挖掘機配重重心自動檢測裝置設計
2021-10-25 02:28:36陳軍
電子測試 2021年19期
陳軍
(安徽理工大學機械工程分院,安徽淮南,232001)
0 引言
重心高度影響挖掘機操縱穩定性、平順性和安全性的重要指標。雖然挖掘機制造商通常會提供空載時挖掘機的相關參數,但當挖掘機的負荷變化顯著時,會改變挖掘機的重心。重心高度過高時,就會導致挖掘機在挖掘作業時,容易發生傾倒的風險,發生安全事故和財產的損失,重心的位置是結構設計中需要考慮的參數指標,提高挖掘機配重的合格率,那么就可以避免事故。因此,急需一種能夠通過檢測平臺快速/準確的測量大型結構件高度的檢測設備。
1 重心測量原理
1.1 重心測量方法現狀
在國外,他們很早就開始對大型結構的重心位置和位置的研究價值進行了深入研究,一些代表性的案例一般來自歐美等一些發達國家,比如對航天航空產品和一些交通工具的重心位置,這些研究案例完美的闡述了重心研究在結構設計的重要意義。
本文介紹了一種可以通過翻轉加靜態測量的方法模擬重心位置,并且通過多個傳感器數值進行模擬計算,最終得到重心的具體坐標。
由于操作方法簡單,人為干預因素少,測量結果精度高,檢測速度快,可傾斜平臺法被廣泛使用。
1.2 重心測量方法的原理設計研究
利用可傾斜平臺法測量配重重心,其測量示意見圖1。挖掘機的配重結構較為簡單,通過結構外形大小設計測量平臺尺寸。根據可傾斜平臺法的原理,利用稱重傳感器支撐設備結構,并測量出配重處于水平姿態和傾斜姿態時的各個傳感器測得的支撐力,下文中具體介紹了重心位置的具體計算思路和計算公式,其中如要思想是通過力矩平衡的方法假設重心位置后,通過數值模擬進行反推。
由圖1 可知,圖中左側是翻轉前的位置坐標系,翻轉前重心向平臺上側的投影點的位置和建立的原點位置,相對距離就是檢測結果中的x、y 坐標,x、y 坐標的數值影響重心對整個結構的偏差影響比較大,比如x 較大時候,安裝好的挖掘機就會有向一側傾倒的趨勢,因此x的數值偏差較大會導致挖掘機結構的平衡性差,通過圖1 右側的反轉效果顯示,在構建好的坐標系中,重心在坐標系上的投影會隨著設備翻轉而移動,設備翻轉的角度、物體重心的高度和重心移動的距離成一定的三角函數關系,通過三角函數轉換,可以計算出物體的重心高度Z。
在水平姿態時,配重重心坐標值在兩個坐標系下的關系如下:
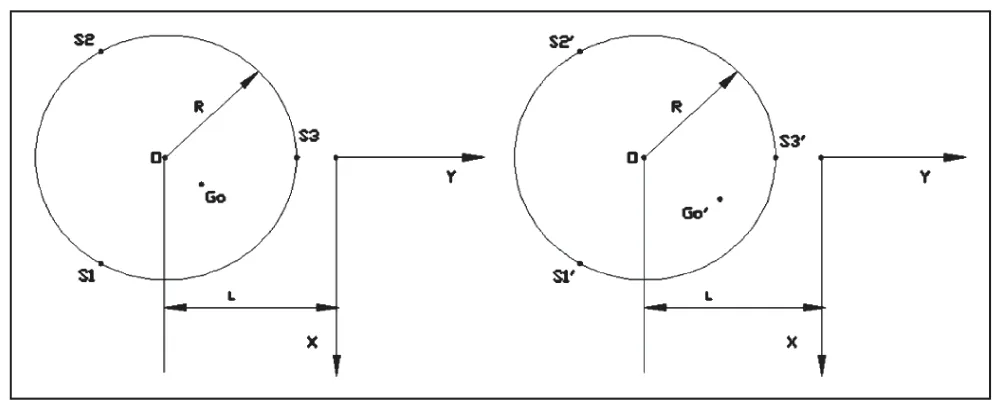
