大為0.008 rad,角速度估計(jì)偏差最大為3 rad/s,基本與理論計(jì)算相符合。
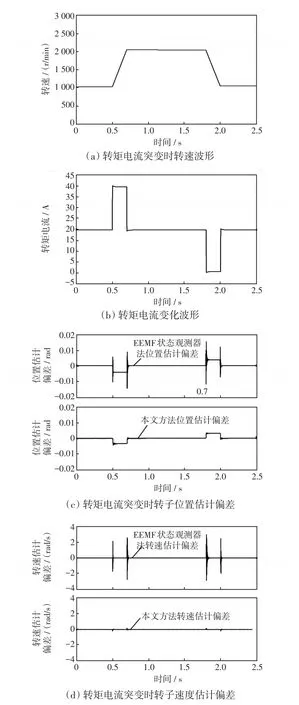
圖5 轉(zhuǎn)矩電流突變時(shí)仿真結(jié)果Fig.5 Simulation results when torque current changes suddenly
4 實(shí)驗(yàn)結(jié)果與分析
使用本文所提出的方法在PE-expert4平臺(tái)上進(jìn)行實(shí)驗(yàn)。PE-Expert4平臺(tái)是電力電子與電機(jī)控制系統(tǒng)的開發(fā)實(shí)驗(yàn)平臺(tái),以TI公司的高速浮點(diǎn)DSP(TMS320C6657)為核心,PE-View X集成開發(fā)環(huán)境結(jié)合使用,方便電機(jī)控制系統(tǒng)的開發(fā)。PWM使用10 kHz的載波調(diào)制輸出,算法的控制周期是100 μs。實(shí)驗(yàn)中轉(zhuǎn)子位置估計(jì)需要的定子電壓由電機(jī)指令電壓重構(gòu)得到,直流母線電壓為200 V。使用旋轉(zhuǎn)變壓器得到轉(zhuǎn)子實(shí)際位置,該位置僅用于與估計(jì)位置作對(duì)比,不用于IPMSM的調(diào)速控制,所使用電機(jī)的額定參數(shù)如表1。

圖6 PE-Expert4電機(jī)控制系統(tǒng)Fig.6 PE-Expert4 motor control system
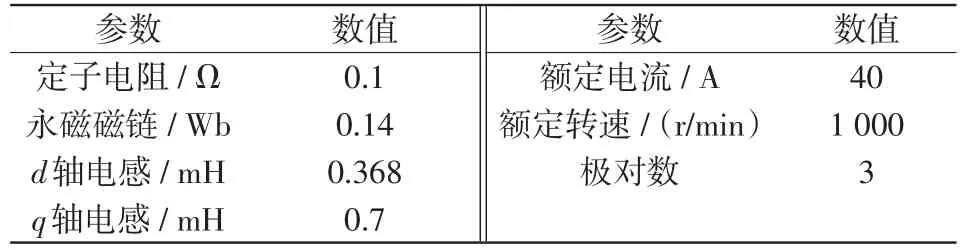
表1 IPMSM額定參數(shù)Tab.1 Rated parameters of IPMSM
4.1 逆變器非線性補(bǔ)償
