基于新型數(shù)字電位器的伺服控制系統(tǒng)
2021-10-26 07:19:36吳建剛高玉文劉璐雅
機(jī)電產(chǎn)品開發(fā)與創(chuàng)新 2021年5期
吳建剛, 高玉文, 王 闊, 劉璐雅
(四川航天電子設(shè)備研究所, 四川 成都 610100)
0 引言
隨著精確制導(dǎo)技術(shù)不斷發(fā)展,導(dǎo)引頭技術(shù)越來越受到重視[1]。 雷達(dá)伺服系統(tǒng)是反艦導(dǎo)彈導(dǎo)引頭的重要組成部分,它對(duì)于發(fā)現(xiàn)目標(biāo)、跟蹤目標(biāo)以及精確測(cè)量目標(biāo)位置都起著重要作用,它的精度直接影響到反艦導(dǎo)彈的制導(dǎo)精度[2-3]。伺服系統(tǒng)的定位精度主要取決于角度傳感器的精度,目前導(dǎo)引頭伺服控制系統(tǒng)較多采用旋轉(zhuǎn)變壓器作為伺服系統(tǒng)的測(cè)角元器,測(cè)角信號(hào)經(jīng)旋變解調(diào)電路模塊解碼后得到角度信息,小尺寸旋轉(zhuǎn)變壓器精度從4′至12′不等,體積越小,精度越低,可靠性越差。 而導(dǎo)引頭整體向著小型化和高精度的方向發(fā)展, 使得采用旋轉(zhuǎn)變壓器作為測(cè)角元件的伺服系統(tǒng)無法滿足導(dǎo)引頭的發(fā)展需求。 本文設(shè)計(jì)開發(fā)了一款基于新型數(shù)字量電位器的雷達(dá)導(dǎo)引頭伺服控制系統(tǒng), 滿足了導(dǎo)引頭小型化和高精度的發(fā)展需要。
1 系統(tǒng)組成及原理
該雷達(dá)伺服控制系統(tǒng)主要由控制器、 驅(qū)動(dòng)器和執(zhí)行反饋單元組成,控制器以DSP 為控制核心,通過FPGA 與上位機(jī)通信,并將控制信號(hào)下發(fā)給執(zhí)行反饋單元,同時(shí)采集執(zhí)行反饋單元的角度、角速度及電流等信號(hào),驅(qū)動(dòng)器以電機(jī)驅(qū)動(dòng)模塊為核心,接收經(jīng)光耦隔離后的控制信號(hào),并將其放大后用于驅(qū)動(dòng)電機(jī)轉(zhuǎn)動(dòng),執(zhí)行反饋單元包括方位、俯仰電機(jī)和電位器以及運(yùn)動(dòng)執(zhí)行機(jī)構(gòu)等,控制系統(tǒng)組成框圖見圖1。
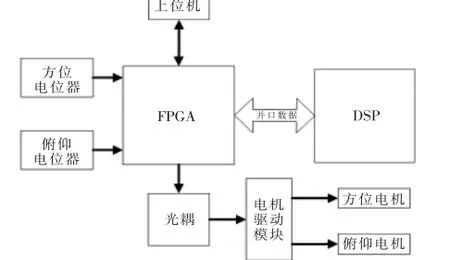
圖1 控制系統(tǒng)組成框圖
系統(tǒng)工作原理為控制器接收到上位機(jī)下發(fā)的指令后,進(jìn)入相應(yīng)的控制流程,經(jīng)過DSP 運(yùn)算后輸出控制信號(hào)到驅(qū)動(dòng)器,經(jīng)隔離放大后驅(qū)動(dòng)電機(jī)帶動(dòng)負(fù)載按要求轉(zhuǎn)動(dòng),電位器實(shí)時(shí)反饋角度信號(hào)并參與系統(tǒng)閉環(huán)控制。
2 系統(tǒng)硬件設(shè)計(jì)
