基于Hough變換的發(fā)控轉(zhuǎn)接組合視頻監(jiān)測(cè)軟件設(shè)計(jì)與實(shí)現(xiàn)
2021-10-26 06:11:06梅春睿劉巾杰胡旭東廖國(guó)瑞
導(dǎo)彈與航天運(yùn)載技術(shù) 2021年5期
關(guān)鍵詞:自動(dòng)識(shí)別檢測(cè)
梅春睿,劉巾杰,胡旭東,廖國(guó)瑞
(中國(guó)文昌航天發(fā)射場(chǎng),文昌,571300)
0 引 言
發(fā)控轉(zhuǎn)接組合是當(dāng)前中國(guó)航天器發(fā)射場(chǎng)中火箭控制系統(tǒng)地面測(cè)發(fā)控系統(tǒng)前端核心設(shè)備之一,其前面板分布著重要狀態(tài)的指示燈。控制系統(tǒng)通過它來實(shí)現(xiàn)箭上設(shè)備供配電、信號(hào)邏輯實(shí)現(xiàn)、與外系統(tǒng)信息交互、狀態(tài)顯示等功能。地面測(cè)發(fā)控階段和發(fā)射階段,前端崗位人員分別在臍帶塔和后端測(cè)試發(fā)射大廳實(shí)時(shí)監(jiān)測(cè)發(fā)控轉(zhuǎn)接組合前面板指示燈狀態(tài)變化,并向系統(tǒng)指揮員反饋情況。需要崗位人員掌握測(cè)試原理,明確測(cè)試流程中指示燈的亮滅時(shí)機(jī)及邏輯順序,并快速向指揮員匯報(bào)測(cè)試現(xiàn)象。
當(dāng)前工作模式下,控制系統(tǒng)地面測(cè)發(fā)控前端對(duì)發(fā)控轉(zhuǎn)接組合的監(jiān)測(cè)主要通過人工實(shí)現(xiàn),依賴于崗位人員的專業(yè)能力和注意力集中情況。該方式存在以下缺點(diǎn):
a)難以長(zhǎng)時(shí)間保持高度注意。實(shí)際測(cè)試過程往往長(zhǎng)達(dá)2~3 h,發(fā)射日更是長(zhǎng)達(dá)12 h,人員容易產(chǎn)生疲勞感,注意力下降。而指示燈發(fā)生變化過程往往不到1 s,崗位人員難以準(zhǔn)確捕捉到每一個(gè)指示燈狀態(tài)變化時(shí)機(jī),漏看、錯(cuò)看的情況難以避免,監(jiān)測(cè)準(zhǔn)確性難以保證。
b)測(cè)試無記錄文件留存。實(shí)際工作中,人員不僅需要時(shí)刻緊盯發(fā)控轉(zhuǎn)接組合指示燈,同時(shí)還需要監(jiān)測(cè)地供電源、地面電源1、地面電源2、地面電源3主副機(jī)共8個(gè)地面電源的電壓及電流示數(shù)變化,需要觀察電源控制組合指示燈以及其他前端設(shè)備的工作情況。特殊動(dòng)作時(shí)多個(gè)指示燈往往集中在同一時(shí)間段內(nèi)改變狀態(tài),崗位人員不具備在試驗(yàn)現(xiàn)場(chǎng)形成記錄文件的條件。試驗(yàn)過程無記錄文件留存,不利于測(cè)試過程的可追溯性,不利于故障排查工作的開展。
