基于BP和PGA算法的斜視SAR成像方法
2021-10-27 05:57:04閆夢(mèng)圓高安琪薛晨孫兵李景文
關(guān)鍵詞:方法
閆夢(mèng)圓,高安琪,薛晨,孫兵,李景文
(北京航空航天大學(xué)電子信息工程學(xué)院北京 100083)
1 引言
在合成孔徑雷達(dá)(Synthetic Aperture Radar,SAR)成像中,BP 成像算法作為一種時(shí)域算法,不需要頻域的近似,能夠精確成像,并且能夠適用于雷達(dá)的各種運(yùn)動(dòng)軌跡,普適性強(qiáng)。在大斜視情況下,SAR 的距離方位耦合較為嚴(yán)重,目標(biāo)回波信號(hào)頻譜的數(shù)學(xué)表達(dá)復(fù)雜,其他頻域成像算法如距離多普勒(Range-Doppler,RD)算法[1]等,其成像結(jié)果的精確程度與回波信號(hào)的二維頻譜的精確程度密切相關(guān),在斜視情況下成像效果欠佳。而BP 算法作為時(shí)域成像算法,根據(jù)雷達(dá)到像素點(diǎn)之間的距離計(jì)算時(shí)延,將回波數(shù)據(jù)反向映射到成像區(qū)域的每個(gè)像素,并把所有像素點(diǎn)的回波進(jìn)行相干疊加來(lái)成像。避免了距離方位耦合的問題[2]。因此對(duì)于斜視SAR 成像情況,本文使用BP 算法進(jìn)行處理。
但是由于目標(biāo)的運(yùn)動(dòng)和平臺(tái)運(yùn)動(dòng)誤差,會(huì)產(chǎn)生回波多普勒信號(hào)相位誤差,導(dǎo)致BP 成像聚焦困難,需要進(jìn)行相位補(bǔ)償。隨著SAR成像分辨率的提高,合成孔徑長(zhǎng)度增加,對(duì)回波相位誤差的補(bǔ)償提出了更高的要求[3]。雖然依靠慣性導(dǎo)航運(yùn)動(dòng)補(bǔ)償系統(tǒng)直接測(cè)量雷達(dá)平臺(tái)加速度,獲得載機(jī)平臺(tái)的位置,能夠補(bǔ)償一定的相位誤差,但是這種方式會(huì)產(chǎn)生積累相位誤差,不能夠完全補(bǔ)償相位誤差[4]。能夠精確估計(jì)出SAR 天線相位中心的運(yùn)動(dòng)誤差,在成像過(guò)程中進(jìn)行運(yùn)動(dòng)補(bǔ)償,是實(shí)現(xiàn)高分辨率SAR成像的難點(diǎn)[5]。
成像的散焦大部分來(lái)自于回波信號(hào)中的二次相位誤差,能夠估計(jì)并補(bǔ)償二次相位誤差能夠有效的解決方位向散焦問題,自聚焦處理是常用的方式。傳統(tǒng)的自聚焦方法如子孔徑相關(guān)法(Map Drift,MD)[6],相位差算法(Phase Difference,PD)[7]、反射率偏移法(Reflectivity Displacement Method,RDM)[8]等,都只能估計(jì)低階相位誤差,而相位梯度自聚焦算法(Phase Gradient Autofocus,PGA)作為非參數(shù)模型算法,不需要確定相位誤差的階數(shù),因此能夠同時(shí)補(bǔ)償?shù)碗A、高階以及隨機(jī)誤差[9],并能夠較好的用于有強(qiáng)散射點(diǎn)雷達(dá)回波的運(yùn)動(dòng)誤差估計(jì)[10]。
在已有的PGA算法中,相位梯度估計(jì)都需要沿二維數(shù)據(jù)域的某一維度進(jìn)行估計(jì)[11],但是在斜視情況下的BP 算法成像中,目標(biāo)的擴(kuò)展函數(shù)方向與斜視角在地面的投影角度有關(guān),方位向不再是嚴(yán)格的正交方向。因此斜視情況下SAR 系統(tǒng)目標(biāo)自聚焦后成像質(zhì)量得不到明顯的提升。為了解決這一問題,本文提出了一種基于BP 算法點(diǎn)目標(biāo)擴(kuò)展函數(shù)二維不正交情況下的自聚焦方法。使斜視情況下機(jī)載SAR 的成像質(zhì)量得到顯著提升。
2 BP成像算法原理



