無人機激光雷達系統在線路勘測中的應用
2021-10-23 03:05:50朱偉鑫何卓陽阮永洪謝爭云廖子毅李遴鈺
電力安全技術 2021年9期
丘 丹,朱偉鑫,何卓陽,阮永洪,謝爭云,廖子毅,李遴鈺
(廣東電網能源發展有限公司,廣東 廣州 510000)
0 引言
近年來無人機(unmanned aerial vehicle,UAV)技術發展迅速,其憑借高度的靈活性和相對低廉的數據獲取成本,被廣泛應用于輸電線路領域;而激光雷達(light detection and ranging,LiDAR)技術以作業場景大、空間數據獲取速度快、自動化程度高、精度高、數據量大、時效性好、通用性強等特點著稱,目前激光在信息領域的應用技術已經發展出激光成像、測距、傳感、探測、通信、信息處理、顯示、存儲等多個方向,對推動國家信息化、電力行業等民生及國家重大戰略安全領域做出了巨大貢獻。
在此基礎上,針對特殊地形、交叉跨越情況復雜的輸電架空線路工程項目中人工勘測準確度低的問題,提出了引入UAV LiDAR系統進行勘測。首先利用搭載激光雷達系統的無人機對目標線行通道進行巡視,采集數據,形成三維模型;然后利用三維模型對施工關鍵點進行多維度測量、定量分析,包括樹障點云的全自動快速分類,還原植被下地表的地形地貌,獲得交叉跨越距離、長度、角度準確數據等,提高了地理空間三維信息數據的獲取精度和處理效率,有助于全面了解現場情況,便于項目安全、可靠實施,驗證UAV LiDAR系統在輸電線路現場勘測中的優勢。
1 人工勘測與UAV LiDAR系統勘測能力對比
以某地區220 kV某線路技改工程為例,結合工程數據討論分析UAV LiDAR系統在輸電線路跨鐵路架線施工中的應用。涉及該線路原n—(n+1)檔跨越鐵路電力線路10 kV自閉線,施工區段地形主要以丘陵和山地為主,其中丘陵約占70 %,山地約占30 %;沿線山地以經濟林為主,生長桉樹、松雜樹、藤蔓、蕨類等原生性亞熱帶常綠闊葉林種。
1.1 人工勘測情況
該區段位于山谷地帶,道路交通十分不便。n—(n+1)檔跨越鐵路電力線路10 kV自閉線z—(z+1)桿,跨越處地勢較低,植被十分豐富且高大,種植有較多桉樹,高約20~30 m,無法看清沿線交叉跨越情況,容易遺漏部分跨越物。
n—(n+1)檔與鐵路交叉跨越情況見表1。因樹障影響視線,無法利用經緯儀、全站儀進行數據測量,只能定性、模糊處理。若必須使用經緯儀、全站儀測量,則需砍伐林道,疏通視線,但鄰近電力線路砍樹存在觸電、火災風險,樹木傾倒失控造成人員傷亡等風險,且需要耗費大量人力。在植被茂密的山區巡察,還存在蚊蛇蟻獸傷害等風險。
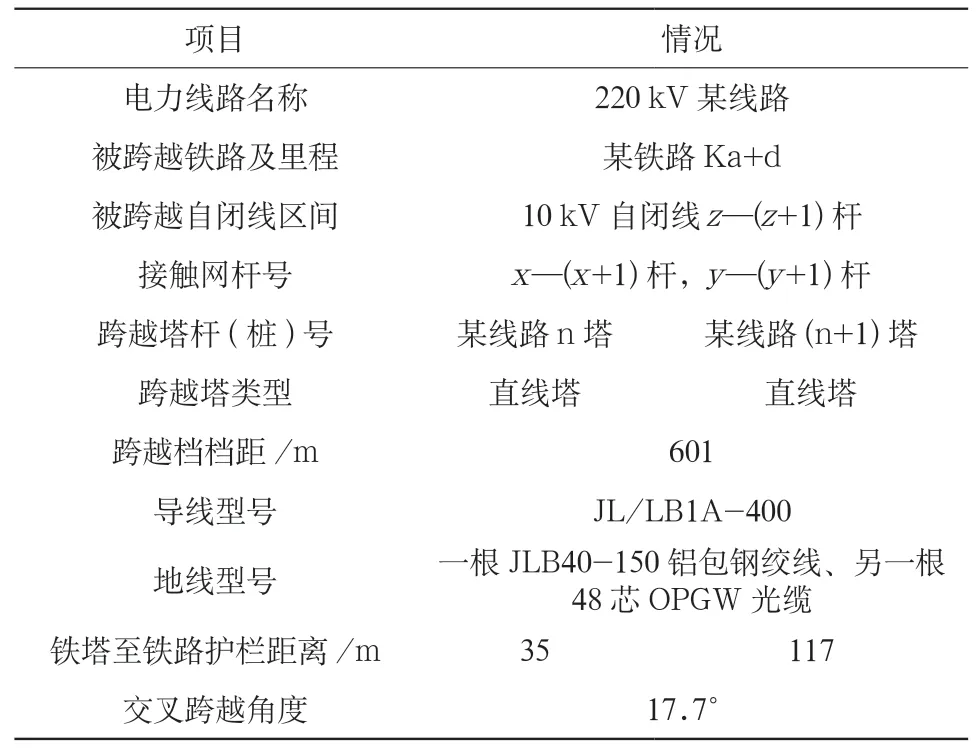
表1 n—(n+1)檔與鐵路交叉跨越情況