通過PWM調(diào)制向電機(jī)施加電壓時(shí),逆變器死區(qū)和IGBT的導(dǎo)通壓降會(huì)對(duì)逆變器的輸出電壓造成影響,尤其是在低速時(shí),非線性將使得電機(jī)電壓、電流波形畸變[20]。在本設(shè)計(jì)中,電機(jī)定子電壓信號(hào)根據(jù)電壓給定信號(hào)得到,因?yàn)槟孀兤鞯姆蔷€性特性,特別在低速、低電壓工況下,它會(huì)與實(shí)際定子電壓信號(hào)產(chǎn)生較大偏差,并明顯影響定子磁鏈電壓電流模型的觀測(cè)效果。為獲得系統(tǒng)更好的低速控制性能,對(duì)逆變器輸出電壓非線性進(jìn)行補(bǔ)償是非常必要和重要的一步。
由于A、B、C三相對(duì)稱,本文以對(duì)逆變器A相輸出電壓非線性補(bǔ)償為例進(jìn)行說明。逆變器連接被測(cè)電機(jī),首先向A相繞組施加正的直流電壓矢量,當(dāng)電流進(jìn)入穩(wěn)態(tài)時(shí)記錄此時(shí)的電流值,電壓指令值逐漸增加,直到電流達(dá)到最大值后,按照相同的方法給電機(jī)施加負(fù)向的直流電壓矢量,分別記錄下對(duì)應(yīng)的電流值。由本文實(shí)驗(yàn)所采集的數(shù)據(jù)畫出散點(diǎn)圖并使用Matlab擬合出逆變器-電機(jī)系統(tǒng)的伏安特性曲線如圖7所示。

圖7 逆變器伏安特性曲線Fig.7 V-A characteristic curve of inverter
將圖7中散點(diǎn)圖的前7個(gè)點(diǎn)和最后7個(gè)點(diǎn)劃分為線性區(qū)域,其他采樣點(diǎn)作為非線性區(qū)域。利用最小二乘法對(duì)上述曲線的線性區(qū)域進(jìn)行擬合,求得兩段線性區(qū)的斜率均為10,它由電機(jī)繞組的線性電阻決定,由此得到被測(cè)電機(jī)的定子電阻為