c)示警過程冗長(zhǎng)。出現(xiàn)異常情況時(shí),當(dāng)前試驗(yàn)條件下,崗位人員可通過電話或調(diào)度聯(lián)系后端指揮員進(jìn)行示警,往往花費(fèi)時(shí)間較多,不能及時(shí)示警,不能快速準(zhǔn)確傳達(dá)異常情況。-3 min伺服啟動(dòng)后,每分每秒都很珍貴,通過崗位人員口頭傳遞信息容易錯(cuò)失最佳的故障處理時(shí)機(jī)。
本文設(shè)計(jì)并實(shí)現(xiàn)的發(fā)控轉(zhuǎn)接組合視頻監(jiān)測(cè)軟件,可以依托于測(cè)試發(fā)射大廳的視頻計(jì)算機(jī)進(jìn)行運(yùn)用,具有硬件支撐,具備可實(shí)施性。自動(dòng)監(jiān)測(cè)可有效輔助崗位人員工作,極大降低漏看、錯(cuò)看幾率;自動(dòng)記錄留存有利于試驗(yàn)過程記錄的完整性;及時(shí)示警功能可彌補(bǔ)緊急情況下故障信息傳遞時(shí)效性問題。該項(xiàng)目緊貼當(dāng)前試驗(yàn)現(xiàn)場(chǎng)狀況,針對(duì)性地彌補(bǔ)了試驗(yàn)工作模式缺陷,具備應(yīng)用價(jià)值。
1 需求分析
1.1 功能性需求
依據(jù)發(fā)射場(chǎng)現(xiàn)行工作模式,發(fā)控轉(zhuǎn)接組合屬于發(fā)控前端崗位設(shè)備。人員上崗后,在系統(tǒng)進(jìn)行測(cè)試時(shí),需要同時(shí)觀察發(fā)控轉(zhuǎn)接組合指示燈情況及地面電源電壓電流示數(shù)。結(jié)合人員難以長(zhǎng)時(shí)間保持高度注意力、測(cè)試無記錄文件留存、示警過程冗長(zhǎng)的現(xiàn)實(shí)特點(diǎn),圖1列出了發(fā)控轉(zhuǎn)接組合視頻監(jiān)測(cè)軟件的功能要求。

圖1 功能性需求分析Fig.1 Functional Requirements Analysis
圖1中,視頻及條形圖的共同顯示令指示燈變化情況更加直觀,可以輔助崗位人員集中注意力;語(yǔ)音提示和歷史狀態(tài)變化列表可以輔助崗位人員及時(shí)觀測(cè)地面電源電壓、電流示數(shù),防止錯(cuò)過數(shù)據(jù)變化時(shí)機(jī);自動(dòng)記錄狀態(tài)變化到Excel及一鍵生成Word文檔有助于記錄留存及測(cè)試過程回顧復(fù)查;特殊音效示警可以及時(shí)引起崗位人員和指揮員注意;故障模式識(shí)別及彈框示警能夠顯示故障模式,幫助指揮員快速實(shí)現(xiàn)故障定位。
1.2 非功能性需求
非功能性需求指的是在實(shí)現(xiàn)用戶需求的同時(shí),系統(tǒng)需要具備的特性,比如可靠性、穩(wěn)定性、可維護(hù)性等。非功能性需求是軟件功能的展現(xiàn)模式,它影響著功能性需求的定義、實(shí)現(xiàn)及使用[1]。即使一個(gè)軟件的功能再?gòu)?qiáng),若是使用方法復(fù)雜,用戶體驗(yàn)感極差,那么它強(qiáng)大的功能也無從展示。
