基于變繩長雙擺模型的抓斗門座起重機吊重擺動控制研究
2021-10-25 02:54:20李威濤郭建生
起重運輸機械 2021年18期
李威濤 郭建生
武漢理工大學物流工程學院 武漢 430063
0 引言
目前,對于門座起重機吊重擺動的研究主要集中在單擺問題上,且研究中往往忽略掉繩長的變化,Vaughan[1]考慮塔式起重機的雙擺特性,當起重機起升到一定高度時,可能會引入高階的振蕩模式,因此設計了一種對系統固有頻率變化不敏感的輸入整形器,可以有效應對一定繩長變化范圍內的振蕩。張曉華等[2]設計了一種改進EI輸入整形器,當起重機做回轉與起升復合運動時也能一定程度上控制吊重擺動,但控制效果一般。當吊具大小不可忽略以及鋼絲繩長度發生變化時,傳統的單模態輸入整形器很難對吊重擺角進行有效的控制。本文以抓斗門座起重機吊重擺動系統為研究對象,考慮抓斗擺動和繩長變化,研究基于變繩長雙擺模型吊重擺動控制的輸入整形技術研究。
1 吊重變繩長雙擺動力學模型
如圖1所示,通過在立體空間建立直角坐標系O-XYZ,得到了起重機吊重變繩長雙擺系統的物理模型。將坐標系原點O定為起重機的吊重懸掛點所處的水平面和回轉過程中心線的交點,假定平面XOY為水平面,M點為抓斗質心,其質量為m,E點為抓斗懸掛點;OE為起重機作變幅運動時懸掛點運動的軌跡,懸掛點在OE方向的位移為s;起重機作起升運動時,抓斗在EF方向上運動,鋼絲繩EF的長度為l;鋼絲繩下節點距離抓斗質心距離為r;起重機作回轉運動時,Y坐標軸與直線OE的夾角大小為α,鋼絲繩EF在平面ZOE上的投影EB與豎直方向直線EA的夾角大小為θ1,鋼絲繩EF與其在平面ZOE上的投影EB的夾角大小為θ2,抓斗中心線FG在平面ZOE上的投影FD與豎直方向直線FC的夾角大小為θ3,抓斗中心線FG與其在平面ZOE上的投影FD夾角大小為θ4。抓斗繞變幅方向的轉動慣量為J1,繞回轉方向的轉動慣量為J2。吊重擺動系統物理模型示意圖如圖1所示。

圖1 吊重變繩長雙擺系統物理模型示意圖
根據拉格朗日運動方程,推導出吊重變繩長雙擺動力學微分方程為

計算得系統前四階固有頻率為
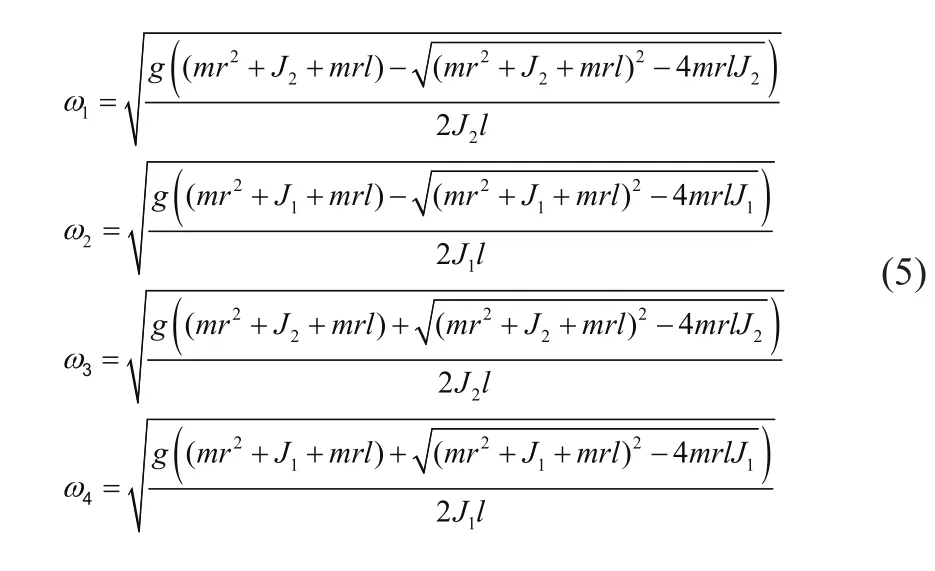
可知系統固有頻率與繩長有關。
式中:ω1為系統第一階固有頻率,ω2為系統第二階固有頻率,ω3為系統第三階固有頻率,ω4為系統第四階固有頻率。
ω1、ω2、ω3、ω4按數值從小到大排列,其中前 2階固有頻率主要引起鋼絲繩的擺動,后2階固有頻率主要引起抓斗的擺動。
計算得系統前4階阻尼比為