將對(duì)應(yīng)的指令電壓減去電機(jī)電流乘以上面得到的定子電阻,得到逆變器在不同電流下的輸出電壓誤差Δu,如圖8所示,根據(jù)定子電流對(duì)逆變器輸出電壓進(jìn)行的誤差補(bǔ)償為
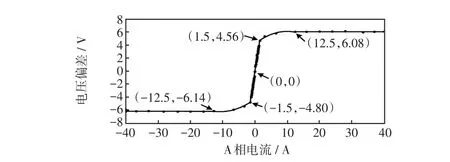
圖8 逆變器輸出電壓誤差曲線Fig.8 Inverter output voltage error curve

式中:u?為未考慮逆變器非線性時(shí)的指令電壓,用來作為定子磁鏈電壓、電流模型的輸入;u為考慮逆變器非線性補(bǔ)償后的指令電壓值,用來決定脈寬調(diào)制的占空比。
為驗(yàn)證非線性補(bǔ)償后的效果,使電機(jī)在額定負(fù)載下運(yùn)行于30 r/min。如圖9為補(bǔ)償后的電機(jī)定子A相電壓指令波形與實(shí)際電流波形,由電流波形可以看出,經(jīng)逆變器非線性補(bǔ)償后,電流的正弦性很好。
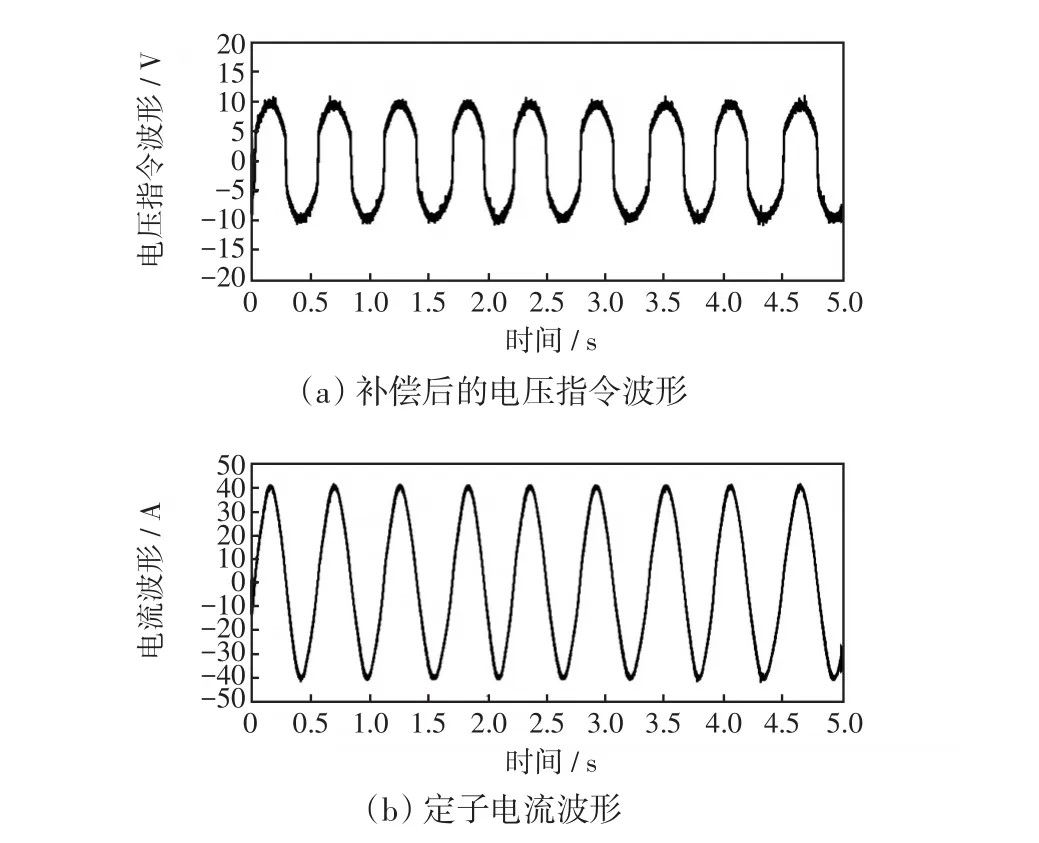
圖9 30 r/min時(shí)補(bǔ)償后的A相電壓指令與定子電流波形Fig.9 Phase-A voltage command and stator current waveforms at 30 r/min after compensation
4.2 實(shí)驗(yàn)驗(yàn)證
為了驗(yàn)證所提出方法在電機(jī)帶額定負(fù)載轉(zhuǎn)速階躍變化時(shí)的轉(zhuǎn)子位置估計(jì)性能,首先使電機(jī)加速至100 r/min然后恒速運(yùn)行,使用測(cè)功機(jī)對(duì)其施加15 N·m負(fù)載,在2.5 s左右給定100~200 r/min的轉(zhuǎn)速階躍指令,實(shí)驗(yàn)結(jié)果如圖10所示。