發(fā)控轉(zhuǎn)接組合視頻監(jiān)測(cè)軟件在非功能性需求上需要達(dá)到以下幾點(diǎn)要求:
a)實(shí)用性。軟件應(yīng)當(dāng)具備簡(jiǎn)潔、友好的操作界面,盡量使用戶對(duì)軟件的操作使用方法一目了然;
b)可靠性。軟件開發(fā)過程中,如果軟件不能可靠地運(yùn)行,那么無論系統(tǒng)的功能多么全面,都無法保證用戶的基本需求得以滿足;
c)高性能。高性能指的是用戶對(duì)系統(tǒng)響應(yīng)速度的需求[1]。視頻監(jiān)控需要具備時(shí)效性,人工監(jiān)測(cè)時(shí)指示燈變化及匯報(bào)時(shí)間的誤差大約為2 s,以此為標(biāo)準(zhǔn)要求軟件的各類提示應(yīng)當(dāng)在2 s內(nèi)完成。
2 方案擬定
結(jié)合崗位人員和指揮員的需求分析,將軟件設(shè)計(jì)為4個(gè)模塊:初始化、實(shí)時(shí)監(jiān)控、實(shí)時(shí)示警和文件形成模塊,如圖2所示。
圖2中,實(shí)時(shí)監(jiān)控模塊要求軟件可以自動(dòng)識(shí)別發(fā)控轉(zhuǎn)接組合的指示燈亮滅情況。該設(shè)備指示燈形狀均為圓形,結(jié)合邊緣檢測(cè),以Hough變換作為理論支撐實(shí)現(xiàn)指示燈的自動(dòng)識(shí)別。
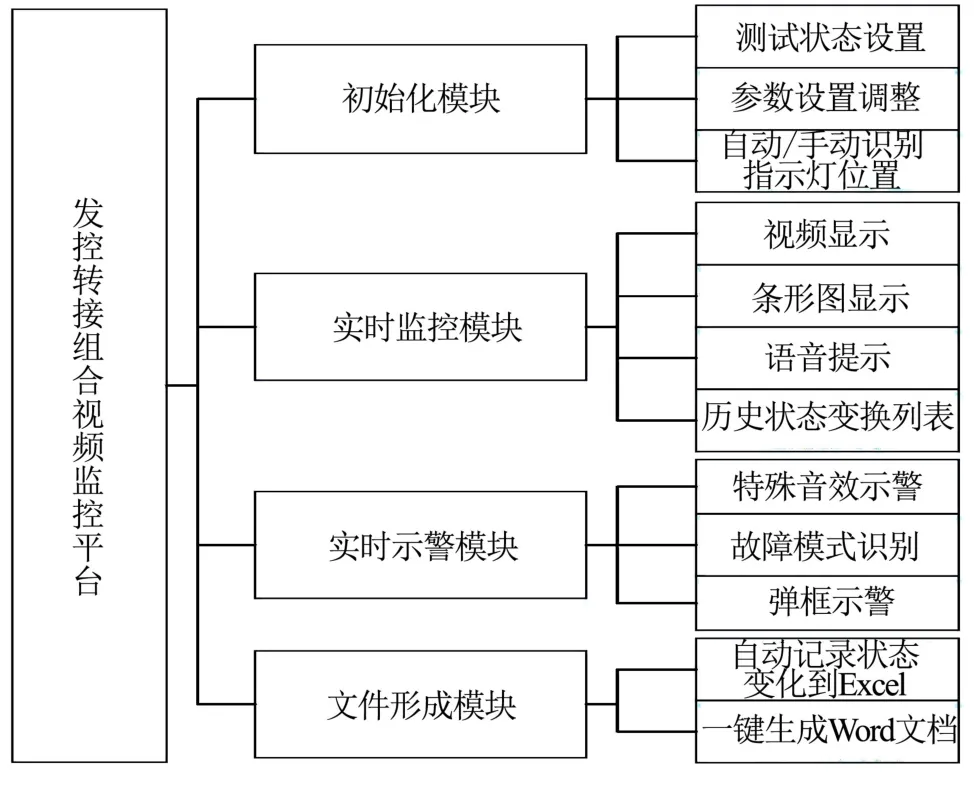
圖2 軟件總體設(shè)計(jì)方案Fig.2 Overall Design Scheme of the Software
為滿足用戶對(duì)系統(tǒng)響應(yīng)速度的需求,選擇具有強(qiáng)大數(shù)據(jù)處理能力的MATLAB軟件作為算法實(shí)現(xiàn)的基本工具。與此同時(shí),為了使用戶界面更加友好、接口更加簡(jiǎn)化,人機(jī)交互界面的開發(fā)工具也選擇了與MATLAB軟件更加適配的圖形用戶界面(GUI)工具包。其允許用戶定制用戶與計(jì)算機(jī)的交互方式,用戶通過窗口、菜單、按鍵等方式實(shí)現(xiàn)對(duì)數(shù)據(jù)的自動(dòng)化、可視化處理[2]。
3 邊緣檢測(cè)、Hough變換與算法實(shí)現(xiàn)
3.1 邊緣檢測(cè)
圖像邊緣是圖像中灰度不連續(xù)或急劇變換的所有像素的集合,集中了圖像的大部分信息,是圖像最基本的特性之一[3]。邊緣檢測(cè)是后續(xù)圖像分割、特征提取和識(shí)別等圖像分析領(lǐng)域的關(guān)鍵一步。比較常見的檢測(cè)算子有:Sobel、Prewitt、Roberts、Log、Canny。