2.1 新型數(shù)字量電位器
目前,業(yè)內(nèi)傳統(tǒng)的高精度電位器線性度約為0.5%,模擬信號(hào)傳輸,需要在伺服控制電路中進(jìn)行AD 采樣,采樣換算以后的測(cè)角誤差通常在12′以上[4],精度較低,在早期的雷達(dá)導(dǎo)引頭伺服系統(tǒng)上有應(yīng)用,對(duì)安裝要求高,需要對(duì)模擬信號(hào)傳輸線路做可靠的屏蔽處理。由于其價(jià)格優(yōu)勢(shì),目前多應(yīng)用于對(duì)角精度要求不高的舵機(jī)控制[5-6]。
新型數(shù)字量電位器組成框圖如圖2 虛線框內(nèi)所示,主要包括電源預(yù)處理電路, 執(zhí)行部件,AD 采樣電路、 后處理電路以及接口電路。
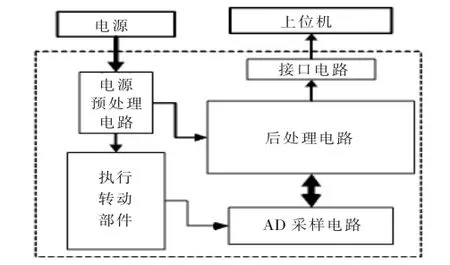
圖2 新型數(shù)字量電位器組成框圖
其中, 電源預(yù)處理電路實(shí)現(xiàn)濾波、 穩(wěn)壓以及電壓轉(zhuǎn)換功能, 執(zhí)行轉(zhuǎn)動(dòng)部件為傳統(tǒng)的電位器本體部分,即電阻體和轉(zhuǎn)動(dòng)體等,用于輸出角度轉(zhuǎn)動(dòng)對(duì)應(yīng)用的電壓量,AD 采樣電路完成對(duì)該電壓量的模數(shù)轉(zhuǎn)換, 并將轉(zhuǎn)換后的數(shù)字量傳輸至后處理電路, 后處理電路主要完成角度值的解碼以及角度值的插值、濾波補(bǔ)償,并將補(bǔ)償后的角度值通過差分?jǐn)?shù)字接口芯片發(fā)送給上位機(jī)。 新型數(shù)字量電位器的特點(diǎn)主要有結(jié)構(gòu)尺寸小、重量輕、抗干擾能力強(qiáng)、角度測(cè)量精度高,安裝便捷等。與傳統(tǒng)電位器相比,增加了電源預(yù)處理電路,提高了電源品質(zhì),將AD 采樣電路與執(zhí)行部件集成為一體, 極大程度減小了模擬量長(zhǎng)距離傳輸受干擾的風(fēng)險(xiǎn),并且通過后處理電路補(bǔ)償后,使得電位器測(cè)角精度成倍提升,實(shí)現(xiàn)了更高精度測(cè)角。新型數(shù)字量電位器實(shí)物示意圖見圖3,大小約¢35mm×16mm。

圖3 新型電位器結(jié)構(gòu)示意圖
2.2 控制器硬件電路
伺服控制器采用DSP+FPGA 硬件架構(gòu),DSP 選用TI公司的TMS320F28335,F(xiàn)PGA選用XILINX 公司spartan6 系列XC6SLX45。 TMS320F28335 是TI 公司推出的32 位浮點(diǎn)數(shù)字控制處理器(DSP),外設(shè)豐富,在電機(jī)控制通信醫(yī)療航空航天等領(lǐng)域有廣泛的應(yīng)用[7]。 TMS320F28335DSP整合了Flash 存儲(chǔ)器、 快速的A/D 轉(zhuǎn)換器、 增強(qiáng)的CAN模塊、事件管理器、正交編碼電路接口及多通道緩沖串口等功能, 共有6 對(duì)ePWMxA 和ePWMxB 模塊, 主頻高達(dá)150MHz,具有強(qiáng)大的控制和信號(hào)處理能力,能夠完成復(fù)雜的控制算法[8]。