圖10(a)為電機(jī)參考轉(zhuǎn)速、實(shí)際轉(zhuǎn)速、估計(jì)轉(zhuǎn)速及轉(zhuǎn)速估計(jì)偏差曲線,由圖可知本文所提出算法估計(jì)的轉(zhuǎn)速能夠始終跟蹤電機(jī)實(shí)際轉(zhuǎn)速,并且穩(wěn)態(tài)時(shí)轉(zhuǎn)速估計(jì)偏差大約在10 r/min左右,在給定轉(zhuǎn)速階躍變化時(shí),只是在一瞬間出現(xiàn)了大約20 r/min的估計(jì)偏差,在轉(zhuǎn)速升高過程中轉(zhuǎn)速估計(jì)偏差在10 r/min以內(nèi)。圖10(b)為實(shí)際轉(zhuǎn)子位置、估計(jì)轉(zhuǎn)子位置和轉(zhuǎn)子位置估計(jì)偏差波形,由圖可知,穩(wěn)態(tài)時(shí)轉(zhuǎn)子位置平均估計(jì)偏差約為0.015 rad,波動(dòng)幅度為0.025 rad左右,在給定轉(zhuǎn)速階躍變化時(shí)最大轉(zhuǎn)子位置估計(jì)偏差不超過0.07 rad,通過增加鎖相環(huán)中積分系數(shù)可以使該值更小。圖10(c)為轉(zhuǎn)矩電流曲線,由圖可知,在穩(wěn)態(tài)時(shí)由于帶15 N·m左右的負(fù)載,轉(zhuǎn)矩電流恒為40 A左右,當(dāng)參考轉(zhuǎn)速階躍變化時(shí),轉(zhuǎn)矩電流快速增加至限幅值50 A附近,使轉(zhuǎn)速升高,當(dāng)轉(zhuǎn)速升至目標(biāo)值后,轉(zhuǎn)矩電流減小至40 A左右。
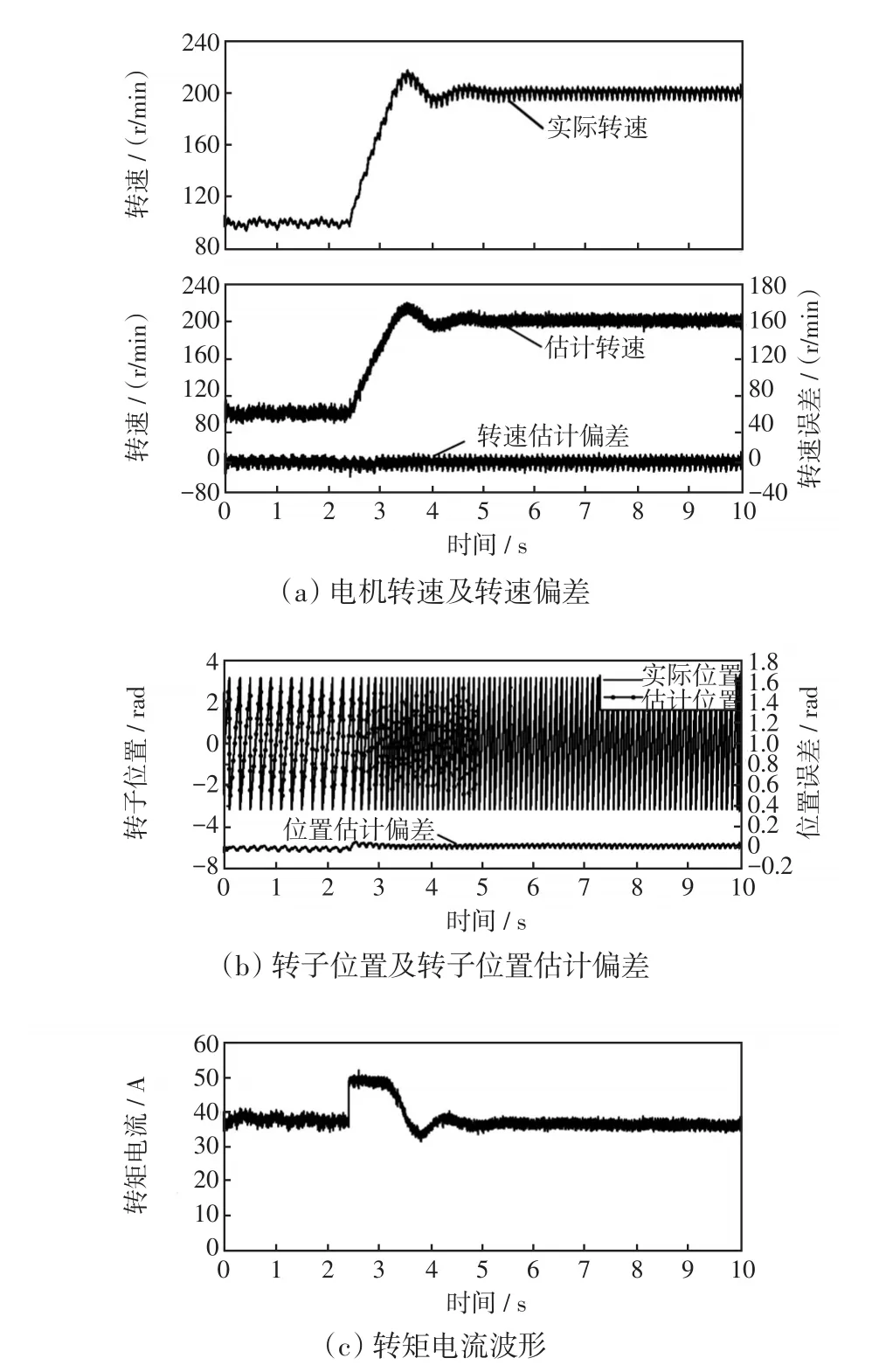
圖10 額定負(fù)載下轉(zhuǎn)速階躍實(shí)驗(yàn)結(jié)果Fig.10 Results of speed step experiment under rated load
