兩棲裝甲車駕駛模擬器視景系統設計與實現
2021-10-28 07:51:26謝云開孟祥輝張燕燕劉青峰李江江
軟件導刊 2021年10期
謝云開,孟祥輝,張燕燕,劉青峰,嚴 亮,李江江
(1.海軍研究院特種勤務研究所,北京 100072;2.哈爾濱工業大學 機電工程學院,黑龍江哈爾濱 150001)
0 引言
近年來,兩棲裝甲裝備的科技含量越來越高,對駕駛人員的操作技能要求更加嚴格,訓練成本也越發昂貴。為了提高訓練效率,減少裝備損耗,兩棲裝甲車駕駛模擬器成為有效的訓練裝備。裝甲車輛駕駛模擬器通過構建虛擬的駕駛環境,仿真在各種天氣條件、路況、海況下戰車的行駛狀態,使駕駛員能夠基本掌握車輛的各種操作技能,為實車駕駛提供保障。為此,世界各國都非常重視裝甲裝備模擬訓練,為裝甲車輛的操作人員裝備相應的模擬訓練系統提供保障[1-2]。
視景系統是兩棲裝甲車模擬器的重要組成部分,用來為駕駛員營造一個真實的虛擬工作場景,提供訓練所需的視覺信息。視景系統直接影響駕駛仿真的逼真性和訓練效果。許多學者和工程技術人員針對視景系統的實現方法和實現效果展開了研究。其中,Vega Prime 以其高性能和高效率成為有效的實時視景仿真平臺[3-6]。為此,本文選用Vega Prime 作為兩棲裝甲車駕駛模擬器視景系統的仿真平臺,研究其實現方式。
對于裝甲車輛駕駛模擬器,文獻[7-10]實現了其視景系統開發,側重于陸上駕駛環境的視景仿真。與普通裝甲車輛相比,兩棲裝甲車輛駕駛模擬器需要同時滿足水陸兩種駕駛狀態的需求,要能夠真實地反映裝甲車輛在各級海況下水上駕駛以及各種地形條件下陸地駕駛的運動狀態。為此,水動力學仿真和高效碰撞檢測成為系統實現的關鍵技術。對于碰撞檢測,基于包圍盒的檢測方法較為有效[11-13],而兩棲裝甲車輛仿真計算負載較大,實時的碰撞檢測方法有待進一步研究。此外,針對兩棲裝甲車輛的水動力學仿真直接關系到系統仿真的真實性,而相關研究較少。
鑒于此,本文基于Vega Prime,設計與實現了兩棲裝甲車駕駛模擬器視景系統,并針對兩棲裝甲裝備的特點,研究了水動力學仿真和高效碰撞檢測等關鍵技術,有效提升了視景仿真的逼真度。
1 視景系統設計
1.1 系統架構
視景系統由視景生成系統和視景顯示系統兩部分組成。視景生成系統負責完成所需場景圖像的實時生成和渲染工作,它包括圖形工作站(成像計算機)、視景數據庫和視景仿真軟件,決定著視景系統顯示圖像內容的豐富程度、逼真度、清晰度等技術指標。視景顯示系統用來將視頻信號轉化成能夠被人眼感知的光學影像,該部分常使用一些必要的光學設備來增加影響的品質和逼真度。視場角、亮度、對比度等技術指標主要由該部分系統決定,它還直接影響著系統的縱深感和沉浸感[1]。整個系統框架結構如圖1 所示。
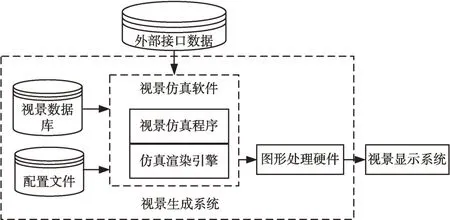
Fig.1 Frame structure of visual system圖1 視景系統框架結構
其中,視景顯示系統主要通過硬件實現,硬件的顯示方式和性能指標根據具體需求確定。視景生成系統分為硬件與軟件兩部分,軟件部分包括視景數據庫和視景仿真軟件,是系統開發的重點。圖形工作站是軟件部分的載體及開發和運行的硬件環境,它配合軟件部分共同完成場景的實時渲染工作。
系統運行時,視景生成系統接收來自仿真計算機的位姿數據和來自指揮控制臺的控制指令,遍歷視景數據庫,查詢并選擇所需的模型數據,或由仿真軟件直接生成、解算仿真模型,然后對模型數據進行控制和處理,進而交由圖形硬件處理數據,最終生成視頻信號并輸出給視景顯示系統[2-3]。
1.2 系統功能
在駕駛員的視點位置,生成與模擬機運動相應的動態場景,完成相關的視覺效果模擬,并將相應的圖像送往顯示設備,為駕駛員提供高沉浸感的視覺信息。同時,視景系統與實時仿真計算機系統進行相關參數的數據交互,保證運動系統與視景系統同步。
根據兩棲裝甲車自身特點及項目需求,視景系統主要功能如下:①實時顯示與模擬機位姿和場景設置相關的不同駕駛環境下的真實三維場景;②重點實現海上駕駛適應各級海況、陸上駕駛匹配各種地形的高逼真視景仿真;③實現天氣效果模擬,具有白天、黃昏和夜間等工作模式,提供云霧、能見度、降水等特殊效果,可實現能見度等的數量特性變化;④能夠響應指揮控制臺的指令設置。
1.3 視景顯示分系統
對于駕駛員閉艙視景顯示分系統,由于其視場角需求較小,擬采用液晶顯示器對視景系統生成的虛擬場景進行顯示,實現原理如圖2 所示。顯示系統和觀察窗通過錐形密閉框架連接,形成具有一定景深的顯示系統。