XC6SLX45 屬于高性價(jià)比邏輯控制芯片,管腳多,資源豐富,廣泛應(yīng)用于工業(yè)控制領(lǐng)域。 控制器核心電路原理框圖見圖1。 FPGA 芯片主作為數(shù)據(jù)收發(fā)、轉(zhuǎn)換樞紐,與DSP 通過并口總線相連,與上位機(jī)、電位器通過串口收發(fā)芯片3490 相連, 與驅(qū)動(dòng)器之間通過光耦隔離芯片相連,與AD 之間通過SPI 串口相連實(shí)現(xiàn)電流采樣。
2.3 驅(qū)動(dòng)器硬件電路
驅(qū)動(dòng)器以電機(jī)驅(qū)動(dòng)芯片LMD18200-2D-QV 為主體開展設(shè)計(jì)。 LMD18200-2D-QV 是美國(guó)國(guó)家半導(dǎo)體公司設(shè)計(jì)的專用于驅(qū)動(dòng)電機(jī)的芯片,額定運(yùn)行參數(shù)為:額定電流3A,峰值電流6A,電源電壓可達(dá)55 V,內(nèi)部包括MOS 管構(gòu)成的H 橋及其邏輯控制電路,芯片內(nèi)部的H 橋驅(qū)動(dòng)器由4 個(gè)MOS 管構(gòu)成, 通過充電泵電路為4 個(gè)MOS 管提供柵極控制電壓,輸入信號(hào)兼容TTL 和CMOS,內(nèi)置過流報(bào)警和過熱報(bào)警以及自動(dòng)關(guān)斷[9]。驅(qū)動(dòng)器核心電路框圖如圖4。方向(DIR)、剎車(BREAK)、占空比(PWM)三路控制信號(hào)經(jīng)光耦(U7)隔離后,輸入電機(jī)驅(qū)動(dòng)芯片(U8),經(jīng)功率放大后控制電機(jī) 轉(zhuǎn) 動(dòng)(D1、D2分別為直流電機(jī)兩端接口)。
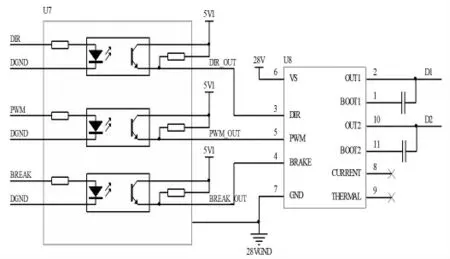
圖4 驅(qū)動(dòng)器核心電路框圖
3 軟件設(shè)計(jì)
伺服控制系統(tǒng)軟件設(shè)計(jì)包括DSP 軟件設(shè)計(jì)和FPGA軟件設(shè)計(jì)。 FPGA 軟件主要實(shí)現(xiàn)數(shù)據(jù)收發(fā)、 串并轉(zhuǎn)換及角度、角速度反饋單元的反饋數(shù)據(jù)解碼,與DSP 之間進(jìn)行并口通信,與上位機(jī)進(jìn)行串口通信。 DSP 主要進(jìn)行流程處理和控制算法處理,軟件由主程序模塊、分支子程序和中斷子程序模塊組成,主程序模塊包括系統(tǒng)初始化、讀寫外部端口、設(shè)置分支邏輯等;分支子程序主要有預(yù)置子程序、搜索子程序、跟蹤子程序等;中斷子程序包括位置環(huán)控制子程序和速度環(huán)控制子程序。 流程控制框圖見圖5。
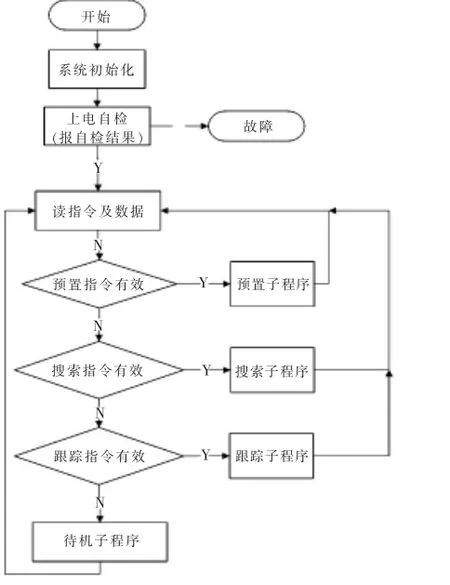
圖5 流程控制框圖