圖2 重心投影示意圖
在傾斜姿態時,翻轉盤發生了θ的傾轉,配重重心坐標值在兩個坐標系下的 關系如下:
建立求解方程的主要原理是力矩平衡原理,確定物體是平衡狀態,確定各方向的作用力投影之和及產生的力矩之和均為零,所得基本方程為:

需要確定主要的測量力是由稱重傳感器進行傳遞的,一共有3 只或4 只,4 只承重傳感器檢測原理和三只相同,對這些傳感器進行編號及分析最終為獲得的力為Fi(i=1,2,3,4),其位置坐標為(xi,yi)(i=1,2,3,4)。可將式子(4),具化為式(5):
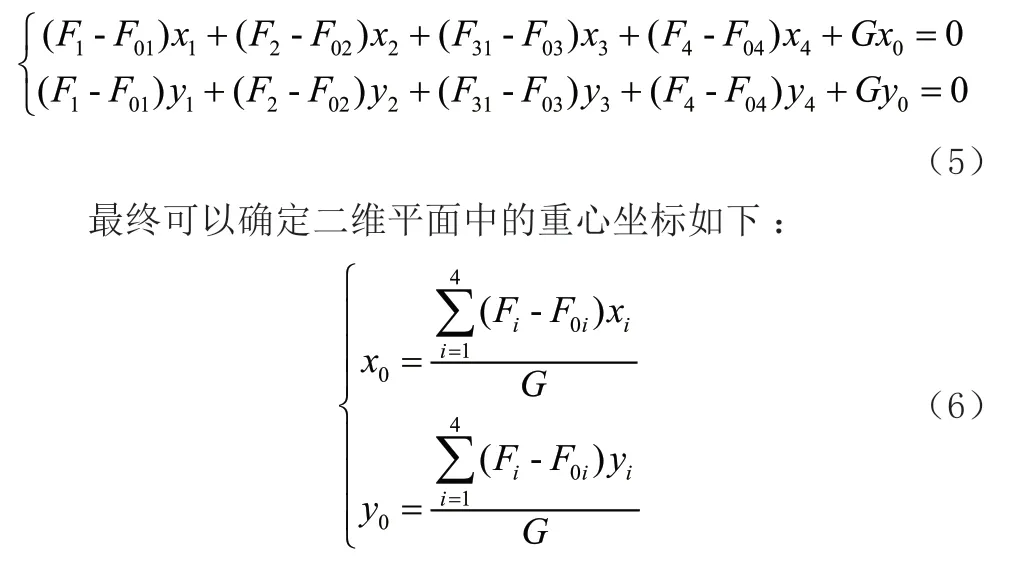
式中:
G 為挖掘機重力,單位為N;
(x0,y0)為測量的重心坐標,單位為mm;
F01,F02,F03,F04為測量加載前的傳感器的輸出力值,單位為N;
F1,F2,F3,F4為測量加載后的傳感器的輸出力值,單位為N;
x1,x2,x3,x4為四只傳感器的x 軸位置,單位為mm;
y1,y2,y3,y4為四只傳感器的y 軸位置,單位為mm。
依據(6)可以得到傾斜平臺后的重心坐標為:
考慮前面的傾斜原理,這里將發生的具體結構進行細化可得圖3 所示,可以得到整理的坐標值。圖3 中的y 坐標不發生改變。

為了消除測量裝置本身對測量的影啊,上述所需的測量量,為對測量裝置自重清零后得到結果。
2 重心測量平臺設計
2.1 重心測量平臺概述
為了研制挖掘機配重重心測量試驗平臺,本文通過對國內外各家單位設計的重心測量設備進行功能分解,確定了本文要硏制的挖掘機配重重心測量試驗平臺的研制方案,確定了挖掘機配重重心測量試驗平臺,由機械系統、傳感檢測與控制系統和其他輔助結構組成。
重心檢測平臺主要可分為翻轉盤和固定盤,翻轉盤上安裝配重殼體和定位夾緊機構,固定盤與振動平臺接觸,其下部裝有導向柱座,翻轉盤和固定盤之間通過氣缸或者油缸實現相對傾轉,其中液壓油缸比較適合大型配重的反轉需求,液壓有較大的推力和穩定性[6]。重心測量平臺結構如圖4 所示。定位機構和夾緊機構用來固定配重殼體的位置(未在圖中展示)。

圖4 重心測量平臺結構如圖
2.2 機械系統方案
重心測量試驗平臺機械系統的功能進行分解,針對各個功能,研究可行的方案。通過分析各個單位采用多點衡重法設計的測量設備可以看出,針對不同的測量對象,各個單位設計的測量裝置具體結枃差異很大,從機械結構原理上歸納,大體包括:測量平臺水平調節機構、基礎底座、被測物體限位機構、傳動機構等。以下,本文針對重心測量試驗平臺機械本體結構,按部件分別闡述其設計思路和具體分析。