Sobel算子能夠產(chǎn)生較好的檢測(cè)效果,對(duì)噪聲具有平滑抑制作用,但得到的邊緣較粗,可能出現(xiàn)偽邊緣;Prewitt算子減小了噪聲對(duì)圖像邊緣檢測(cè)的影響,但同樣對(duì)圖像邊緣檢測(cè)效果較粗,背景噪聲對(duì)算法有效性影響較大;Roberts算子對(duì)邊緣定位精度高,但無法抑制噪聲影響;Log算子在實(shí)際運(yùn)用中對(duì)噪聲敏感,噪聲平滑能力與邊緣定位能力相矛盾;Canny算子進(jìn)行圖像邊緣檢測(cè)較為有效,檢測(cè)紋理較細(xì),但噪聲影響較大。幾種算子各有利弊,可根據(jù)被識(shí)別圖像的特點(diǎn)靈活選擇。
3.2 Hough變換
Hough變換又稱霍夫變換,其本質(zhì)是從圖像空間到參數(shù)空間的映射。Hough變換的實(shí)質(zhì)是將圖像空間內(nèi)具有一定關(guān)系的像元進(jìn)行聚類,尋找能把這些像元用某一解析形式聯(lián)系起來的參數(shù)空間累計(jì)對(duì)應(yīng)點(diǎn)。Hough變換常被用于自動(dòng)化和機(jī)器人視覺等領(lǐng)域,廣泛應(yīng)用與產(chǎn)品部件的自動(dòng)監(jiān)視,生產(chǎn)過程自動(dòng)監(jiān)控,采用直線、圓弧作為基本特征的工業(yè)產(chǎn)品檢查系統(tǒng)等方向。
Hough變換將原始圖像中給定形狀的直線或者曲線上所有點(diǎn)都集中到變換空間的某個(gè)點(diǎn)上形成峰值[4]。這樣就把原始圖像中給定形狀的直線或曲線的檢測(cè)問題轉(zhuǎn)變成尋找變換空間中的峰值點(diǎn)問題,也就是把檢測(cè)整體特性(給定直線或曲線的點(diǎn)集)變成檢測(cè)局部特性的問題[4]。
圖像空間中的任意解析曲線可以表述為


即圖像空間中屬于同一解析曲線的點(diǎn)經(jīng)過式(2)的變換后,都映射到參數(shù)空間中,且相交于由參數(shù)確定的點(diǎn)[4]。從而說明,只要圖像空間中屬于同一解析曲線的數(shù)據(jù)點(diǎn)足夠多,就可以通過判斷參數(shù)空間中個(gè)參數(shù)點(diǎn)的積累值來確定此曲線在變換空間的相交點(diǎn),從而確定此解析曲線的描述[4]。Hough變換適用于任何形式為的函數(shù),其中是坐標(biāo)向量,是系數(shù)向量[4]。
對(duì)于圓心坐標(biāo)為O(a,b)、半徑為r的圓在參數(shù)空間中的表示為

參數(shù)空間中,式(3)表示的是1個(gè)三維錐面。圖像空間中的圓對(duì)應(yīng)著參數(shù)空間中的1個(gè)點(diǎn),而圖像空間中的1個(gè)點(diǎn)(x,y)對(duì)應(yīng)著參數(shù)空間中的1個(gè)三維直立圓錐,該點(diǎn)約束了通過該點(diǎn)的一簇圓的參數(shù)(a,b,r)[4],如圖3所示。

圖3 參數(shù)空間示意Fig.3 Parameter Space Diagram