為了驗(yàn)證該方法在電機(jī)運(yùn)行于額定工況下的轉(zhuǎn)子位置估計(jì)效果,使電機(jī)運(yùn)行在1 000 r/min,帶載15 N·m的工況下進(jìn)行實(shí)驗(yàn)。電機(jī)運(yùn)行在額定狀態(tài)下的轉(zhuǎn)子位置及轉(zhuǎn)速估計(jì)偏差如圖11所示。由圖11可知,估計(jì)的轉(zhuǎn)子位置能夠很好地跟蹤實(shí)際值,并且轉(zhuǎn)子位置估計(jì)偏差很小,平均估計(jì)偏差約為0.02 rad,最大轉(zhuǎn)子位置估計(jì)偏差為0.06 rad,轉(zhuǎn)速估計(jì)偏差在0 r/min附近波動(dòng),最大轉(zhuǎn)速估計(jì)偏差為10 r/min,轉(zhuǎn)速估計(jì)偏差率不超過1%,能夠滿足工程要求。
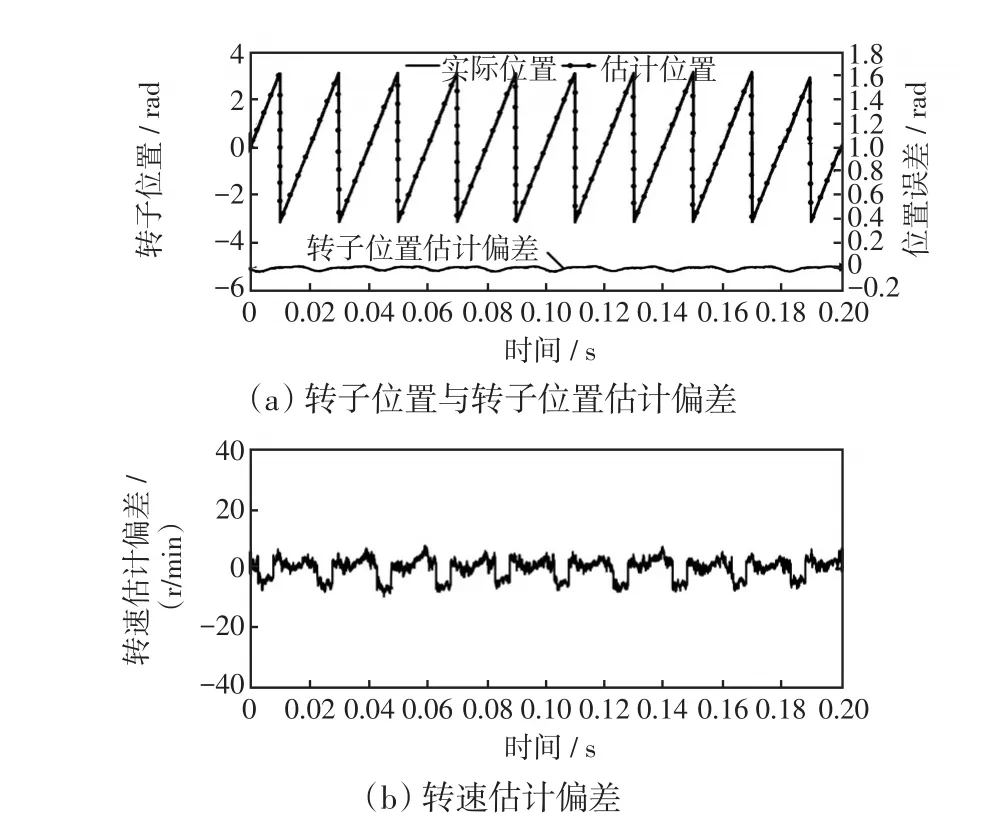
圖11 電機(jī)運(yùn)行在額定負(fù)載、額定轉(zhuǎn)速下的轉(zhuǎn)子位置及轉(zhuǎn)速估計(jì)實(shí)驗(yàn)效果Fig.11 Experimental results of rotor position and speed estimation when the motor runs under rated load and at rated speed
由于本文方案對(duì)逆變器非線性進(jìn)行了補(bǔ)償且具備對(duì)積分漂移的抑制能力,故可以在低速時(shí)獲得更好的特性。為了對(duì)此進(jìn)行驗(yàn)證,令電機(jī)帶載15 N·m、運(yùn)行在30 r/min,轉(zhuǎn)子位置及轉(zhuǎn)速估計(jì)效果如圖12所示,轉(zhuǎn)子位置估計(jì)值仍能跟蹤轉(zhuǎn)子位置實(shí)際值,轉(zhuǎn)子位置估計(jì)偏差在0 rad附近波動(dòng),最大估計(jì)偏差為0.06 rad;轉(zhuǎn)速估計(jì)偏差在0 r/min波動(dòng),大部分時(shí)間轉(zhuǎn)速偏差在10 r/min左右,控制效果并未出現(xiàn)明顯改變。