BP 算法實(shí)際上是先確定圖像的網(wǎng)格大小和區(qū)域,然后按照時(shí)延找到它在原始回波數(shù)據(jù)中的對(duì)應(yīng)位置,并采用插值的方法來(lái)獲取回波值,最后實(shí)現(xiàn)針對(duì)所有像素點(diǎn)的疊加從而得到所需要的SAR 圖像。
具體來(lái)說(shuō),首先根據(jù)目標(biāo)成像區(qū)域場(chǎng)景大小建立地面成像網(wǎng)格。根據(jù)雷達(dá)軌跡,在地面沿方向建立成像網(wǎng)格,網(wǎng)格像素間隔根據(jù)實(shí)際分辨率指標(biāo)設(shè)定。
3 改進(jìn)的PGA自聚焦方法
實(shí)際情況中,由于目標(biāo)的運(yùn)動(dòng),會(huì)導(dǎo)致回波多普勒信號(hào)存在相位誤差,造成圖像的散焦,因此在BP 成像后進(jìn)行PGA處理以補(bǔ)償相位誤差。
但是在大斜視SAR成像情況下,最終目標(biāo)的擴(kuò)展函數(shù)方向受到斜視角的影響,傳統(tǒng)的PGA算法難以得到效果良好的自聚焦結(jié)果。究其原因,主要是因?yàn)槌上窬W(wǎng)格的方向沿東-北方向劃分,在斜視情況下,會(huì)造成點(diǎn)目標(biāo)擴(kuò)展函數(shù)二維不正交,而傳統(tǒng)PGA沿著二維數(shù)據(jù)域中的某一維度進(jìn)行估計(jì),方位向水平或是垂直時(shí),才能得到較為準(zhǔn)確的估計(jì)結(jié)果。因此無(wú)法準(zhǔn)確估計(jì)相位誤差,導(dǎo)致自聚焦失效。
本文提出的自聚焦方法過(guò)程流程圖如圖2所示。
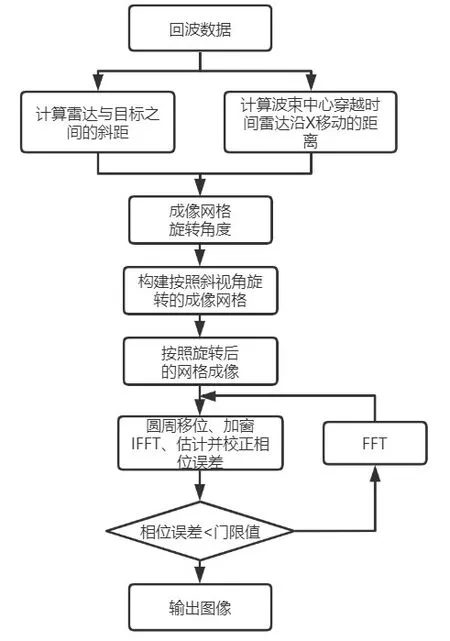
圖2 改進(jìn)的自聚焦算法流程
本方法針對(duì)斜視情況下相位梯度自聚焦失效的問題,提出了一種新的確定成像網(wǎng)格方向以及劃分的方法,解決斜視情況下相位梯度自聚焦失效的問題。
首先根據(jù)大斜視機(jī)載SAR成像幾何模型,繪制出斜視情況下,合成孔徑中心時(shí)刻SAR觀測(cè)目標(biāo)的地面投影圖,如圖3所示。
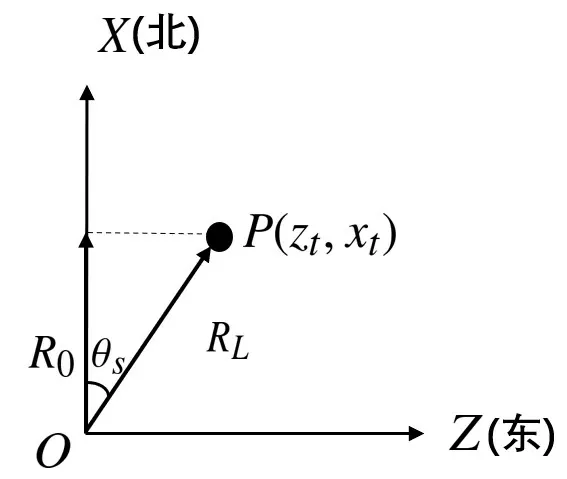
圖3 地面投影圖

