基于虛擬化的相向行駛車輛間通信機制的研究
2021-10-26 07:44:12劉國滿白曉燃
自動化與儀表 2021年10期
關鍵詞:機制
劉國滿,盛 敬,白曉燃
(南昌工程學院 機械工程學院,南昌330099)
車聯網作為物聯網中一個重要的應用領域,隨著其技術的不斷發展和成熟,其應用領域和規模不斷擴大,據專家初步估計,將來一兩年全球車聯網V2X市場將突破6500 億元,中國V2X 用戶將超過6000萬,滲透率超過20%,市場規模超過2000 億[1]。而無人駕駛技術是集人工智能、車輛工程、自動控制、信息通信、新能源、新材料等眾多技術于一體,是衡量一個國家科研水平和工業實力的一個重要標志[2]。
當前國內外很多汽車企業和互聯網公司從事無人駕駛汽車的開發和研究,并且取得了一定的成果,如谷歌公司開發的Waymo 和百度公司開發的Apollo 等無人駕駛汽車已在一定情況下,進行實際路基測試,并在特定領域進行應用。但這兩者技術都離不開車輛之間通信技術,而當前車輛之間通信性能不穩定,其主要表現如以下兩點:
(1)通信信道不穩定:車與車之間通信時很容易受到周邊障礙物或車輛運動變化的影響,使得車輛之間通信信道很不穩定。
(2)通信鏈路性能差:因為在高速移動車輛之間通信,存在車輛的速度變化快,移動方向不確定,導致網絡拓撲變化過于頻繁,使得通信鏈路連接時斷時好,節點之間的鏈路連接存在時間不長久[3]。
特別對相向行駛的兩個車輛來說,其相互通信鏈路持續時間LDT 很短。比如兩個相向行駛的車輛速度都為15 m/s 情況來說,其兩者通信有效半徑為20 m,其相互之間可以通信鏈路持續時間LDT 只有0.25 s 左右,如圖1所示。

圖1 相向行駛車輛通信鏈路持續時間仿真示意圖Fig.1 Simulation diagram of communication link duration of opposite vehicles
圖1中縱坐標表示能夠與其通信的相向行駛的車輛ID 號,橫坐標表示相向運行車輛通信信號采集的時間,單位為s;從該仿真圖可以看出,其相向行駛的車輛之間通信鏈路持續時間LDT 比較短,嚴重地影響了車輛之間通信的效果。所以很有必要研究基于虛擬化的相向行駛車輛間通信機制和算法,來增加相向行駛車輛間通信的有效時間。