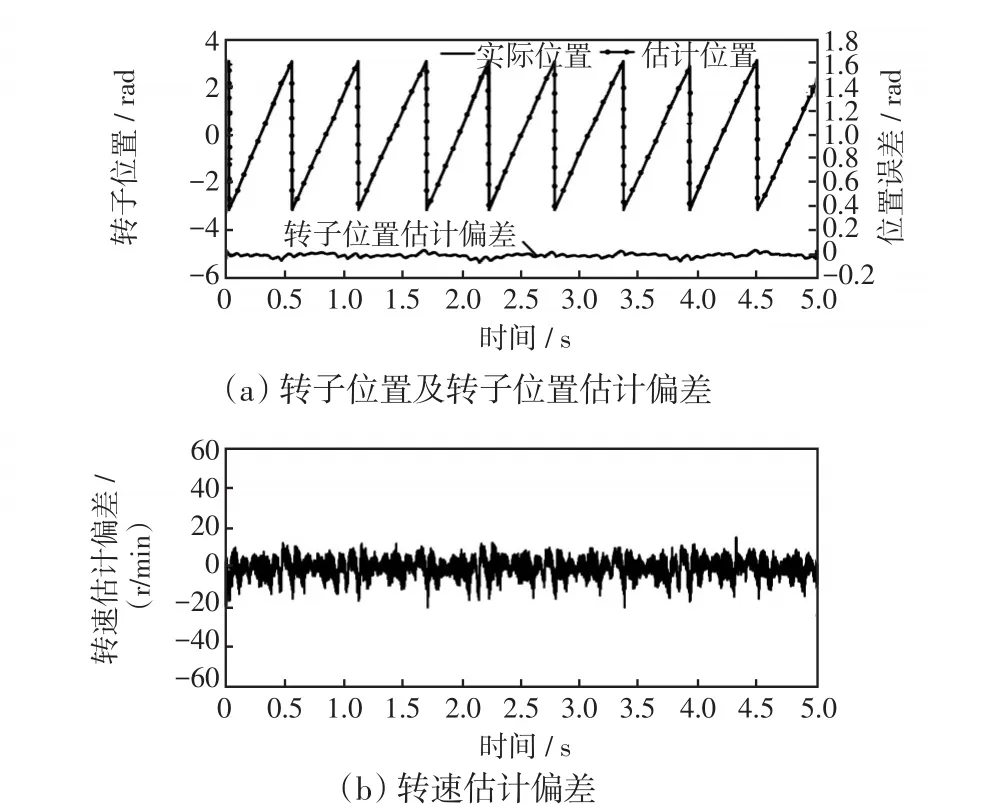
圖12 電機(jī)運(yùn)行在30 r/min帶額定負(fù)載工況下的實(shí)驗(yàn)結(jié)果Fig.12 Experimental results when the motor runs at 30 r/min and under rated load
綜上所述,本文所提出的無位置傳感器控制系統(tǒng)設(shè)計(jì)方案具有較好的轉(zhuǎn)子位置及轉(zhuǎn)速穩(wěn)態(tài)和動(dòng)態(tài)估計(jì)性能,實(shí)驗(yàn)結(jié)果也顯示了其可行性和有效性。
5 結(jié)語
本文給出一種IPMSM無位置傳感器系統(tǒng)設(shè)計(jì)方案,由轉(zhuǎn)子永磁磁鏈角的估計(jì)值和同步坐標(biāo)系下定子磁鏈的代數(shù)模型得到定子磁鏈估計(jì)值,經(jīng)旋轉(zhuǎn)變換后與靜止坐標(biāo)系下由定子電壓、電流積分模型得到的定子磁鏈進(jìn)行比較形成反饋閉環(huán)來抑制積分漂移,并利用兩者叉積經(jīng)鎖相環(huán)得到IPMSM轉(zhuǎn)子位置和轉(zhuǎn)速估計(jì)值。與已有的EEMF狀態(tài)觀測(cè)器方法相比較,本文所提方法簡(jiǎn)單且動(dòng)態(tài)和靜態(tài)估計(jì)性能更好。為了提高其低速控制性能,對(duì)逆變器非線性進(jìn)行了補(bǔ)償。最后通過仿真和實(shí)驗(yàn)實(shí)現(xiàn)了所提出的IPMSM無位置傳感器控制系統(tǒng)方案,驗(yàn)證了所提出方法是可行和有效的。