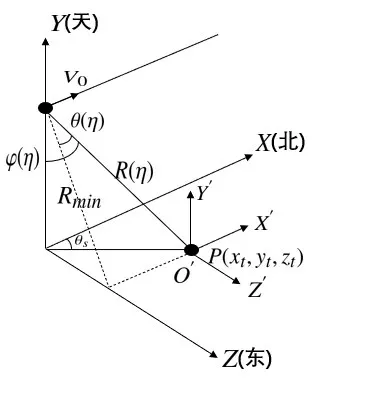
圖1 大斜視機(jī)載SAR成像幾何模型


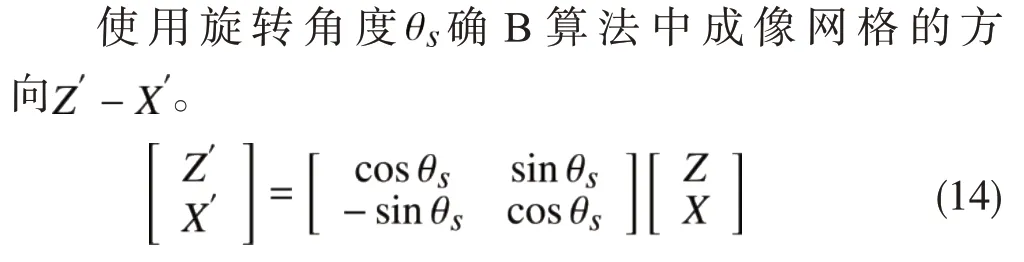

圖4 網(wǎng)格方向選取對(duì)比
按照改進(jìn)方向劃分網(wǎng)格進(jìn)行成像,能夠?qū)⒋笮币暻闆r下BP 成像中方位向的傾斜校正為嚴(yán)格正交方向,再進(jìn)行相位梯度自聚焦處理。
對(duì)成像結(jié)果逐距離門找到強(qiáng)散射點(diǎn),沿方位向進(jìn)行圓周移動(dòng)操作,將各距離門內(nèi)的強(qiáng)點(diǎn)目標(biāo)移動(dòng)到各自方位向場(chǎng)景中心,可以將目標(biāo)位置引起的多普勒頻率偏移去除。
對(duì)圓周移動(dòng)后的數(shù)據(jù)加窗,保留用于估計(jì)相位誤差的目標(biāo)主要信息,濾除對(duì)相位誤差沒有貢獻(xiàn)的部分,能夠保證相位誤差估計(jì)過(guò)程中輸入數(shù)據(jù)具有較高的信噪比。
記圖像的方位向點(diǎn)為,距離向點(diǎn)為。把中心移位和加窗后的圖像數(shù)據(jù)經(jīng)逆傅里葉變換回到距離壓縮相位歷程,進(jìn)行相位誤差的估計(jì)。在距離壓縮相位歷程,數(shù)據(jù)表示為:


在實(shí)際的操作中,利用下式進(jìn)行相位差的估計(jì):

根據(jù)式(18)得到所有相鄰方位向上的相位誤差,通過(guò)積分計(jì)算出整個(gè)孔徑上的相位誤差。

隨后,補(bǔ)償相位誤差,并進(jìn)行迭代,以逐漸提高圖像質(zhì)量,當(dāng)相位誤差小于可以認(rèn)為相位誤差基本被消除,得到聚焦后的SAR圖像。
4 仿真驗(yàn)證
下面對(duì)本文提出的機(jī)載SAR 點(diǎn)目標(biāo)擴(kuò)展函數(shù)二維不正交的自聚焦方法進(jìn)行仿真驗(yàn)證。
建立艦船目標(biāo)模型如圖5 所示。艦船模型長(zhǎng)60m,寬30m,高20m,散射點(diǎn)抽樣間隔為5m,共37個(gè)散射點(diǎn)組成,艦船目標(biāo)的轉(zhuǎn)動(dòng)運(yùn)動(dòng)為分別繞三個(gè)軸轉(zhuǎn)動(dòng)的俯仰、偏航、滾動(dòng)。仿真中不考慮船的直線運(yùn)動(dòng),主要利用船自身的旋轉(zhuǎn)運(yùn)動(dòng)形成的轉(zhuǎn)角成像。本次仿真中僅考慮艦船的晃動(dòng)對(duì)成像的影響。