(1)測量平臺水平
重心測量過程中,為了保證重心測量的準確性,必須保證本文所建立測量平臺坐標系與大地坐標系一致。這就需要利用水平調節機構來調整測量平臺坐標系下的X 軸和y 軸與水平面平行,Z 軸垂直于水平面。利用調平墊鐵來實現測量平臺基礎底座的水平高度的調節,配合分度值為2mm的框式水平儀作為水平調節基準,將測量平臺坐標系與大地坐標系調整到一致。調平墊鐵如圖5 所示。

圖5 調平墊鐵
(2)測量平臺角度調節
實現配重重心三坐標位置的精確測量,必須在測量過程中使翻轉盤與配重一起相對固定盤傾轉一定的角度,待系統穩定后測量各個傳感器壓力值。測量完成后,需將翻轉盤和配重恢復至水平姿態。因此,需要設計一種可以完成測量裝置傾轉運動過程中翻轉的角度值,因此需要一種具有較大推力且工作可靠的動力裝置來作為測量裝置傾轉的動力源。
本文選用液壓油缸來實現重心測量平臺翻轉盤的傾轉運動。液壓油缸有較大的推力和較高的控制精度可以滿足使用需求。
(3)測量平臺基礎底座
測量平臺基礎底座是結構設計的重要一環,通過多種方案的分析比較,考慮結構強度剛度的同時,因為需要測量重心的結構件多種多樣,因此測量平臺基礎底座的表面需要具有安裝多種工裝的多功能設計,同時測量平臺基礎底座的底側需要安裝四個壓力傳感器,測量平臺基礎底座的本身重心位置會影響四個傳感器的數值精確性,同時考慮到需要進行翻轉運動,因此需要安裝油缸和轉動軸,轉動軸的位置處安裝了角度編碼器,整個結構的設計需要考慮變形對傳感數值的影響。
(4)定位夾緊裝置
定位夾緊機構,簡稱“工裝”,工裝在機械領域十分常見,它保證了工業生產的正常進行。在挖掘機配重測量過程中同樣需要可靠的定位夾緊,配合測量配重重心的需要,在測量時翻轉上平臺與配重重心的相對位置必須固定,可以理解為傳感器一般安裝在某一固定位置,而配重也必須安裝在上平臺上面的某個固定的位置。
3 重心測量系統軟件設計
我們更具檢測方案設計了一款重心測量系統軟件,通過軟件可以實現對傳輸過來的一些模態值進行分析計算和補償,測量的重心測量要求一定要顯示出重心的位置與高度,重心高度不平衡,會影響工作質量和使用壽命[3],測量過程函數模塊如圖6 所示。
3.1 數據采集模塊