圖像空間中圓上任意一點(diǎn)對(duì)應(yīng)著參數(shù)空間的一個(gè)圓錐,且該圓錐必經(jīng)過點(diǎn)(a',b',r')。也就是說,圖像空間中該圓上的所有點(diǎn)都映射到參數(shù)空間中后,對(duì)應(yīng)的一簇圓錐相交最多的點(diǎn)坐標(biāo)為(a',b',r')[4],如圖3所示。
通過該點(diǎn)坐標(biāo)(a',b',r')可求出圖像空間圓的解析式,從而確定其圓心位置及半徑[4]。
3.3 算法實(shí)現(xiàn)
軟件的功能可以分為4個(gè)部分:初始化、自動(dòng)監(jiān)控、實(shí)時(shí)示警及文件形成。
3.3.1 初始化
初始化主要實(shí)現(xiàn)測(cè)試狀態(tài)的設(shè)置、算法參數(shù)的設(shè)置以及指示燈位置定位。初始化流程見圖4。
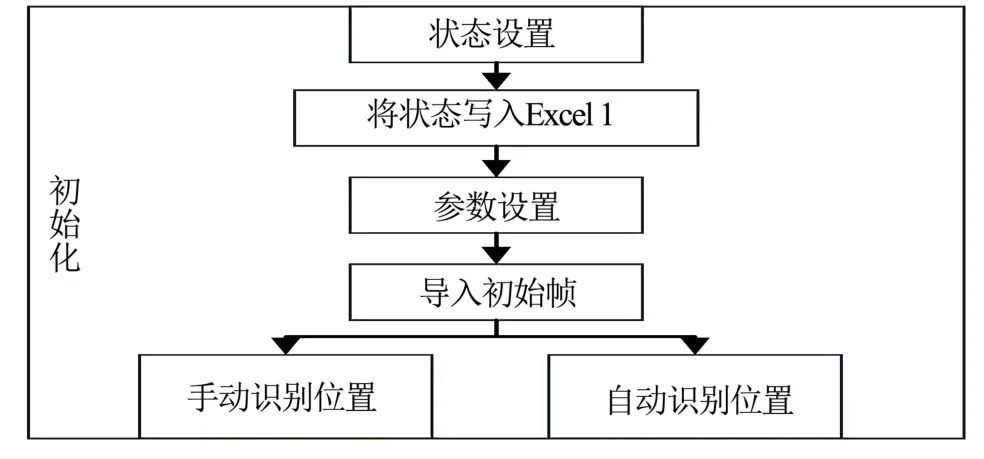
圖4 初始化流程Fig.4 Initialization Flowchart
保存測(cè)試狀態(tài)設(shè)置后,軟件自動(dòng)將其寫入Excel文檔1。算法參數(shù)設(shè)置中包含邊緣檢測(cè)參數(shù)(自動(dòng)識(shí)別算子)、Hough變換參數(shù)(角度步長(zhǎng)、閾值、最小圓半徑、最大圓半徑、檢測(cè)圓半徑步長(zhǎng)),以及指示燈的行列數(shù)。邊緣檢測(cè)參數(shù)即自動(dòng)識(shí)別算子,用于指示燈位置自動(dòng)識(shí)別過程;Hough變換的參數(shù)用于每一幀畫面中指示燈狀態(tài)的自動(dòng)識(shí)別;指示燈的行列數(shù)用于指示燈狀態(tài)矩陣的定義,以及手動(dòng)位置識(shí)別的指示燈總數(shù)確認(rèn)。
指示燈位置定位有手動(dòng)識(shí)別和自動(dòng)識(shí)別方式。按下“手動(dòng)識(shí)別”按鈕后,鼠標(biāo)會(huì)變成十字型,需要用戶在初始幀顯示界面依次單擊每個(gè)指示燈中心,通過讀取鼠標(biāo)位置獲取指示燈初始位置矩陣;自動(dòng)識(shí)別時(shí)會(huì)先將初始幀圖像灰度化,對(duì)其進(jìn)行邊緣檢測(cè),再利用Hough變換得到指示燈初始位置矩陣。具體流程如圖5所示。

圖5 自動(dòng)識(shí)別流程Fig.5 Automatic Identification Flowchart
用Hough變換方法檢測(cè)圓時(shí),首先對(duì)參數(shù)空間進(jìn)行適當(dāng)量化,得到1個(gè)三維的計(jì)數(shù)器陣列,其中每一個(gè)立體小方格對(duì)應(yīng)(a,b,r)的參數(shù)離散值。