圖5 仿真艦船模型
首先對(duì)艦船目標(biāo)中的單點(diǎn)目標(biāo)進(jìn)行仿真和評(píng)估,在機(jī)載大斜視情況下,設(shè)置雷達(dá)平臺(tái)斜視角為35°,主要仿真參數(shù)如表1所示。
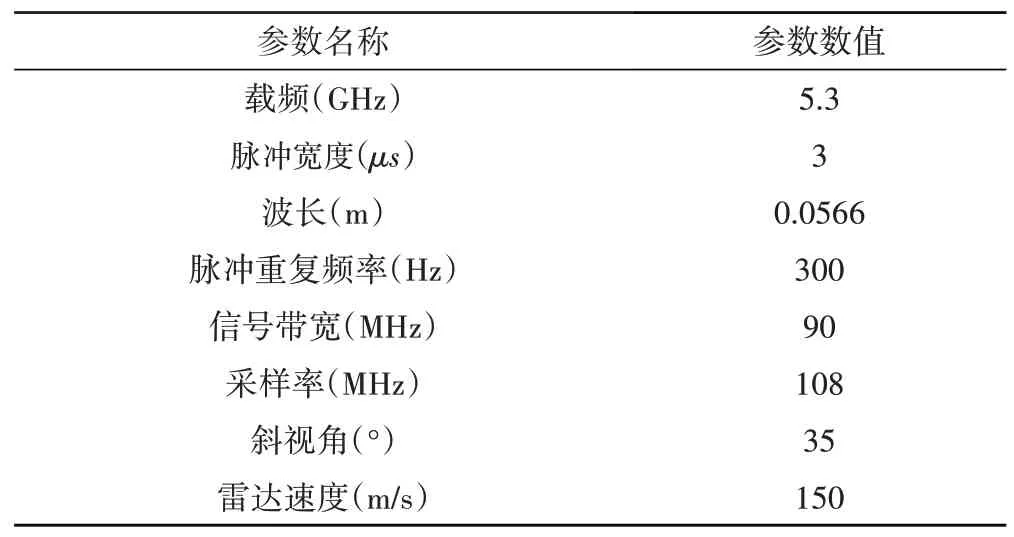
表1 主要仿真參數(shù)
分別采用兩種方法進(jìn)行仿真。
方法一:回波數(shù)據(jù)在經(jīng)過(guò)BP 處理后,使用傳統(tǒng)PGA進(jìn)行運(yùn)動(dòng)補(bǔ)償,不進(jìn)行坐標(biāo)轉(zhuǎn)換。
方法二:使用本文提出的算法,根據(jù)斜視角確定成像網(wǎng)格方向,使點(diǎn)目標(biāo)方位旁瓣與成像網(wǎng)格中的橫向方向正交,再逐距離門估計(jì)二次誤差相位進(jìn)行誤差補(bǔ)償。兩種方法的仿真結(jié)果如圖6、圖7、圖8 和圖9所示。
方法一仿真結(jié)果可以看出,BP 成像后,如圖6 所示,目標(biāo)的方位旁瓣嚴(yán)重傾斜,方位向存在嚴(yán)重散焦,經(jīng)過(guò)PGA 處理后,如圖7 所示,可以看出成像結(jié)果沒有得到明顯改善。