系統(tǒng)上電后首先進(jìn)行系統(tǒng)自檢,根據(jù)設(shè)定好的自檢流程,控制電機(jī)帶動(dòng)負(fù)載轉(zhuǎn)動(dòng), 如果在規(guī)定的時(shí)間內(nèi)完成自檢,則上報(bào)自檢正常,否則上報(bào)故障,中止后續(xù)流程, 系統(tǒng)處于剎車保護(hù)狀態(tài)。 整個(gè)自檢過程涵蓋了硬件控制電路、芯片、電機(jī)、執(zhí)行機(jī)構(gòu)、 角度和角速度反饋元件等各個(gè)環(huán)節(jié)的檢測(cè), 可根據(jù)故障時(shí)的數(shù)據(jù)快速準(zhǔn)確定位哪個(gè)環(huán)節(jié)出現(xiàn)了故障。 自檢完成后,系統(tǒng)默認(rèn)回到待機(jī)狀態(tài),實(shí)時(shí)接收判斷上位機(jī)是否有最新指令下發(fā)。
4 試驗(yàn)測(cè)試
4.1 角精度測(cè)試
以往采用旋轉(zhuǎn)變壓器做為角度反饋元件的伺服系統(tǒng),需要在系統(tǒng)級(jí)進(jìn)行角精度測(cè)試,搭建如圖6 的測(cè)試系統(tǒng), 通過專用測(cè)試工裝將機(jī)構(gòu)轉(zhuǎn)軸轉(zhuǎn)到某一被測(cè)角度位置后鎖死,然后上三坐標(biāo)進(jìn)行測(cè)試,通常認(rèn)為三坐標(biāo)精度高,將其測(cè)試結(jié)果作為真值,集成控制驅(qū)動(dòng)器將解碼后的角度數(shù)據(jù)發(fā)送給上位機(jī),與三坐標(biāo)上顯示的角度數(shù)據(jù)做比較,差值即為角度誤差。這種系統(tǒng)級(jí)的測(cè)試相對(duì)麻煩,且不能按照一定的步進(jìn)量有規(guī)律的進(jìn)行測(cè)試,測(cè)試的角度數(shù)據(jù)量相對(duì)較少。
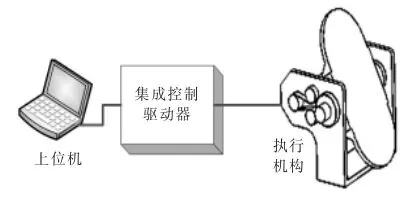
圖6 系統(tǒng)級(jí)角精度測(cè)試示意圖
采用新型數(shù)字量電位器做為角度反饋元件的伺服系統(tǒng),將電位器轉(zhuǎn)軸與機(jī)構(gòu)轉(zhuǎn)軸同軸安裝,通過精心設(shè)計(jì)機(jī)構(gòu)軸系, 電位器的角度精度即可反映伺服系統(tǒng)的角度精度,因此,可以將角精度測(cè)試由系統(tǒng)級(jí)簡(jiǎn)化到元器件級(jí)進(jìn)行測(cè)試,省時(shí)省力,還可以避免由工裝加工誤差引入的測(cè)試誤差。 新型數(shù)字量電位器角精度測(cè)試時(shí),只需一臺(tái)小型較高精度的轉(zhuǎn)臺(tái)和上位機(jī), 將電位器安裝到轉(zhuǎn)臺(tái)上后,控制轉(zhuǎn)臺(tái)按一定的步進(jìn)量進(jìn)行轉(zhuǎn)動(dòng),將轉(zhuǎn)臺(tái)顯示的結(jié)果作為真值與上位機(jī)讀取的角度數(shù)據(jù)對(duì)比,差值即為角度誤差。