文獻[4]提出了車與車間分簇路由通信機制,其簇內成員采用可以直接相互通信,而簇外成員之間通信采用簇頭轉發方式來是實現通信;文獻[5]描述了車輛間主動式路由協議DSDV,要求每個車輛周期性地發送HELLO 報文,從而在車聯網中全部車輛都維護一張能夠通往任意車輛的路由信息;文獻[6]描述了DSR,AODV 兩種反應式路由協議,僅僅在車輛需要發送信息時,才會啟動路由發現過程,建立與目的車輛間轉發路徑;文獻[7]提出了DBR 路由協議,該協議是根據車輛間距離和當前的車輛速度來選擇下一跳,車輛間距離依賴于車輛間的相對速度;文獻[8]提出IGR(impproved geographical routing)協議,主要是結合了車輛間方向、距離及轉發進度等因素來選擇下一跳;文獻[9]描述了GSR 路由協議,主要根據特定路由算法計算出一條距離最短的路徑,并在路由中包含路口信息,可以解決GPSR 沒考慮的方向問題。
1 行駛車輛節點的虛擬化機制
1.1 虛擬化機制和原理
本文所述的虛擬化是指將路上行駛的具有同樣或相似運行特征,如運行的方向、速度以及相互間相對距離、方向角等的兩個或兩個以上運行車輛節點,被看作一個虛擬的車輛節點與外界車輛節點進行通信,如圖2所示。

圖2 虛擬化機制示意圖Fig.2 Schematic diagram of virtualization mechanism
圖2中運行的3 輛汽車A,B,C 以同一個方向進行行駛,其相互之間距離相對穩定,運行速度相似等,就可以將這3 個車輛節點A,B,C 看作一個虛擬車輛節點,與外界車輛節點進行通信,且與外界車輛節點通信采用串行方式,虛擬車輛節點上任何子節點A,B,C,都可以與外界節點獨立通信,但同一信息報文只能選擇其中一個子節點與外界車輛節點進行通信[10]。
另外,相向車輛間通信鏈路持續時間LDT,其計算公式為

式中:Tr表示車輛之間有效通信半徑;Vi和Vj分別表示兩個相向行駛車輛運動平均速度[11];φ 表示相向行駛車輛之間偏差角,由于相向行駛車輛之間存在偏差角,所以兩車實際距離Sd與水平距離L 存在一定差別,如圖3所示。

圖3 相向行駛車輛實際距離與水平距離關系示意圖Fig.3 Schematic diagram of relationship between actual distance and horizontal distance of vehicles driving opposite direction
所以Sd與L 之間關系為

1.2 虛擬空間拓撲更新機制