圖6 方法一BP成像結(jié)果

圖7 方法一PGA結(jié)果
方法二處理結(jié)果可以看出,在BP 成像后,經(jīng)過(guò)坐標(biāo)轉(zhuǎn)換,成像結(jié)果如圖8所示,目標(biāo)的方位旁瓣與圖像的縱向維度平行,存在嚴(yán)重散焦;經(jīng)過(guò)PGA處理后,成像結(jié)果如圖9所示,方位向散焦得到明顯改善,得到聚焦良好的點(diǎn)目標(biāo)圖像。
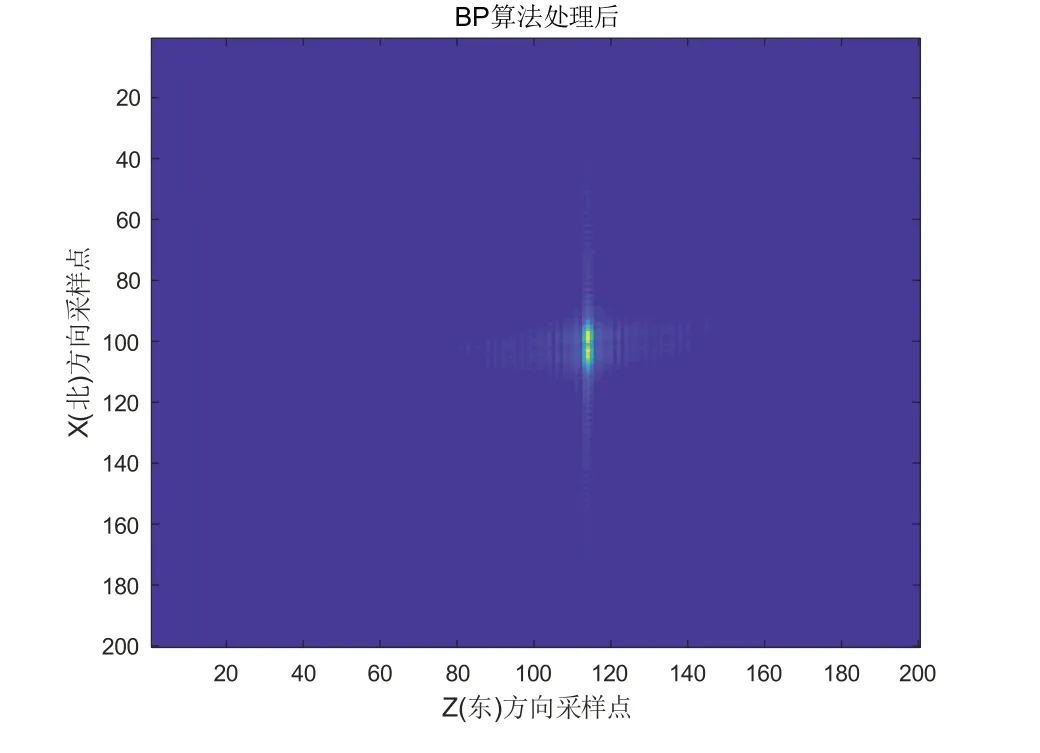
圖8 方法二BP結(jié)果
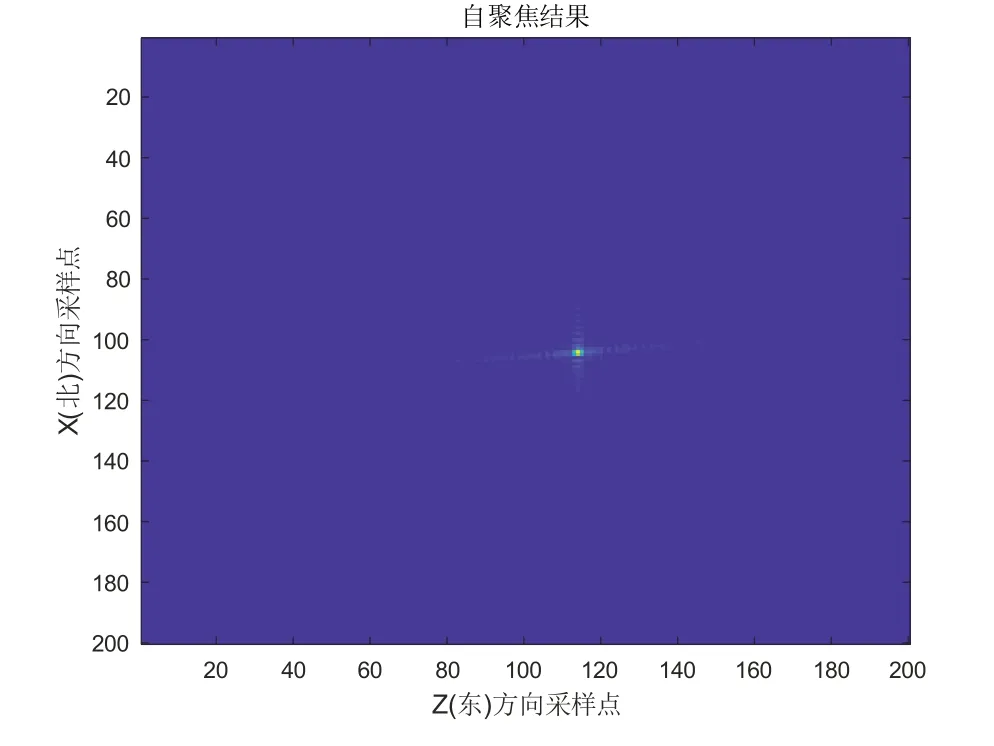
圖9 方法二PGA結(jié)果
對(duì)兩種方法得到的點(diǎn)目標(biāo)圖像進(jìn)行評(píng)估,對(duì)比單點(diǎn)目標(biāo)在兩種方法處理后的變化,分析點(diǎn)目標(biāo)的性能參數(shù),得到評(píng)估結(jié)果,方法一得到的點(diǎn)目標(biāo)評(píng)估剖面圖如圖10.a 所示,點(diǎn)目標(biāo)評(píng)估結(jié)果如圖11 所示;方法二處理得到的點(diǎn)目標(biāo)評(píng)估剖面圖如圖10.b所示,方法二得到的點(diǎn)目標(biāo)評(píng)估結(jié)果如圖12所示;二者的點(diǎn)目標(biāo)評(píng)價(jià)指標(biāo)如表2所示。
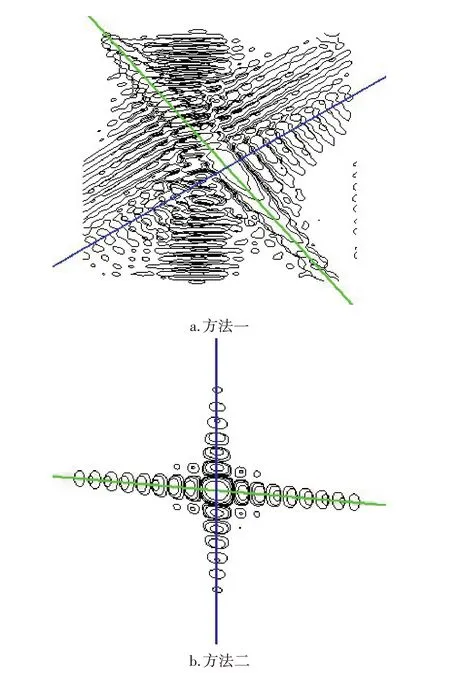
圖10 兩種方法點(diǎn)目標(biāo)評(píng)估剖面圖
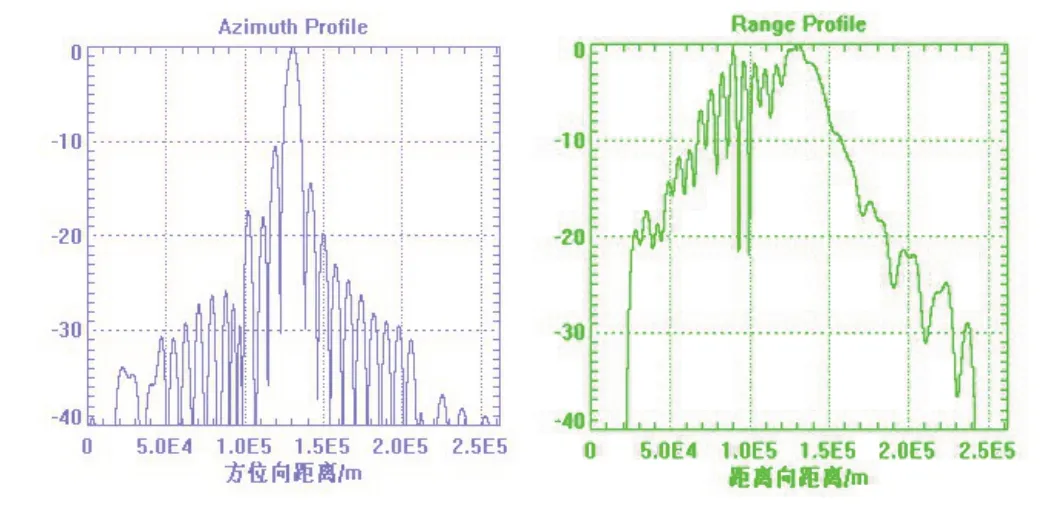
圖11 方法一PGA后點(diǎn)目標(biāo)評(píng)估結(jié)果
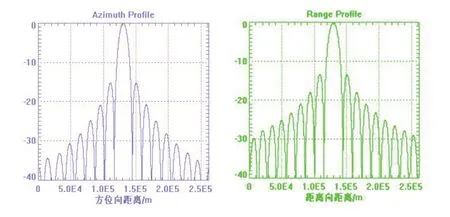
圖12 方法二PGA后點(diǎn)目標(biāo)評(píng)估結(jié)果