將圖像空間的初始幀灰度化后,根據(jù)灰度的梯度信息,選取適當(dāng)閾值求出邊緣。計(jì)算與邊緣上每一點(diǎn)像素距離為r的所有點(diǎn)(a,b),同時(shí)將對(duì)應(yīng)的(a,b,r)立方體小格累加器加1。改變r(jià)值重復(fù)上述過程,當(dāng)對(duì)全部邊緣點(diǎn)變換完成后,對(duì)三維陣列的所有累加器值進(jìn)行比較,其峰值小格的坐標(biāo)就對(duì)應(yīng)著圖像空間中圓形邊界的圓參數(shù)(a,b,r)。
3.3.2自動(dòng)監(jiān)控
給每一幀圖像設(shè)置狀態(tài)矩陣,包含指示燈的位置坐標(biāo)及狀態(tài)。初始幀的位置采用初始化(手動(dòng)識(shí)別或自動(dòng)識(shí)別)結(jié)果,之后每一幀的位置計(jì)算方法與自動(dòng)識(shí)別過程相同。軟件通過指示燈位置處像素點(diǎn)的亮度變化提取狀態(tài)信息,通過當(dāng)前幀狀態(tài)矩陣與上一幀狀態(tài)矩陣的對(duì)比來識(shí)別指示燈狀態(tài)變化情況,并繪出相應(yīng)條形圖,將狀態(tài)變化寫入Excel2文件并列表顯示。
3.3.3 實(shí)時(shí)示警
建立語(yǔ)音庫(kù),每當(dāng)指示燈狀態(tài)矩陣發(fā)生變化時(shí),讀取相應(yīng)的語(yǔ)音文件并播放。
設(shè)置常見測(cè)試規(guī)律表,當(dāng)測(cè)試中出現(xiàn)不符合該表的情況時(shí)進(jìn)行特殊音效及彈框示警,并在彈框中說明故障模式。基本測(cè)試規(guī)律表如表1所示。

表1 基本測(cè)試規(guī)律表Tab.1 Basic Rules of Test
自動(dòng)監(jiān)控及實(shí)時(shí)示警流程見圖6。
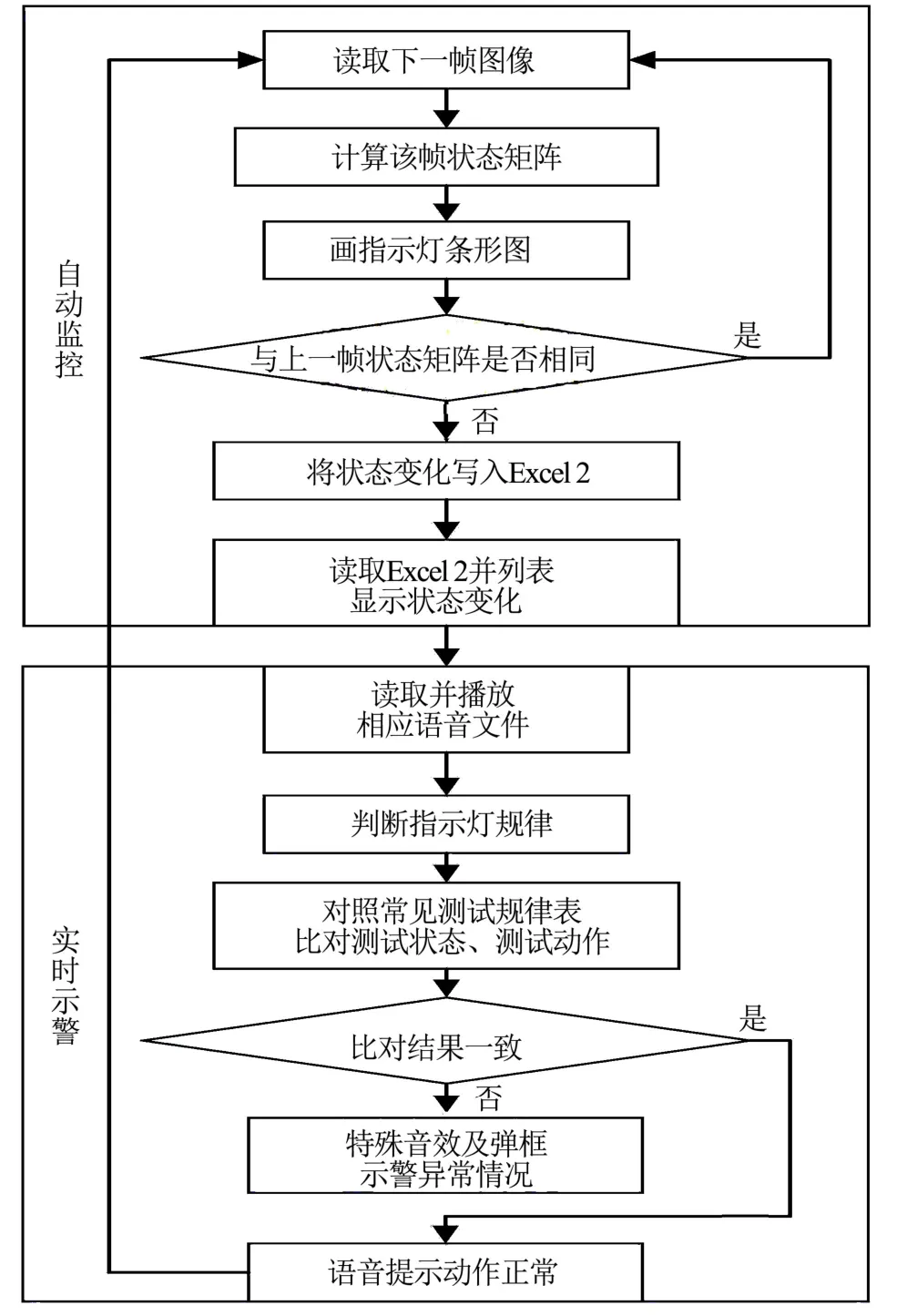
圖6 自動(dòng)監(jiān)控及實(shí)時(shí)示警流程Fig.6 Flowchart of Automic Monitoring and Real-time Warning
用戶在初始化模塊中設(shè)置好測(cè)試狀態(tài)后,保存狀態(tài)時(shí),軟件將狀態(tài)內(nèi)容寫入到Excel文件1。指示燈的狀態(tài)變化被軟件實(shí)時(shí)記錄到Excel文件2。當(dāng)用戶按下“生成報(bào)告”按鈕后,軟件讀取Excel文件1及Excel文件2,將其內(nèi)容寫入Word文檔,形成測(cè)試報(bào)告。
4 軟件的設(shè)計(jì)與實(shí)現(xiàn)
4.1 初始化模塊
初始化模塊中,用戶可以進(jìn)行測(cè)試狀態(tài)設(shè)置、參數(shù)設(shè)置與調(diào)整以及初始幀的指示燈的位置識(shí)別。
測(cè)試狀態(tài)設(shè)置包括測(cè)試人員、地點(diǎn)、日期以及當(dāng)前測(cè)試狀態(tài)。保存后,測(cè)試人員、地點(diǎn)、日期信息可用于Word文檔的一鍵生成,測(cè)試狀態(tài)用于故障模式的識(shí)別比對(duì)。