在車輛運行過程中,虛擬空間上某一個子節點相對于其它子節點來說,出現了運動特征的變化,如速度或方向上突然變化,而不能維持虛擬節點內部拓撲結構相對穩定狀態,這時候就需要對虛擬節點上拓撲結構進行更新,刪除虛擬空間上一個或多個子節點。另一方面,當外界其它車輛節點出現了與虛擬空間上節點相同或相似運動性質時,則虛擬空間將接收該車輛節點為虛擬空間上節點,更新虛擬空間拓撲結構。但考慮到虛擬空間節點通信信道的穩定性,則不易頻繁地更新虛擬空間拓撲結構,這里采用3 個車輛運動相關模糊參量變化情況來判斷虛擬空間拓撲更新的可能大小。這3 個模糊參量分別是虛擬空間內相鄰子節點之間距離D、與虛擬空間內所有子節點的相對速度差SV以及相鄰子節點之間角度θ,可根據這3 個模糊參量變化情況,可以將虛擬空間拓撲更新的可能性分成5 檔:Very Small,Small,Normal,Big 和Very Big,制定了以下拓撲更新模糊規則[12],如表1所示。
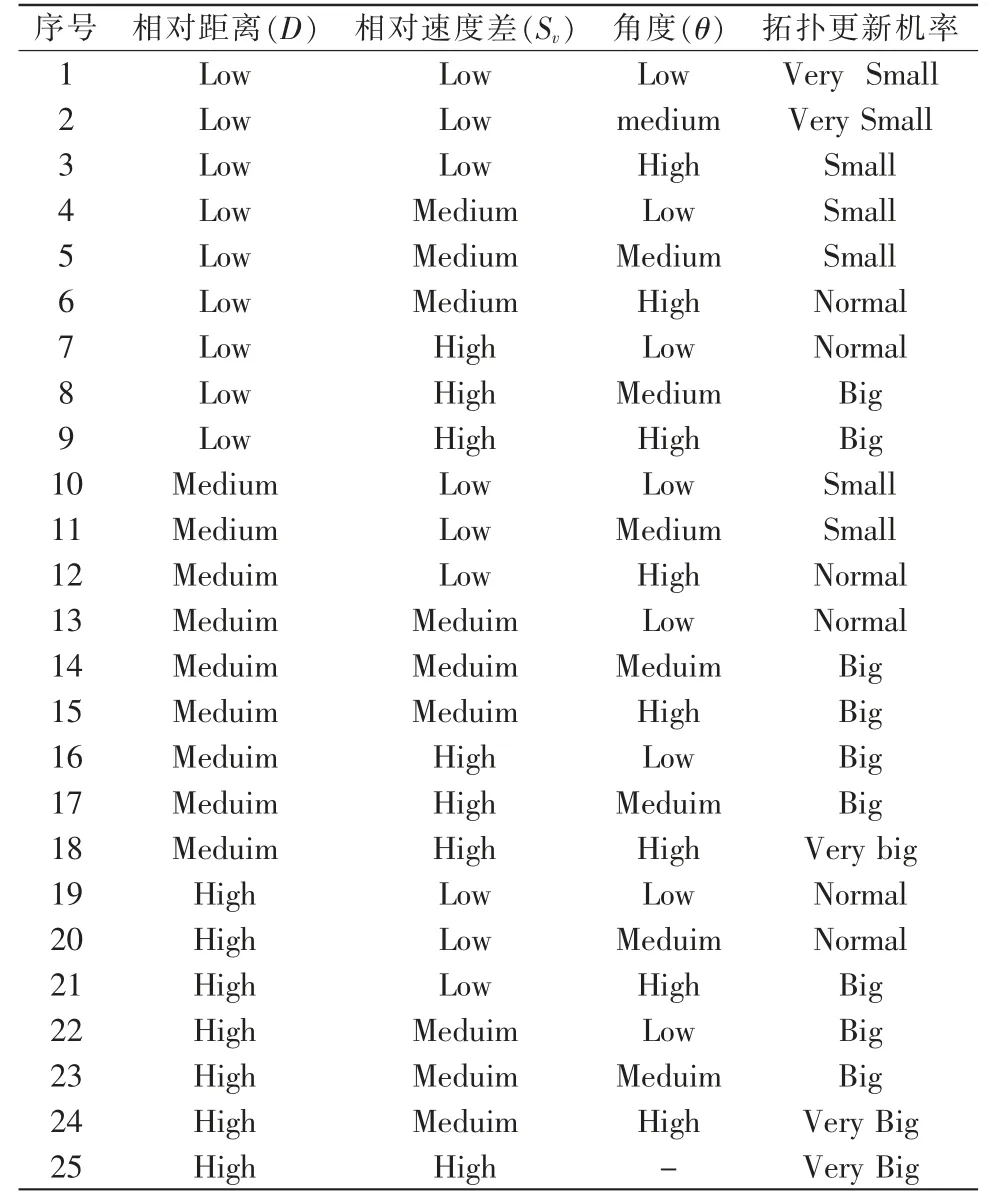
表1 虛擬空間拓撲更新模糊規則Tab.1 Virtual space topology updates fuzzy rule
1.3 虛擬空間節點形成機制
在成立虛擬空間之前,需要每個車輛節點向其直接相鄰節點廣播其本車輛節點行駛的性質[13],包括其當前運動平均速度、運行的方向以及當前所在位置以及其已知的相鄰其它車輛節點的行駛性質,以便在其可通信范圍內所有車輛節點學習到整個通信范圍內所有車輛節點的行駛性質,根據自組織網絡方式,將行駛性質相似的幾個車輛節點組成一個虛擬空間節點,并根據車輛所處的位置和其他子節點通信距離、時間等參數,系統將會選擇虛擬空間范圍內接近中間位置的車輛節點作為該虛擬空間控制節點,維護和管理該虛擬空間。當控制節點出現異常或從該虛擬空間中刪除,則根據車輛所處的中間位置,重新選擇一個車輛節點作為虛擬空間控制節點。其整個流程如圖4所示。
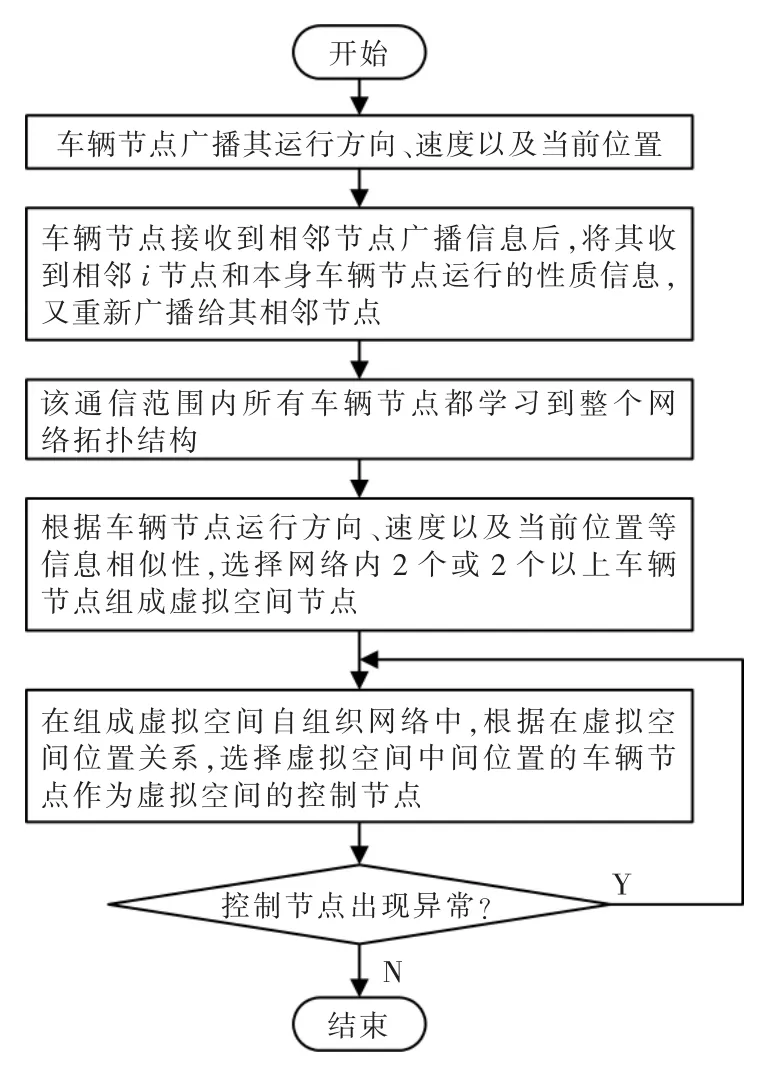
圖4 虛擬空間形成流程Fig.4 Formation flow chart of virtual space
1.4 虛擬空間內通信機制
對于虛擬空間內子節點之間通信機制,主要分成兩種:一種針對其直接相鄰的虛擬空間內子節點來說,采用特定頻段的組播方式進行網絡通信,以便周圍的虛擬空間內子節點能接收到組播報文;另一種對于沒有直接相鄰的虛擬空間子節點來說,若采用逐跳轉發方式,可能帶來較大拓撲更新的復雜性和傳送延遲[14]。所以對于部分虛擬空間子節點之間,也可以考慮建立邏輯上端到端傳送路徑方式,實現部分虛擬空間子節點之間通信,減少拓撲變化的影響,提高了報文的傳送效率。