表2 點(diǎn)目標(biāo)評(píng)價(jià)指標(biāo)
由兩種方法的點(diǎn)目標(biāo)評(píng)估剖面圖可以看出,方法一最終的點(diǎn)目標(biāo)成像中,方位向仍然存在明顯的傾斜,方法二的點(diǎn)目標(biāo)成像中,方位旁瓣與圖像的縱向維度平行。
由兩種方法得到的點(diǎn)目標(biāo)的峰值旁瓣比(Peak Side Lobe Ratio,PSLR)和積分旁瓣比(Integral Side Lobe Ratio,ISLR)可知,方法一得到的方位向和距離向的峰值旁瓣比和積分旁瓣比的幅值都遠(yuǎn)遠(yuǎn)小于方法二,說(shuō)明經(jīng)過(guò)方法一的自聚焦之后,旁瓣能量仍然較大,沒有達(dá)到聚焦效果,而經(jīng)過(guò)方法二本文提出的自聚焦方法處理后,峰值旁瓣比和積分旁瓣比維持在較低水平,說(shuō)明聚焦效果良好。
對(duì)整個(gè)艦船目標(biāo)進(jìn)行仿真,使用本文提出的改進(jìn)后的PGA算法進(jìn)行自聚焦。在艦船模型中,取三個(gè)點(diǎn)設(shè)為強(qiáng)點(diǎn),便于觀察。BP 成像后得到結(jié)果如圖13 所示,經(jīng)過(guò)自聚焦后得到的成像結(jié)果如圖14所示。
從圖13 和圖14 可以看出,經(jīng)過(guò)改進(jìn)的PGA 處理之后,艦船模型中三個(gè)強(qiáng)點(diǎn)目標(biāo)的方位向散焦得以改善,聚焦效果良好。