參數(shù)的設(shè)置與調(diào)整,指的是邊緣檢測(cè)的參數(shù)(自動(dòng)識(shí)別算子)、Hough變換的參數(shù)(角度步長(zhǎng)、閾值、最小圓半徑、最大圓半徑、檢測(cè)圓半徑步長(zhǎng)),以及指示燈的行數(shù)、列數(shù)。過參數(shù)變換對(duì)算法進(jìn)行優(yōu)化和比較。當(dāng)用戶不了解參數(shù)設(shè)置方法時(shí),可選用默認(rèn)參數(shù),不影響軟件的功能及使用。
初始幀的指示燈的位置識(shí)別有手動(dòng)和自動(dòng)2種方式,參數(shù)設(shè)置模塊中的參數(shù)應(yīng)用于此處的指示燈識(shí)別算法。該模塊用戶界面如圖7所示。
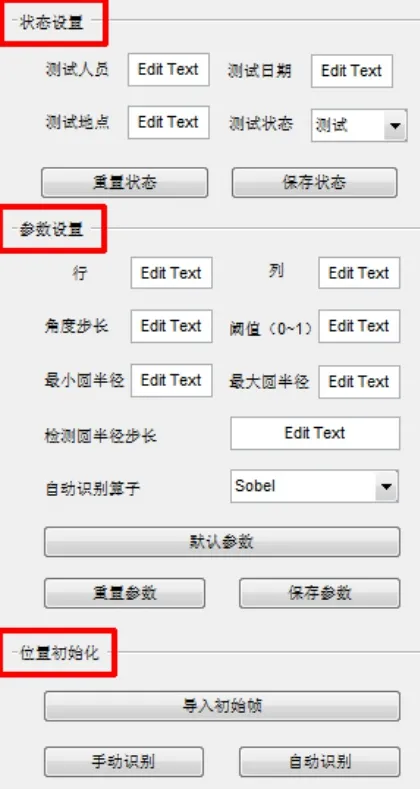
圖7 參數(shù)設(shè)置及位置初始化模塊Fig.7 Module of Parameter Setting and Location Initilization
單擊手動(dòng)識(shí)別按鈕后,鼠標(biāo)會(huì)變成十字線形狀,依次單擊視頻顯示區(qū)域初始幀上的指示燈后,在指定區(qū)域顯示手動(dòng)指示燈定位圖。單擊自動(dòng)識(shí)別按鈕后,軟件將自動(dòng)指示燈位置,并將自動(dòng)識(shí)別結(jié)果顯示在指定區(qū)域。
4.2 實(shí)時(shí)監(jiān)控模塊
實(shí)時(shí)監(jiān)控模塊包括視頻顯示、條形圖顯示、歷史狀態(tài)變換列表以及語(yǔ)音提示功能。視頻顯示區(qū)域呈現(xiàn)了當(dāng)前發(fā)控轉(zhuǎn)接組合的指示燈狀態(tài),條形圖將各個(gè)指示燈狀態(tài)按照“亮”、“滅”兩種狀態(tài)進(jìn)行了值為“1”、“-1”的柱狀的區(qū)別顯示,有助于更加直觀地觀測(cè)到指示燈狀態(tài)變化。
歷史狀態(tài)變換列表展示了當(dāng)前測(cè)試中指示燈的每一次狀態(tài)變化及時(shí)間,有助于輔助崗位人員進(jìn)行回顧與檢查,如圖8所示。
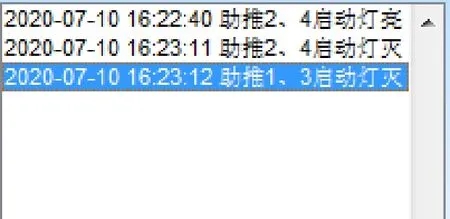
圖8 狀態(tài)列表Fig.8 State List
按下“語(yǔ)音提示”按鈕后,開啟語(yǔ)音提示功能。每當(dāng)指示燈狀態(tài)發(fā)生變化時(shí),播放相應(yīng)的語(yǔ)音文件。可以有效吸引崗位人員注意力,提醒崗位人員監(jiān)測(cè)地面電源電壓電流變化,避免了觀測(cè)指示燈的同時(shí)觀測(cè)不到電壓電流變化的尷尬。
4.3 實(shí)時(shí)示警模塊
當(dāng)測(cè)試過程中出現(xiàn)與常見測(cè)試規(guī)律表不符的情況時(shí),軟件會(huì)播放特殊音效進(jìn)行示警,在后臺(tái)自動(dòng)識(shí)別故障模式后,對(duì)故障模式進(jìn)行彈框提示,輔助指揮員快速進(jìn)行故障定位。