Fig.2 Display system scheme圖2 顯示系統原理
閉艙駕駛視景根據觀察窗的數量采用三套顯示系統加以實現,視景系統的硬件結構如圖3 所示,其采用一臺視景計算機和三通道圖形卡實現,視景系統和其它模擬機分系統共同連接在以太網上實現信息交互。

Fig.3 Display system topology structure圖3 顯示系統拓撲結構
1.4 視景生成分系統
視景生成分系統主要用于產生模擬所需要的各種場景,完成系統的功能要求,涉及視景數據庫建模和視景仿真程序開發兩個方面。視景數據庫是對虛擬環境的描述,是以某種形式數據結構存儲的環境數據信息。
場地模型的建模流程如圖4 所示。首先根據需求,確定模型的位置、范圍、屬性等,完成模型規劃工作;然后根據模型規劃確定并獲取所需的原始數據源,并對其進行處理和優化以滿足建模要求。將原始數據源導入數據庫建模工具,完成場地模型的建立與合成。建立后的視景數據庫應當導入視景仿真環境以驗證其是否能夠達到系統規定的功能和性能要求,若未達到則再次利用建模工具對模型進行修正至滿足要求為止。

Fig.4 Site model modeling flow圖4 場地模型建模流程
基于Vega Prime 的仿真應用程序原理結構如圖5 所示。仿真應用程序用來完成實時場景的生成和管理,響應實時仿真計算機傳遞的車體位姿信息、車輛操控信息等,依據視景數據庫,自動生成與模擬機運動相對應的動態視景,并將相關參數反饋給對應的子系統[4]。程序的具體作用包括虛擬場景構建、場景驅動與渲染、模型動態調度和管理、碰撞檢測及其響應、維護系統性能的加速算法實現等。仿真驅動程序應該能夠高速逼真地再現仿真環境,實時響應交互操作。

Fig.5 Principle structure of simulation application based on Vega Prime圖5 基于Vega Prime 的仿真應用程序原理結構
為保證開發的速度、質量和可維護性,視景仿真程序借助于商業軟件開發平臺進行開發。具體開發方法取決于特定的平臺,該系統程序將基于Vega Prime 完成。MPI的Vega Prime 是世界上領先的應用于實時視景仿真、虛擬現實等領域的軟件環境,用于渲染戰場仿真、訓練模擬器等的視景數據庫。它提供跨平臺、可擴展的開發環境,可用于高效的視景仿真應用開發,包括Lynx Prime 圖形用戶界面配置工具和Vega Prime 的基礎VSG(Vega Scene Graph,底層為OpenGL)高級跨平臺場景圖形API[5-6]。Vega Prime 具有許多特性,包括自動的異步數據庫調用、碰撞檢測與處理、對延時更新的控制和代碼的自動生成、可擴展可定制的文件加載機制、環境效果模擬等。配合其增強模塊可以實現應用的特定功能。
2 關鍵技術與系統實現
2.1 水動力學仿真建模
兩棲車輛在海上行駛時,車體與海水之間的相互作用是車輛在海面漂浮、搖擺的主要因素,要仿真車輛在各種海況下的運動,必須掌握車輛水動力學的建模仿真技術。車輛水動力建模的準確性將直接影響到整個模擬器的逼真度,為此在建立車輛的水動力學模型時,需要對模型的建立方法、建立措施進行必要研究,同時根據實車設計參數采用CFD 軟件進行仿真,實現二者互補,保證模型建立的準確性和正確性。
(1)車輛水上運動受力分析。車輛在水中行駛時,所受外力如圖6 所示,本文重點關注水動力和波浪力。