圖13 艦船BP成像結(jié)果

圖14 艦船PGA后結(jié)果
5 結(jié)論
本文介紹了一種適用于斜視情況下由于BP 算法成像導(dǎo)致點(diǎn)目標(biāo)擴(kuò)展函數(shù)二維不正交時(shí)PGA 算法失效時(shí)的成像方法。通過(guò)斜視角確定成像網(wǎng)格方向,使點(diǎn)目標(biāo)方位向旁瓣與成像網(wǎng)格中的一維正交,進(jìn)行BP 成像。再逐距離門估計(jì)二次誤差相位進(jìn)行誤差補(bǔ)償,從而實(shí)現(xiàn)方位向聚焦,解決了斜視情況下BP 成像后,相位梯度自聚焦由于點(diǎn)目標(biāo)擴(kuò)展函數(shù)二維不正交導(dǎo)致的失效問題,是一種有效的斜視SAR成像方法。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(bào)(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
 中國(guó)傳媒大學(xué)學(xué)報(bào)(自然科學(xué)版)2021年3期
中國(guó)傳媒大學(xué)學(xué)報(bào)(自然科學(xué)版)2021年3期
- 中國(guó)傳媒大學(xué)學(xué)報(bào)(自然科學(xué)版)的其它文章
- 從奇點(diǎn)物理到黑洞
——質(zhì)疑黑洞探測(cè)及2020年Nobel物理獎(jiǎng) - 中科大成功舉辦計(jì)算社會(huì)科學(xué)論壇暨ICA年會(huì)中國(guó)分會(huì)場(chǎng)
- 應(yīng)用于車聯(lián)網(wǎng)的車載天線研究進(jìn)展綜述
- 人體動(dòng)作識(shí)別與評(píng)價(jià)綜述
- 基于語(yǔ)音分離的人工設(shè)計(jì)特征、參數(shù)化特征和可學(xué)習(xí)特征的比較
- 語(yǔ)音生態(tài)因素影響下的普通話語(yǔ)音發(fā)聲特點(diǎn)分析