通過現場初步勘察,發現原n—(n+1)檔(跨越鐵路10 kV自閉線)地處山地,地形條件較差,植被十分豐富且高大,對視線通暢造成困擾,僅靠傳統的人工現場勘察,難以全面、精確了解現場情況,無法制定周全的施工方案。
1.2 UAV LiDAR系統引入現場勘測
引入UAV LiDAR系統對線行通道展開巡視,原n—(n+1)檔跨越鐵路10 kV自閉線。結合相應軟件系統,生成現場三維模型,精準測出交叉跨越物間的最小距離、交跨長度等數據。該項目所使用的激光雷達發射的脈沖穿透性強,可穿透樹木植被掃描到地表數據,并可根據激光脈沖強度精準分類出植被及地表,還原植被下地表的地形地貌。實踐表明,結合前期UAV LiDAR系統現場勘測結果及后期數據處理分析,獲得較為全面、準確的現場勘察信息,有利于制定可行性、安全性更高的施工方案,確保作業項目高質量開展。
2 工程論證及方案制定
2.1 搭設跨越架保護措施
人工現場初步勘察時,擬采用搭設跨越架作為保護措施,經過UAV LiDAR系統數據分析,認為該方案不可行。原因如下:
(1) 某10 kV自閉線對地距離偏高,最高達25.28 m。對照上述分析結果,發現交叉跨越段10 kV自閉線對地距離普遍較高(16.31~25.28 m),超出普通跨越架搭設高度,存在較大安全風險,并需要組織專家論證可行性。
(2) 去除植被后地形地質情況顯示,該區域地形高低不平,坑洼較多,跨越架生根困難,穩定性較差,安全無法保障。若搭設跨越架,需大面積砍伐林木,無法獲得林業部門批準,且鄰近帶電線路容易發生火災、壓斷導線等事故。
2.2 改造跨越處10 kV自閉線兩基直線水泥桿
人工現場初步勘察時,擬采用將跨越處10 kV自閉線兩基直線水泥桿改造為耐張段的施工方法,經與產權單位鐵路局溝通協調后,確認該方案不可行,原因是鐵路局不同意改變線路的電氣結構。
2.3 跨越處10 kV自閉線耐張段停電降線
通過UAV LiDAR系統了解到,該跨越處10 kV自閉線耐張段共3檔,約1.1 km,測量出220 kV某線路對10 kV自閉線交跨距離。距121號塔475.562 m處,220 kV某線路對10 kV自閉線凈空距離最小(14.65 m)。因此,在不改變線路電氣結構的前提下,申請10 kV線路停電降線,成功配合了220 kV某線路拆舊線施工。
基于UAV LiDAR系統測得的數據信息,對上述三種方案進行對比分析,論證結果是第三種方案可行性高,依據方案對跨越處10 kV自閉線耐張段停電降線,成功拆除了220 kV某線路原n—(n+1)檔舊線行(跨越鐵路電力線路10 kV自閉線z—(z+1)桿)。該次項目的成功開展,得益于UAV LiDAR 系統在現場勘察中所發揮的準確性、全面性、實用性等優勢,是UAV LiDAR系統在輸電架空線路中的成功應用。
3 人工勘測與UAV LiDAR系統勘測對比
以該項目220 kV某線路技改工程為例,分析傳統人工勘測和利用UAV LiDAR系統勘測這兩種方式的優劣。