4.4 文件形成模塊
該模塊可以自動(dòng)記錄指示燈狀態(tài)變化情況到Excel文件,還可一鍵生成Word文檔。有助于記錄留存和測(cè)試過程的回顧復(fù)查。
綜上所述,該軟件不論是在設(shè)備狀態(tài)監(jiān)測(cè)及提示、異常情況快速示警及描述,還是在形成記錄文件上,都滿足了崗位設(shè)置的需求,彌補(bǔ)了人工錯(cuò)誤率高的缺陷。
5 結(jié)束語(yǔ)
本文立足于解決發(fā)控前端崗位發(fā)控轉(zhuǎn)接組合視頻的自動(dòng)監(jiān)控問題,從用戶需求分析入手,結(jié)合邊緣檢測(cè)和Hough變換原理識(shí)別指示燈的亮滅情況,設(shè)計(jì)并實(shí)現(xiàn)了發(fā)控轉(zhuǎn)接組合視頻監(jiān)測(cè)軟件。該軟件實(shí)現(xiàn)了發(fā)控轉(zhuǎn)接組合狀態(tài)變化的自動(dòng)播報(bào),輔助崗位人員更好地集中注意力,可以及時(shí)示警并輔助指揮員實(shí)現(xiàn)故障快速定位,并將測(cè)試過程的狀態(tài)變化自動(dòng)記錄到文件,給崗位人員和指揮員提供了便利。
下一步研究將著力于把視頻自動(dòng)識(shí)別技術(shù)應(yīng)用在控制系統(tǒng)的其他地面設(shè)備,結(jié)合前后端地面設(shè)備數(shù)據(jù)進(jìn)行聯(lián)合分析,衍生出故障快速定位等新生功能。
猜你喜歡
中國(guó)自動(dòng)識(shí)別技術(shù)(2023年6期)2024-01-12 08:13:22
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
水上消防(2019年3期)2019-08-20 05:46:08
特別健康(2018年3期)2018-07-04 00:40:18
發(fā)明與創(chuàng)新(2016年26期)2016-08-22 03:23:28
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
 導(dǎo)彈與航天運(yùn)載技術(shù)2021年5期
導(dǎo)彈與航天運(yùn)載技術(shù)2021年5期
- 導(dǎo)彈與航天運(yùn)載技術(shù)的其它文章
- 航天型號(hào)管理中的項(xiàng)目風(fēng)險(xiǎn)管理實(shí)踐
- 美國(guó)成功開展吸氣式高超聲速武器的首次飛行試驗(yàn)
- 長(zhǎng)征七號(hào)遙四運(yùn)載火箭成功發(fā)射天舟三號(hào)貨運(yùn)飛船
- 項(xiàng)目管理理論在某運(yùn)載火箭研制項(xiàng)目中的應(yīng)用
- 長(zhǎng)征五號(hào)運(yùn)載火箭電氣系統(tǒng)布局布線設(shè)計(jì)技術(shù)綜述與展望
- 運(yùn)載火箭金屬膜盒式蓄壓器振動(dòng)及疲勞特性研究分析