表1 為某臺(tái)新型數(shù)字量電位器角精度的測(cè)試結(jié)果,由于數(shù)據(jù)量較大,表中只統(tǒng)計(jì)了每2°間隔的測(cè)試數(shù)據(jù),圖7 為±20°以內(nèi)統(tǒng)計(jì)的120 個(gè)測(cè)試點(diǎn)的誤差曲線(其中,±10°以內(nèi)測(cè)試步進(jìn)為0.2°,±10°以外測(cè)試步進(jìn)為1°,橫坐標(biāo)為測(cè)試點(diǎn)數(shù),縱坐標(biāo)為角度誤差值,單位為度)。從測(cè)試結(jié)果可知,角度誤差最大0.03°,小于2′,精度較高。

表1 某臺(tái)新型數(shù)字量電位器角精度(單位:/°)
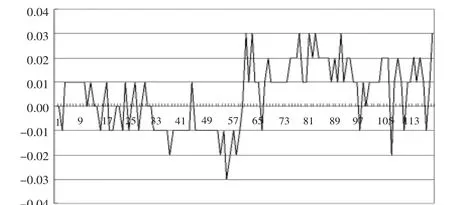
圖7 角度誤差曲線
4.2 系統(tǒng)測(cè)試
系統(tǒng)測(cè)試主要針對(duì)和角度相關(guān)的零位和角度預(yù)置進(jìn)行了測(cè)試。 圖8 是在上位機(jī)下發(fā)零位鎖定指令后測(cè)得的角度反饋數(shù)據(jù),圖9 是在角度預(yù)置流程中預(yù)置不同角度,系統(tǒng)反饋的實(shí)際角度數(shù)據(jù)。分析測(cè)試數(shù)據(jù)可知,采用新型數(shù)字量電位器做為角度反饋元件的伺服系統(tǒng),在零位鎖定和角度預(yù)置狀態(tài)下,角度數(shù)據(jù)穩(wěn)定可靠,角度噪聲在0.01°以下,圖10 是圖9 矩形框框中位置的局部放大圖, 從放大圖統(tǒng)計(jì)可得,0 到20°的角度預(yù)置時(shí)間約為0.8s(預(yù)置到位約330 個(gè)采樣點(diǎn),每個(gè)采樣點(diǎn)2.5ms),預(yù)置曲線平滑過渡,預(yù)置時(shí)間較短,滿足系統(tǒng)的使用要求。
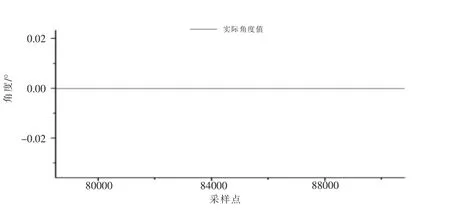
圖8 零位鎖定角度數(shù)據(jù)
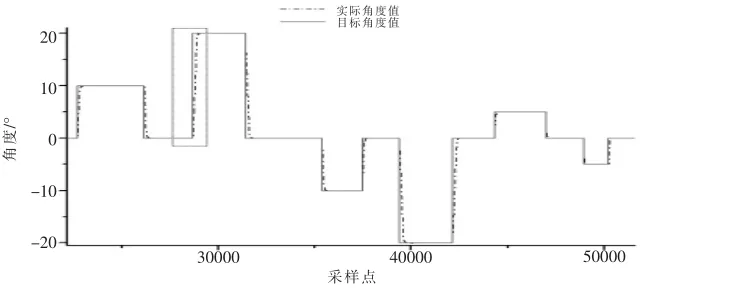
圖9 預(yù)置流程角度數(shù)據(jù)
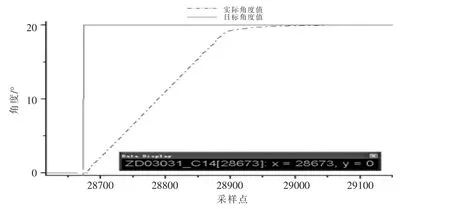
圖10 預(yù)置流程角度數(shù)據(jù)
5 結(jié)束語(yǔ)
設(shè)計(jì)開發(fā)了一款基于新型數(shù)字量電位器的雷達(dá)導(dǎo)引頭伺服控制系統(tǒng)。 介紹了新型電位器的工作原理和伺服控制系統(tǒng)的硬件、軟件設(shè)計(jì)。基于新型數(shù)字量電位器伺服控制系統(tǒng)不僅具有定位精度高, 抗干擾能力強(qiáng)等優(yōu)點(diǎn)等優(yōu)點(diǎn),對(duì)于力矩電機(jī)直驅(qū)伺服系統(tǒng),系統(tǒng)角精度測(cè)試可由電位器器件級(jí)精度測(cè)試替代,減少了測(cè)試難度,節(jié)約了研制成本,具有較高的工程應(yīng)用價(jià)值。