可知系統阻尼比與繩長和起升速度均有關。
2 基于雙模態模型的改進ZV整形器設計
2.1 雙模態輸入整形器設計方法
考慮抓斗尺寸較大,繞質心擺動不能忽略,存在二階振動模態。當需要同時抑制鋼絲繩和抓斗的擺動時,單模態輸入整形器已經無法起到良好的控制效果,此時需要設計雙模態輸入整形器對鋼絲繩及抓斗擺動同時進行控制。包艷等[3]提出了雙模態輸入整形器的2種設計方法:聯立方程法和卷積法。卷積法設計相對簡單且可以更好地抑制高模態振動,故本文采用卷積法設計雙模態輸入整形器。卷積法的基本原理是首先針對每個振動模態設計相應的單模態輸入整形器,最后將2個單模態輸入整形器進行卷積運算得到雙模態輸入整形器。針對本文所示的抓斗門座起重機,就需要分別設計抑制鋼絲繩擺動及抓斗擺動的單模態輸入整形器,為提高起重機的運行效率,本文使用單模態ZV輸入整形器為基礎設計雙模態ZV輸入整形器。
2.2 回轉與起升工況輸入整形器設計
抓斗門座起重機回轉與起升復合運動時,主要引起鋼絲繩擺角θ2以及抓斗擺角θ4的擺動,由于離心作用,同時也會引起鋼絲繩擺角θ1和抓斗擺角θ3的擺動,此次設計考慮使用輸入整形方法控制θ2及θ4的擺動,即系統第一階和第三階的振動。第一階模態的ZV輸入整形器頻域形式表達式為
第三階模態的ZV輸入整形器頻域形式表達式為