3.1 傳統人工勘測方式
(1) 優點:能夠直觀了解后期交通運輸、青賠協調等事宜,也便于聯系沿線的交通運輸部門、跨越物產權單位、村民等,此方式在施工現場普遍使用,是施工準備階段必不可少的一道基本工序。
(2) 缺點:人工爬山,存在蚊蟲蛇蟻叮咬的風險;必須到達鐵塔樁位才能開展勘測作業,遇惡劣天氣時,存在道路塌方、倒塌風險,安全性較低;人員配置較多,至少兩人結伴出行,路上耗費時間太多;對某些處于高山密林的鐵塔樁位,甚至數次繞道依然無法抵達鐵塔樁位。人的視線有限,易受林木、山坡阻擋,導致無法使用經緯儀、全站儀等常用測量工器具,僅依靠人的感官進行判斷,易受天氣、個人定勢思維的影響無法得出較準確的結果,甚至得出錯誤結論,準確性較低。
僅人工勘測的單次費用而言,成本較低,但考慮到無法得到準確的數據,需多次勘察以致效率低下影響施工進度,不適宜單獨采用。
3.2 UAV LiDAR系統勘測方式
(1) 優點:勘察人員無需抵達塔位、交跨處,省去了翻山越嶺的辛苦和危險,安全性高;UAV LiDAR系統巡視速度可達20 km/h,30 min內可完成對特定塔段的勘察,效率高;可定量得出準確的數據,更全面了解地形地貌、跨越物等,準確度高。
本文構建的機會創新性與資源拼湊模式匹配關系模型,能夠指導初創企業的創業行為,幫助初創企業獲得較高的創業績效。同時,能夠促使創業者從機會創新性和資源拼湊的雙重視角思考創業問題,正確判斷機會的創新程度,充分利用手頭資源和社會關系網絡,最大化創造價值,實現創業成功。但本研究的案例企業僅來自天津、深圳和成都三個城市,缺少其他地區的樣本分析,未來會采用大樣本統計方法進一步驗證研究結論。
(2) 缺點:需要使用專業設備(搭載激光雷達系統的無人機以及專業的數據分析軟件),需要專業人員配合開展數據處理和分析,單次使用費用較高;僅靠UAV LiDAR系統進行現場勘測,難以全面了解評估交通運輸和青賠協調情況,不利于后期開展施工。
目前,傳統人工勘測方式仍然是最普及、最簡單的一種方式。有條件的情況下,針對特殊地形、惡劣環境,可有效利用UAV LiDAR系統實施勘測。兩種方式有機結合,能夠更加全面、直觀、準確地了解項目,同時有利于制定更加安全、可靠的施工方案。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
建材發展導向(2022年10期)2022-07-28 03:04:36
建材發展導向(2021年18期)2021-11-05 09:19:50
建材發展導向(2021年9期)2021-07-16 07:11:36
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國房地產業(2016年2期)2016-03-01 01:25:48