1.5 虛擬空間節點與外界節點通信機制
由于虛擬空間節點對于外界車輛節點來說,相對于一個車輛節點與外界車輛節點進行通信,從而減少了信息傳遞的節點跳數[15]。且虛擬空間節點與外界車輛節點之間通信,可以根據虛擬空間上子節點與外界通信車輛節點之間實際距離,選擇虛擬空間任何一個子節點進行通信,如圖5所示。
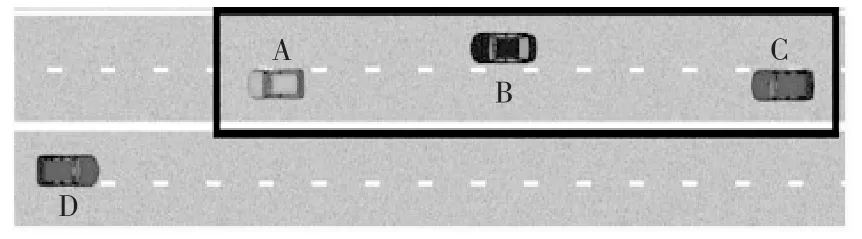
圖5 虛擬空間節點與外界通信機制Fig.5 Communication mechanism between virtual space node and outside
對于一個A,B,C 三個車輛節點組成一個虛擬空間與對向行駛的D 車輛通信來說,車輛D 將根據虛擬空間上子節點A,B,C 是否在其通信有效范圍內或通信的性能來選擇不同的子節點作為虛擬空間節點實際通信的節點。另外,虛擬空間上子節點接收到相向行駛的車輛發送過來的信息,再通過虛擬空間內部通信機制,將所收到信息進行內部轉發,以便虛擬空間上所有車輛節點接收到該信息。
2 驗證和測試
本部分主要采用對比分析的方法來分析相向行駛車輛之間通信連接的可靠性以及它們之間鏈路持續時間LDT 的仿真測量[16-17]。首先對沒有虛擬化獨立相向行駛的車輛運行場景進行仿真,其仿真結果如圖1所示;然后采用將2 個運行行駛的車輛虛擬化成1 個虛擬節點,與對向行駛的車輛進行通信時,且3 個車輛運動速度均為15 m/s,為了保證車輛之間通信可靠性,設定車輛有效通信半徑為20 m,則Prescan 設定場景如圖6所示,Matlab 仿真結果如圖7所示。

圖6 基于2 個車輛虛擬機制相向通信場景Fig.6 Communication scenario based on two vehicles virtual mechanism
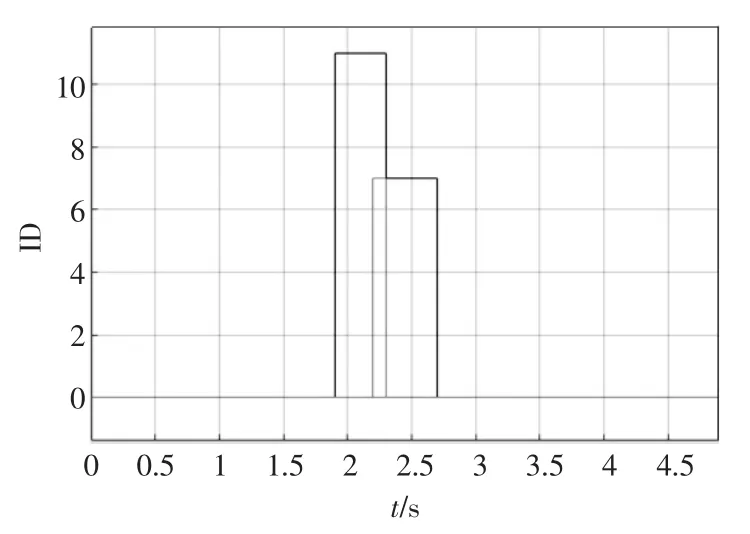
圖7 兩個車輛虛擬化的仿真結果Fig.7 Simulation results of two vehicles virtualization
圖7中縱坐標和橫坐標的坐標值與圖1一樣,從仿真結果可以看出,其相向行駛的車輛與兩個車輛組成虛擬空間之間鏈路持續時間為0.7 s 左右,幾乎比前者單個車輛之間通信鏈路持續時間LDT 擴大2 倍以上。