將第一階模態的ZV輸入整形器與第三階的ZV輸入整形器進行卷積運算得到雙模態ZV輸入整形器頻域表達式為

2.3 改進的雙模態ZV輸入整形器控制算法
傳統的雙模態ZV輸入整形器可以很好地抑制抓斗門座起重機定繩長工況下鋼絲繩和抓斗的殘余擺角,但本文的抓斗門座起重機復合工況中存在起升運動,造成繩長l和起升速度i均隨時間發生變化,造成吊重變繩長雙擺系統的固有頻率ωn和阻尼比ξ也會隨著時間發生變化。此時傳統的雙模態ZV輸入整形器已經無法有效地控制鋼絲繩及抓斗的擺動,文獻[4]提出一種等步長搜索算法得到吊重變繩長系統的等效固有頻率ωnd和等效阻尼比,但這種算法時間復雜度很高。這里提出了一種快速搜索等效繩長l及等效起升速度的改進等步長算法,從而快速得到等效固有頻率ωnd和等效阻尼比,從而設計了基于雙模態模型的改進ZV輸入整形器。
在門座起重機實際的工作過程中,假設鋼絲繩最長為lmax,最短為lmin,起升速度最大為,最小為0,可采用兩次等步長的搜索方法求出鋼絲繩的等效繩長l0,采用一次等步長法分別求出等效起升速度,以進行改進雙模態ZV輸入整形器的設計,具體過程為
1) 將繩長[lmin,lmax]等間距取11個繩長節點,設長度分別為l1、l2、…、l11,將起升速度等間距取5個起升速度節點,設起升速度分別為
2) 取繩長為l1,取起升速度為由式(5)、式(6)得到系統的固有頻率ωn和阻尼比ξ,根據式(9)進行回轉與起升工況雙模態ZV輸入整形器參數的設計;
3) 由式 (1)~ (4)分別對 θ1、θ2、θ3、θ4求解,可以得到鋼絲繩殘余擺角θ1與θ2,抓斗殘余擺角θ3與θ4數量和的最大值,設為 θmax1、 θmax2、…、θmax5;
4) 取繩長分別為l2、l3、…、l11,重復進行步驟(2)和 (3),分別得到 θmax6、θmax7、…、θmax55,比較 θmax1、θmax2、…、θmax55的大小,取出其中最小值,得到與之對應的繩長l0和等效起升速度;
5) 找到步驟(4)中l0,減1得到lmin,下標加1得到lmax(若l0為10則lmin取10,若l0為20則lmax取20),再依次進行步驟2)、步驟3)、步驟4),在進行步驟2)時起升速度取第一次迭代計算得到的等效起升速度,即可得到最終的等效繩長l0,根據l0、可以求出等效頻率ωnd和等效阻尼比。
搜索鋼絲繩的等效繩長的過程中用到了迭代算法,通過2次等步長法提高了搜索效率,可以快速地得到等效繩長。由于起升速度本身變化范圍不大,考慮到降低算法的時間復雜度,搜索等效起升速度只采用了1次等步長法。
3 吊重擺動控制數值研究
為了求得控制吊重擺角的最優參數,本章同時搜索了相同工況下的基于單模態模型的等效繩長ld0和等效起升速度,單模態模型指的是將抓斗考慮為質點建立動力學模型,并求出系統的第一階固有頻率(控制鋼絲繩擺動)和阻尼比,由此設計單模態ZV輸入整形器,通過單模態輸入整形器來控制前文所述建立的吊重變繩長雙擺模型的鋼絲繩及抓斗擺動,通過與前文所述類似的搜索算法求得變繩長工況下的等效繩長ld0和等效起升速度,由于算法原理類似,不再贅述。
選取型號為MQ2533某四連桿抓斗門座起重機的實際參數為基礎,選取起重機擺動仿真參數,門座起重機的鋼絲繩擺角θ1和θ2以及抓斗擺角θ3和θ4與起重機的運動相互耦合,回轉和起升運動都可以對擺角大小產生較大影響,為了讓門座起重機的吊重擺動控制更具有工程應用價值,參考MQ2533門座起重機實際工作情況,取鋼絲繩的初始長度為20 m,鋼絲繩長度變化為20 ~10 m,即起升高度為10 m;門座起重機的初始回轉角度定為0°,回轉范圍為0°~90°。
以定繩長l1、l2、…、l11和定起升速度分別組合進行雙模態ZV輸入整形器的設計,通過四階龍格庫塔對方法鋼絲繩及抓斗擺角進行數值求解,第一次搜索時最大殘余擺角和與計算繩長與起升速度的關系曲線如圖2所示。
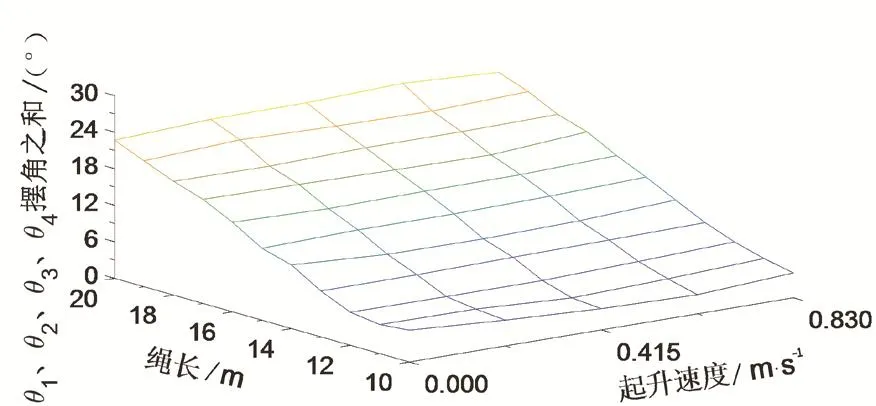
圖2 最大殘余擺角和值與計算繩長、起升速度曲線