軟件系統應采集模塊的動態鏈接庫,在plc 程序編制中,需要根據傳感器連接變送器,將傳感器的模態量信號輸出采集到plc 內。
3.2 重量計算
稱重傳感器的原理是放置上的結構件導致傳感器移動塊位移,改變內部結構阻值,從而實現對重量的計算,在沒有放上配重前,整個翻轉結構設備的重量固定,包括固定工裝,通過行吊機構放置配重后,通過多個傳感器的數值和角度數值進行計算分析。
3.3 重心位置計算
設計開發本設備的目的是快速側量結構件重心的具體位置,通過四個壓力傳感器和一個角度編碼器的檢測數值,通過485 通訊把數值傳輸到計算中心的顯控plc 上,通過plc 內部編輯的函數控制模塊進行計算,同時這需要在數據采集后用一些誤差補償方法,通過一些數據處理函數的修正,可以通過編程技術,實現參數輸入[1]。
3.4 數據圖形顯示
通過現有的顯控觸摸屏技術,通過圖像模擬的方法把配重的檢測結果顯示在建立好的配重結構示意圖上,能夠讓設備使用人員快速直觀的觀察配重重心的所在位置。如圖7 所示。
3.5 打印輸出
為了便捷可視化的顯示檢測結果,通過plc 和打印機的通訊,把檢測的重心位置結果打印成位置標簽,把位置標簽貼在配重的特定位置上,便于下個工藝人員監測配重的重心屬性,成為挖掘機配重加工工藝上的重要一環[5],方便檢測人員檢查評估。見圖8 所示。
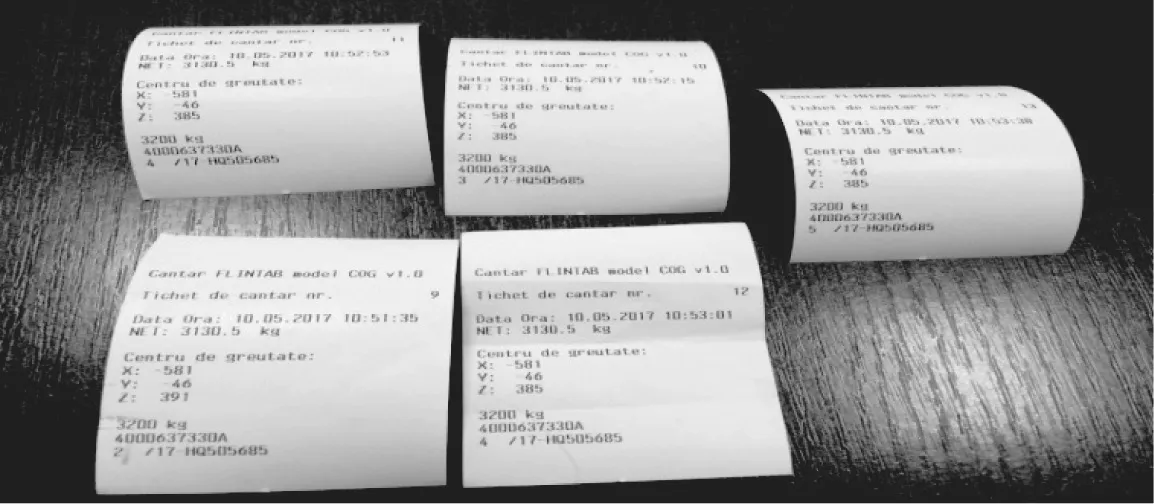
圖8 重心位置結果數據輸出
4 結論
結合實際使用要求確定plc 控制程序的設計,最終完成對于挖掘機配重重心高度的快速測量。節省工廠中對重心檢測所耗費的時間。此外,在結構設計和分析中找出影響重心高度的關鍵因素,進而進行誤差分析和補償[4],對所有大型結構件的設計過程中需要考慮重心位置時,本研究有重要參考意義。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
哲學評論(2021年2期)2021-08-22 01:53:34
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中華詩詞(2019年7期)2019-11-25 01:43:04
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
海峽科技與產業(2016年3期)2016-05-17 04:32:12