下面以3 個車輛組成虛擬空間與相向行駛的車輛進行通信時,其設定Prescan 運動場景如圖8所示;其運行速度也都設定為15 m/s,其車載通信設備有效通信半徑為20 m。則虛擬空間節點與相向行駛車輛之間通信的仿真結果如圖9所示。

圖8 基于3 個車輛虛擬機制相向通信場景Fig.8 Communication scenario based on three vehicles virtual mechanism
從圖9仿真結果來說,3 個車輛虛擬化后,其組成的虛擬空間節點與相向獨立車輛通信的鏈路持續時間LDT 接近于1.1 s 左右,幾乎為虛擬化前鏈路持續時間的4~5 倍,所以有力地說明了本文所述虛擬化機制能增加相向行駛車輛之間通信鏈路持續時間LDT,有利于相向行駛車輛之間的通信可靠性。

圖9 三個車輛虛擬化的仿真結果Fig.9 Simulation results of three vehicles virtualization
3 結語
根據Prescan/Matlab 對相向行駛車輛的運動場景的仿真,可以明顯地看出將多個具有相同方向、相似的運動速度以及相近位置的車輛,虛擬成一個具有多個子節點組成的虛擬空間節點,實現與相向行駛車輛之間通信。通過仿真結果表明,將2 個或3個車輛組成虛擬化空間后,能顯著地增加相向行駛車輛之間通信鏈路持續時間LDT,有利于相向行駛車輛之間通信的可靠性。但當前實驗主要是在虛擬空間內子節點之間通信正常情況下所做的仿真,假如虛擬空間內子節點通信出現異常情況,也可能會影響到虛擬空間節點與外界車輛節點通信的可靠性[18-19],所以這也是將來需要考慮虛擬空間內子節點之間通信機制和方案。
猜你喜歡
四川勞動保障(2021年9期)2022-01-18 05:11:08
文苑(2018年21期)2018-11-09 01:23:06
當代陜西(2018年9期)2018-08-29 01:21:00
當代陜西(2017年12期)2018-01-19 01:42:33
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:00
中國衛生(2016年9期)2016-11-12 13:28:08
中國衛生(2015年9期)2015-11-10 03:11:12
醫學研究雜志(2015年12期)2015-06-10 06:57:46
中國衛生(2014年3期)2014-11-12 13:18:12
中國火炬(2014年4期)2014-07-24 14:22:19