圖3 第二次搜索最大殘余擺角和值與計算繩長的關系曲線
由圖3可以明顯看出,當以繩長l=10.1 m為進行雙模態ZV輸入整形器設計時,得到的最大殘余擺角和最小,此時最大殘余擺角和為3.047°,可得抓斗門座起重機回轉與起升復合運動工況下等效繩長l0為10.1 m,等效起升速度為0.622 5 m/s。
基于單模態模型的等效繩長ld0為13.2 m,等效起升速度為0.415 m/s。
采用四階龍格庫塔法對吊重變繩長雙擺系統微分方程進行數值求解,可以得到未經過整形、經過基于單模態模型的改進ZV輸入整形的、經過基于雙模態模型的改進ZV輸入整形后的擺角θ1、θ2、θ3、θ4曲線對比圖,如圖4所示。

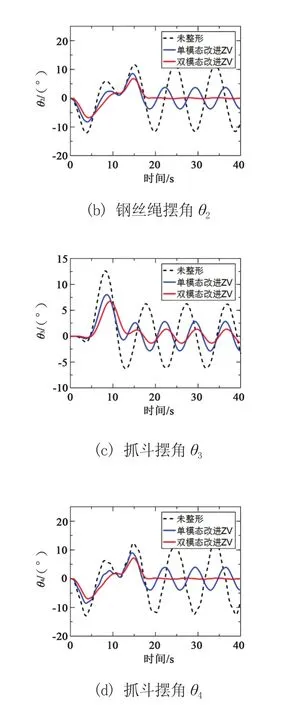
圖4 鋼絲繩及抓斗擺角曲線對比圖
輸入整形前后抓斗門座起重機回轉與起升運動復合運動吊重的最大殘余擺角如表1所示。

表1 回轉與起升復合運動吊重最大殘余擺角值 (°)
4 結論
1) 對門座起重機的工作機構進行了適當的簡化處理,并做出了部分假設,在此基礎上考慮繩長變化、抓斗擺動建立了門座起重機吊重變繩長雙擺動力學模型,根據拉格朗日分析力學的方法推導出動力學微分方程。
2) 介紹了雙模態ZV輸入整形器的設計方法,設計了抓斗門座起重機回轉與起升復合運動工況下雙模態ZV輸入整形器;為了對變繩長模型的門座起重機進行吊重雙擺擺動控制,基于雙模態ZV輸入整形原理提出了一種基于雙模態模型的改進ZV輸入整形器控制算法,其基本原理是采用兩次等步長的搜索方法快速求出吊重擺動系統的等效繩長,一次等步長方法求出等效起升速度,從而得到等效固有頻率和等效阻尼比。
3) 根據門座起重機實際運動工況確定了起重機回轉和起升運動時的仿真參數;在Matlab中編寫了相應的數值仿真程序,對門座起重機回轉與起升復合運動工況進行了吊重擺動控制數值仿真分析,綜合比較未整形、基于單模態模型的改進ZV輸入整形和基于雙模態模型的改進ZV的3種模型的鋼絲繩及抓斗擺角。仿真結果表明,基于雙模態模型的改進ZV輸入整形技術能有效地減少鋼絲繩及抓斗殘余擺角,而且控制相對基于單模態模型的改進ZV輸入整形技術有較大提高。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39