Fig.6 External force taken by the vehicle on water圖6 車輛水上運動所受外力
(2)水動力(滑行平板理論)。由于兩棲車輛在海上行駛時,首尾均有滑板進行車輛運動控制,因此運用滑行理論,建立平板或微彎曲板在流體中滑行時的動力學模型,進而實現滑板操作對車輛運動狀態的仿真,使得車輛水動力學模型更加逼真,更加貼近實車的操作規律。
滑行理論:研究平板或微彎曲板在流體中滑行時的受力情況,進而解決各種實際滑行問題。有限滑行平板的滑行狀態如圖7 所示。

Fig.7 Sliding state of finite plate圖7 有限平板滑行狀態
其中,l表示平板長度;B 表示平板寬度;α表示沖角,即來流相對于滑行平板的運動角度;v0表示平板運動速度。
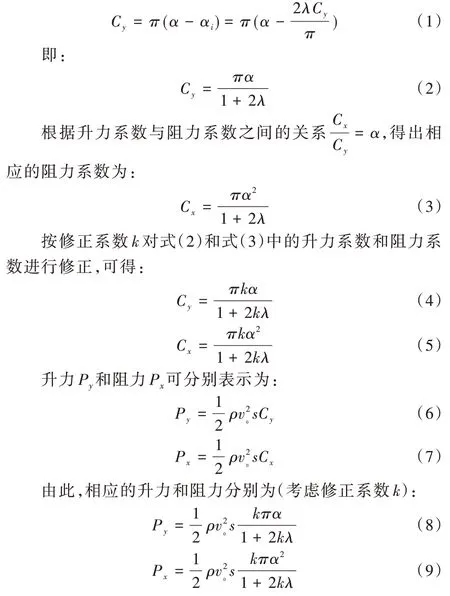
有限滑行平板沿寬度方向垂直于滑行平板任意截留的流動狀態不完全相同,沿寬度方向平板兩端的水流直接與大氣接觸,壓力等于大氣壓力,而平板的底部壓力大于大氣壓力,由此形成沿板寬方向的橫向擾流。橫向擾流導致平板底部壓力損失,相當于有效沖角α減小,所減小的角稱為下洗角αi。橫向擾流的大小與浸濕長寬比λ=l/B有密切關系。浸濕長寬比越大,對橫向擾流的影響越大,則下洗角αi越大。由于滑行平板下表面的水流流動和受力狀態與薄翼下表面極為相似,受平板有限寬的影響,可采用機翼理論:對于無限翼展的平板薄機翼的升力系數Cyw=2πα,則有限翼展的下洗角為表示機翼展弦比。有限滑板的升力系數為Cy=πα,有限滑行平板的展弦比為下洗角為得出有限滑行平板升力系數為:
(3)波浪力和力矩計算。海浪基本分為兩種:涌浪和風浪。由海浪模型可得到對浪高ξ 的描述。依據波浪理論得到相應的數學模型:
平面行進波(涌浪):


計算波浪力和力矩需要將海浪模型轉換到車體坐標系中進行描述,由此給出車輛在海浪中的航行狀態如圖8所示。

Fig.8 State of vehicle sailing in waves圖8 波浪中航行車輛狀態
其中,c表示波速,即波浪傳播速度γ表示航速v0與波浪傳播速度c方向的夾角,順浪γ=0°,逆浪γ=180°,斜浪γ=30°,橫浪γ=90°;AB 表示波浪傳播的波峰位置;v0表示車輛航速;λ表示波長。
運動坐標系中對海浪的描述:
ce表示波峰相對于車輛的傳播速度,即波浪在車體坐標系中的運動速度,成為波浪的表觀傳播速度:

Te表示在車體坐標系中觀察到的作用于車輛上的波周期,稱為遭遇周期,與波浪的自然周期T相對應:

k表示波數,對于深水重力波,由海浪線性波動理論的深水彌散關系可得:

ω表示圓頻率,ωe表示波的遭遇頻率,與波浪的自然頻率ω相對應,有:

可得車體坐標系下,涌浪遭遇波面升高?e(t)和遭遇波傾角αe(t)仿真計算模型為:

隨機海浪遭遇波面升高?e(t)和遭遇頻率αe(t)的時域模型為:

根據仿真模型可得到各自由度的波浪力和力矩為:

同理可得到其他自由度的力和力矩。
2.2 地形匹配與碰撞檢測技術
為了實現車輛在陸地上的駕駛仿真,必須解決實時碰撞檢測和地形匹配問題。地形匹配即保持運動實體與地面的相對位置關系正確,是一類特殊的碰撞檢測和碰撞處理問題。運載實體(如汽車、裝甲車等)在運動時,其姿態應隨地形變化而高低起伏和左右傾斜,進而始終與地面保持合乎常理的相對位置關系。地形匹配問題主要是解決如何快速、準確地求解出運載實體和地面接觸點的問題,以避免出現部分陷于地下或懸于空中等違背自然規律的現象,這屬于碰撞檢測的范疇[11-12]。為保證檢測效率,本文采用基于射線的碰撞檢測方法,即使用一組射線近似表示運動的物體,如圖9 所示。
通過射線與虛擬場景的相交狀態進行檢測判斷,當相交檢測距離為0 時,則運載實體在地面上。如果該距離大于0,實體與虛擬場景沒有接觸;反之,當距離小于0,陷入環境中。碰撞處理依據該距離值完成,如果距離大于0,則使實體向下運動;反之,使實體向上運動。依此即可實現地形匹配。

Fig.9 Ray based collision detection圖9 基于射線的碰撞檢測
此外,為運載實體與虛擬環境其它部分的碰撞檢測,需要對相關的幾何模型進行相交性測試。為提高檢測效率,采用基于包圍盒的檢測方法[13],即將運載實體和虛擬環境簡化為簡單幾何體形式。為了進一步提高檢測效率,采用層次碰撞檢測進行加速,即使用包圍體為每個模型創建一個層次表示形式。層次構建采用自上而下的方法,首先找到模型所有圖元的包圍體,作為樹節點,然后分割成k(或者更小)個部分,即為k叉樹的結構,如圖10 所示。該檢測算法采用遞歸調用的方式逐層檢測。

Fig.10 Hierarchical structure of bounding volume圖10 包圍體層次結構
3 視景系統實驗結果
視景系統硬件配置如下:HPxw9400 系列,四核酷睿英特爾5420 至強處理器;12MB 二級高速緩存;300GB(15 000 rpm)SAS 硬盤驅動器;NVIDIA Quadro FX 系列顯卡,2G DDR-2 667MHz ECC 全緩沖內存。
視景系統實現效果如圖11—圖13 所示。圖11 為駕駛過程中通過駕駛員觀察窗觀察到的視覺效果,駕駛場景為海灘,駕駛環境為陸地駕駛,圖12—圖13 為水上駕駛過程中觀察到的虛擬場景效果。為更清晰地呈現水上駕駛場景,可將觀察視點由駕駛員觀察窗移至裝甲車輛體外。可以看到,視景系統能夠真實模擬裝甲車輛水上駕駛的運動狀態,包括海浪和行進過程中的浪花特效。視景系統能夠滿足裝甲車輛行進過程中的虛擬視覺環境仿真需求,并且具有較好的真實感和沉浸感。

Fig.11 Observation effect of observation window圖11 觀察窗觀察效果

Fig.12 Ocean simulation rendering圖12 海洋模擬效果

Fig.13 Carrier entity in the process of moving圖13 行進過程中的運載實體
4 結語
本文針對兩棲裝甲車輛駕駛模擬器,基于Vega Prime實現了其視景系統開發。針對兩棲車輛的駕駛特點,研究了水動力學仿真和高效碰撞檢測等關鍵技術,解決了兩棲裝甲車輛適用各級海況、陸上匹配各種地形等多樣性駕駛需求帶來的仿真難題,有效提升了其視景仿真的逼真度。該系統已應用于實際的駕駛模擬設備,對相關模擬器視景系統開發具有借鑒價值。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19